
一种基于差分进化机理的船舶方位估计方法
2016-10-12 03:25王荣杰詹宜巨周海峰陈美谦
中国航海 2016年2期
王荣杰, 詹宜巨, 周海峰, 陈美谦
(1.集美大学 轮机工程学院,福建 厦门 361021; 2.中山大学 工学院,广州 510006;3.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
WANG Rongjie1,3, ZHAN Yiju2, ZHOU Haifeng1, CHEN Meiqian1
一种基于差分进化机理的船舶方位估计方法
王荣杰1,3, 詹宜巨2, 周海峰1, 陈美谦1
(1.集美大学 轮机工程学院,福建 厦门 361021; 2.中山大学 工学院,广州 510006;3.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
针对船舶定位,提出一种基于差分进化机理的目标方位估计方法。首先,将多变异策略和优劣淘汰制引入到差分进化算法中;其次,用新的差分进化机理优化估计波达方位的似然目标函数,从而达到估计目标船舶方位的目的;最后,进行源信号服从正则分布、非正则分布和混合类型的仿真试验。试验结果表明:该方法不仅能有效估计目标船舶的波达方位,而且对噪声具有比其他传统方法更好的鲁棒性。
船舶工程;差分进化机理;波达方位;变异;最大似然
WANGRongjie1,3,ZHANYiju2,ZHOUHaifeng1,CHENMeiqian1
Abstract: A target bearing estimation method based on the differential evolution mechanism is introduced for a ship to determine the position of a target. The multi-mutation strategy and discarding mechanism are integrated into the differential evolution algorithm. The maximum-likelihood estimation of the Direction Of Arrival(DOA) of target-ships is achieved with the improved differential evolution algorithm. Simulation results prove that the proposed method is of better robustness than the conventional methods.
Keywords: ship engineering; differential evolution mechanism; DOA; mutation; maximum likelihood
船舶是海上交通的一种重要载体,由于海洋环境复杂、气候多变,船舶的安全运行不可避免地会受到影响,甚至会因其自身受到损伤而造成海损事故。海损事故一旦发生,船舶的方位信息将为安全保障部门作出准确的维护或搜救决策提供至关重要的科学支持;此外,船舶方位信息更是海上智能交通自动定位识别和船舶避碰系统为保证船舶安全航行而作出决策的重要依据。信号处理领域中的波达方位(Direction Of Arrival,DOA)估计[1]是一种广泛应用于雷达、声呐、导弹制导和无线通信系统等领域中的目标方位估计方法,其原理是通过对天线阵列接收的信号进行分析得到目标源的方位。现有的DOA估计方法主要分为多重信号分类(Multiple Signal Classification,MUSIC)法[2-3]、旋转不变技术[4-5](Estimating Signal Parameter via Rotational Invariance Techniques,ESPRIT)和最大似然估计法等3类。
1)MUSIC对噪声具有很好的鲁棒性,但其要求接收信号的快拍数足够多,且估计精度与待定位目标源之间的方位差互相制约。
2)ESPRIT技术能适用于方位差较大的情况,但其不仅对噪声抑制能力差,而且同样要求信号的快拍数足够多。
3)最大似然估计是一种具有优秀统计特性和鲁棒性的技术[6],理论上已证明运用该方法可得到最优的目标DOA方位。
与子空间分解的MUSIC法和ESPRIT法相比,基于最大似然的DOA估计法的估计精度不仅不受快拍数的约束,而且在阈值区域内的渐近性较好。然而,似然函数是一个非线性的多模函数,对其进行优化较为困难。对此,提出利用基于差分进化机理来求解最大似然函数,进而将其应用到目标船舶方位估计中。
1 问题描述
等距线阵与波达方位见图1,其中:m和d分别为阵元数和阵元间距;接收阵列位于n艘船舶位置的远场区,且m≥n。假设n艘目标船舶发送的源信号s(t)=[s1(t),s2(t), …,sn(t)]T为彼此独立且均值为0的窄带信号,并记其到达第1个阵元直射线时与阵列法线间的夹角为θi(i=1,2,…,n),称该夹角为波达方位(角),即DOA方位。
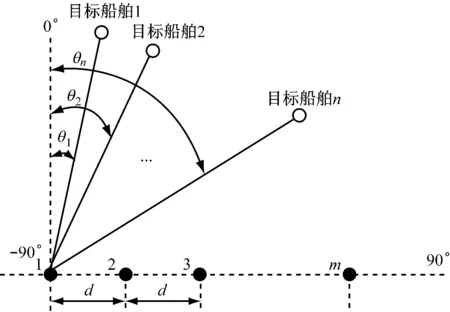
图1 等距线阵与波达方位
若将第1个阵元视为参考阵列,则目标源到达非参考阵元都会存在延迟,即非参考阵元接收到的信号与目标源信号间存在一个相位差。记第i个目标源到达第2个阵元引起的相位差为ωi,则ωi与θi间的关系为

(1)

ai=[1,e-jωi,e-j2ωi,…,e-j(m-1)ωi]T
(2)

A=[a1,a2,…,an]=
(3)
式(3)中:A为m×n维Vandermonde矩阵,Rank(A)=n。若将m个阵元接收到的信号记为x(t)=[x1(t),x2(t),…,xm(t)]T,则x(t)与s(t)的关系为
x(t)=As(t)+η(t)
(4)
式(4)中:η(t)为互相独立的复值高斯白噪声干扰信号。依据文献[7]定义的峰度概念,可将复值的信号界分为服从超高斯、高斯和亚高斯分布的正则或非正则信号,源信号si(t)(i=1,2, …,n)为服从超高斯或亚高斯分布的正则或非正则复值信号。目标船舶DOA方位估计所要解决的问题是在源信号s(t)和接收阵列的混叠参数A未知的情况下,仅根据源信号的独立统计特性,从观测到的混叠信号x(t)中估算出各艘目标船舶相对于参考阵列的DOA方位,即θi(i=1,2, …,n)。
2 基于差分进化机理的目标船舶方位估计
2.1多变异策略的差分进化机理
差分进化算法是STORN等[8]提出的一种模拟生物进化的群体寻优算法,容易实现,且受控参数少。利用该算法求解优化问题时,待优化参数相当于进化的生物,而生物进化一次相当于对待求解的参数完成一次优化迭代。通过模拟生物进化机理来进行一次参数的优化迭代,其过程包括变异、交叉和选优等3个阶段。虽然众多的数值优化分析实例都证明差分进化算法比遗传算法(Genetic Algorithm, GA)和粒子群优化(Particle Swarm Optimization, PSO)算法具有更好的优化及收敛性能[9-11],但其依然与其他传统智能群体优化算法一样存在收敛速度慢和收敛“过早熟”的不足。原型的差分进化算法中单一变异策略增加了算法陷入局部最优或早熟收敛的概率,解决该问题的思路是使变异策略多样化。这里将待优化解参数记为β,提出多变异策略搜索下一个优化解的迭代计算式可改为
(5)


(6)
式(6)中:fit(βl)为衡量第l个解βl优化效果的目标函数。
交叉阶段产生新解的迭代由式(7)描述。
(7)
式(7)中:ks为[1,Ns]中的随机整数;φ为[0,1]中产生的随机数;CR为交叉率,其取值范围为[0,1]。
为进一步提高算法的优化和收敛性,所提出的差分进化算法的选优阶段不仅要根据目标函数值从原来的β和βc中选出下一代的优化解β,还要引入“优胜劣汰”机制,对klimit次没有得到更新的β按式(8)对其元素进行重新赋值。
β(l,d)=βmax(d)+βmin(d)-β(l,d)
(8)
2.2基于差分进化机理的目标船舶DOA方位估计
目标DOA方位的估计包括目标数n的估计和n个方位θi的估计,其中:目标数n可通过文献[12]的交叉互验技术进行估算,这里不再赘述;n个DOA方位θi利用似然函数估计(见式(9))。
(9)

(10)

若将差分进化算法待优化解β定义为DOA方位θ,则应用基于差分进化机理的DOA估计原理定位目标船舶方位的实现步骤归结如下。
1) 初始化最大迭代次数kmax,klimit和CR,未得到更优解的记录k(l)count,进化生物的规模Ns和待优化解的维数D;在[βmin(d),βmax(d)]中随机产生β(l,d)初始值,l=1, 2, …,Ns,d=1, 2, …,D。
2) 根据式(5)得到变异阶段的更新解βm。
3) 根据式(6)得到杂交阶段的更新解βc,并根据式(9)和式(10)计算其相应的目标函数J。
4) 根据J值的大小关系,从上次迭代的β和步骤3计算的βc中选出新的优化解;若选择的新的优化解为上次迭代的β,则相应的进化生物的k(l)count=k(l)count+1,对于k(l)count>klimit的β,根据式(7)产生其新解,否则置k(l)count=0。
5) 从β中选取到目前为止最优的可能解βbest,若满足收敛条件,则转入步骤6);否则,转回步骤2。
6) 根据式(10),从β中选出全局最优的可能解,则其元素为估计的目标船舶方位。
3 基于差分进化机理的目标船舶方位估计试验
为考察上述差分进化算法优化函数的效果,选取目标船舶发送服从正则分布的信号和非正则分布的信号2种源信号进行试验。
1)在源信号服从正则分布的仿真试验中选取的3个信号的星座图见图2,发送这3个信号对应的船舶所处的方位为θ=[10°,45°,-45°]。

a)正则源信号1b)正则源信号2
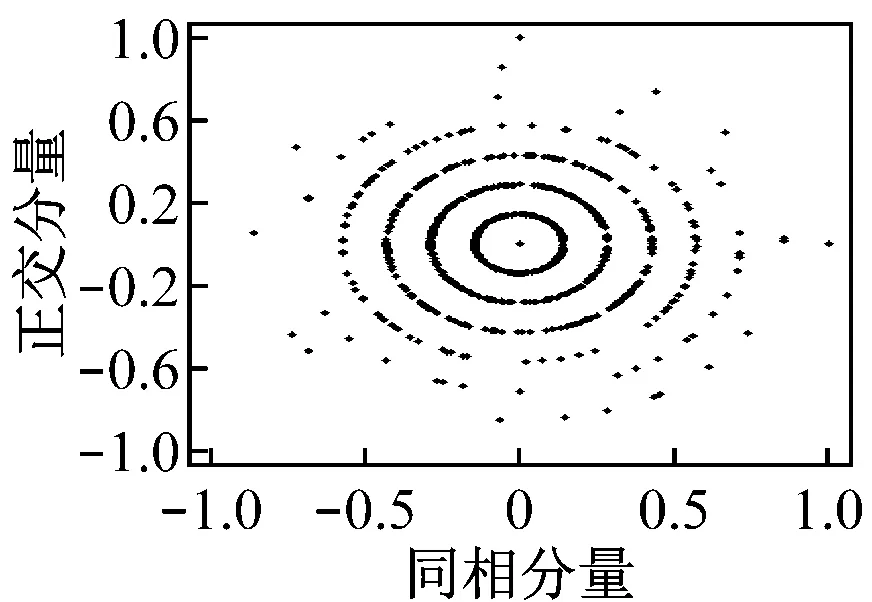
c) 正则源信号3
2)在源信号服从非正则分布仿真中选取的3个信号的星座图见图3,发送这3个信号对应的船舶所处的方位为θ=[-10°,45°,-45°]。
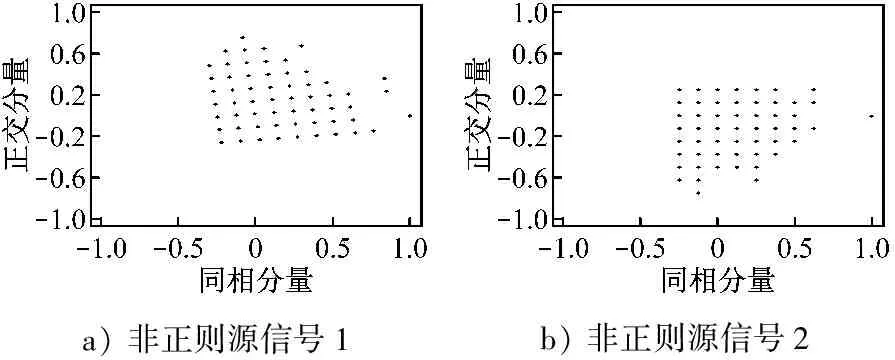
a)非正则源信号1b)非正则源信号2

c) 非正则源信号3
除利用该算法对目标函数J进行优化之外,还将该算法与文献[8]中原型的差分进化优化算法、文献[13]中改进的差分进化优化算法及文献[14]中PSO优化算法的试验结果进行比较和仿真。图4为4种不同优化算法对估计DOA的似然函数进行优化的收敛曲线,通过该曲线可直观分析不同算法的优化收敛能力。独立运行30次仿真试验,阵元数m=8。图4中的MDE为文献[13]中提出的改进的差分进化优化算法;而IDE算法为这里所提出的改进算法。IDE,MDE和DE等3种算法的参数设置为:kmax=500;CR=0.5;Ns=20。PSO优化算法的参数设置为:最大迭代次数=200;粒群规模=20;最大惯性权值因子=0.9;最小惯性权值因子=0.4;加速常数均为2。
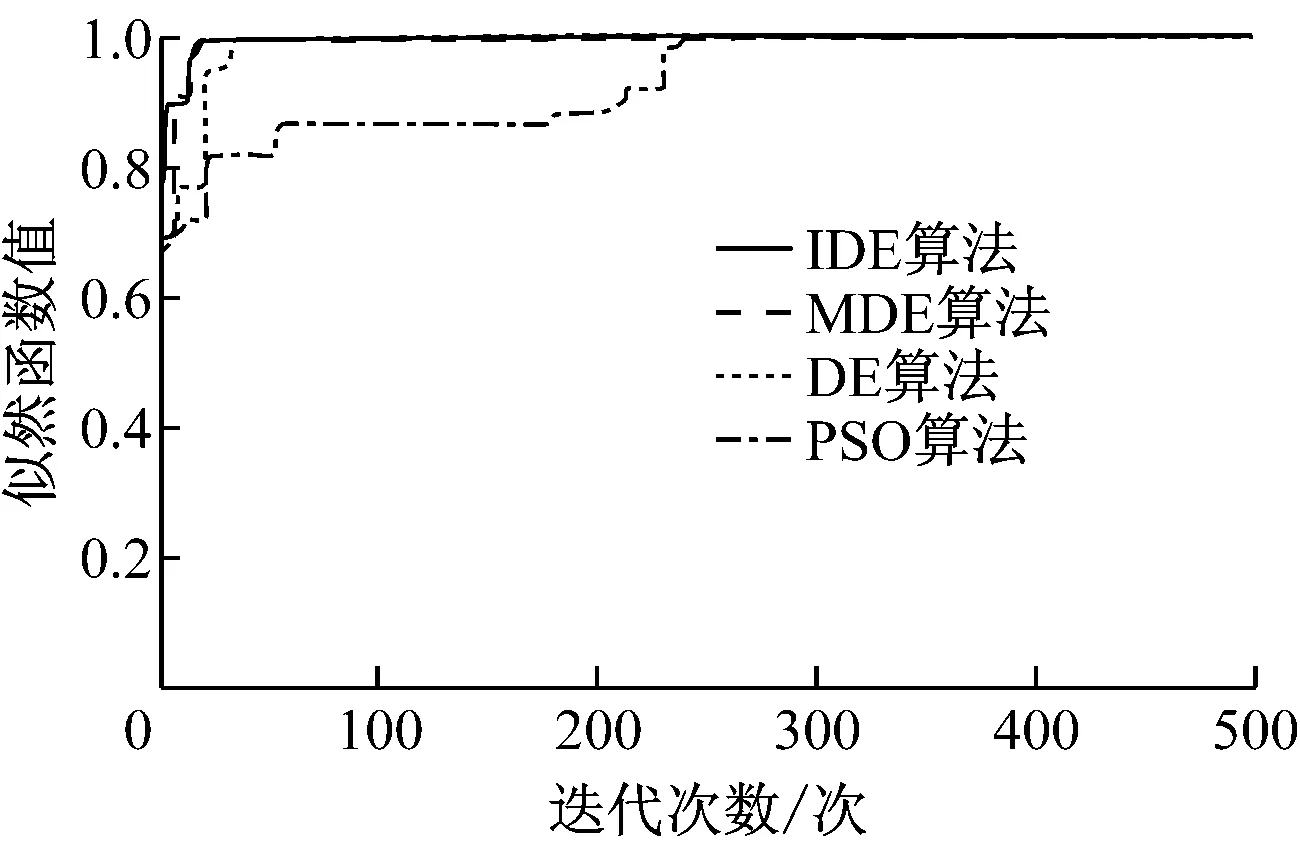
a) 正则分布的源信号

b) 非正则分布的源信号
由图4可知,所提出的IDE算法具有比MDE算法、DE算法和PSO算法更好的优化效果,这也说明通过改进差分进化算法中多变异策略和“优胜劣汰”选优方法的相互作用来改善相关算法的优化性能的思路是可行的,实际仿真试验结果也达到了预期目标。
在验证基于差分进化机理的目标船舶DOA方位有效性的仿真试验中选取的源信号星座见图5,其中:s1(t)为服从超高斯分布的非正则信号;s2(t)为服从亚高斯分布的正则信号;s3(t)为服从超高斯分布的16QAM正则信号;s4(t)为服从亚高斯分布的BPSK非正则信号。发送这4个信号对应的船舶的方位为θ=[10°,-10°,45°,-45°]。
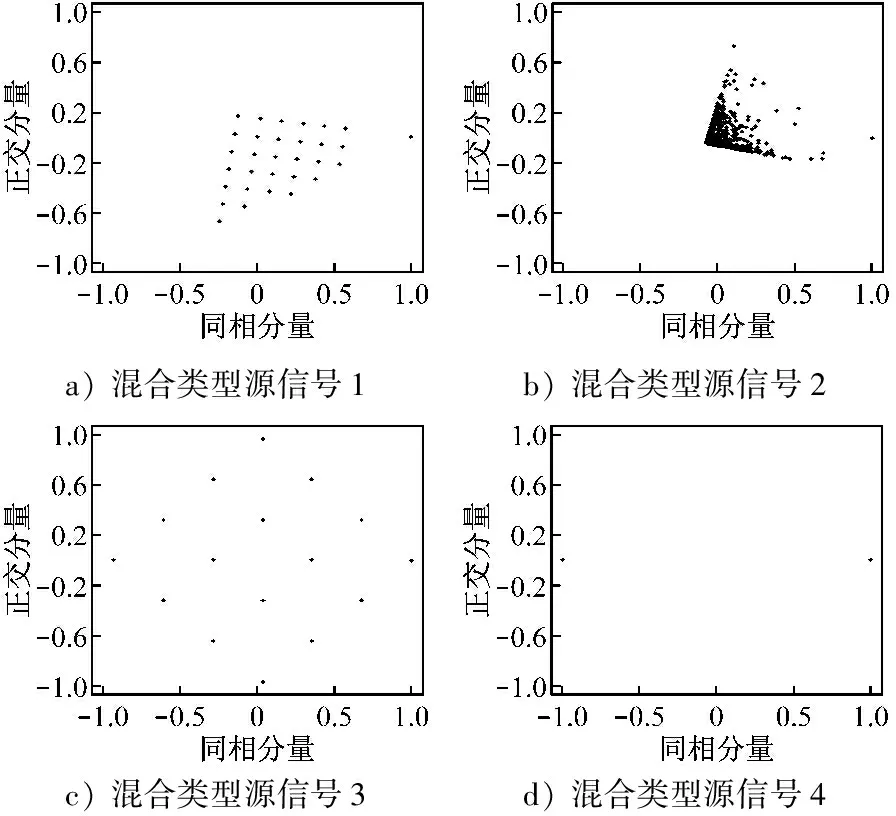
a)混合类型源信号1b)混合类型源信号2c)混合类型源信号3d)混合类型源信号4
图5 混合类型信号的星座图
差分进化优化算法相关的参数设置为:kmax=1 000;CR=0.5;Ns=20。此外,将该算法与文献[2]中基于MUSIC的算法、文献[5]中基于ESPRIT的算法和文献[15]中以最大似然函数为目标函数的算法进行仿真比较。为定量分析不同方法估计的效果,通过式(11)来评价不同算法的性能,对不同信噪比(Signal to Noise Ratio,SNR)下的估计结果比较见图6。
(11)
式(11)中:K为仿真试验的次数。

图6 不同方法的估计性能
由图6可知,信噪比较高(即SNR≥0 dB)时,基于差分进化机理的目标船舶DOA方位估计方法对目标船舶的DOA估计的质量与其他方法很接近;但信噪比较低(即SNR<0 dB)时,该方法的性能明显优于其他方法。仿真试验结果表明,将改进的差分进化机理与估计DOA的似然目标函数相结合来估计目标船舶的方位是可行的。
4 结束语
为解决目标船舶定位问题,首先将多变异策略和“优胜劣汰”机制融入到差分进化优化算法中,然后将改进的差分进化机理与似然函数相结合应用于目标船舶的DOA方位估计中。在仿真试验中:对源信号服从正则分布和非正则分布2种情况下的似然函数进行测试,结果表明改进的差分进化方案合理,且具有比其他算法更好的优化性能;对正则和非正则混合类型源信号进行DOA方位估计试验,结果表明基于差分进化机理的目标船舶方位估计方法不仅有效,而且具有比其他传统方法更好的鲁棒性。
[1] 张贤达. 现代信号处理[M]. 北京: 清华大学出版社, 2002:350-401.
[2] ZHANG Y, NG B P. MUSIC-Like DOA Estimation Without Estimating the Number of Sources[J]. IEEE Transcations on Signal Processing, 2010, 58(3): 1668-1669.
[3] JENSEN J R, CHRISTENSEN M G, JENSEN S H. Nonlinear Least Squares Methods for Joint DOA and Pitch Estimation [J]. IEEE Transactions on Audio, Speech, and Language Processing, 2013, 21(5): 923-9333.
[4] STOICA P, GERSHMAN A B. Maximum-Likelihood DOA Eestimation by Data-Supported Grid Search [J]. IEEE Signal Processing Letters, 2009, 6(10): 273-275.
[5] VOLODYMYR V. Improved Beamspace ESPRIT-Based DOA Estimation Via Pseudo-Noise Resampling [C]. EuMW & EuRAD, 2012: 238-241.
[6] VANTREES H L. Optimuum Array Processing Part IV of Detection, Estimation and Modulation Theory [M]. New York: John Wiley & Sons, 2001:96-105.
[7] LI H L, ADALI T. A Class of Complex ICA Algorithms Based on the Kurtosis Cost Function [J]. IEEE Transactions on Neural Networks, 2008, 19(3): 408-419.
[8] STORN R, PRICE K. Differential Evolution-A Simple and Efficent Adaptive Scheme for Global Optimization Over Continuous Spaces [R]. Berkeley: University of California, 1996.
[9] WANG R J, ZHU Y. Nonlinear Dynamic System Identification Based on FLANN[J]. Journal of Jimei University: Natural Science, 2011, 16(2): 128-134.
[10] BABITA M, PANDA G. Development of Efficient Identification Scheme for Nonlinear Dynamic Systems Using Swarm Intelligence Technique[J]. Expert System with Applications, 2010, 37(1): 556-566.
[11] TOMAN M, STUMBERGER G, DOLINAR D. Parameter Identification of the Jiles-Atheton Hysteresis Model Using Differential Evolution[J]. IEEE Transactions on Magnetics, 2008, 44(6): 1098-1111.
[12] RAHNAMAYAN S, TIZHOOSH H R, SALAMA M A. Opposition-Based Differential Evolution[J]. IEEE Transactions on Evolutionary Computation, 2008, 12(1): 64-79.
[13] 王荣杰. 欠定盲源分离和自适应复数盲源分离算法的研究[D]. 广州: 中山大学, 2012.
[14] KENNEDY J, EBERHART R C. Particle Swarm Optimization [C]. Proceedings of IEEE International Conference on Neural Networks, 1995:1942-1948.
[15] LI M H, LU Y L. Accurate Direction-of-Arrival Estimation of Multiple Sources Using a Genetic Approach [J]. Wireless Communcations and Mobile Computing, 2005, 5(3): 343-353.
TargetBearingEstimationUsingDifferentialEvolutionMechanism
(1. Marine Engineering Institute, Jimei University, Xiamen 361021, China; 2. School of Engineering, Sun Yat-Sen University, Guangzhou 510006, China;3. Fujian Provincial Key Laboratory of Naval Architecture and Ocean Engineering, Xiamen 361021, China)
U675.7
A
2016-04-18
国家自然科学基金(51309116); 福建省教育厅杰青项目(JA14169); 人工智能四川省重点实验室开放课题(2014RYJ03); 集美大学科研基金(ZQ2013001;ZC2013012); 福建省自然科学基金(2016J01736)
王荣杰(1981—), 男, 福建晋江人, 副教授, 硕士生导师, 博士, 从事智能信息处理和电力电子电路故障诊断方向的研究。 E-mail: roger811207@163.com
1000-4653(2016)02-0006-05
猜你喜欢
数学杂志(2022年5期)2022-12-02
贵州师范大学学报(自然科学版)(2022年5期)2022-11-18
湘潭大学自然科学学报(2022年2期)2022-07-28
幼儿园(2021年12期)2021-11-06
新世纪智能(数学备考)(2021年5期)2021-07-28
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
上海师范大学学报·自然科学版(2018年3期)2018-05-14
小学生时代·大嘴英语(2015年7期)2015-11-23
太空探索(2014年1期)2014-07-10
