基于滑模双幂次趋近律的轮式机器人轨迹跟踪控制
2016-10-28 14:12郭一军刘胜荣段杏林
温州大学学报(自然科学版) 2016年1期
郭一军,刘胜荣,段杏林
(黄山学院机电工程学院,安徽黄山 245041)
基于滑模双幂次趋近律的轮式机器人轨迹跟踪控制
郭一军,刘胜荣,段杏林
(黄山学院机电工程学院,安徽黄山 245041)
针对轮式移动机器人的轨迹跟踪控制问题,首先,通过对系统运动学的分析建立了跟踪误差模型,然后,采用双幂次趋近律设计了轨迹跟踪滑模控制律.以设计的控制律为控制输入,并在考虑到机器人受到外部干扰的情况下进行了仿真验证,结果表明,所设计的控制律跟踪速度快,抗干扰能力强.
移动机器人;双幂次趋近律;滑模控制;轨迹跟踪
轮式移动机器人应用领域广泛,近年来人们对其轨迹跟踪问题进行了广泛研究,采用的方法主要有鲁棒控制、反演控制、PID控制、模糊控制、自适应控制等.滑模控制作为一种非线性系统的有效控制方法,具有控制器参数选择方便、对系统参数变化和外界干扰不敏感等特点.文献[1]针对焊接移动机器人的高精度焊接问题,采用滑模控制提出一种能够实现高精度焊接的新型控制算法;文献[2]以差分驱动的温室移动机器人为研究对象,提出一种新的加权积分型增益趋近律的滑模控制方法,用以解决移动机器人的轨迹跟踪问题;文献[3]针对欠驱动轮式移动机器人的轨迹跟踪问题,采用滑模控制和反馈线性化技术提出一种鲁棒轨迹跟踪控制器.为了使机器人的轨迹跟踪控制方法更适合于工程应用,提高跟踪系统的收敛速度和精度,受文献[1-4]的启发,本文采用双幂次趋近律的滑模控制技术来设计轨迹跟踪控制器,所设计的趋近律由两部分构成,一部分用于提高系统的收敛速度,另一部分用于抑制系统抖震.仿真结果表明,相比于其它滑模控制趋近律,双幂次趋近律具有更好的动态品质,不仅可使系统快速收敛,而且能够有效抑制抖震现象的产生,所设计的控制器能够克服未知干扰的影响,提高轨迹的跟踪精度.
1 问题描述
本文以双轮差分驱动的移动机器人为研究对象,其几何结构示意图见图1.为了方便建立轨迹跟踪误差模型,本文假设跟踪机器人R1的参考轨迹由一虚拟机器人R2生成,这样轨迹跟踪问题就转化为设计控制器使得跟踪机器人的输出轨迹能够实时地跟上虚拟机器人生成的轨迹.跟踪机

对上式求导可得轨迹跟踪运动学误差模型:

式中, v, w为跟踪机器人的平移速度和旋转速度,在运动学误差模型中它们是控制量,vr, wr为虚拟机器人的平移速度和旋转速度.
2 轨迹跟踪控制器设计
对于轮式移动机器人这样的欠驱动非线性系统,滑模控制是一种有效的控制方法,该方法设计步骤可分为两步:1)滑模控制切换面的设计.切换面可表示为系统状态的线性或非线性函数,系统状态到达切换面以后,便处于滑动模态,其滑模运动完全由切换面方程()0s x=决定,此时系统对参数变化和外部干扰表现出很强的鲁棒性;2)滑动模态趋近律的选择.选择不同的趋近律,系统状态在由切换面外部向切换面运动时表现出的趋近特性会有很大不同.本文采用双幂次趋近律.
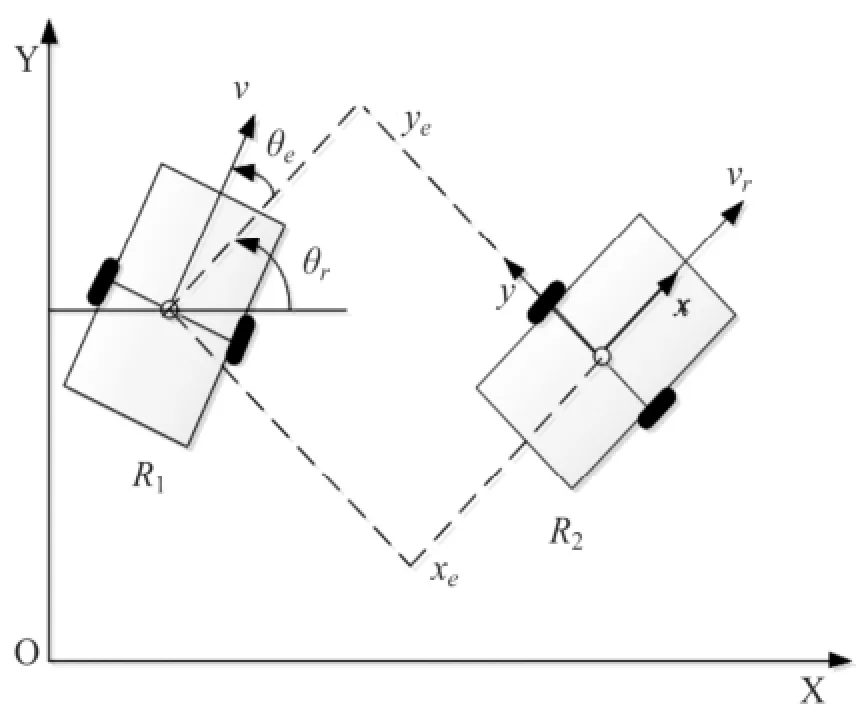
图1 跟踪位姿误差几何表示
为了得到使系统误差向量收敛于零的控制律,首先设计滑模切换面:



求导后可得:然后取趋近律为双幂次趋近律[6]:式中,a>0,b>0,0<α<1,β>1.当系统状态趋近滑模面时,项起主导作用,当系统状态远离滑模面时,项起主导作用,通过趋近律中两项的相互配合使系统的趋近过程具有较好的动态特性.
在设计好切换面和趋近律后,将式(5)代入式(6)中可得:

最后可得滑模控制律:

在控制律 ,v w的作用下,可使式(2)描述的误差系统渐进稳定.详细证明过程参见文献[6].
3 仿真结果与分析
为了验证以上所设计控制律的有效性,本文利用Simulink对移动机器人的轨迹跟踪进行了仿真研究.给定参考轨迹为圆轨迹,设定虚拟机器人的控制输入为vr=4m/ s,ωr=1rad/ s ,起始位姿态为pr(0)=[0 0 0],跟踪机器人的起始位姿为p (0)=[0.6 0.4π/5],控制器参数选择为:c1=1,c2=2,c11=0.09,c22=0.05,a1=0.5,β1=2,a2=1/3,β2=1.
考虑在反馈通道叠加零均值高斯白噪声信号,仿真结果如图2、图3和图4所示.
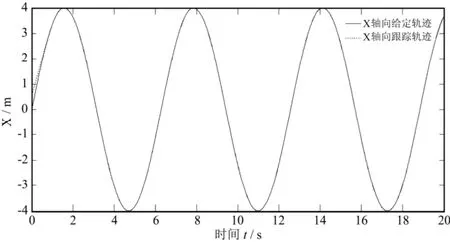
图2 X轴向轨迹跟踪效果
图2和图3分别是跟踪机器人为了走出圆轨迹在X轴和Y轴方向的轨迹跟踪情况,从跟踪结果可见,该控制律在系统存在初始误差和外部干扰的情况下表现出较好的鲁棒性.图4为机器人轨迹跟踪情况在惯性坐标系中的描述,从图中可以看出,跟踪机器人在双幂次滑模控制律的作用下,在较短时间内收敛到给定圆轨迹,从而表明所设计的控制律在非完整约束移动机器人的轨迹跟踪控制中具有快速性和很好的鲁棒性.
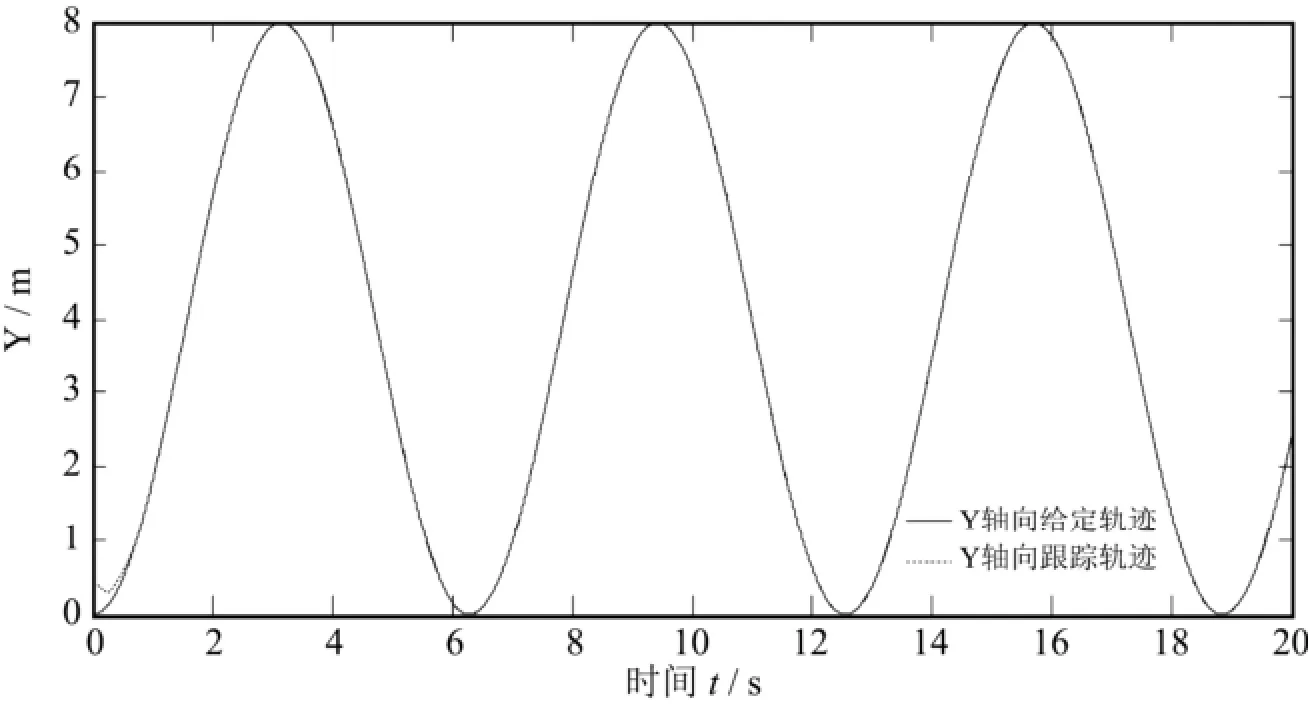
图3 Y轴向轨迹跟踪效果
4 结 语
本文研究了非完整约束移动机器人的轨迹跟踪问题.基于机器人的运动学误差模型,利用双幂次趋近律的滑模控制技术设计出具有全局渐稳的双幂次滑模轨迹跟踪控制律.与传统的滑模控制技术相比,双幂次趋近律滑模控制技术不仅可以有效地减弱系统的抖振现象,而且还可使系统误差状态不管是在远离滑动模态还是趋近于滑动模态下都有较好的响应速度.仿真结果表明,该控制器系统响应速度快、稳态跟踪精度高、对外界干扰变化不灵敏、具有很好的鲁棒性能,完全符合移动机器人对于期望轨迹的跟踪要求.
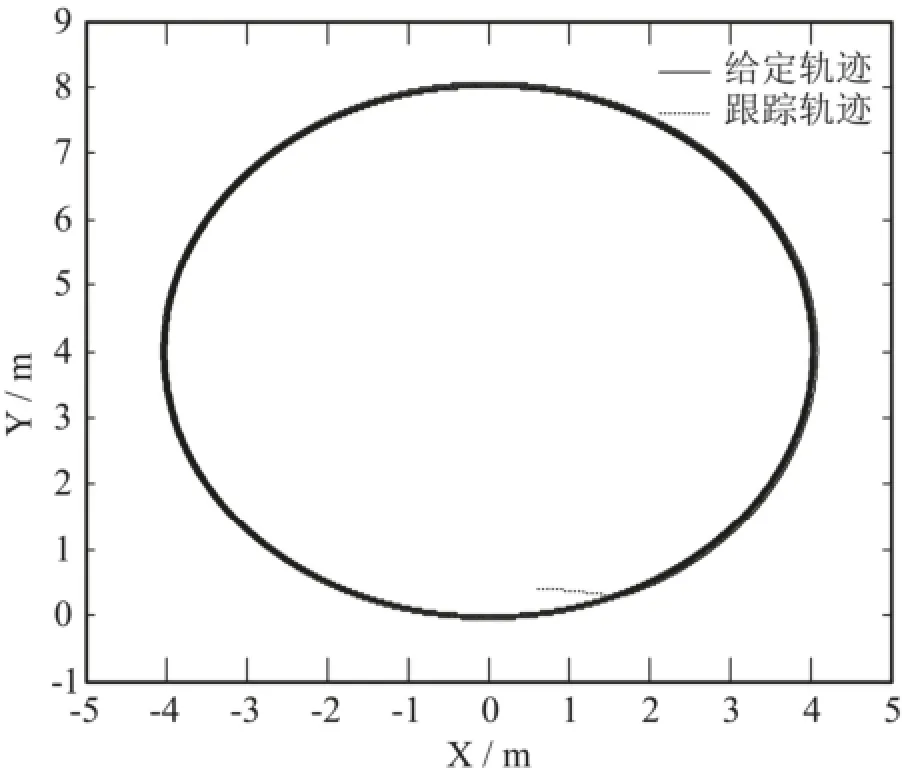
图4 移动机器人对圆轨迹的跟踪效果
[1] 吕学勤, 张轲. 移动焊接机器人轨迹跟踪控制机制及实验[J]. 上海交通大学学报, 2015, 49(3): 371-374.
[2] 牛雪梅, 高国琴, 鲍智达, 等. 基于加权积分增益的温室移动机器人滑模控制研究[J]. 控制工程, 2013, 20(6): 1207-1211.
[3] Yang J M, Kim J H. Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots [J]. Robotics and Automation, IEEE Transactions on Robot, 1999, 15(3): 578-583.
[4] Hwang C L, Wu H M. Trajectory tracking of a mobile robot with frictions and uncertainties using hierarchical sliding-mode under-actuated control [J]. IET Control Theory and Applications, 2013, 7(7): 952-965.
[5] Siciliano B, Khatib O. Handbook of Robotics [M]. Berlin: Springer-Verlag, 2008: 805-810.
[6] 张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2): 289-292.
(编辑:王一芳)
Trajectory Tracking Control of Wheeled Mobile Robots Based on Sliding-mode Control with Double-power Reaching Law
GUO Yijun, LIU Shengrong, DUAN Xinglin
(College of Electro Mechanical Engineering, Huangshan University, Huangshan, China 245041)
Absturct:The author raises the question towards the trajectory tracking tfor he wheeled mobile robors in this paper. Firstly, the tracking error model is established by analysis of the system kinematics; Secondly, the trajectory tracking sliding mode control law is designed by means of the double-power reaching law; Finally, the emulation proof is made under the condition that the robots are interfered from the external disturbance. It turns out that the designed control law is characteristic of fast tracking velocity and powerful antijamming capability.
Mobile Robot; Double Power Reaching Law; Sliding Mode Control; Trajectory Tracking
TP24
A
1674-3563(2016)01-0058-05
10.3875/j.issn.1674-3563.2016.01.008 本文的PDF文件可以从xuebao.wzu.edu.cn获得
2015-05-14
安徽省高校自然科学基金资助项目(KJHS2015B11)
郭一军(1977- ),男,浙江兰溪人,讲师,硕士,研究方向:自动化器人的位姿在惯性坐标系XOY下可表示为向量[x yθ],其中, x, y为其质心在惯性坐标系下的坐标,θ为其航向角,即机器人瞬时前进方向与X轴的夹角,虚拟机器人的位姿在惯性坐标系下可表示为向量.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军民两用技术与产品(2021年10期)2021-03-16
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
制造技术与机床(2018年8期)2018-10-09
中国军转民(2018年1期)2018-06-08
制造技术与机床(2017年3期)2017-06-23
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
筑路机械与施工机械化(2014年7期)2014-03-01