基于分层结构的智能车系统架构
2016-09-22 02:54李明喜黄向东刘志峰
军事交通学院学报 2016年6期
袁 一,李明喜,黄向东,刘志峰
(1.军事交通学院 军用车辆系,天津 300161; 2.广州汽车集团股份有限公司,广州 511400)
● 车辆工程Vehicle Engineering
基于分层结构的智能车系统架构
袁一1,李明喜1,黄向东2,刘志峰2
(1.军事交通学院 军用车辆系,天津 300161; 2.广州汽车集团股份有限公司,广州 511400)
为研究国内外智能车系统架构,分析了国外典型智能车的系统架构及其优缺点。对军事交通学院的智能车软硬件系统架构进行介绍,利用分层技术对智能车硬件系统和软件系统分层结构的物理与逻辑关系进行设计,使其具备良好的容错性和可伸缩性,并在实际实施中得到良好的验证。
分层结构;智能车;系统架构
系统架构是智能车辆的感知、决策、控制等功能模块的物理设备与软件模块之间的逻辑结构与内在联系的组织与构成方式。智能车需要强大的环境感知能力、信息处理能力和实时决策与控制能力,这些能力是由多种复杂的硬件群和软件群共同组成和实现的。这些硬件群和软件群的逻辑结构与组织方式的优劣将在很大程度上决定智能车辆的功能实现和性能的优劣(如可靠性、可扩展性、可移植性等)。随着硬件(如传感器、计算机等)和软件技术(如人工智能技术)等的不断发展,智能车辆的系统架构也在不断地发展和进步。
1 国外典型智能车系统架构
在智能车技术的研究方面,国外起步较早,典型的研究代表如美国卡耐基梅隆大学NavLab系列智能车、美国斯坦福大学智能车、意大利帕尔马大学The ARGO vehicle智能车、谷歌公司的Google Driverless Car等。
1.1卡耐基梅隆大学BOSS智能车系统架构
卡耐基梅隆大学的机器人研究所研发的NavLab系列智能车,早在1995年6月便进行了穿越美国的实验,行程4 587 km,其中自主驾驶部分占98.2%,最长自主驾驶距离为111 km,全程平均速度为102.72 km/h[1],在2007年美国举行的智能车挑战赛中取得了冠军。
图1为Boss智能车系统架构示意图,该系统架构基于自动驾驶的任务被划分成5大模块[2]。

图1 Boss智能车系统架构
机械电子模块:是智能车的硬件组成,机械设计和电子设计是实现无人驾驶的基础。
任务规划模块:主要功能是根据路网文件(RNDF)所提供的知识信息来估算智能车所承担的时间成本和风险成本,并且计算出车辆要到达的下一个检测点,这些信息还会包含车辆所选择行驶路径的交通拥堵状况、限速情况等。
行为决策模块:是通过状态机的方法实现的,它首先将智能车自主驾驶任务分解成一系列的自主驾驶行为(比如车辆跟随行驶、换道行驶、路口行驶、自主停车等),然后根据车辆当前的行驶状态通过状态机来触发不同的驾驶行为。
动作执行模块:即车辆运动的控制,车辆驾驶行为的实现最终表现为车辆运动的控制,主要包括车辆运动姿势的调整与控制、对障碍物的处理等。
环境感知与空间建模:该模块通过对多种传感器(GPS、雷达、相机等)的信息进行融合处理,对车辆行驶的道路环境进行三维重构,为其他模块的运行提供信息参考。
1.2斯坦福大学智能车系统架构
2005年,斯坦福大学的Stanley智能车在美国智能车挑战赛中取得了第1名;2007年,斯坦福大学的Junior智能车在城市挑战赛中摘取了第2名[3]。该智能车系统由大约30个并行执行的模块构成。系统分为6层,分别为传感器接口层、环境感知层、决策控制层、车辆接口层、用户界面层与全局服务层[4](如图2所示)。
传感器接口层:包含一系列传感器信息接收模块。这个模块与标记所有传感器数据的接收和时间有关,还包含一个具有道路坐标信息的数据库服务器(RDDF文件)。
环境感知层:将传感器数据映射到内部模型上。这一层的基本模型是基于Kalman滤波的车辆状态检测器,可以计算出车辆的坐标、方向和速度。基于激光、相机和雷达系统的3种不同的映射模块建立出二维环境地图,寻路模块用激光源地图检测道路的边界,使车辆可以通过横向控制保持在道路中央。最后,路面评估模块通过提取当前路面的相关参数以确定车辆行驶的安全速度。
决策控制层:负责调节车辆的转向、油门和刹车。路径规划模块确定车辆的行驶轨迹,传递给两个闭环轨迹跟踪控制器,一个用于转向控制,一个用于刹车和油门控制。这两个控制器都将控制命令发送到执行机构用于驾驶动作的执行。控制层有一个高级控制模块,作为一个简单的有限状态自动机,这一层根据接收到的用户指令决定车辆行驶的基本模式,指令来自车载触屏或者紧急停车摇控装置。
车辆接口层:作为智能车线控系统的接口,它包括通向车辆刹车、油门和转向轮的所有接口以及车辆许多系统的电源接口。
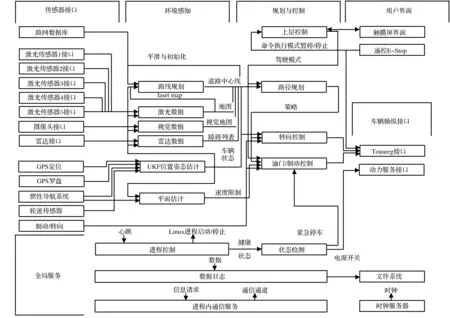
图2 斯坦幅大学Junior智能车系统架构
用户界面:用户界面包括远程紧急停车和远程启动的触摸屏模块。
全局服务层:全局服务层提供所有软件模块的基本服务。通信服务由卡耐基梅隆大学的进程间通信工具包提供。参数服务器维持一个包含所有车辆参数的数据库并以标准的协议更新所属车辆。系统异常检测模块监控所有系统组件的运行状况并在必要时重新启动个别子系统。时钟的同步通过时间服务器实现。数据日志服务器时时记录传感、控制和诊断数据以便回顾和分析。
1.3国外智能车系统架构分析
(1)研究机构对智能车的架构问题是作为关键技术进行重点研究的,均以模块功能为重点划分结构单元,这样的架构设计对智能车的各个技术领域的任务分工建立了明确的边界,有效地保证了各个任务单元的独立性,对于整体项目的组织实施带来了便利[3-4]。
(2)架构均建立了感知、决策、控制、车辆、用户界面等基本子系统单元,斯坦福大学的智能车架构中还增加了全球服务层,用以满足系统的运行检测和数据日志记录功能[5-6]。
上述的智能车在比赛中的成绩证明了他们的系统架构是能够满足智能车设计的需要,但是这些架构仍然存在着一些不足:一是架构设计过于宏观。上述架构虽能呈现智能车系统架构的主要方面,但是对子系统间的联系并没有给出明确的定义,架构设计图很难与具体的模块实现相互映射,必然造成系统接口的混乱和冗余[7]。二是系统硬件技术滞后。智能车的传感器技术是一个高速发展的领域,传感器技术的性能直接影响系统的架构特征,上述智能车采用的传感器严重超出车辆外部尺寸限制要求,对车辆的外形造成明显的影响。
2 军事交通学院智能车的系统架构
军事交通学院的智能车(下称“军交智能车”)已经研发到第五代[1],系统架构经过多次测试和调整,能够较好地适应结构化的道路环境,图3为采用该系统架构的猛狮号智能车硬件架构。

图3 军交智能车硬件架构
2.1硬件架构
军交智能车的硬件架构中,硬件平台可以分为底层、交换层、感知层、计算层。其中底层指智能车平台的执行机构驱动控制层,包括转向驱动、油门驱动、挡位、制动驱动、信号灯驱动、汽车相关附件的驱动(如雨刮、喇叭等控制)。
2.1.1智能车底层硬件设计
军交智能车底层驱动电路包括3种控制电路:执行机构控制电路(包括转向控制电路、油门控制电路、抽动控制电路)、灯光音响等信号控制电路和电源及中央控制管理电路。
中央控制管理电路相当于智能车的小脑,它能够独立控制智能车辆其他系统的能源,实现对2台工控机、64线雷达、GPS/惯导、毫米波雷达、四线雷达、一线雷达等车载传感器的电源控制,并保证在上位机系统失效时使智能车能够安全停止。该电路的可靠性很高,功耗极低,始终处于工作状态。
执行机构控制电路分别实现线控转向、线控油门和线控制动控制。线控转向电路可以接收CAN总线的角度位置和转向速度的指令,实现转向盘位置的实时控制;油门控制电路能够以4096级的精度对发动机的油门开度进行精确调节;制动电路通过PWM调压方式对液压马达转速控制,实现了制动由缓到急的多级控制效果,同时检测液压制动回路制动油压作为反馈信息。
信号控制电路实现大灯、转向灯、制动灯、雨刮及喷水、喇叭的控制。
2.1.2智能车感知系统设计
军交智能车的感知系统,针对越野道路环境的要求,以三维激光雷达作为主要的感知手段,辅助以4线激光雷达和一线激光雷达,同时以GPS、北斗、GNSS卫星接收仪器作为定位装置,提供3~5 m精度的位置信息,实现了越野道路环境的初步感知(如图4所示)。军交智能车传感器系统的配置和感知能力描述见表1。

图4 军交智能车的传感器安装与感知范围
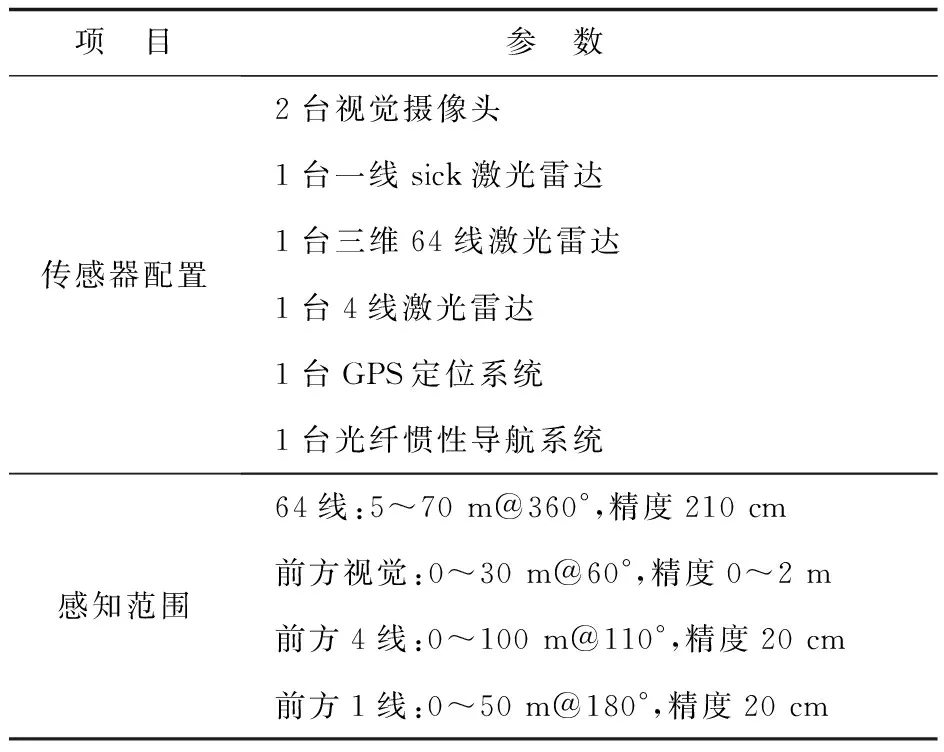
项 目参 数 传感器配置2台视觉摄像头1台一线sick激光雷达1台三维64线激光雷达1台4线激光雷达1台GPS定位系统1台光纤惯性导航系统感知范围64线:5~70m@360°,精度210cm前方视觉:0~30m@60°,精度0~2m前方4线:0~100m@110°,精度20cm前方1线:0~50m@180°,精度20cm
2.1.3智能车计算与网络平台
军交智能车采用2台core i5的工控机作为计算平台,计算机具有4 G内存,128 G硬盘,2个千兆网口,4个串口,2个485接口,2个CAN接口,4个1394接口。2台计算机之间,以及计算机与传感器之间通过千兆交换机实现数据交换。计算机与底层控制系统通过CAN总线进行数据交换。
2.2软件架构
军交系列智能车软件系统根据分层、隔离、模块化的设计思路,将整个系统分解为传感器层、感知层、规划与决策、控制层、人机交互层、公共层、执行层(如图5所示)。

图5 军交智能车系统架构
传感器层:由雷达传感器、视觉传感器、GPS、车身传感器等组成,主要完成采集传感器数据任务。其中为实现传感器即插即用,需要规范各类传感器的标准数据格式。这一层将采集到的传感器数据送入感知模块处理。
感知层:主要完成分析传感器数据,实现道路边界检测、障碍检测、交通标识检测、车身状态估计等,为智能车规划决策做准备。
规划与决策:主要完成路径规划和导航。通过分析从感知模块得到的环境数据和自身数据,在精细电子地图上确定车辆位置,并根据目标点坐标生成行驶轨迹,决策出智能车的驾驶模式。
控制层:依据轨迹数据和当前车辆状态,控制车辆按轨迹行驶。同时,接收人为干预指令,进行加减速和转向操作。该层直接将控制指令输出至车辆的油门、制动和转向控制器。
人机交互层:接收驾驶员的触摸指令和紧急制动指令,输出至控制层。同时,也可以通过声音和图像反馈环境和车辆自身信息,供驾驶员参考。
公共层:为以上各层服务,包括数据通信、数据记录、地图文件读写等。
执行层:直接关联车辆的电控模块,接收控制指令,完成驾驶动作,如加减油门、电动转向操作、电源控制等。
2.3军交智能车系统架构分析
军交智能车的架构设计自2009年开始至今,共经历了五代的改进和完善,并在10台以上不同类型的智能车平台上得到实现。
(1)系统架构明确地划分为2个部分:硬件部分和软件部分。这样的划分方法,目的在于实现软件的平台无关性,保证系统软件能够适应不同硬件配置的要求,从而降低开发成本并降低调试时间。
(2)系统采用分层结构思想,将系统分为7大子系统层:传感器层、感知层、规划与决策层、控制层、人机交互层、公共层和执行层。层与层之间相互关联并相互通信,具有完善的反馈机制,定义了用于信号交换的完备的信号流图。
(3)系统在架构级别定义了各系统的心跳检测机制,用以反映各个子系统的运行状态,在决策层完成智能驾驶系统的状态检测和故障判断。该机制是军交智能车在实际实现中保证系统可靠性和稳定性的重要创新点,在系统的调试和开发过程中发挥了重要作用。
3 结 语
合理的系统架构是确保智能车实现其功能的基础,军事交通学院智能车所采用的系统架构在国内多次比赛中均表现出较为明显的优势[1]:一是系统具备较好的可靠性和稳定性;二是系统具备可伸缩性,能够根据不同的任务要求,进行合理的裁剪和调整;三是系统使冗余和备份得到合理的结合,在降低系统耦合性的同时,实现了系统自备份和和可靠性保证。目前,军事交通学院智能车架构更多地针对三维激光传感器进行优化设计,而针对低成本传感器方面尚未进行系统优化,试验还不够充分,这是以后需要研究的重要工作。
[1]徐友春, 王荣本, 李兵,等. 世界智能车辆近况综述[J].汽车工程, 2001,23(5):289-295.
[2]HERMANCE D,SASAKI S. Hybrid electric vehicles take to the Street[J]. IEEE Spectrum, 1999, 162(3): 387-401.
[3]POWELL B K, BAILEY K E, CIKANEK S R. Dynamic modeling and control of hybrid electric vehicle powertrain system[J]. Control Systems Magazine IEEE, 1998, 142(3): 32-40.
[4]YOU F, WANG R B, ZHANG R H. Algorithm on Lane Changing and Tracking Control Technology for Intelligent Vehicle[C]. Sanya: Proceedings of the 2007 IEEE International Conference on Robot Smart Tech, 2007:1888-1893.
[5]BABER J , KELODKO J, NOEL T.Cooperative autonomous driving intelligent vehicles sharing city roads[J]. IEEE Robotics &Automation Magazine, 2005, 12(1):44-49.
[6]MARTA C Mora, RIEARDO P T. Multi-obstacle tracking and path planning for intelligent vehicles[J]. Turkey: Proceedings of the 2007 IEEE Intelligent Vehicles, 2007:172-177.
[7]MICHEL P C Q,MARY P. Navel self organizing fuzzy neural rule based pilot system for automated vehicles[J]. Neural Networks, 2001, 1(14):1099-1112.
(编辑:史海英)
Hierarchy-Based Architecture of Intelligent Vehicle System
YUAN Yi1,LI MingXi1,HUANG XiangDong2,LIU ZhiFeng2
(1.Military Vehicle Department, Military Transportation University, Tianjin 300161, China;2.Guangzhou Automobile Group Co., Ltd., Guangzhou 511400, China)
To obtain an overall view of the architecture of the intelligent vehicle system, this paper, with an analysis of its advantages and disadvantages, reviews the architecture of the typical intelligent vehicle systems in other countries. Then, the software and the hardware architecture of the intelligent vehicle developed by Military Transporation University is introduced. It is verified that the fault tolerance and scalability of the intelligent vehicle are improved by using hierarchical technology in the design of its hardware and software system hierarchy physical and logical relations.
hierarchy; intelligent vehicle; system architecture
2015-02-10;
2016-04-20.
广州市市级科技计划项目(2014Y2-00013).
袁一(1963—),男,硕士,副教授.
10.16807/j.cnki.12-1372/e.2016.06.009
TP242.6
A
1674-2192(2016)06- 0037- 06
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
纺织科学研究(2021年1期)2021-12-03
汽车工程(2021年12期)2021-03-08
电子制作(2019年22期)2020-01-14
当代陕西(2019年16期)2019-09-25
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年9期)2018-08-04
小太阳画报(2018年3期)2018-05-14
阅读与作文(小学低年级版)(2016年12期)2016-12-22
互联网天地(2016年1期)2016-05-04