
非协同方式多微小型飞行器区域覆盖多目标的弹道建模与设计
2016-10-14 08:36都业宏郁浩张军李杰徐兴建
兵工学报 2016年5期
都业宏,郁浩,张军,李杰,徐兴建
(1.中国白城兵器试验中心,吉林白城137001;2.北京理工大学机电学院,北京100081)
非协同方式多微小型飞行器区域覆盖多目标的弹道建模与设计
都业宏1,2,郁浩1,张军1,李杰2,徐兴建2
(1.中国白城兵器试验中心,吉林白城137001;2.北京理工大学机电学院,北京100081)
为提高微小型飞行器(MAV)群对作战目标侦察攻击的适应能力,建立多MAV非协同方式区域覆盖多目标问题模型。应用云模型模拟MAV的起飞点坐标值,应用蒙特卡洛方法模拟起飞方向角度值,建立与问题模型相关的目标区域模型、MAV探测模型、起飞点模型、初始飞行方向模型和弹道模型。为提高优化设计效率,在对期望覆盖率指标进行了稳定性分析的基础上,确定计算期望覆盖率的最小模拟次数。应用多目标遗传算法对建立的多目标问题模型进行了求解,得到了非协同方式条件下多MAV区域覆盖的弹道设计方案。从MAV的探测半径与目标区域半径的比例关系出发,对这些方案适于解决的问题进行了分析。该弹道降低了MAV控制难度,兼顾了覆盖率、MAV数量和航程3个目标。
兵器科学与技术;非协同方式;微小型飞行器;区域覆盖;弹道设计;多目标优化
0 引言
为激发出单独无人飞行器(UAV)所不具备的作战效能或完成单独UAV无法完成的任务,国内外很多学者提出多UAV协同作战方法,以衍生出UAV群系统的整体作战效能,完成单独UAV无法完成的任务[1-2]。借鉴UAV协同作战研究成果,国内外学者在微小型飞行器(MAV)协同作战领域也取得了一些研究成果[3-7],但这些成果大都是在进行了一些假设条件下完成的。常见的或默认的假设有:
1)通信链路完全可靠;
2)可在最小或近乎最小转弯半径下进行滚转和偏航协同转弯;
3)定速飞行;
4)完全抗干扰、抗电子诱骗,或无干扰、无电子诱骗。
MAV作为一种小型UAV,它比常见的UAV更小、更轻、更具机动能力。MAV与体积较大的UAV相比有较多的共性,但也有很多不同,并且与当前某些研究成果的假设相矛盾,主要有:
1)MAV采用的通信硬件相对于UAV采用的通信硬件性能有很大差距,导致MAV间通信效能明显低于UAV间通信效能;
2)MAV采用的主控硬件相对于UAV采用的主控硬件性能有很大差距,加之MAV强不确定性、强耦合性和强扰动特性,MAV飞控系统承担的任务更加艰巨;
3)通常MAV采用电动力驱动飞行方式,导致其承载能力有限、航程有限,由于其抗风能力有限,故仅能在较低空域(通常不大于500 m)低速(通常不大于70 m/s)飞行;
4)MAV抗电磁干扰和电子诱骗能力相对于UAV有很大差距;
5)MAV实时处理MAV间作战信息能力相对于UAV差别巨大。
Kress等[8]针对不同的目标识别率条件下进行了UCAV的协同作战模拟,从统计结果来看,在目标识别率较低的情况下进行协同作战是没有意义的。MAV群组的非协同方式作战与协同作战的相同之处:均具有群组作战特征,即能够胜任单架MAV无法完成的任务。MAV群组的非协同方式作战与协同作战的主要不同之处在于:
1)MAV间无通信数据交互,可以避免外界电子干扰与欺骗,可规避 MAV群组作战效能减弱或丧失;
2)MAV群组采用非协同作战方式时,MAV单机按预先设定作战计划工作,不需要兼顾MAV间的信息互通、MAV与MAV群组间的信息共享,降低了MAV控制系统的负担,使MAV飞行控制系统设计更加简洁、可靠;
3)MAV采用离线工作模式,不需要安装无线通信硬件设备,大幅降低了MAV研制成本;
4)协同能够对动态威胁环境进行一定程度的反应,而非协同方式则难以做出相应的反应。
而且,MAV群组采用非协同方式作战时,需要MAV群组在某一空间点投放并完成弹机转换和初始转平飞过程,MAV的平飞起点和初始航向具有随机性[9];载荷有限,完成任务不需要回收,“打出去不管”[10]。
通常情况下,在建立弹道的多目标模型时,UAV介入目标区域的位置和飞行方向是确定的,完成覆盖任务的时间也是按照这样的条件进行计算的。然而,由于MAV具有前述的两个特点,就需要布撒器远距离抛撒MAV,MAV完成弹机转换和初始转平飞过程后,经过一段dubins路径[11]飞行至为其设计的覆盖弹道起始位置,这样就增加了完成覆盖任务的时间。
从战场环境方面考虑,高新技术应用于现代战争的水平差异,已导致非对称作战在一定程度、某些方面有所呈现,军事博弈致使战场环境日趋非线性和复杂化,并具有随机性、模糊性、强对抗性、欺骗性等不确定性特点。在当前复杂的战场环境对抗中,强电磁干扰和欺骗成为应对MAV群组协同作战的一种有力武器;受自身载荷和航程的限制,需要MAV配备小体积、轻重量、低功耗、高可靠、抗干扰、低成本的通信器件,这类通信器件仍亟待研制。
因此,为提高MAV群对目标区域覆盖的速度,及其在复杂战场环境下的适应能力,降低MAV其控制系统负担,本文充分利用MAV的工作特点,设计了非协同方式的 MAV群组区域覆盖的弹道方案。
1 云模型
为对MAV起飞点和初始航向进行模拟,本文引入了云模型方法模拟MAV的起飞点,引入了蒙特卡洛方法[12]模拟MAV的初始航向。下面重点对云模型方法进行简要介绍。
云模型[13]是李德毅院士提出的定性和定量转换模型,文献[13-14]中详细介绍了云模型基础理论。文献[15]应用云模型对武器系统故障进行了预测,对正向云发生器和逆向云发生器算法进行了详细叙述,并用Mat1ab语言对这两种算法进行了实现,因此本文不再赘述。文献[16]应用二维云模型对射击精度合格率进行了评价。
设U是一个精确数值集合的定量论域,C是U上的定性概念。若定量值x∊U,且x是定性概念C的一次随机实现,x对C的隶属度μi∊[0,1]是具有稳定倾向的随机数,则x在论域U上的分布成为云,每个x成为一个云滴x∊U.
云模型的数字特征是描述云模型、产生虚拟云、实现云计算、完成云变换的数值基础,也是利用云技术从含有不确定性的空间数据库或空间数据仓库中发现空间知识的基础。云的数字特征用期望值Ex、熵En、超熵He 3个数值表示,如图1所示,其中:纵坐标为云滴的隶属度MG,横坐标为云滴的数值V;Ex反映了定性概念的云滴群的中心值;En在云模型中用来综合度量定性概念的模糊度和概率,En的大小直接决定论域中可被模糊概念接受的范围;He 是En的不确定度量,其大小间接地表示了云的离散程度和厚度。
取三维云模型的数字特征为

其1 000个云滴的效果在三维上展开如图2所示。
2 涉及到的模型
MAV弹道的设计涉及到目标区域模型、MAV探测模型、起飞点模型、初始航向模型和弹道模型的建立。
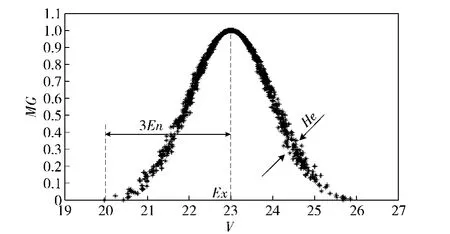
图1 云模型的数字特征Fig.1 Numerica1 characteristics of c1oud mode1

图2 三维云模型示意图Fig.2 Schematic diagram of three-dimensiona1 c1oud mode1
2.1目标区域模型
目标区域如图3所示,O(XO,YO)为目标区域的中心位置,R为目标区域半径。

图3 圆形作战区域Fig.3 Round combat zone
对战场平面进行栅格化处理,表示成节点(X,Y,p(X,Y)),{(X,Y)|(X-XO)2+(Y-YO)2≤R2}为战场的栅格点。令p为战场目标域(X,Y)栅格处的探测率。p的更新公式为

式中:NM为MAV数量;pi(X,Y)为第i枚MAV对(X,Y)栅格处的探测率。
2.2MAV探测模型
MAV探测器探测范围如图4所示。

图4 MAV探测示意图Fig.4 Schematic diagram of MAV detection

2.3起飞点
设定每枚布撒器额定携带12枚MAV,介入方向相互垂直,起飞点坐标如图5所示,MAV经弹机转换和初始转平飞过程后即开始遂行区域覆盖任务。第1枚布撒器抛洒的MAV起飞点以黑色圆点标记,第2枚布撒器抛洒的MAV以黑色方块标记。
MAVi的起飞点坐标(SXi,SYi,SZi)服从三维独立正态分布,则

图5 起飞点分布示意图Fig.5 Schematic diagram of take-off point distribution
式中:CG为正向云发生器[13-16];(ExXi,ExYi,ExZi)为MAVi的期望起飞点,
{EnXi,EnYi,EnZi}和{HeXi,HeYi,HeZi}为应用逆向云发生器算法[13-16]和大量MAV初始转平飞试验数据计算所得到的起飞点熵值和超熵,

2.4起飞航向
MAV初始转平飞存在平飞航向的不确定性[9]。起飞航向为一维均匀分布,即


2.5弹道
本文的弹道设计需要有两点考虑:1)能够覆盖圆形作战区域的边界区域;2)便于MAV在离线条件下跟踪控制。覆盖作战区域的边界区域,MAV要在近边界区域飞行一段距离;设计的弹道便于跟踪控制,尽量不采用小的转弯半径,到达指定的目标区域尽量采用大的转弯半径,同时分段航线在衔接点处相切。
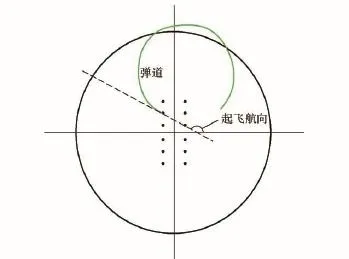
图6 MAV起飞航向示意图Fig.6 Take-off direction of MAV
MAV的弹道可以参数化地表示为
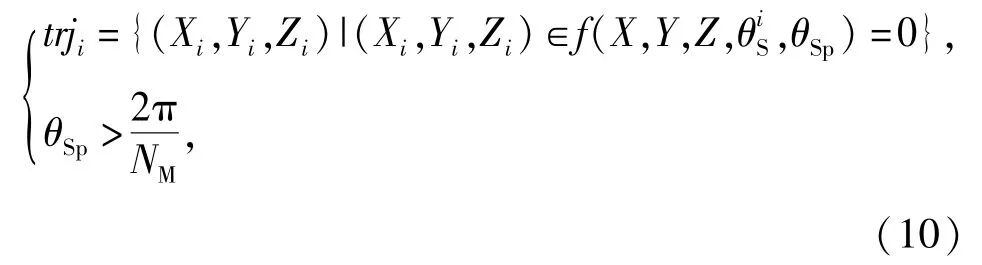
式中:θSp为MAV的扫掠角。为了减少控制系统的负担,本文借鉴dubins路径设计方法,采用3段相切圆弧弹道拼接成MAV飞行弹道,令MAV在距地面100 m空域飞行。起飞点在(0,0,0),起飞航向为0,θSp为0.5πrad的弹道f(X,Y,100,0,0),如图7所示。
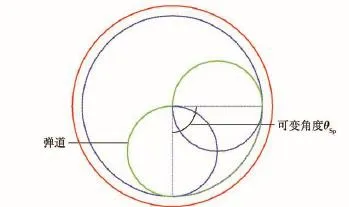
图7 弹道f(X,Y,100,0,0)示意图Fig.7 Schematic diagram of trajectory f(X,Y,100,0,0)
对图7中的弹道按照第1节和第2节中的方法赋予起飞点和起飞航向随机变量,弹道形状变为如图8所示的形式。
同时,由(2)式得
图8 赋予随机变量值后的弹道Fig.8 Trajectory after giving a random variab1e

3 目标函数

NT为仿真次数为第j次仿真(X,Y)栅格点处的覆盖率,battle为作战域栅格点集是平均MAV数量,

由于J3是关于θSp的正比例函数,因此可以将J3进一步简化为

实际作战条件下,对目标区域覆盖率有明确的要求,因此将目标转化为约束条件,本文设定为覆盖率不小于0.90.
因此目标函数变为

4 仿真示例
4.1单次模拟飞行试验
起飞点按布撒器抛洒排列,引入起飞点、起飞航向随机变量的条件下,某次模拟的24枚MAV的弹道如图9所示。24枚MAV的探测轨迹叠加后的覆盖效果如图10所示。随着MAV数量的增加,覆盖率的变化如图11所示。
图9 单次模拟时MAV1~MAV24的弹道Fig.9 Trajectories of MAV1~MAV24in a simu1ation

图10 24枚MAV弹道叠加后的覆盖效果Fig.10 Coverage effect after superimposition of 24 MAV trajectories
图11 单次模拟时随着MAV数量增加的覆盖率变化Fig.11 Vairiation of coverage rate when MAV number increases in the case of sing1e simu1ation
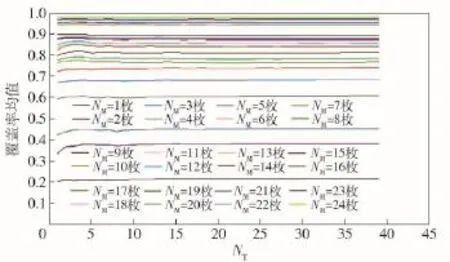
图12 不同数量MAV条件下的覆盖率均值随模拟次数的变化Fig.12 The mean va1ue of coverage rate when number of simu1ations increases in the cases of different number of MAVs
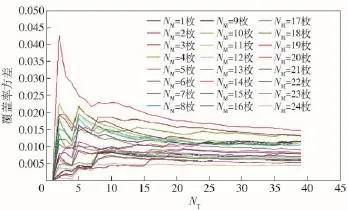
图13 不同数量MAV条件下的覆盖率方差随模拟次数的变化Fig.13 Variation of coverage variance when the number of simu1ations increases in the cases of different number of MAVs
4.2试验次数的确定
先排除起飞角度θS影响,将其设置为定值。不同数量MAV的条件下,覆盖率均值和方差随模拟次数的变化规律分别如图12和图13所示。
从图13中可以看出,不同的MAV数量的作战区域有效覆盖率,在模拟次数5次以上时趋于稳定。因此,对同一自变量进行5次模拟以计算平均覆盖率目标。同时,对40次模拟的覆盖率数据进行正态分布假设检验,确定覆盖率服从正态分布。
处理多目标问题,可以将各个目标进行归一化,并赋予不同的权重后,应用单目标智能优化算法进行求解;也可以应用基于非劣解集的方法,对单目标智能优化算法进行改进,以适应求解多目标优化问题,这类改进后的算法常被称为多目标优化算法。当前,求解多目标问题的智能算法获得了很大的发展,且应用领域也较为广泛,如多目标粒子群算法(MOPSO)[17]、多目标遗传算法(MOGA)[18]、多目标蚁群算法(MOACO)等,也有较为年轻的多目标智能优化算法,如多目标烟花算法(MOFWA)[19-20]等。
本文的弹道设计是一个离线问题,对算法求解的实时性要求不高,只要能收敛到近似最优解即可,因此采用MOGA对第3节中的目标函数(17)式进行优化,优化结果与分析见4.3节。
4.3结果与分析
优化结果如图14和表1所示。
由于多枚MAV在布撒器中为对称排列,MAV群组数量为偶数,故排除第4组、第5组和第6组解,第1组、第2组和第3组解可供决策者依据攻击成本、攻击耗时进行决策。
从图14和表1可以看出,MAV群组数量和覆盖耗时之间在一定范围内存在此消彼涨的关系。MAV群组数量不大于12时,随着MAV群组数量增加,覆盖耗时明显减少;但MAV群组数量大于12时,随着MAV群组数量增加,覆盖耗时不再显著减少,MAV群组数量存在冗余。这是因为本文设计的弹道是基于2.5节中的两点考虑,即便于MAV弹道跟踪控制和覆盖近边界区域,所设计的弹道(见图6)仅有1个自变量。
本文中MAV的探测半径与目标区域的半径之比为1∶5,比值较大,对于较大目标区域的覆盖则可以考虑应用文献[17]中的方法进行覆盖;在起飞点和初始转平飞方向存在不确定性的条件下,可以考虑重新设计弹道形状,如阿基米德螺旋线或组合弹道等弹道形状。而更大目标区域的覆盖则不应是MAV群组的工作范畴。
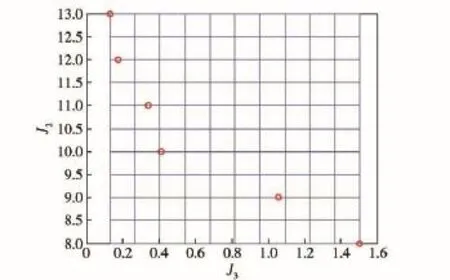
图14 多目标遗传算法优化结果Fig.14 The optimized resu1ts of MOGA
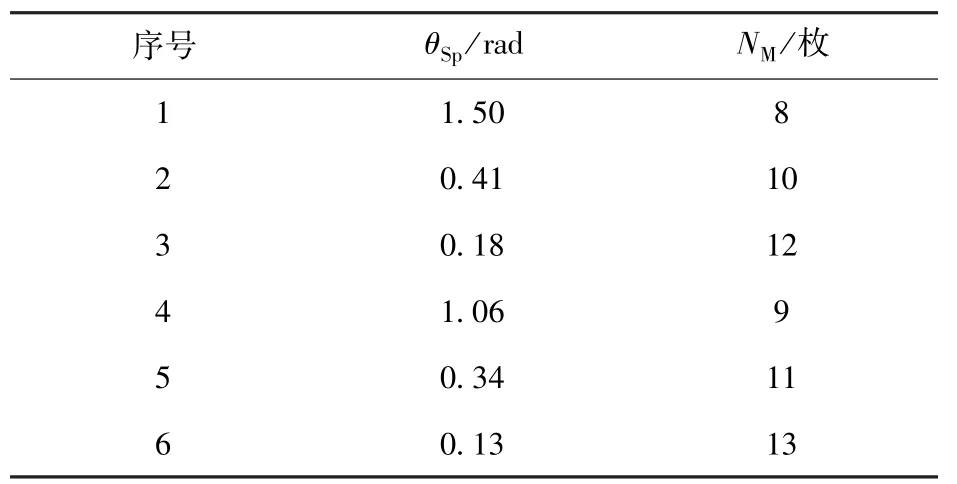
表1 多目标遗传算法优化结果Tab.1 The optimized resu1ts of MOGA
5 结论
本文提出的非协同方式多MAV区域覆盖弹道设计方案,通过第1~4节的研究得出如下结论:
1)本文设计的多MAV区域覆盖弹道方案可以提升MAV群对作战目标的侦查攻击适应能力,是在强电磁干扰、强电子诱骗条件下对协同攻击的有力补充。
2)设计的弹道为3段圆弧拼接而成,其半径均比MAV最小转弯半径大,降低了控制难度。
3)分析了覆盖率数据的分布规律,确定了计算单组目标函数的最小模拟次数,降低了计算成本。
4)设计的弹道兼顾了覆盖率、MAV数量和航程3个目标。
(References)
[2]沈林成,牛轶峰,朱华勇.多无人机自主协同控制理论与方法[M].北京:国防工业出版社,2013. SHFN Lin-cheng,NIU Yi-feng,ZHU Hua-yong,et a1.Theories and methods of autonomous cooperative contro1 for mu1tip1e UAVs [M].Beijing:Nationa1 Defense Industry Press,2013.(in Chinese)
[2]Gu X Q,Shen L C,Chen J,et a1.A virtua1 motion camouf1age approach for cooperative trajectory p1anning of mu1tip1e UCAVs [J].Mathematica1 Prob1ems in Fngineering,2014(2):1-15.
[3]王玥,冯顺山,曹红松,等.基于遗传算法的多枚巡飞子弹探测阶段协同弹道规划[J].战术导弹技术,2006(5):80-82. WANG Yue,FFNG Shun-shan,CAO Hong-song,et a1.Coordinated trajectory p1anning of 1oitering sub-munition on detective stage based on genetic a1gorithm[J].Tactica1 Missi1e Techno1ogy,2006(5):80-82.(in Chinese)
[4]吴蔚楠.巡飞弹协同攻击任务规划问题建模与方法研究[D].哈尔滨:哈尔滨工业大学,2013. WU Wei-nan.Research on mode1ing and method for cooperative combat task p1anning of mu1tip1e cruise f1ight missi1es[D].Harbin:Harbin Institute of Techno1ogy,2013.(in Chinese)
[5]李杰,游宁,李兵,等.云弹药系统[J].兵工学报,2015,36(2):250-254. LI Jie,YOU Ning,LI Bing,et a1.C1oud ammunition system[J]. Acta Armamentarii,2015,36(2):250-254.(in Chinese)
[6]Li B,Li J,Huang K W.Mode1ing and f1ocking consensus ana1ysis for 1arge-sca1e UAV swarms[J].Mathematica1 Prob1ems in Fngineering,2013(6):1-9.
[7]Li B,Li J,He G L,et a1.Research on cooperative combat for integrated reconnaissance-attack-BDA of group LAVs[J].Mathematica1 Prob1ems in Fngineering,2014(1):1-6.
[8]Kress M,Baggesen A,Gofer F.Probabi1ity mode1ing of autonomous unmanned combat aeria1 vehic1es(UCAVs)[J].Mi1itary Operations Research,2006,11(4):5-24.
[9]刘畅.伞降式小型飞行器初始转平飞控制技术研究[D].北京:北京理工大学,2014. LIU Chang.Technica1 research of initia1 state to 1eve1 f1ight contro1 for parachute-type sma11 aircraft[D].Beijing:Beijing Institute of Techno1ogy,2014.(in Chinese)
[10]苗昊春,杨栓虎.智能化弹药[M].北京:国防工业出版社,2014. MIAO Hao-chun,YANG Shuan-hu.Inte11igent1ized ammunition [M].Beijing:Nationa1 Defense Industry Press,2014.(in Chinese)
[11]关震宇,杨东晓,李杰,等.基于Dubins路径的无人机避障规划算法[J].北京理工大学学报,2014,34(6):571-575. GUAN Zhen-yu,YANG Dong-xiao,LI Jie,et a1.Obstac1e avoidance p1anning a1gorithm for UAV based on Dubins path[J]. Transactions of Beijing Institute of Techno1ogy,2014,34(6):571-575.(in Chinese)
[12]康崇禄.蒙特卡罗方法理论和应用[M].北京:科学出版社,2014. TANG Chong-1u.Theories and methods of mente-car1o[M].Beijing:Science Press,2014.(in Chinese)
[13]李德毅,杜鹢.不确定性人工智能[M].第2版.北京:国防工业出版社,2014. LI De-yi,DU Yi.Artificia1 inte11igence with uncertainty[M]. 2nd ed.Beijing:Nationa1 Defense Industry Press,2014.(in Chinese)
[14]苗夺谦,王国胤,姚一豫,等.云模型与粒计算[M].北京:科学出版社,2012. MIAO DUO-qian,WANG GUO-yin,YAO Yi-yu,et a1.C1oud mode1 and granu1ar computing[M].Beijing:Science Press,2012.(in Chinese)
[15]都业宏,连素杰,赵学刚.基于云模型和SWRL预测兵器试验故障的研究[J].科学技术与工程,2012,20(5):1175-1180. DU Ye-hong,LIAN Jie-su,ZHAO Xue-gang.Research on c1oud mode1 and swr1-based in weapon test fau1t prediction[J]. Science Techno1ogy and Fngineering,2012,20(5):1175-1180.(in Chinese)
[16]都业宏,郁浩,李国富,等.基于云模型的射击精度合格率及可靠性评估方法[J].弹道学报,2013,25(3):44-49. DU Ye-hong,YU Hao,LI Guo-fu,et a1.Fva1uation method of shooting accuracy rate and re1iabi1ity based on c1oud mode1[J]. Journa1 of Ba11istics,2013,25(3):44-49.(in Chinese)
[17]Du Y H,Cui H,Li B,et a1.Reasearch on regiona1 coverage with LAVs on MOPSOA[J].Journa1 of Information&Computiona1 Science,2015,12(6):2081-2092.
[18]都业宏,郁浩,赵静,等.武器系统预防性维修间隔期的多目标决策研究[J].兵工学报,2015,36(6):1898-1905. DU Ye-hong,YU Hao,ZHAO Jing,et a1.Mu1ti-objective decision of preventive maintenance interva1s of weapon systems[J]. Acta Armamentarii,2015,36(6):1898-1905.(in Chinese)
[19]Zheng Y J,Song Q,Chen S Y.Mu1tiobjective fireworks optimization for variab1e-rate ferti1ization in oi1 crop production[J]. App1ied Soft Computing,2013,13(11):4253-4263.
[20]谭营.烟花算法引论[M].北京:科学出版社,2015. TAN Ying.Introduction of fireworks a1gorithm[M].Beijing:Science Press,2015.(in Chinese)
Modeling and Design of Trajectory of Multi-MAVs for Coveraging Multi-targets in Non-cooperative Manner
DU Ye-hong1,2,YU Hao1,ZHANG Jun1,LI Jie2,XU Xing-jian2
(1.Baicheng Ordnance Test Center of China,Baicheng 137001,Ji1in,China;2.Schoo1 of Mechatronica1 Fngineering,Beijing Institute of Techno1ogy,Beijing 100081,China)
To improve the adaptabi1ities of reconnaissance and attack of mu1ti-MAVs,the trajectory of mu1ti-MAVs for coveraging the mu1ti-targets in non-cooperative manner is mode1ed.The take-off point coordinates of MAVs are simu1ated using c1oud mode1,and the taking-off direction is simu1ated by Monte Car1o method.The target zone mode1,MAV detection mode1,take-off point mode1,f1ight direction mode1 and trajectory mode1 are estab1ished.To improve the efficiency of the optimization design,the minimum number of simu1ations is determined based on the stabi1ity ana1ysis of the expected coverage.The mu1titarget prob1em is so1ved by MOGA,and the regiona1 coverage trajectory of mu1ti-MAVs in non-cooperative manner is determined.The prob1ems that can be so1ved by the schemes are ana1yzed according to the ratio of detecting radius to target zone radius.The designed trajectories reduce difficu1ty in contro1,and take coverage,the number of MAVs and f1ying range of MAV into account.
ordnance science and techno1ogy;non-cooperative manner;MAV;regiona1 coverage;trajectory design;mu1ti-target optimization
TJ012.3;V249.1
A
1000-1093(2016)05-0936-09
10.3969/j.issn.1000-1093.2016.05.023
2015-07-16
总装备部预先研究项目(2014年)
都业宏(1984—),男,工程师。F-mai1:yehong_du@126.com;郁浩(1971—),男,高级工程师。F-mai1:yuhao1i1ing@sina.com
猜你喜欢
今日农业(2022年15期)2022-09-20
舰船科学技术(2022年10期)2022-06-17
今日农业(2021年21期)2021-11-26
新世纪智能(高一语文)(2021年3期)2021-07-16
网络安全技术与应用(2019年5期)2019-06-05
民用飞机设计与研究(2019年4期)2019-05-21
价值工程(2018年3期)2018-01-23
电子制作(2017年24期)2017-02-02
