舰用高精度激光陀螺惯导内杆臂误差分析及补偿方法研究
2016-08-17 06:04周冉辉
舰船科学技术 2016年4期
周冉辉
(海军装备部,北京 100841)
舰用高精度激光陀螺惯导内杆臂误差分析及补偿方法研究
周冉辉
(海军装备部,北京 100841)
对于高精度激光陀螺旋转惯导系统,大部分惯性器件误差都能够通过惯性测量单元(IMU)旋转而调制掉,内杆臂误差不仅不能够被调制掉,反而因为 IMU 旋转将误差引入到系统对准和导航过程中。基于此,本文对内杆臂误差进行分析与建模,推导内杆臂误差与导航速度误差之间的数学表达式,通过分析确定内杆臂长度和振动频率是影响内杆臂误差的2个因素,并提出基于内杆臂长度的误差补偿方法。最后,通过试验对内杆臂误差模型和补偿方法进行了验证。
激光陀螺;内杆臂误差;旋转惯导;误差补偿
0 引 言
近年来,随着激光陀螺技术和旋转调制技术的成熟和应用,国内高精度激光陀螺单轴旋转、双轴旋转惯导系统关键技术逐渐突破,完成了原理样机研发,并经过大量的实验室试验和跑车试验验证,达到了很高的精度水平[1-3]。如果继续提高系统性能,需要打破传统的惯导系统常见误差的补偿方式,因为这些误差大多都能够通过旋转调制掉,而应该将研究重点放在未被调制误差补偿和由于旋转额外引起的误差补偿上,IMU内杆臂误差就是一种。
如果将IMU视为刚体,在IMU运动过程中,它上面每个点的角速度都相同,所以理论上在IMU中3个陀螺的安装位置和方位可以任意,只要3个敏感轴之间不相互平行,经标定后均能实现IMU空间三维角速度测量。但由于3个加速度计物理尺寸和实际安装位置的限制,使得它们测量的是IMU不同点处的加速度,如果把这些加速度当作理想“点测量组件”的输出进行惯性导航解算,将引入导航误差,这种误差称为“内杆臂效应误差”[4-5]。在旋转惯导系统对准滤波器中,采取速度作为观测量,而如果IMU存在较大内杆臂,加上转位机构带动IMU不停的旋转,会对观测量带来较大的误差,影响对准精度。
本文针对高精度激光陀螺双轴旋转惯导系统,分析转位运动下IMU内杆臂误差及补偿的方法,并验证在惯导对准中的应用效果。
1 内杆臂误差建模
假设 IMU 中陀螺测量理想无误差,3个加速度计Ax,Ay,Az相对 IMU 固定不变,3个加速度计敏感轴相互垂直且延长线相交于 O 点,如图 1 所示。

图 1 加计内杆臂示意图Fig. 1 Diagrammatic sketch of acceleration inner-arm errors
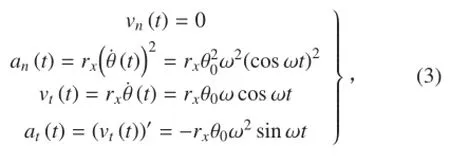
以加速度计 Ax为例进行分析,当 IMU 绕天向轴旋转时,假设天向轴与 OAz重合,Ax绕 O 点沿半径 rx作圆弧运动。考虑到沿天向轴旋转有启动、匀速旋转、停止3个运动模式,假设 OAx与 Ox 轴的夹角为正弦角振动形式,即


可求得加速度计 Ax处法向加速度向心加速度切向速度和切向加速度分别为:
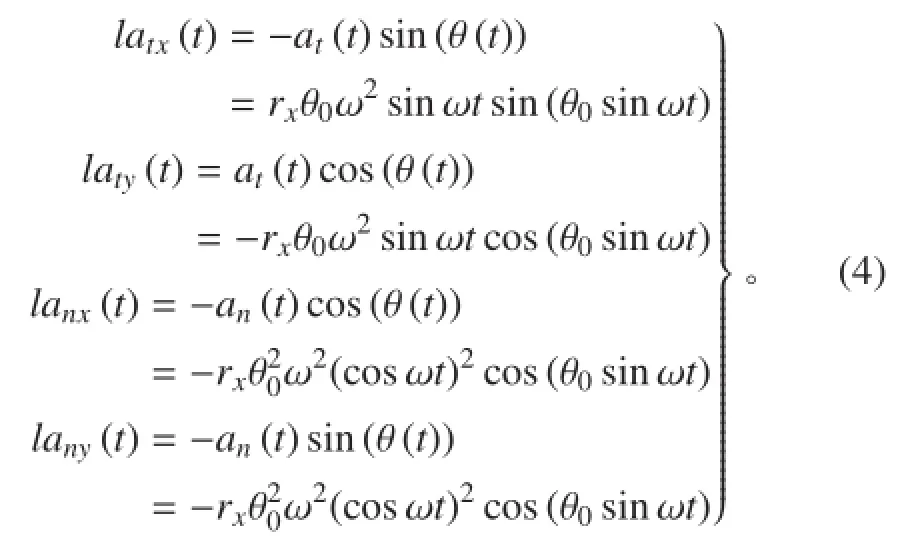

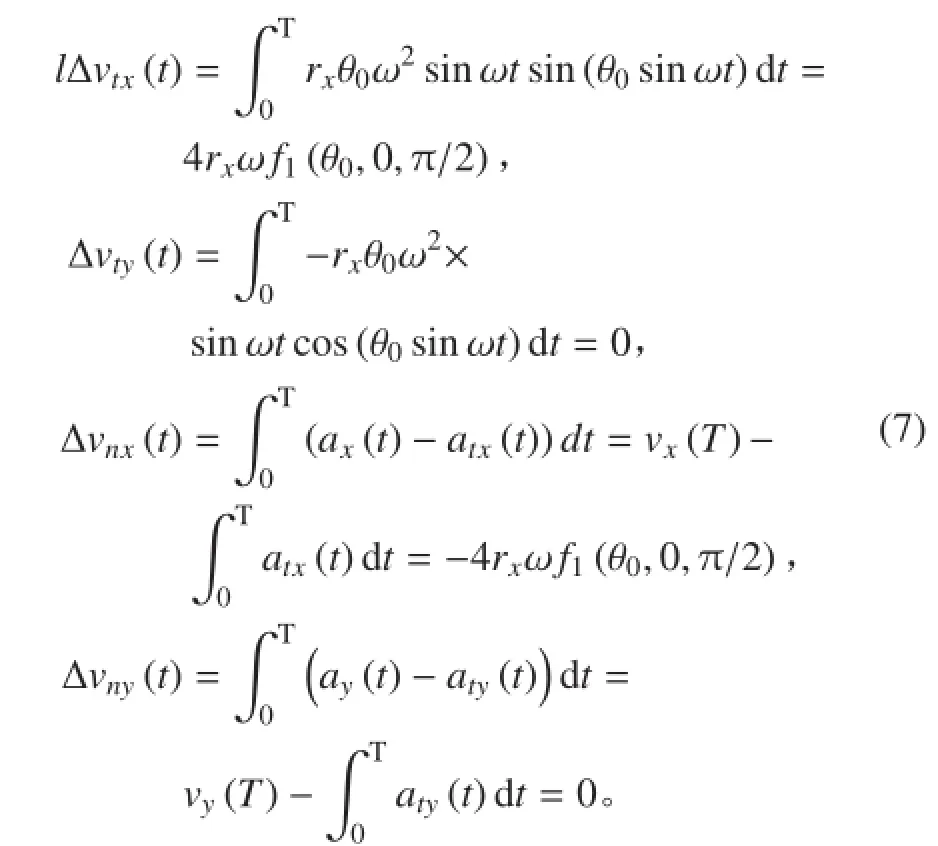
根据上式,将式(4)在 1 个周期内积分,可得沿坐标轴向的各速度增量为:
2 内杆臂误差分析
如果旋转轴与 OAz平行但不重合,即旋转中心与3个加速度计 Ax,Ay,Az的延长线不为同一点,如图 2所示。建立2个坐标系如下:1 个是 Oxyz 坐标系,3个轴分别与3个加速度计敏感轴重合,这里仍然假设3个加速度计敏感轴相互垂直且相交于一点;另 1 个是O'x'y'z',O' 为旋转中心,在平衡位置时它的3个轴与Oxyz 坐标系3个轴分别平行。
参照式(3)可得角振动在 Ax加速度计敏感处的向心加速度和切向加速度大小分别为:
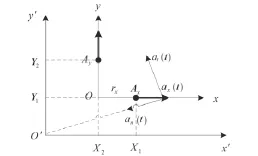
图 2 转轴与加计中心不重合下的内杆臂Fig. 2 Inner-arm on imbalance about core of rote-axis and acceleration

沿加速度计 Ax敏感轴向的加速度,测量值为:同理,可得加速度计 Ay的测量值为:


根据式(4)和式(7),将 ax(t)、ay(t) 沿着定坐标轴系分解(比如载体坐标系,初始时刻载体坐标系与 Oxyz 重合),再在 1 个振动周期内进行积分,得沿固定轴向导航速度增量:

由式(9)和式(10)可见,在 1 个振动周期内的导航速度增量与振动中心的位置无关,导航速度增量与加计敏感点的中心距离(称为“内杆臂长度”)、振动频率成正比。如果 IMU 中加计存在内杆臂,导航时仍然将加速度计当作点测量组件的输出来解算,将会造成解算误差。尤其是对于旋转惯导系统,如果加速度计内杆臂长度比较大,由于 IMU 按照转位方案不停作转停运动,且旋转速度较大,这将会引起严重的导航解算速度误差。
3 内杆臂误差补偿
通过上面的分析可知,内杆臂引起的速度误差与旋转中心无关,而与内杆臂长度和振动频率有关。如果能够将内杆臂长度计算出来并补偿掉,将不会存在此项误差。内杆臂长度通过直接测量、根据导航解算速度漂移律辨识及转台测量加计输出在不同角速度下的漂移来标定3种方法获得。
内杆臂误差补偿的基本思想是将加速度计敏感点处的加速度测量折算至3个加速度计敏感轴交点 O上。以加速度计 Ax为例,设 IMU 的角速度矢量为ω,则 Ax点处加速度矢量 ax与 O 点加速度矢量 ao之间的关系为:

由于加速度计 Ax只敏感沿法向加速度,将式(11)在 O xb轴投影得加速度计 Ax测量输出为,移项后便得 aox的计算公式。同理,可得加速度计 Ay、Az测量输出折算到 O 点的计算公式为:

将式(12)写成矢量形式为:

式(13)即为内杆臂误差补偿的计算公式,经补偿后若将 O 点视为加计测量输出点,则从原理上不会再造成任何内杆臂效应误差。
实际系统中3个加计敏感轴往往不相交于一点,则在加速度的折算过程中必然与角速度的导数关联,这对角速率或角增量输出的陀螺来说,求导对实际导航解算的影响不利。通常在设计 IMU 时对加计的安装都有一定的位置和方位要求。
4 试验验证
为验证本文对内杆臂误差建模的正确性和补偿方法的有效性,利用某型激光陀螺 IMU(陀螺精度大约为 0.004°/h)进行静态试验验证。试验流程如下:1)进入初始对准工作模式,共 10 min,其中粗对准 4 min,闭环精对准 6 min,粗对准方案和精对准方案分别采用文献[6]和文献[7]中的卡尔曼滤波闭环对准方案,不同的是在对准方案中增加了内杆臂误差的补偿。2)转入自主纯惯性导航工作模式。图 3 是闭环精对准的航向角曲线,精对准 2 min后航向角收敛在 2′的振荡范围内。图 4 是导航 3.5 h 的速度误差和位置误差曲线,速度误差最大值 0.3 m/s,位置误差最大值 0.5 nm/3.5 h。说明经过内杆臂误差补偿后,惯导系统初始对准航向角能够快速收敛,达到较高的导航精度。
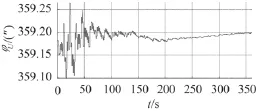
图 3 闭环卡尔曼滤波精对准航向角曲线Fig. 3 The curve of yaw for kalman filter closed alignment
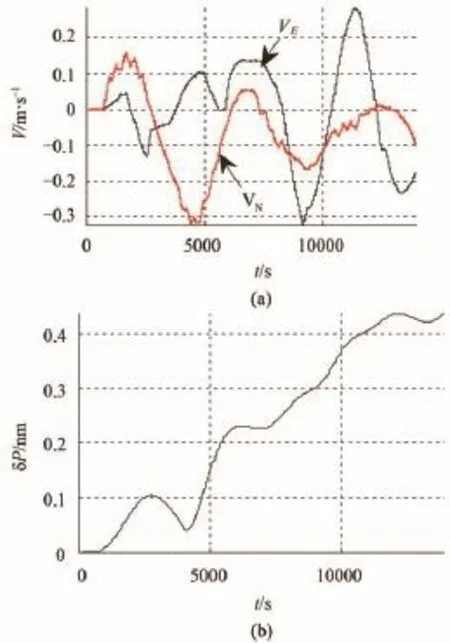
图 4 导航 3.5 h 速度和位置误差曲线Fig. 4 The curve of 3.5 hours' navigation velocity errors and position errors
5 结 语
本文对激光陀螺 IMU 内杆臂误差进行分析、建模,研究了误差补偿的方法,得到以下结论:
1)内杆臂误差体现在 IMU 运动过程中,尤其对于旋转惯导系统影响较大。
2)如果不对内杆臂误差进行补偿,该误差将随着 IMU旋转而引入惯导系统初始对准误差和导航误差中。
3)利用已测量的内杆臂长度,对内杆臂误差进行补偿,能够有效减小内杆臂误差对惯导系统精度的影响。
本文对惯性测量单元内杆臂误差的建模与补偿可以应用于舰用高精度激光陀螺旋转惯导系统方案设计中。
[1]袁保伦. 四频激光陀螺旋转式惯导系统研究[D]. 长沙: 国防科学技术大学, 2007. YUAN Bao-lun. Research on rotating inertial navigation system with four-frequency differential laser gyroscope[D]. Changsha: National University of Defense Technology, 2007.
[2]张宇飞, 陆权聪, 翁海娜. 基于IMU旋转的船用激光导航系统分析与设计[J]. 海洋技术, 2009, 28(2): 88–91. ZHANG Yu-fei, LU Quan-cong, WENG Hai-na. Analysis and design of marine RLG navigation system base on IMU rotation[J]. Ocean Technology, 2009, 28(2): 88–91.
[3]陆志东, 王晓斌. 系统级双轴旋转调制捷联惯导误差分析及标校[J]. 中国惯性技术学报, 2010, 18(2): 135–141. LU Zhi-dong, WANG Xiao-bin. Error analysis and calibration of systematic dual-axis rotation-modulating SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 135–141.
[4]严恭敏, 严卫生, 徐徳民. 捷联惯性测量组件中内杆臂效应分析与补偿[J]. 中国惯性技术学报, 2008, 16(2): 148–153. YAN Gong-min, YAN Wei-sheng, XU De-min. Analysis and compensation on inner lever arm effect of strapdown inertial measurement unit[J]. Journal of Chinese Inertial Technology,2008, 16(2): 148–153.
[5]徐晓苏, 万德钧. 舰载捷联惯性系统中杆臂效应误差的研究[J]. 东南大学学报, 1994, 24(2): 122–126. XU Xiao-su, WAN De-jun. A study on dimension effect error of strapdown inertial system[J]. Journal of Southeast University,1994, 24(2): 122–126.
[6]葛孚宁, 尹洪亮. 激光惯导系统凝固坐标系粗对准方法[J]. 舰船科学技术, 2014, 36(6): 121–124. GE Fu-ning, YIN Hong-liang. Research on coarse alignment method based on the solidification coordinates of ring laser gyro inertial navigation system[J]. Ship Science and Technology,2014, 36(6): 121–124.
[7]徐秦, 张滨, 尹洪亮. 舰用激光陀螺双轴旋转惯导系统闭环对准方法[J]. 舰船科学技术, 2013, 35(11): 118–122. XU Qin, ZHANG Bin, YIN Hong-liang. Research on closedloop alignment method for ship's two-axis rotating laser gyro inertial navigation system[J]. Ship Science and Technology, 2013,35(11): 118–122.
Rotating scheme designing for two-axis rotating laser gyro inertial navigation system
ZHOU Ran-hui (Navy Armament Department of PLA, Beijing 100841, China)
For high-precision rotary laser gyro inertial navigation systems (RINS), inertial instruments errors are most able Inertial Measurement Unit (IMU) rotating modulation off, an error in the arm not only can't be modulated out, but because the error introduced into the IMU rotation system registration and navigation. Based on this, the internal lever arm error analysis and modeling, detailed pushed to the mathematical expression in the lever arm and the navigation error speed error between. Through analysis identified within the lever arm length and frequency of vibration are two factors that affect the inner lever arm error, and error compensation method is proposed based on internal lever arm length. Finally, within the experimental error of the lever arm model and compensation methods of this study were verified.
laser gyro;inner-arm error;RINS;error compensation
U 666.1
A
1672 – 7619(2016)04 – 0120 – 04
10.3404/j.issn.1672 – 7619.2016.04.024
2015 – 12 – 02
周冉辉(1978 – ),男,工程师,从事艇总体技术研究。
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
空间电子技术(2021年4期)2021-11-10
数字海洋与水下攻防(2020年5期)2021-01-04
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20