基于LabVIEW的磁浮车气隙传感器测试系统设计*
2016-05-31 08:34靖永志张昆仑
传感器与微系统 2016年1期
关键词:现场可编程门阵列
何 飞, 靖永志, 张昆仑
(1.磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031; 2.西南交通大学 电气工程学院,四川 成都 610031)
基于LabVIEW的磁浮车气隙传感器测试系统设计*
何飞1,2, 靖永志1,2, 张昆仑1,2
(1.磁浮技术与磁浮列车教育部重点实验室,四川 成都 610031; 2.西南交通大学 电气工程学院,四川 成都 610031)
摘要:磁浮车气隙检测常采用电涡流传感器,其在0~20 mm量程范围内非线性严重,在实际工作时需要进行非线性校正,同时传感器工作环境恶劣,属于易损器件,需要经常检测维护。设计了一种气隙传感器测试系统,该系统以现场可编程门阵列(FPGA)作为控制核心,使用LabVIEW编写人机界面,实现了磁浮车气隙传感器输出特性的快速测试与在线校正。系统具有硬件结构简单、人机交互友好等特点。实验结果表明:该系统可方便监测传感器内部原始特性,经该系统校正后的传感器输出线性度良好,能满足磁浮列车悬浮控制系统要求。
关键词:磁浮车; 气隙传感器; 现场可编程门阵列; LabVIEW; 非线性校正
0引言
磁浮车作为一种新型的交通工具,具有能耗低、噪音小、安全、舒适、维护少等优点,是一种非常理想的陆路交通工具,有着广阔的应用前景[1]。气隙传感器是悬浮控制系统的重要组成部分,它将采集到的悬浮气隙大小变换为电信号,提供给悬浮控制系统,悬浮控制系统通过调整电磁铁线圈中的电流使轨道与悬浮电磁铁之间的气隙保持在10 mm左右[2]。气隙检测常采用调幅式电涡流传感器,其在0~20 mm量程范围内非线性严重,在实际工作时需要进行非线性校正。另外,传感器工作在高温、强磁场、振动大的环境中,出现故障的几率比较大,因而,研究气隙传感器测试系统是一项有价值的工作。现场可编程门阵列(FPGA)接口资源丰富,内部程序并行运行,处理能力强大,在实时性要求较高的测试系统中广泛应用。文献[3~5]基于LabVIEW搭建的虚拟仪器取得了很好的效果。本文利用FPGA的高速并行与自由可编程特性,结合LabVIEW便捷易于操作的仪器专用界面优点[6],设计了磁浮列车气隙传感器专用测试系统,经试验验证,该系统满足传感器特性研究与在线校正等工作需求,可以在后期维护中方便快速检测传感器特性,为传感器维护提供数据参考。
1系统构成
磁浮车气隙传感器测试系统如图1,虚线框内为气隙传感器。将气隙传感器固定于轨道上方,PC发出控制信号,经FPGA和步进电机驱动模块驱动步进电机,通过丝杠的传动,每步进一次,气隙传感器与轨道垂向相对运动0.1 mm,步进一次结束后启动A/D转换一次,采样一个12位数据送入FPGA,处理后的数据通过RS—232送入PC。

图1 气隙传感器测试系统结构图Fig 1 Structure of test system of gap sensor
其中,PC端采用LabVIEW编程搭建人机界面,通过RS—232通信实现对电机控制、传感器特性数据读取以及传感器校正数据的发送。
2FPGA模块
FPGA即现场可编程逻辑器件,它将半定制的门阵列电路的优点和可编程逻辑器件的用户可编程性结合在一起,使其不仅包含大量的门电路、速度快、功耗低,使设计的电子产品能够实现小型化、集成化和高可靠性,而且器件具有用户可编程特性,极大减少设计周期,降低设计费用,降低设计风险[7]。本系统所选用的FPGA是Xilinx 公司的Spartan—3AN系列的XC3S50AN芯片。如图2所示为FPGA模块框图。

图2 FPGA模块框图Fig 2 Block diagram of FPGA module
图2中,各子模块时钟信号均由FPGA分频产生。FPGA实现12位AD的控制、电机控制、校正以及串口通信等。
2.1校正模块
磁浮车气隙传感器通常采用电涡流式传感器,在实际使用中传感器输出与气隙大小并不是线性关系,或者仅在比较小的测量范围内呈现线性关系,悬浮控制系统要求气隙传感器在0~20 mm的范围内保持良好的线性度,因此,必须加入校正环节进行非线性校正。本系统采样查表的方式进行非线性校正,在FPGA内软件实现,其中校正参数来自于在线校正时,由上位机经串口发送的存入FPGA中的实际气隙值和传感器原始特性数据。只需对每一个输入查表得到一个相应的输出即可。
2.2数据打包和FIFO模块
对传感器进行在线校正时需要知道传感器原始特性曲线,而在线测试时需要校正后的线性数据,因此,需要将两组数据都发送给PC,如此可方便研究与工作两个阶段对传感器性能的了解,也为后期维护提供方便。数据打包模块用来将AD输出的12位原始数据和校正后的8位数据进行打包,考虑到校正后的8位数据最大为11001000(即200),提取12位原始数据的前4位作为一个新的字节的低4位,在该字节高4位填入1111,12位数据的低8位形成另一个字节,三个字节存入FIFO。FIFO是一个先入先出的存储器,这里采用同步FIFO,主要起数据缓冲的作用,从而防止数据传输过程中的丢失和重复读取。在ISE里可以通过IP Core很方便地定制各种FIFO。
2.3串行通信模块
串行通信模块用于PC与FPGA通信。考虑到RS—232协议简单,所需成本低,易于用FPGA实现的优点,另外测试时只需短距离通信,本系统采用RS—232协议通信。由于RS—232的电气特性与FPGA引脚不相同,因此,必须进行电平转换,本系统采用MAX3223芯片进行电平转换。串行通信模块包括以下三个子模块:波特率发生器、串口接收模块以及串口发送模块[8]。其中串口发送模块用来向PC发送AD输出的原始数据和校正后的数据,串口接收模块用来接收来自PC的控制信号和校正所需参数。
3LabVIEW模块
使用LabVIEW功能强大的图形编程语言能够提高编程效率[9]。PC使用 LabVIEW 作为开发平台在计算机串口和外设串口之间建立桥梁。本系统主要用到LabVIEW中仪器I/O的VISA库来读和写串口数据以及用文件I/O来进行数据的保存。LabVIEW基本处理流程如图3。
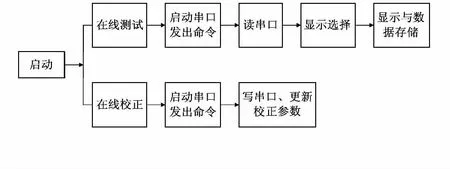
图3 LabVIEW基本设计流程Fig 3 Flow chart of basic design of LabVIEW
启动系统,选择文件路径 ,选择在线测试模式时,PC经串口发出命令,控制电机将传感器调至0 mm,再向上每0.1 mm测试一个数据至20 mm,把AD输出和校正后的数据发送给PC,选择需显示的波形将会显示传感器的原始特性曲线或校正后的特性曲线。选择在线校正模式时,在此模式下,PC依据所测AD输出和实际气隙值向FPGA写入校正数据。
4实验结果
为测试本系统的性能,点界面“在线测试”按钮,PC将通过RS—232下发命令,如图4所示LabVIEW人机界面接收到传感器内部12位A/D转换的原始特性数据并绘制在界面内,同时存储在相应文件中,由图可见传感器原始输出特性非线性明显,在实际气隙大于10 mm时,传感器输出特性曲线转为平缓。

图4 传感器原始特性曲线Fig 4 Original characteristic curve of sensor
经判定测试数据没有问题之后,点“在线校正”按钮,上位机通过串口将校正数据下发给传感器内部的FPGA更新校正参数。为验证校正校果,再启动“在线测试”程序,其测试结果如图5所示,图中0~20 mm全量程范围内传感器输入输出之间保持严格的线性关系,表明在线校正后的输出特性有明显的改善。
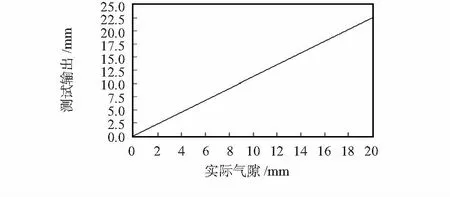
图5 校正后传感器特性曲线Fig 5 Corrected characteristic curve of sensor
5结论
本系统充分利用了LabVIEW和FPGA的强大功能,得到开发效率高、功能较完备、自动化程度高的测试系统,能较好地完成对磁浮车气隙传感器的在线测试和在线校正,达到了利于传感器研究、测试、维护的目的。在实际工作中,本系统可以用于磁浮车气隙传感器的标定、功能测试以及在线校正等。
参考文献:
[1]严陆光.关于积极发展我国磁浮交通的建议[J].电工电能新技术,2005,24(1):1-7.
[2]Jing Yongzhi,Xiao Jian,Zhang Kunlun.Compensation of gap sensor for high-speed maglev train with RBF neural network[J].Transactions of the Institute of Measurement and Control,2013,35(7):933-939.
[3]冯友宏,麻金继,杨凌云,等.基于物联网和LabVIEW 高效环境监测系统设计[J].传感器与微系统,2013,32(2):128-134.
[4]霍峰,王长松,巩宪锋,等.基于Zig Bee和LabVIEW的多功能数据采集系统[J].传感器与微系统,2008,27(7):82-85.
[5]程廷海,黄鹞,包钢,等.基于LabVIEW 的超声电机测试系统[J].传感器与微系统,2011,30(4):114-116.
[6]陈明星,朱灵,张龙,等.基于LabVIEW的光纤傅里叶变换光谱仪数据处理技术[J].仪器仪表学报,2010,31(3):488-492.
[7]郭永彩,苏渝维,高潮.基于FPGA的红外图像实时采集系统设计与实现[J].仪器仪表学报,2011,32(3):514-519.
[8]黄豪彩,杨灿军,陈道华,等.基于LabVIEW的深海气密采水器测控系统[J].仪器仪表学报,2011,32(1):40-45.
何飞(1990- ),男,湖北仙桃人,硕士研究生,主要从事磁浮列车、传感器技术研究。
靖永志,通讯作者,E—mail:jyzbenben@163.com。
Design of test system for maglev train gap sensor based on LabVIEW*
HE Fei1,2, JING Yong-zhi1,2, ZHANG Kun-lun1,2
(1.Key Laboratory of Magnetic Suspension Technology and Maglev Vehicle,Ministry of Education,Chengdu 610031,China; 2.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
Abstract:The eddy current sensor is employed to detect suspension gap in maglev train,and input-output characteristic of eddy current sensor is serious nonlinear when the gap range of 0~20 mm,so the sensor should be calibrated,and sensor works in harsh environment and thus it is vulnerable and inspection and maintenance is needed sure.A gap sensor test system is designed to monitor the sensor characteristic and calibrate the nonlinear error.The main control unit of this system is designed with FPGA and the man-machine interface is compiled by LabVIEW,fast test and online calibration of output characteristic of maglev train gap sensor are realized.It has many advantages such as simple hardware structure and friendly man-machine interface.The experimental results show that the system can monitor the original characteristic of the sensor conveniently,output linearity of sensor corrected by this system is good,and it can meet the requirement of suspension control system perfectly.
Key words:maglev train; gap sensor; FPGA; LabVIEW; nonlinear correction
作者简介:
中图分类号:TP 274.2
文献标识码:A
文章编号:1000—9787(2016)01—0085—03
*基金项目:国家自然科学基金资助项目(51377004)
收稿日期:2015—04—20
DOI:10.13873/J.1000—9787(2016)01—0085—03
猜你喜欢
江苏农业科学(2017年16期)2017-10-27
电脑知识与技术(2017年10期)2017-06-05
移动通信(2016年20期)2016-12-10
哈尔滨理工大学学报(2016年4期)2016-11-10
哈尔滨理工大学学报(2016年1期)2016-05-31
电脑知识与技术(2016年3期)2016-04-07
现代电子技术(2015年15期)2015-08-14
现代电子技术(2015年10期)2015-05-29
光学仪器(2014年5期)2014-11-18