南昌红谷隧道管节沉放安装可视化监测技术
2016-10-19 01:59李志军
隧道建设(中英文) 2016年9期
张 伟, 张 毅, 李志军
(1. 中铁隧道勘测设计院有限公司, 天津 300133; 2. 广州打捞局, 广东 广州 510260;3. 中铁隧道集团二处有限公司, 河北 三河 065201)
南昌红谷隧道管节沉放安装可视化监测技术
张伟1, 张毅2, 李志军3
(1. 中铁隧道勘测设计院有限公司, 天津300133; 2. 广州打捞局, 广东 广州510260;3. 中铁隧道集团二处有限公司, 河北 三河065201)
为了在保证管节安装精度的同时加快管节安装速度,以红谷隧道管节沉放安装为例,采用一种可视化监测系统,在全站仪测量法及GPS测量法的基础上,通过计算机采集处理测量数据,形成可视化模型,并实时反映在终端屏幕上供指挥人员参考。经实测数据与理论精度计算对比表明,可视化监测系统在其精度满足管节沉放安装要求的同时,具有高效、直观的特点,可有效加快管节安装速度。
红谷隧道; 沉管法; 沉放; 安装; 可视化监测
0 引言
自1894年美国在波斯顿修建世界上第1座沉管隧道以来,截至2008年,中国、美国、荷兰、丹麦、挪威、日本等20多个国家已建成了100多条沉管隧道[1],并在近几年呈快速增长态势。我国沉管法隧道起源于香港地区,发展至今已建成有10余条隧道,主要分布于香港、台湾、广州、上海、天津、宁波、舟山等沿海城市或地区,目前在建的沉管法隧道还有佛山东平隧道、港珠澳大桥隧道、南昌红谷隧道、香港沙中线隧道。管节沉放安装作为施工过程中极其重要的一环,其施工测量技术直接关系到管节能否顺利沉放对接,是沉管法隧道施工中的重点和难点。由于我国使用沉管法进行隧道建设起步较晚,故相关的管节沉放安装测量技术还在不断地摸索总结当中,其中许琛等[2]、丁美等[3]、雷巨光[4]对管节安装测量的原理及精度进行了研究分析; 任朝军等[5]对国内外的管节安装测量技术进行了归纳总结; 赵坤[6]、成益品[7]对港珠澳大桥隧道管节安装测控系统进行了分析; 赵思齐[8]对沉管安装实时监控系统的开发进行了研究分析。
目前国内外应用较为广泛的管节沉放测量方法主要有全站仪法、GPS法、声呐法和机械法,其中国内已建成的沉管法隧道管节沉放测量主要采用全站仪法,且多采用人工测量为主的测量模式,测量效率较低,直接影响到管节安装速度,加大了管节安装过程中不确定因素造成的风险,故进行管节安装可视化实时监测系统的开发是有必要的。本文将对红谷隧道管节沉放可视化监测技术原理、监测方法及测量精度分析等进行阐述。
1 国内外管节沉放测量技术介绍
1)全站仪法。主要测量设备为测量塔、棱镜及全站仪,其中棱镜设置于测量塔顶部,通过岸上设置的全站仪放样棱镜的坐标及高程,并比较棱镜的实际坐标与设计坐标的差值,从而指导沉管的沉放[4]。特点: ①为便于换算,全站仪法通常设置2个计算状态,即管节调坡前(水平)状态及管节调坡后状态,在该2种状态下,全站仪法的精度较高。②当管节处于横倾状态或正在调坡状态时,全站仪法则无法进行修正,测量精度较低。③全站仪测量受空气质量、环境湿度、气压、温度影响较大,长距离测量时将影响精度。④需要测量人员不断测量及换算,速度较慢,同步性较差。
2)GPS法。主要测量设备为测量塔、GPS-RTK基站、GPS-RTK移动站,其中GPS-RTK移动站设置于测量塔顶部,以获得测量塔特征点的坐标及高程,进而判断待安装管节与已安装管节的相对关系、待安装管节与基槽的相对关系。特点: ①平面位置测量精度较高,高程测量精度较低。②受测量环境影响较小,但在无信号时无法使用。③测量精度受管节横倾影响较大。④可通过手簿实时观测测量数据,同步性较好。
3)声呐法。主要测量设备为超声波发射换能器、超声波接收换能器,分别设置于对接面的2个端面,通过超声波在换能器之间的传播时间,计算换能器间距,进而换算成对接面之间的相对位置关系。特点: ①无需测量塔,可用于深水条件下的管节沉放安装测量。②受水温、水质影响较大。③测量速度较快,同步性较好。④只能测量对接面2个端面的相对关系,无法测量管节尾部姿态。
4)机械法。主要测量设备为距离传感器、拉线单元、感应板,分别设置于对接面的两个端面,沉放初期利用拉线单元测量特征点距离及方位角,沉放后期则利用距离传感器测量特征点距离,从而达到指导管节沉放的目的,其特点是除不受水温、水质影响之外,其余与声呐法基本一致。
2 红谷隧道管节沉放可视化监测技术原理
红谷隧道管节沉放可视化监测技术的本质是全站仪法及GPS法的结合改良应用。由于管节沉放时,水流速度一般不大于0.5 m/s,可假设管节-测量塔体系为刚性体系。
在管节沉放前: 1)建立管节坐标系; 2)对测量塔特征点(棱镜及GPS移动站)进行标定,计算该特征点的管节坐标系三维坐标,并转换成施工坐标系(南昌城建坐标系)三维坐标; 3)利用上述管节坐标系三维坐标,在计算机内建立整个管节-测量塔体系的可视化模型,并加载至施工坐标系; 4)利用全站仪进行洞内测量,采集已沉放管节或暗埋段的里程、轴线、标高数据,建立可视化模型,并加载至施工坐标系。
在管节沉放时: 1)采用全站仪法及GPS法实时获得管节2个测量塔特征点的施工坐标系三维坐标、利用姿态传感器实时采集管节横倾值; 2)通过网桥或数据线将上述数据传输至计算机; 3)将上述施工坐标系三维坐标及管节横倾值通过软件进行处理,形成管节可视化模型在施工坐标系中的实时姿态; 4)将实时姿态在指挥终端进行三维显示,用于指导管节沉放。可视化监测原理见图1。
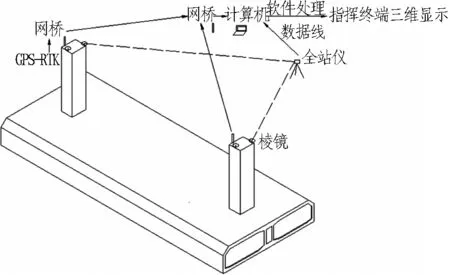
图1 可视化监测原理
3 红谷隧道管节沉放可视化监测方法
下面以南昌市红谷隧道工程为例,介绍管节沉放可视化监测方法。
3.1工程概况
南昌市红谷隧道工程是目前国内最大的内河沉管法隧道工程。本工程沉管段总长1 329 m,共分为12节管节,管节长90~115 m、高8.3 m、宽30 m、质量为22 000~28 000 t; 管头中部设置1处导向装置,管尾两侧各设置1处水下垂直千斤顶,3点形成管节沉放对接竖向支撑体系。管节沉放时,要求管头中部的导向装置先搭接,再将管尾落座至垂直千斤顶上。管节沉放安装的主要步骤包括管内压载、管节初步下沉、靠拢下沉、着地下沉、管节拉合初步止水、水压接等,而可视化监测技术主要应用于管节初步下沉阶段,在靠拢下沉、着地下沉阶段则需要采取辅助措施进行测量数据检验。
3.2管节坐标系的建立
为实现坐标转换,需建立管节三维直角坐标系。以设计的管节中轴面与管节底表面在管节末端的交点为原点O,管节中轴线为X轴,指向对接端为正向,指向右侧为Y轴,指向管节法线向上为Z轴正方向。这样管节的底表面位于XOY平面内,末端立面位于YOZ平面内,其他表面分别平行或垂直于坐标面。管节坐标系建立后,管节上任何一点都可以通过测量获得其管节坐标系中的三维坐标。管节坐标系示意图见图2。

图2 管节坐标系示意图
3.3管节控制点的测量
在管节顶面上,设置7个控制点,用于二次舾装时测量塔的校准及其他相关测量,控制点尽量选取管节特征点,如中轴线上、管节角点等。通过测量得出各控制点的管节坐标系坐标。管节控制点的布设及测量须在管节起浮前完成,以减少管节浮态横倾影响。管节控制点布置示意图见图3。
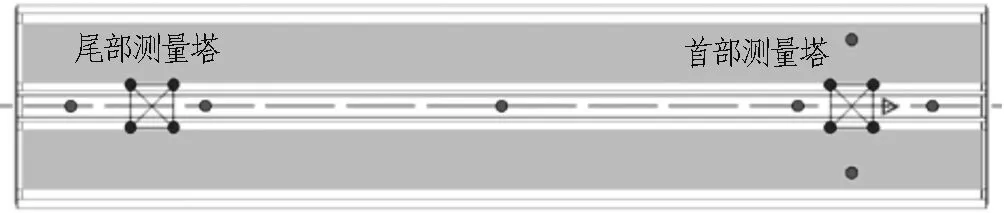
图3 管节控制点布置示意图
3.4主要设备的安装及标定
管节沉放可视化监测主要设备如表1所示。
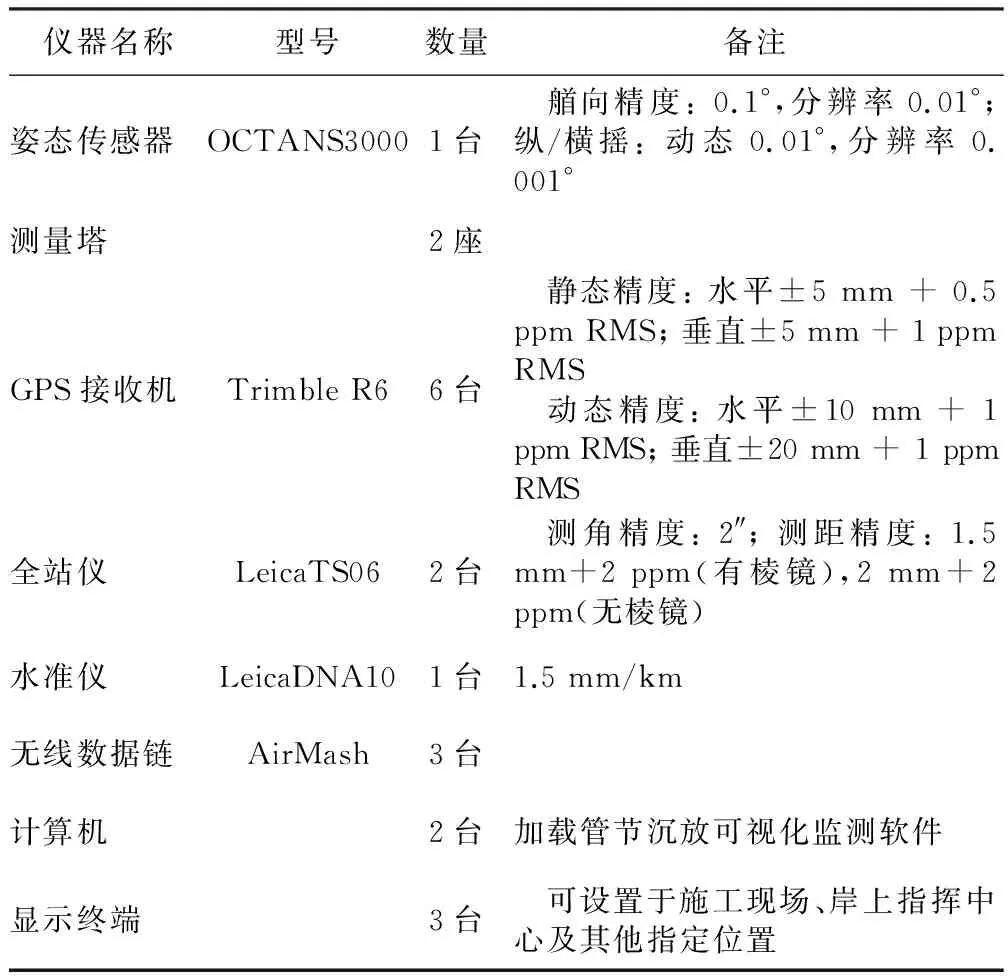
表1 可视化监测主要设备
3.4.1姿态传感器的标定
姿态传感器安装在管内,在管节坞内起浮前,需对姿态传感器进行标定,根据实测管节姿态设置姿态传感器初始值,以管节水平状态作为零值计算。
3.4.2测量塔的安装
测量塔的安装在管节沉放前进行,作为GPS移动站及棱镜的安装基础。
3.4.3GPS-RTK及棱镜的安装及标定
GPS-RTK及全站仪在可视化监测系统中的功能近似且没有明显界限,当一方出问题时,另一方可作为备用测量方法。GPS-RTK(移动站,下同)及棱镜安装在测量塔顶部,棱镜可选择360°全方位棱镜,便于从岸上测站观测,保证随时有光路返回。
GPS-RTK及棱镜的标定采用全站仪三维距离交会的方法进行,下文以GPS-RTK的标定为例,对标定的原理及方法进行说明。在管节上表面预留的3个以上控制点A、B、C、D…上,分别架设全站仪,精确量取仪器高。采用空间测距的方法,交会出测量塔顶部GPS-RTK天线位置(管节坐标系)。由于浮态的沉管表面非水平面,且处于动态,所以全站仪垂直轴非铅直,不能采用直接测坐标的方法,可采用测斜距的方法以减少测量误差。
建立数学模型如下:
设GPS-RTK天线位置为(x,y,z),控制点A、B、C、D…坐标分别为(Xa,Ya,Za)、(Xb,Yb,Zb)、(Xc,Yc,Zc)、(Xd,Yd,Zd)…,仪器高分别为ha、hb、hc、hd…, 令Ha=Za+ha、Hb=Zb+hb、Hc=Zc+hc、Hd=Zd+hd…,测得斜距分别为S1、S2、S3、S4…,此处所述的坐标系均为管节坐标系。则:




…。
当测站点大于3个时,采用最小二乘法获得方程的最优解(x,y,z),标定完成。棱镜及GPS-RTK标定见图4。
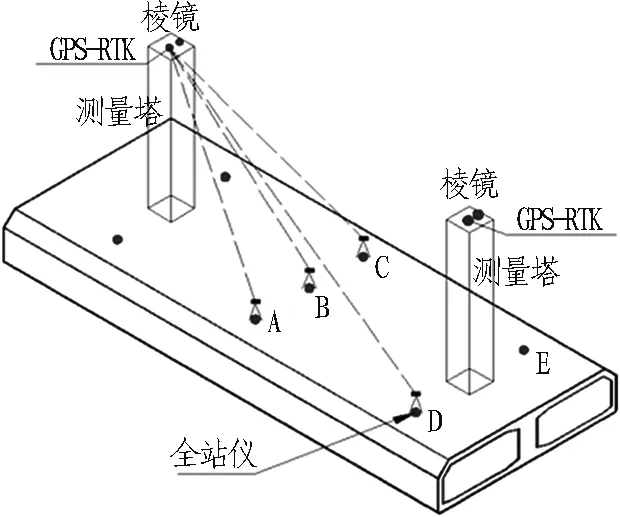
图4 棱镜及GPS-RTK标定
3.5管节沉放可视化监测
在管节沉放时,由GPS-RTK/全站仪采集测量塔顶部特征点的三维坐标(X,Y,H)、由姿态传感器采集管节横倾数据,通过通讯线缆、无线电数据链及串口通讯技术实时传输至数据处理计算机,计算以下参数: 管节的姿态数据,包括轴线方位(Heading)、纵向坡度(Pitch)、横倾(Roll); 管节首部对接面各个角部特征点实际位置与设计位置的横差、高差、纵差; 管节尾部底面角部特征点实际位置与设计位置的横差、高差,再由管节沉放可视化监测软件形成数字模型实时显示至各个终端,可从各个视点、多角度观察沉管的实时姿态和位置,用于指导管节沉放施工。管节沉放可视化监测软件示意图见图5。
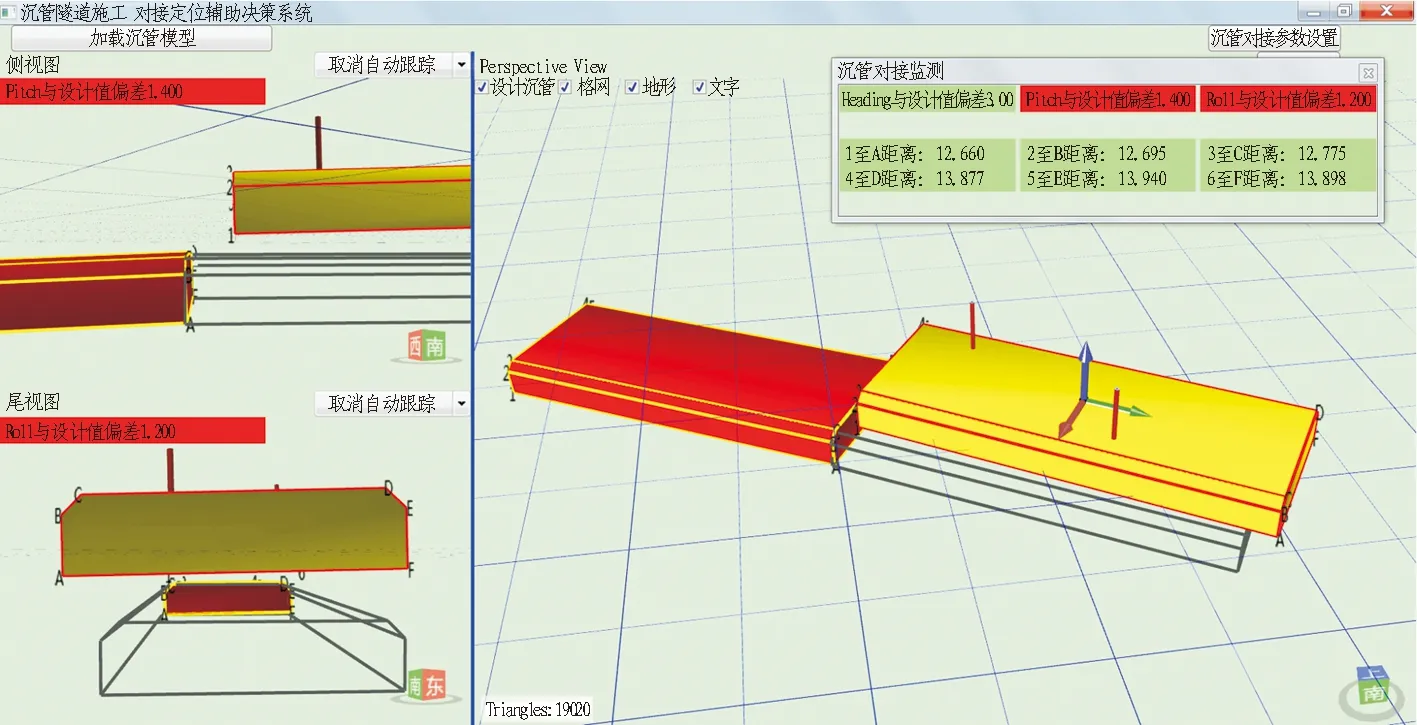
图5 管节沉放可视化监测软件示意图
4 测量精度分析
4.1管节沉放平面位置的精度分析
平面位置精度受到各个测量环节上的误差影响,包括: 特征点测量时的起算点误差、管节特征点测量误差、测量塔上GPS位置标定误差、沉放定位时GPS-RTK的定位误差和姿态传感器测量误差等。
1)测量起算点误差。测量管节顶面特征点测量时采用预制施工控制网的控制点作为起算数据。根据控制网的设计(城市一级控制网),控制网验前单位权中误差m0=2.5 mm。
2)管节特征点的测量误差。此项测量精度实为全站仪测量精度,现场使用的全站仪的有棱镜测距精度为1.5 mm+2 ppm,城市一级控制网平均边长为1 km,故取此项精度误差m1=1.5 mm+(2 ppm×1 km)=3.5 mm。
3)GPS-RTK定位平面位置误差。现场使用的GPS-RTK平面位置动态定位精度(中误差)为10 mm+1 ppm,基站与移动站间距取1 km,故取此项精度误差m2=10 mm+(1 ppm×1 km)=11 mm。
4)仪器架设的对中误差。标定过程中,每个特征点需架设仪器,单次架设仪器的对中误差可控制在2 mm。不同测量方式的仪器架设误差可随机积累,但多次测量时的仪器架设误差可随机减弱,2种方式影响的积累效应基本可以相互抵消,故取仪器架设误差为m3=2.0 mm。
5)GPS位置平面位置测量误差。以上分析的管节沉放的各项误差彼此独立,故塔顶GPS的位置平面位置测量误差


对沉管沉放来说,还需要计算沿隧道轴线和横向的平面位置测量误差,可以认为该误差在隧道纵向方向和横向是一致的,故GPS位置的纵向精度和横向精度

6)倾斜误差。管节沉放时,由塔顶GPS位置换算到对接面位置时需要进行倾斜改正,倾斜改正的角度来自姿态传感器的测量结果,其测角精度为0.01°,最不利情况下,测量塔最远点至管节前端底面角点斜距为32.5 m(实测),其倾斜误差
mQZ=mQH=32.5×0.01×3.14/180×1 000=5.6 mm。
4.2管节沉放高程精度分析
1)管节顶面特征点测量的高程精度。由于沉管在一次舾装区特征点标定时采用二等精密水准测量,故管节顶面的特征点高程精度可以控制在1.0 mm以内。二次舾装区GPS天线高度的量测也可以用全站仪三角高程测量和经过标定的钢尺丈量,其量测精度均可控制在3.0 mm以内。因此,认为管顶特征点及测量塔上的GPS点的高程标定精度mv0=4.0 mm。
2)GPS-RTK定位高程误差。现场使用的GPS-RTK高程动态定位精度(中误差)为20 mm+1 ppm,基站与移动站间距取1 km,故取此项精度误差mv1=20 mm+(1 ppm×1 km)=21 mm。
3)倾斜误差的影响。姿态传感器误差对沉管对接面底部左右两侧点的高程影响最大,最大误差点位于沉管坐标系的Y坐标轴方向上,离开测量塔安装位置最远的点处。
取该点与测量塔的Y坐标差为15.0 m(管节宽度的1/2),姿态传感器的综合测量误差为0.01°,则该位置的姿态传感器误差mv2=15.0×1 000×0.01×3.14/180=2.6 mm。
4.3可视化监测应用成果汇总
截至目前安装完成的E8管节,各管节安装完成后的轴线洞内测量结果见表2。该测量结果表明,按照本工程管节安装轴线±3.5 cm的设计允许偏差,可视化监测系统的精度基本可以达到管节安装精度要求。同时,在管节安装过程中应充分考虑水流冲击、管节制作误差等因素对可视化监测系统精度的影响并按实际工况予以修正。
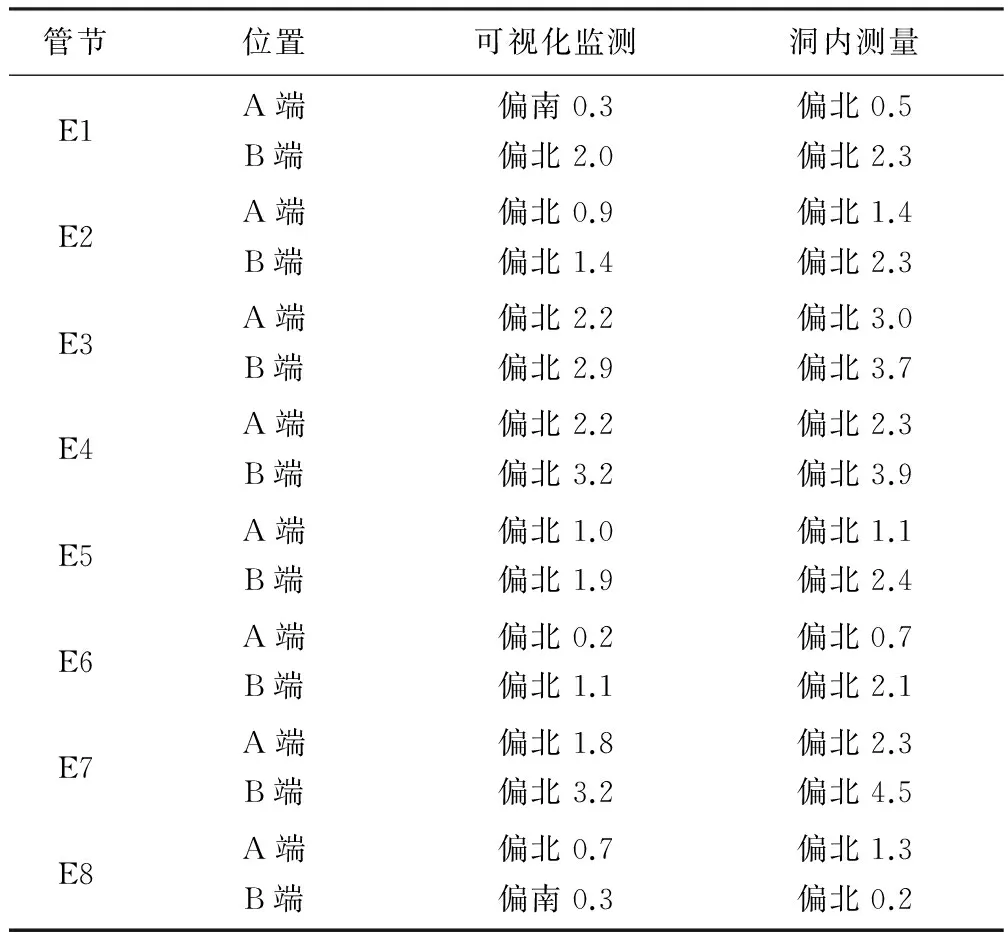
表2 轴线测量数据汇总
5 结论与讨论
相对于常用的全站仪法或GPS法,本工程采用的可视化监测系统有以下特点: 1)在管节沉放测量过程中引入了姿态传感器,对管节横倾引起的测量误差进行了修正,使得测量精度进一步提高。 2)采用了基于数字模型的可视化监测技术,使管节沉放指挥人员可直接根据终端显示的数据及三维模型下达指令,大大提高了管节沉放安装效率,其中E6管节整个安装过程仅耗时6 h。3)采用了全站仪法与GPS法相结合的模式,沉放前期采用GPS法,可实现无人测量; 沉放后期采用全站仪法,测量精度高。4)除沉放后期需要人员操作全站仪跟踪棱镜外,其余全过程均由计算机自动采集及处理数据,并显示至指挥终端,大大减少了测量人员的劳动强度及出错概率。5)可对管节沉放全过程进行自动记录,后期可进行回放,以便于技术人员对管节沉放过程进行分析总结。
由于管节沉放安装容错率低,故在管节靠拢下沉、着地下沉阶段,可采取潜水员探摸测量等辅助措施,对本系统的测量数据进行校核修正。同时,本系统对测量塔的刚度及水深有一定的要求,在水深增大时,测量塔高度也将相应增加,其变形对测量精度的影响也将加大,故应先根据施工实际情况选择全站仪法、声呐法等测量方法,再将测量采集的数据与计算机软件处理相结合,最终形成有针对性的、适用的可视化监测系统。
[1]程乐群,刘学山,顾冲时.国内外沉管隧道工程发展现状研究[J].水电能源科学,2008, 26(2): 112-115,166.(CHENG Lequn, LIU Xueshan, GU Chongshi. Research on development of immersed tunnel engineering at home and abroad[J]. Water Resources and Power, 2008, 26(2): 112-115,166. (in Chinese))
[2]许琛, 王解先,陆彩萍. 沉管沉放的实时监测[J]. 测绘学报, 2002, 31(增刊1): 70-72. (XU Chen, WANG Jiexian, LU Caiping. Real-time surveying of immersed tube[J]. Acta Geodaetica Et Cartographica Sinica, 2002, 31(S1): 70-72. (in Chinese))
[3]丁美, 潘永仁. 沉管隧道测量技术[J]. 现代隧道技术, 2005, 42(1): 11-15. (DING Mei, PAN Yongren. Surveying techniques for an immersed tube tunnel[J]. Modern Tunnelling Technology, 2005, 42(1): 11-15. (in Chinese))
[4]雷巨光. 沉管隧道施工控制测量方法研究[D]. 成都: 西南交通大学, 2010. (LEI Juguang. Research on the method of control surveying in the immersed tube tunnel[D]. Chengdu: Southwest Jiaotong University, 2010. (in Chinese))
[5]任朝军, 吕黄, 苏林王,等. 沉管隧道管节沉放实时定位测量技术现状分析[J]. 现代隧道技术, 2012, 49(1): 44-49. (REN Chaojun, LYU Huang, SU Linwang, et al. The state of real-time positioning measurement technology for immersed tunnels[J]. Modern Tunnelling Technology, 2012, 49(1): 44-49. (in Chinese))
[6]赵坤. 港珠澳大桥沉管隧道测控系统研究[D]. 广州: 华南理工大学, 2015. (ZHAO Kun. Research of the immersed tube tunnel surveying system[D]. Guangzhou: South China University of Technology, 2015. (in Chinese))
[7]成益品. 测量塔定位系统在港珠澳大桥沉管安装中的应用[J]. 中国港湾建设, 2015(7): 36-38. (CHENG Yipin. Application of measuring tower positioning system in Hong Kong-Zhuhai-Macao Bridge immersed tube installation[J]. China Harbour Engineering, 2015(7): 36-38. (in Chinese))
[8]赵思齐. 用于沉管施工的实时定位系统开发及应用[D]. 上海: 同济大学, 2007. (ZHAO Siqi. Realtime positioning system in surveying of immersed tube[D]. Shanghai: Tongji University, 2007. (in Chinese))
Visualized Monitoring Technology for Segment Sinking and Installation of Honggu Tunnel in Nanchang
ZHANG Wei1, ZHANG Yi2, LI Zhijun3
(1.ChinaRailwayTunnelSurvey&DesignInstituteCo.,Ltd.,Tianjin300133,China; 2.GuangzhouSalvageBureau,Guangzhou510260,Guangdong,China; 3.ErchuCo.,Ltd.ofChinaRailwayTunnelGroup,Sanhe065201,Hebei,China)
A visualized monitoring system is used in segment installation of Honggu Tunnel in Nanchang, so as to guarantee the segment installation precision and rapid construction. A visualized model is established according to data collection and process based on total station and GPS. The comparison results between measured data and theoretical calculation ones show that the visualized monitoring system is high-efficient and can meet the segment installation precision and speed up the segment installation of immersed tunnel.
Honggu Tunnel; immersed tunnel; segment sinking; segment installation; visualized monitoring
2016-05-10;
2016-06-25
张伟(1977—),男,河南洛阳人,2002年毕业于长安大学,隧道与地下工程专业,本科,高级工程师,现从事地下工程结构设计工作。
E-mail: 26309996@qq.com。
10.3973/j.issn.1672-741X.2016.09.014
U 45
B
1672-741X(2016)09-1120-05
猜你喜欢
水道港口(2021年6期)2021-01-25
水电站设计(2020年4期)2020-07-16
汽车维修与保养(2020年11期)2020-06-09
工程与建设(2019年3期)2019-10-10
中国惯性技术学报(2017年1期)2017-06-09
科学中国人(2017年24期)2017-01-28
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年9期)2016-04-12
中国港湾建设(2015年11期)2015-01-05
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10