
基于DSP和弱磁控制算法的纯电动汽车电机控制系统
2016-05-25 00:37魏丽君
微特电机 2016年5期
陈 庆,魏丽君,熊 异
(1.中南大学,长沙 410083;2.湖南铁道职业技术学院,株洲 412001)
基于DSP和弱磁控制算法的纯电动汽车电机控制系统
陈 庆1,2,魏丽君2,熊 异2
(1.中南大学,长沙 410083;2.湖南铁道职业技术学院,株洲 412001)
以TMS320F28035作为控制核心,驱动电动机采用额定电压仅为48 V的低压电机,设计了一套纯电动汽车的电动机控制器及转子磁场定向矢量控制系统。对整个系统的控制系算法进行优化改进,提高了电动汽车安全性的同时,实现电动汽车在运行过程中能提供尽可能大的转矩和达到比较高的效率。
纯电动汽车;电机驱动;弱磁控制算法;效率优化策略
0 引 言
能源问题是21世纪最主要的问题之一,电动汽车作为一种新型能源汽车,是解决能源危机的一种有效途径,因此,近年来,对电动汽车的研究日趋增多。但总体来说,我国电动汽车电机驱动控制器的研究还比较落后,自身研发能力不强。目前,大多数电动汽车控制器的电机驱动都是采用高压加IGBT的形式,虽然增加了转矩,但一旦漏电,就会对人体产生致命危害。
针对此问题,本文以TMS320F28035作为控制核心,驱动电动机采用额定电压仅为48 V的低压电机,设计了一套纯电动汽车的电机控制器及转子磁场定向矢量控制系统。对整个系统的控制系算法进行优化改进,提高了电动汽车安全性的同时,实现电动汽车在运行过程中能提供尽可能大的转矩和达到比较高的效率。
1 总体方案
整体设计的系统框图如图1所示。它主要包括异步电动机控制器、三相感应电动机、固定速比变速器、电池管理系统等。电机驱动与电池能量管理紧密相联,而电池管理系统为整个系统提供可靠的供电保障。电机驱动部分与电源管理部分通过CAN总线通讯。

图1 车辆控制系统结构框图
本文中,采用基于弱磁控制算法的电动汽车电机驱动系统改变传统的电机矢量控制算法,同时利用DSP实现基于电机弱磁控制算法,其驱动系统框图如图2所示。首先通过对TMS320F2808的PWM模块进行配置,输出6路可单独控制PWM。得到改进的弱磁控制算法,最后由带直通的PWM来驱动逆变器的功率管。
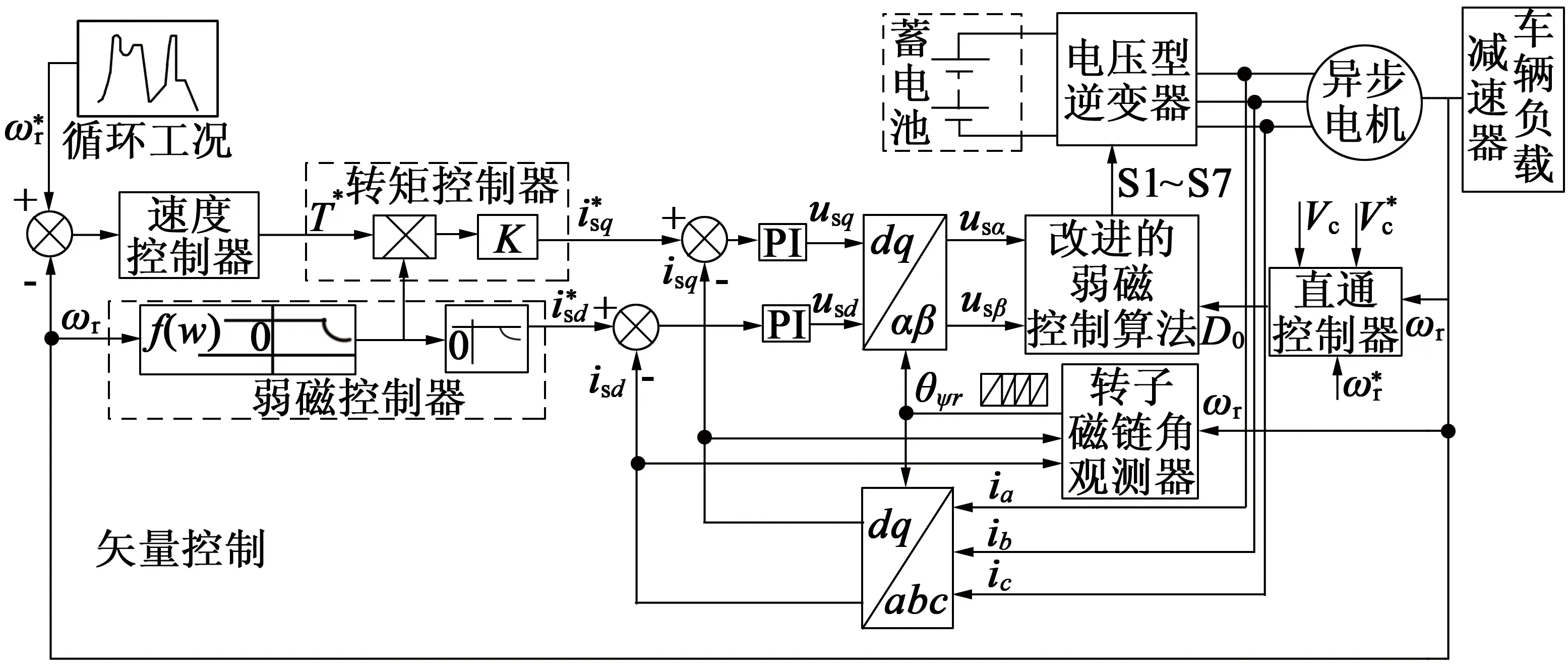
图2 基于弱磁控制算法的电动汽车驱动系统框图
2 系统硬件设计
本系统设计的电动汽车电机控制器总体框图和实物图如图3所示。本系统采用48 V电池作为控制器母线电压输入,主驱电机为鼠笼式异步电动机,采用TMS320F28035作为控制器主控芯片,功率逆变桥部分采用大电流MOSFET并联,电流采样采用新型的电流采样芯片MLX91205。整个控制器状态的检测采用上位机来监测,控制器与上位机之间通过CAN通信来实现数据的传输。

图3 电动汽车电机控制器框图
电流检测电路的连接图如图4所示。电路采用磁集极霍尔传感器MLX91205。
磁集极霍尔传感器具有和磁阻传感器相当的检测灵敏度,但在非线性和磁滞现象方面得到了明显改善,而且比一般的霍尔传感器在灵敏度、非线性和磁滞现象方面都要好。它的典型响应时间只有3 μs,已经广泛应用在PWM 控制以及过载保护中检测电流信号,可以实现快速保护。

(a)未加导电条(b)加上导电条
图4 MLX91205的实物连接图
通过试验比较了距离与电流的关系,部分试验波形如图5所示。由电磁学理论可知,距离r增大,磁场强度B减小。因此,传感器和导线之间的距离越小,传感器的输出电压就越大。

(a)r=9.2mm,I=52.7A,Umax=0.76V(b)r=16.2mm,I=52.8A,Umax=0.52V
(c)r=9.2mm,I=300A,Umax=3.4V(d)r=16.2mm,I=300A,Umax=2.6V
图5 测试所得波形
3 高速时电机的弱磁控制
电机高速运行状态下,转子磁场需要在电机转速提升时下降,即弱磁运行。电动汽车对电机驱动系统的弱磁运行性能有较高要求,当供电的电压一定时,电机转速升高后,转子反电势不断升高,供电电压无法满足,所以弱磁控制方法的选择非常重要。在满足电机及逆变器的电压和电流限制条件下,得到尽可能大的电机转矩输出、功率输出及良好的系统动静态特性。
电动汽车电机运行状态和电池特性直接会影响电机逆变器的母线电压,会使母线电压产生波动,因此,为了可以在高速弱磁运行状态或其他全速度范围内保持电机转矩可控性,电压必须保持一定余量。因此,本文中首先假定母线电压不变,按照磁链与速度成反比的关系进行高速弱磁控制,这也是最常见的弱磁控制方法。
在以转子磁场定向矢量控制下时有:
高速时电阻压降可以忽略,从以上两式可得:
采用转子磁场定向后,有:
电机高速运行时,ωr≈ωs则:
从上式可以得出,在空载时可以保证U恒定不变,U随电机负载增加而增加;另外逆变器母线电压是波动的,这给电机弱磁控制增加了难度。由此可得,传统弱磁方法并不能在整个电动汽车运行过程中产生最大的转矩,本系统设计采用先进的弱磁控制算法,其控制框图如图6所示。同过判断d轴和q轴电压来判断系统是否进入弱磁区,在进入弱磁区后,通过PI调节器来自动调节励磁电流和转矩电流的分配。
(1)在恒转矩区域,电机运行在基速以下,在这个区域电机所需电压矢量的幅值没有超过usmax,电机运行可以保证isd,isq达到其额定值,从而能够产生最大转矩。其电机电流分配方程如下:
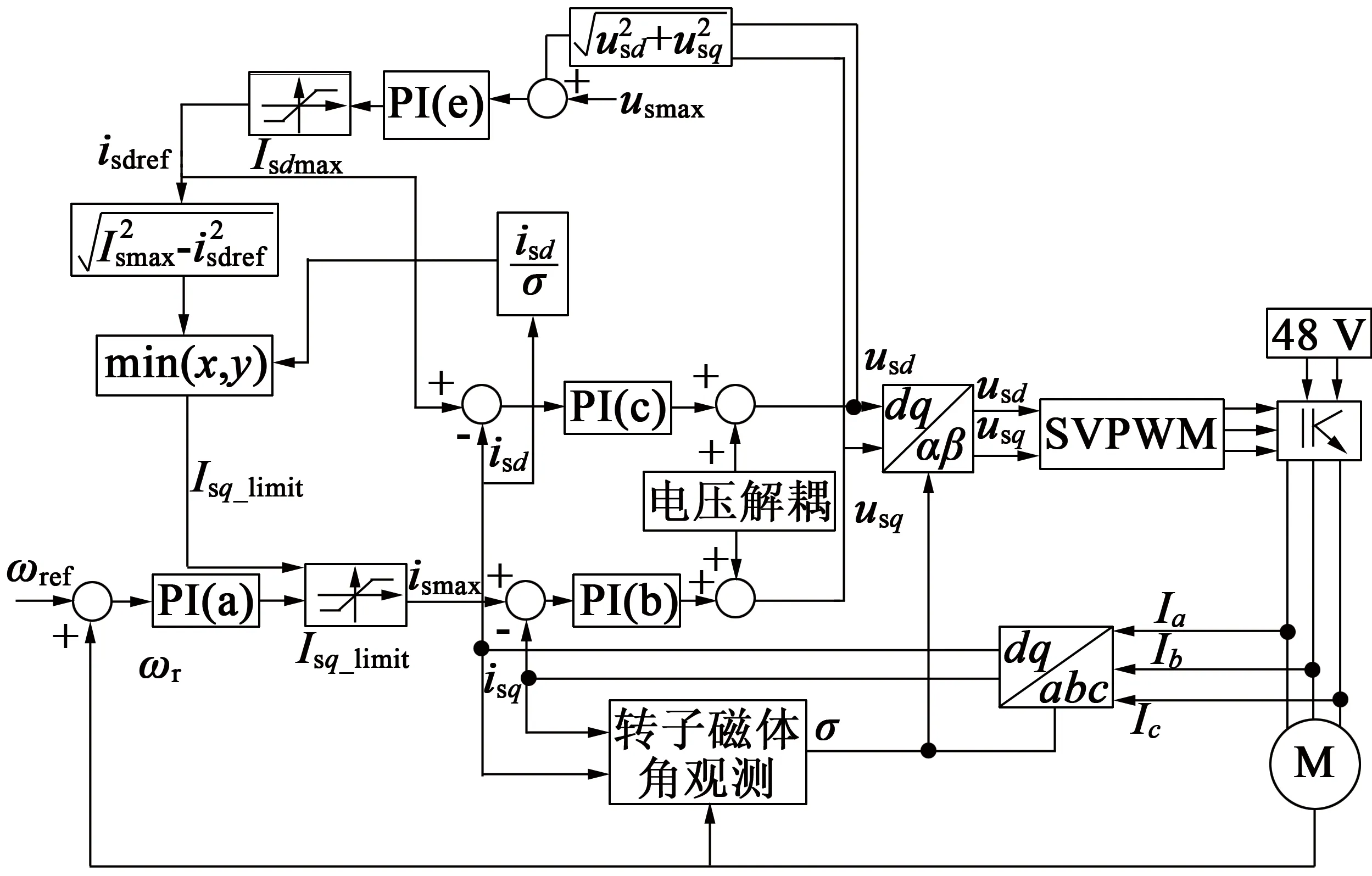
图6 本文采用的弱磁控制原理框图
(2)恒功率区,弱磁区1,随着转速的增加,电动机所需要的电压矢量越来越大,当ωs=ωbased时,电动机运行所需要的电压矢量将达到usmax。随着转速的再增加,电压矢量不可能超过usmax,因此调节器PI(e)将自动调节减小励磁电流isd,isd减小后,usq减小,isq将增加,usd同样将增加,进入电机弱磁控制状态。依次反复,由PI调节器自动调节isd。而isq可表示:
(3)电机速度再增加后,将进入恒电压区。该区域的电流分配策略:
通过以上的三点设计分析,整个电机运行过程中可以得到最大的转矩,系统不需要查表,参数依赖性小,系统鲁棒性强。
4 系统软件设计
系统主程序主要进行系统初始化和各个功能模块的初始化,主要完成速度给定和转矩给定控制,主程序下位机通过CAN总线与上位机进行通信,主程序流程图如图7所示。

图7 主程序流程图
4.1PWM定时器中断程序设计
主中断程序流程图如图8所示。中断程序中主要执行ADC模块,进行电压采样,同时依次完成Clarke变换,根据电机运行进行PID调节,然后Park变换以及SVPWM计算、磁场角度计算等。

图8 主中断程序流程图
4.2TZ故障保护程序设计
TMS320F28035有专门的故障保护端口,可以对故障信号进行中断保护。本文采用TZ2作为故障保护端口,当有故障信号时,TZ引脚变成低电平,DSP立即关断所有的PWM输出,同时发出报警信号。
4.3SVPWM的软件设计
SVPWM程序的编写流程图如图9和图10所示。它是整个软件设计的重点,如果产生的SVPWM波形不正确,系统将无法正常工作。

图9 SVPWM流程图

图10 ADC程序流程图
图10中PWM初始化主要完成PWM的产生方式的设置、PWM周期和占空比及PWM死区时间的设置等。
式中:TTBCLK为系统基准时钟周期,本文中设计值为0.01μs;TBPRD为周期寄存器。由于本文的MOSFET驱动芯片IR21363S在驱动时自带700ns的死区时间,因此本文在PWM模块中将死区时间设为0。
5 试 验
本文设计的控制器与电机连接,加载器采用磁粉加载器(型号CZ100),测试台如图11所示。实验时,加速踏板踩到最大,输出到控制器为最大电压5V。实验由三人协作完成,一人调恒流源给负载加载,一人负责用钳形表测交流电流以及直流母线电流,一人负责实验波形以及实验数据的记录。进行实验时,加速踏板踩到最大,控制器一直为最大加载状态,电动机加速到空载转速最高值,此时电动机带转矩转速传感器(型号NJ1)和磁粉加载器旋转,此时存在一定的负载转矩(有少量的剩磁,估计3~6N·m的转矩)。磁粉加载器加载电流为零。得到空载实验数据。再次实验时,加速踏板踩到极大值,保持控制器处于最大加载状态,增加磁粉加载器的加载电流,增加磁粉加载器的加载转矩,将转速拉低,测试不同转速时电机的转矩输出。测得转矩曲线如图12所示,实际测得的电流波形如图13所示。

图11 系统试验台实物图

图12 实际测得的转矩曲线

(a) f=1.7 Hz

(b) f=82 Hz
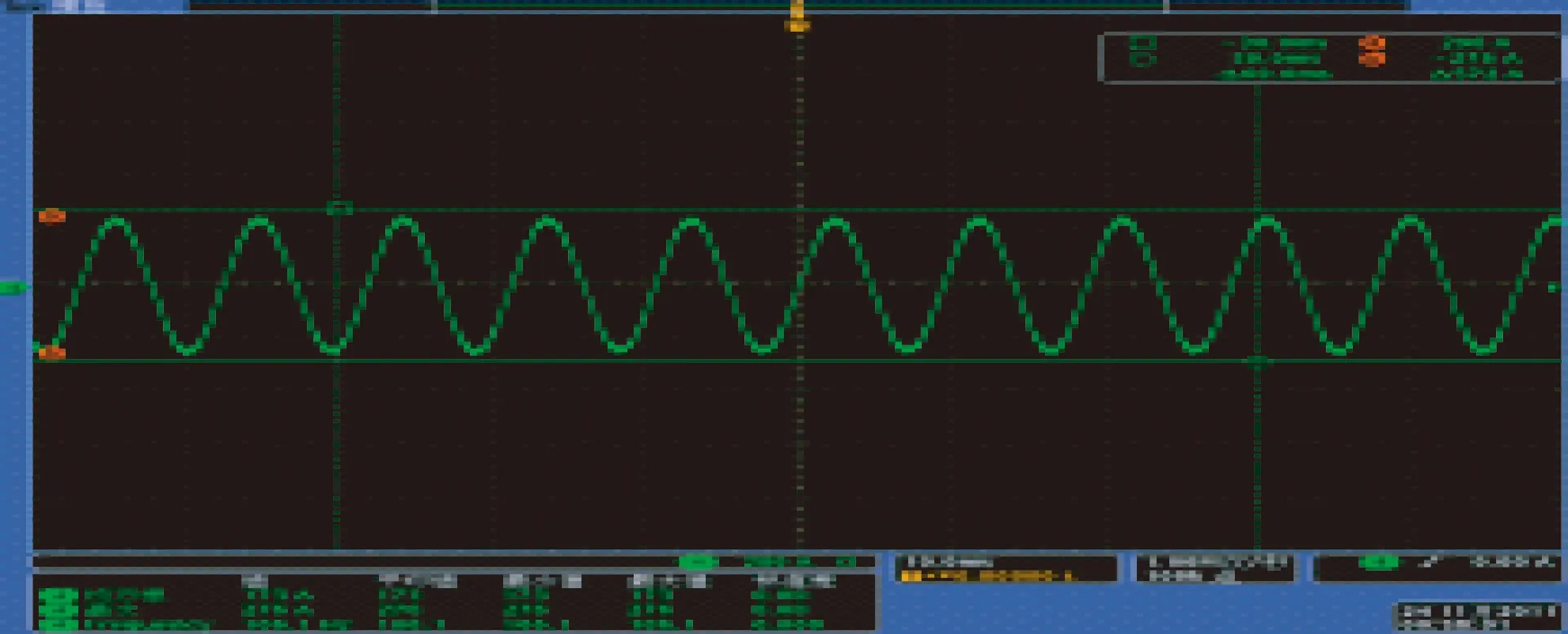
(c) f=105 Hz
6 结 语
从上面的实验结果可以看出,本文的控制器转矩输出良好,具有稳定的调速性能,可以实现在电动汽车运行过程中提供尽可能大的转矩和达到比较高的效率。符合电动汽车的控制需求。
[1] 汪贵平.纯电动汽车驱动与制动能量回收控制策略研究[D].西安:长安大学,2009.
[2] 黄万友.纯电动汽车动力总成系统匹配技术研究[D].济南:山东大学,2012.
[3] 张继红.纯电动汽车电液制动系统再生制动控制策略研究 [D].长春:吉林大学,2011.
[4] 赵俊华,文福拴,杨爱民,等.电动汽车对电力系统的影响及其调度与控制问题 [J].电力系统自动化,2011,35(14):2-8.
[5] 顾强.两档双离合器自动变速器的纯电动汽车传动系统协调控制技术研究 [D].长春:吉林大学,2012.
[6] 张超华.新型Z源逆变器研究[D].南京:南京航空航天大学,2009.
[7] 田立亭,史双龙,贾卓.电动汽车充电功率需求的统计学建模方法[J].电网技术,2010,34(11):126-130.
[8] 周嗣理.含光伏电源电动汽车充电站的设计与仿真研究 [D].合肥:安徽大学,2009.
Motor Control System of Pure Electric Vehicles Based on DSP and the Flux Weakening Control Algorithm
CHENQin1,2,WEILi-jun2,XIONGYi2
(1.Central South University, Changsha 410083, China;2.Hunan Railway Professional Technology College, Zhuzhou 412001,China)
A set of controller of pure electric vehicle motor and the rotor field oriented vector control system were designed. TMS320F28035 was taken as the system control core, and the low voltage motor with 48 V rated voltage was used for driving. In addition, the control algorithm of the whole system was improved, to improve the safety of the electric vehicle and electric vehicle in the running process can provide as large torque as possible and achieve high efficiency.
pure electric vehicle; motor; flux weakening control algorithm; efficiency optimization strategy
2015-11-04
湖南省教育厅科学研究青年项目(15B156)
TM343
A
1004-7018(2016)05-0048-04
陈庆(1980-),男,硕士,讲师,主要研究方向为电气自动化、自动化控制。
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
纺织科学研究(2020年1期)2020-05-21
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
制造技术与机床(2017年6期)2018-01-19
中学生数理化·高一版(2017年1期)2017-04-25
通信电源技术(2016年1期)2016-04-16
舰船科学技术(2015年8期)2015-02-27
中国塑料(2014年12期)2014-10-17
