基于DSP的无刷直流电机新型转矩脉动抑制策略
2016-10-28 03:14吴善强郑耿峰
计算机测量与控制 2016年7期
吴善强,金 超,程 楠,郑耿峰
(1.中国计量学院 机电工程学院,杭州 310018; 2.福建省特种设备检测研究院,福州 350008)
基于DSP的无刷直流电机新型转矩脉动抑制策略
吴善强1,金 超1,程 楠1,郑耿峰2
(1.中国计量学院 机电工程学院,杭州 310018; 2.福建省特种设备检测研究院,福州 350008)
无刷直流电机在换相时,非换相相绕组电流会产生脉动,绕组电流的脉动会引起输出转矩的脉动;研究无刷直流电机换相转矩脉动问题,是为了获得无刷直流电机更优的转矩输出特性,提高控制系统的稳定性和控制精度;通过分析换相转矩脉动的成因,在传统PWM_ON_PWM三相全桥调制方式的基础上,加入新型相电流预测控制算法,调节关断相和开通相电流下降和上升的速率,从而抑制相电流的脉动;利用DSP实现算法,验证了算法的可行性,通过实验数据和波形的对比分析,PWM_ON_PWM调制策略与电流预测算法相结合的控制算法可以有效抑制换相引起的转矩脉动。
转矩脉动;调制;电流预测算法;DSP;策略
0 引言
无刷直流电机具有调速性能好、噪音小、效率高等优点,广泛应用于汽车行业、工业机器人、精密电子仪器等对电机控制精度高的场合[1]。
方波控制的无刷直流电机,当采用两两换相六状态控制方式时,由于关断相电流下降速率和开通相电流上升速率不一致,导致非换相相电流脉动,从而导致电机转矩脉动,影响电机的性能[2-4]。
抑制转矩脉动是提高无刷直流电机控制性能的关键因素。无刷电机绕组相当于电感,三相绕组的电感不是绝对相等,电机在换相的工作过程中,导致电机转矩脉动,这种转矩脉动可以通过相关策略和算法进行抑制。无刷直流电机换相引起的转矩脉动抑制方法很多,主要有母线电压控制法,但增加了硬件成本[5];电流谐波抑制法,但是计算方法复杂[6];改进的电压滞环PWM法,适合高速控制系统[7];PWM_ON_PWM调制法,能够有效抑制转矩脉动[8]。本文在传统的PWM_ON_PWM全桥调制的基础上,在引入电流预测控制算法,进一步抑制换相引起的转矩脉动。
1 换相转矩脉动过程分析
无刷直流电机电磁转矩公式为:
(1)
无刷直流电机的控制采用两两导通六状态的方式,任一时刻只有两相绕组导通,故式(1)可化简为:
(2)
式中,Cm为电磁转矩常数,从式(2)可知,电机稳态时,电机转速Ω恒定不变,反电动势幅值E恒定不变,那么转矩是否发生脉动,只需看相电流是否发生脉动。

图1 三相全桥电路
如图1所示的三相全桥电路,设电机处于稳态,速度一定,反电动势为理想梯形波,以A相和C相导通换相到B相和C相导通为例说明相电流脉动情况。换相前Q1和Q6管开通,电机A相和C相导通,换相后Q3和Q6管开通,电机B相和C相导通。换相前电压平衡方程为:
(3)
由A相到B相的换相过程中,续流回路电压平衡方程为:
(4)
导通回路电压平衡方程为:
(5)
三相绕组瞬时电流满足如下关系:
(6)
(7)
联立式(3)~(7),解微分方程组,换相期间续流回路电流ia为:
(8)
式中,I0为稳态时相电流幅值。
换相过程中导通回路电流ib为:
(9)
虽然假设电机反电动势为理想梯形波,换相期间电机转速一定,但是由于电机绕组电阻、电感、互感都不是绝对相等,故换相期间,关断相电流变化量Δia和开通相电流变化量Δib不相等,导致关断相从开始关断到完全关断的时间toff与开通相从开始开通到完全开通的时间ton不相等。由于非换相相电流ic为:
(10)
式中负号代表方向,由于关断相和开通相电流变化速率不相等引起非换相相电流的脉动,进而引起转矩脉动。由式(8)和(9)可知,换相期间关断相和开通相电枢电流都是以e为底的指数函数,换相期间三相电流变化可分为以下3种情况:

图2 Δia=Δib时C相电流无脉动
第一种情况三相电流波形示意图如图2所示,此时Δia=Δib,ia和ib的变化速率大小相等,即下降的ia恰好由上升的ib补偿,所以非换相相电流ic的大小不会发生变化。这种情况只有在电机三相电阻R、三相电感L和互感M均相等的情况下才会出现,而实际中不会出现这种情况。
第二种情况三相电流波形示意图如图3所示,此时Δia<Δib,ia下降的速率小于ib上升的速率,即关断相A相电流下降地慢,开通相B相电流上升地快,那么ia和ib之和会增大,所以非换相相电流ic会出现向上凸起的现象。
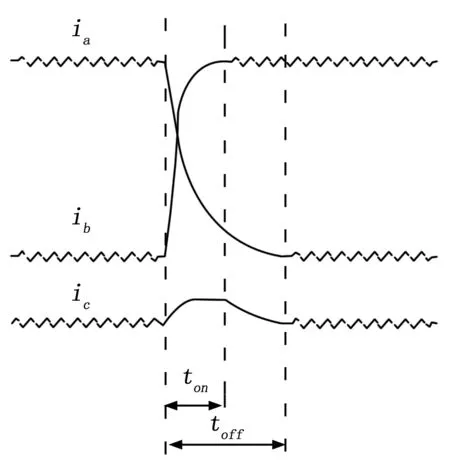
图3 Δia<Δib时C相电流向上凸起
第三种情况三相电流波形示意图如图4所示,此时Δia>Δib,ia下降的速率大于ib上升的速率,即关断相A相电流下降地快,开通相B相电流上升地慢,那么ia和ib之和会减小,所以非换相相电流ic会出现向下凹陷的现象。
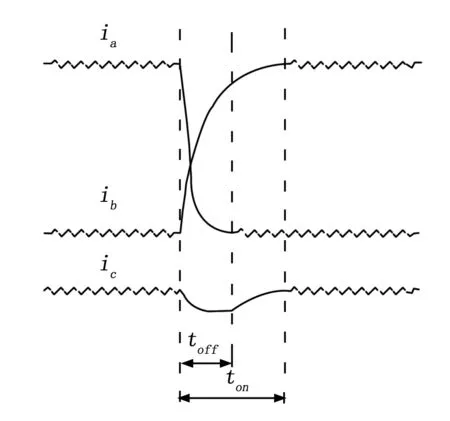
图4 Δia>Δib时C相电流向下凹陷
由上述分析可知,在电机换相时,相电流会发生凹陷或凸起脉动。如图5所示为示波器观测的相电流波形,图6为电流脉动的局部放大图,在120°导通角的中间部位,即换相的瞬间出现电流的凹陷或凸起脉动。由式(2)知稳态时转矩Tem与相电流幅值I成比例关系,所以电流的脉动会直接导致电机输出转矩的脉动。

图5 相电流波形

图6 相电流脉动放大波形
2 相电流预测控制算法的设计与实现
2.1 相电流检测电路设计
为了便于DSP的AD口和示波器对相电流进行采样和观测,需要搭建相电流检测电路,将电流信号转化成电压信号。从小电流检测和节约成本的角度考虑,利用检流电阻对相电流进行检测最为合适。以A相电流的检测电路为例,如图7所示,将检流电阻RS串到A相绕组上,当绕组有电流流过时,检流电阻上会产生压降,然后通过差分运放电路将小信号放大到合适的范围。图7电路中电阻满足Rf/R1=R3/R2,故输出电压VOUT与绕组电流ia满足下面关系:
(11)
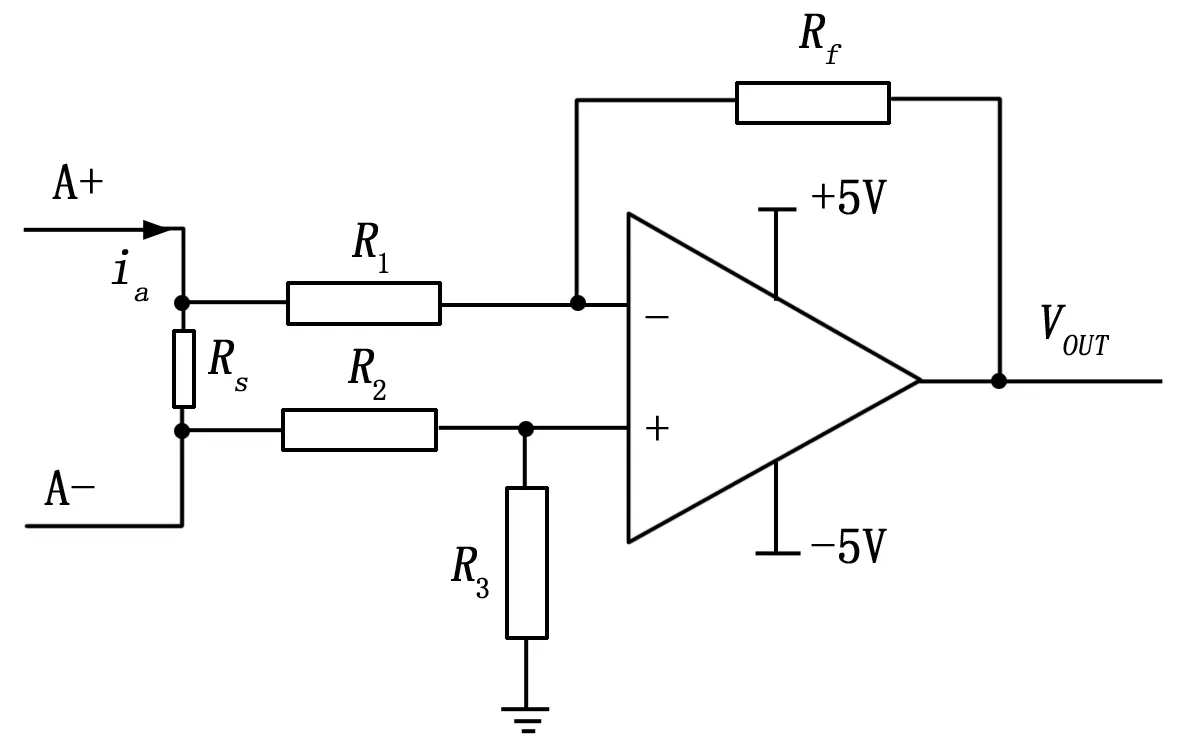
图7 相电流差分放大电路
由于VOUT输出的是正负交流信号,而DSP的AD口只能采样0~3 V的电压信号,所以还要将交流的电压信号偏置到0~3 V的范围内。如图8所示为电压抬升电路,输入到DSP AD口的电压VAD与VOUT的关系如下:
(12)

图8 电位抬升电路
2.2 控制算法原理
如图9的示意图,三相全桥采用的是PWM_ON_PWM调制方式,图9中换相的短时间被称作换相区,其为电流预测控制的作用时间,在每个换相时刻,都进行电流预测控制。
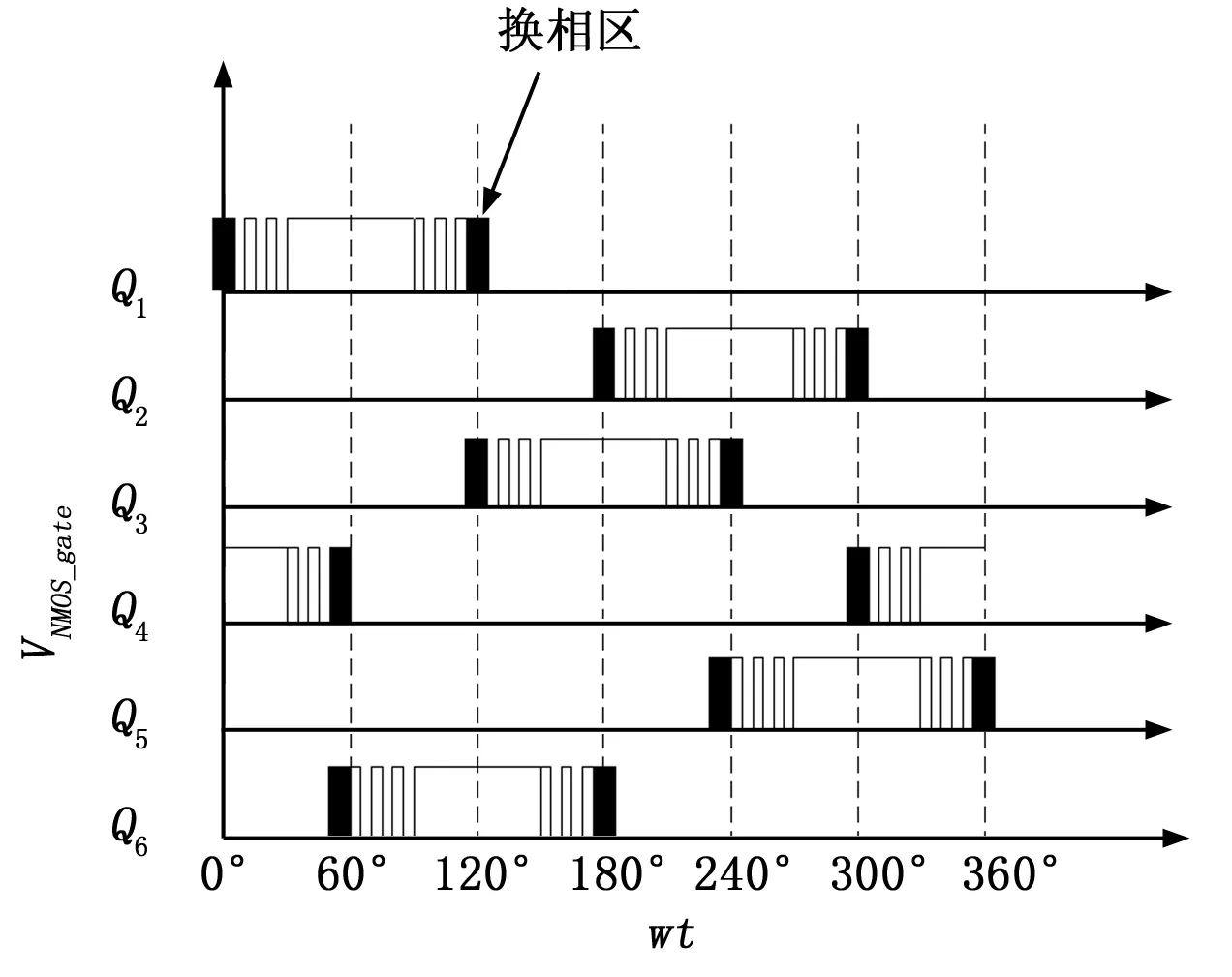
图9 电流预测算法作用区域示意图
如图10所示为电流预测算法示意图,假定某一换相时刻,A相为关断相(Q1逐渐关断),其换相期间的占空比用Da表示,B相为开通相(Q3逐渐开通),其换相期间的占空比用Db表示,C相是非换相相(Q6状态不变,保持恒通)。
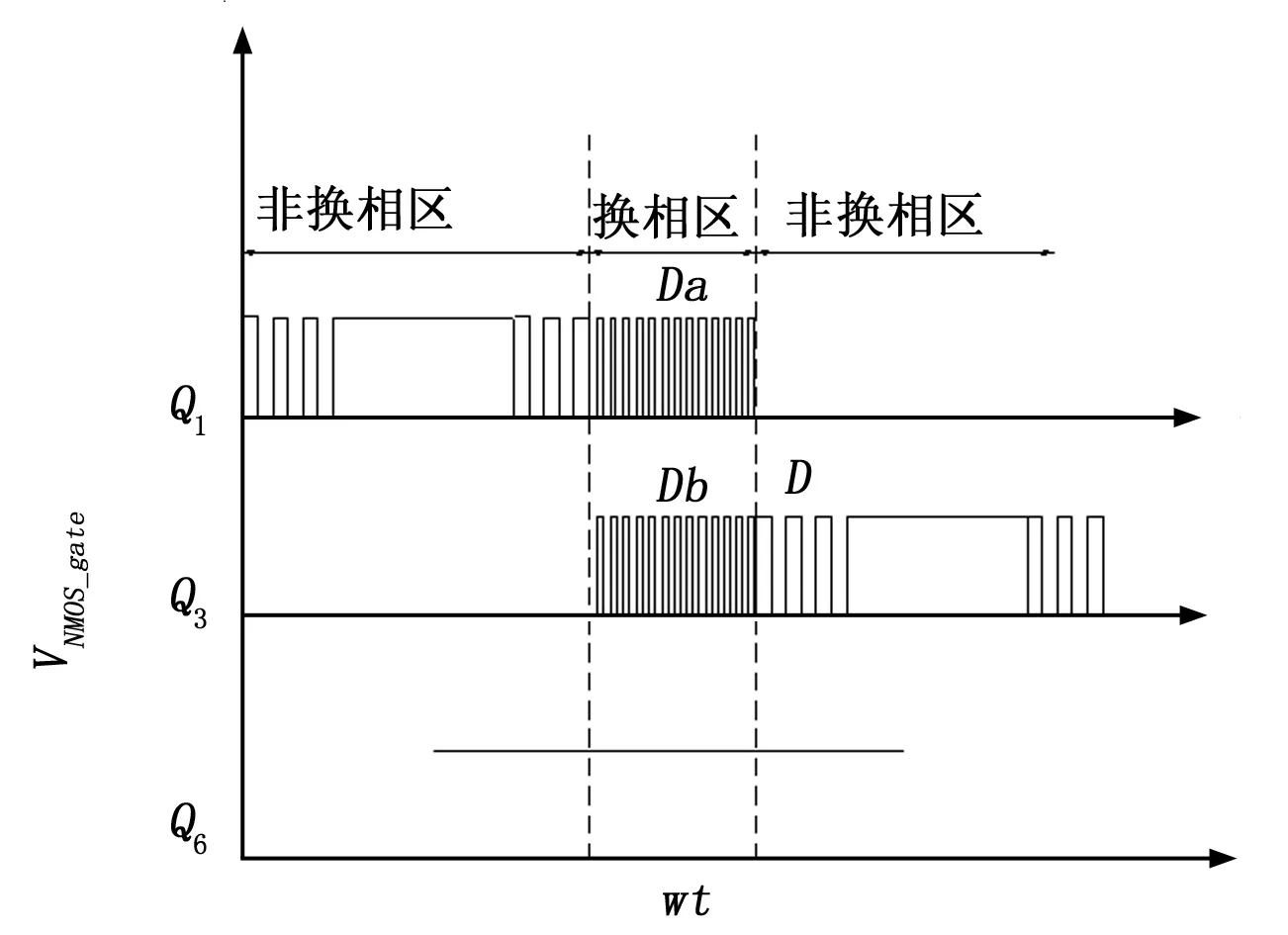
图10 电流预测算法示意图
换相期间存在以下电压平衡方程:
(13)
(14)
(15)
中心点电压可通过式(13)~式(15)得到:
(16)
式(16)分别与式(13)和(14)相减,建立Da、Db和三相电流之间的关系如下:
(17)
(18)
电机三相为星形接法,根据基尔霍夫电流定律,三相绕组的电流满足:
ia+ib+ic=0
(19)
又得到:
(20)
换相时,根据式(17)和式(20)可以得到如下等式:
(21)
将式(21)进行离散化得到:
(22)
同理得到:
(23)
式(22)和式(23)即为相电流预测控制算法表达式,式中T为相电流的采样周期,i*(k+1)为(k+1)时刻的电流值,也就是速度调节器输出的给定电流值;i(k)是非换相相在k时刻的电流值,可以通过采样得到。此电流预测控制的思想在于,在k时刻,在关断相A和开通相B之间施加式Da(k)和Db(k)的占空比时,就能够使得在下一个周期即(k+1)时刻非换相相C上的电流值为i*(k+1)。
2.3 控制算法的实现
由前述分析可知,关键是要知道换相期间施加于关断相和开通相的占空比Da和Db。对式(10)求导得相电流的斜率表达式为:
(24)
根据式(17)、式(18)和式(24)得占空比Da和Db的关系为:
(25)
将式(25)离散化得到:
(26)
在换相过程中,在开通相和关断相上施加式(26)的占空比调制,就可以抑制非换相相电流脉动,从而减小换相期间的转矩脉动。为了保证程序连续性,开通相在换相区的占空比与在非换相区的占空比抑制,即Db(k)=D,再根据式(26)计算得到Da(k),式(26)中的反电动势幅值E可根据电机转速计算。
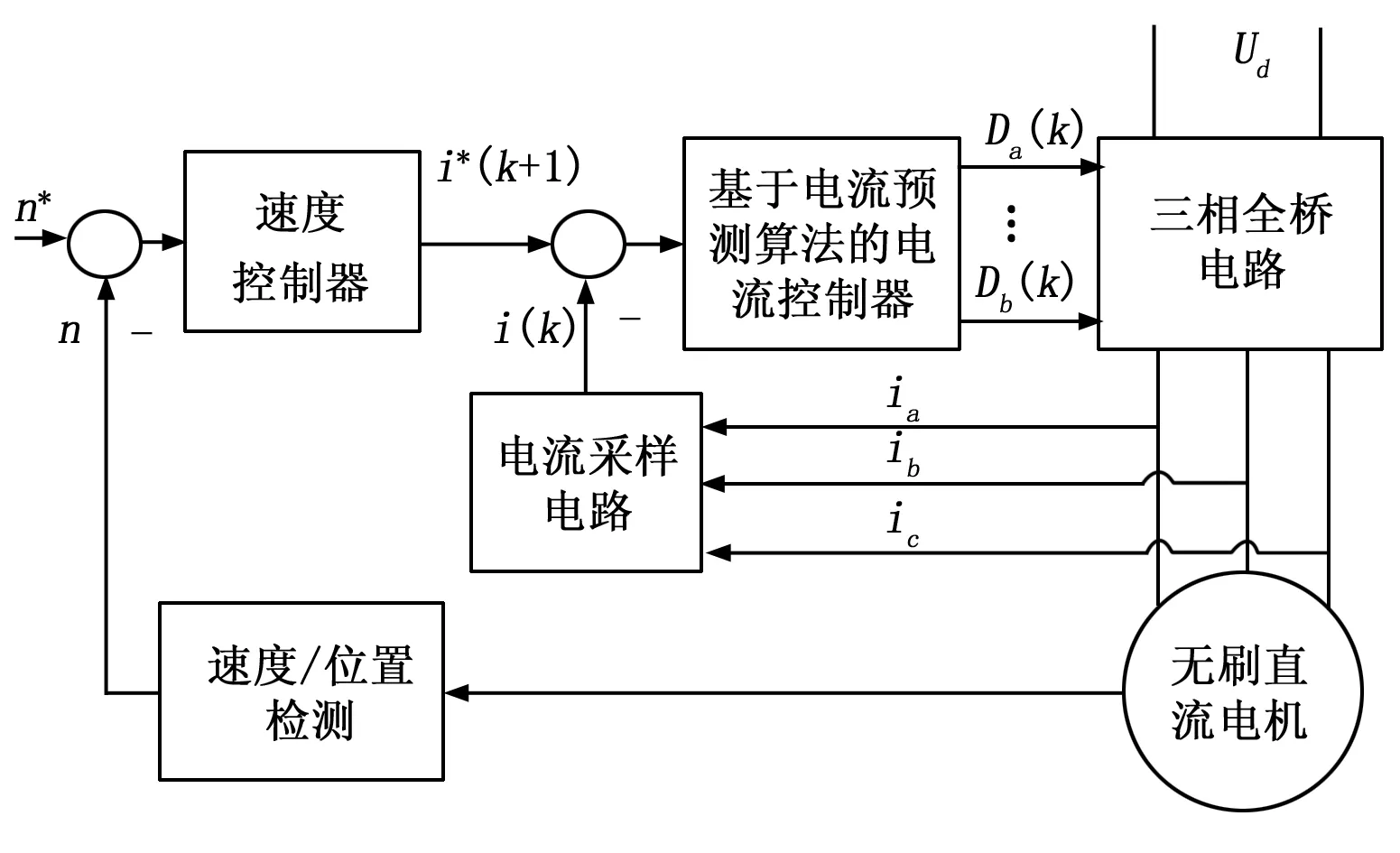
图11 电流预测算法系统框图
如图11所示为电流预测算法系统框图,计算方法可按以下步骤进行(以A相关断,B相开通为例,其他换相情况类似):
(1)i*(k+1)是速度控制器的输出值,i(k)是通过DSP采样的当前非换相相的电流。
(2)再根据电流预测控制的离散表达式计算Da(k)和Db(k)。
(3)在换相区内,对电机开通相和关断相施加占空比为Da(k)和Db(k)的PWM进行调制。
控制算法利用TI公司的C2000 DSP来实现,此DSP主频为150 MHz(最小时钟周期为6.67 ns),2个事件管理器、5个定时器和96个中断极大满足了控制算法的开发。
3 实验结果分析
如图12所示是仅使用PWM_ON_PWM调制方式下DSP采样的三相电流波形,可见在换相期间,C相电流仍有较大脉动。
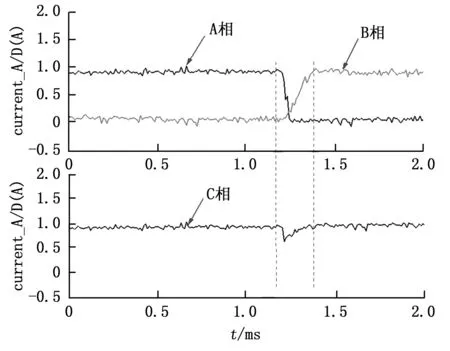
图12 无电流预测算法三相电流采样波形
如图13所示为加入电流预测算法后DSP采样的三相电流波形,很明显关断相A的电流下降速度变慢,那么C相电流脉动减小,转矩脉动得到有效抑制。

图13 电流预测控制下相电流采样波形
在PWM_ON_PWM调制方式下,用示波器观测有无电流预测算法情况时,相电流波形和非换相相MOS管栅极的调制波形,如图14为无电流预测算法时相电流和调制波形,图15所示为有电流算法时相电流和调制波形,测试均在电机转速3 000 r/min下完成。

图14 无电流预测算法波形 图15 有电流预测算法波形
从测试波形可知,PWM_ON_PWM调制策略下加入电流预测算法,相电流脉动会得到明显抑制。
电机工作在3 000 r/min,通过采样相电流,根据式(2)计算电磁转矩,如图16和图17所示,对比无电流预测算法和加入电流预测算法对转矩脉动的影响,很明显PWM_ON_PWM调制方式与电流预测算法相结合,换相引起的转矩脉动得到明显抑制,经计算转矩脉动比可以被抑制到5%以内。

图16 无电流预测算法电磁转矩波形
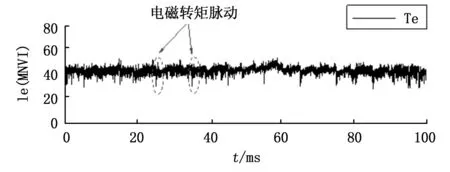
图17 有电流预测算法电磁转矩波形
4 结束语
基于DSP的无刷直流电机新型转矩脉动抑制策略,分析了换相转矩脉动的形成原因,并且结合国内外转矩脉动抑制策略研究,设计相电流采样电路,提出PWM_ON_PWM与电流预测算法相结合的控制算法。利用示波器、DSP进行相关实验测试,采样对比了在PWM_ON_PWM调制方式下,无电流预测算法和加入电流预测算法时电机转矩脉动情况。显然单独使用PWM_ON_PWM调制策略转矩脉动仍然较大,在PWM_ON_PWM调制方式下结合电流预测算法能够将转矩脉动抑制到理想的范围内。
[1] 周 杰, 侯 燕. 无刷直流电机转矩脉动抑制方法综述[J]. 机床电器. 2007, 34(6): 5-8.
[2] Zeroug H, Boukais B, Sahraoui H. Analysis of torque ripple in a BLDCM[J]. IEEE Transactions on Magnetics, 2002, 38(2): 1293-1296.
[3] 张相军, 陈伯时. 无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J]. 电机与控制学报, 2003,7(2): 87-91.
[4] Zhang L, Qu W L. Commutation Torque Ripple Restraint in BLDC Motor over Whole Speed Range[A]. Proceeding of the Eighth International Conference[C]. 2005, 27(2): 1501-1506.
[5] Zhang X F, Lu Z Y. A new BLDC motor drives method based on BUCK converter for torque ripple reduction[A]. The 5th Power Electronics and Motion Control Conference[C]. Shanghai, China, 2006, 3: 1-4.
[6] N’diaye A, Espanet C, Miraoui A. Reduction of the torque ripples in brushless PM motors by optimization of the supply-theoretical method and experimental implementation[A]. Industrial Electronics, 2004 IEEE International Symposium[C]. France, 2004, 2: 1345-1350.
[7] Ge Xin, Han Guangxian, Cheng Zhi. Research of cogging torque in the brushless DC motor with fractional ratio of slots and poles[A]. 12th Biennial IEEE Conference[C]. 2006, pages: 241-241.
[8] 揭贵生, 马伟明. 考虑换相无刷直流电机脉宽调制方法研究[J]. 电工技术学报, 2006, 20(9): 66-71.
New Torque Ripple Suppression Strategy for Brushless DC Motor Based on DSP
Wu Shanqiang1, Jin Chao1, Cheng Nan1,Zheng Gengfeng2
(1.China JiLiang University, Hangzhou 310018, China;2.Fujian Provincial Academy of Measurement and Test of Special Equipment,Fuzhou 350008,China)
The current of the non commutation phase will ripple when brushless DC motor commutates. The ripple of the phase current must cause the ripple of the torque.In order to obtain better brushless DC motor torque output characteristics, research of torque ripple for brushless DC motor is necessary.That can improve the control stability and precision of the system. Through the analysis of the reason of the torque ripple, joining the current predictive control algorithm on the basis of traditional PWM_ON_PWM modulation regulate current increase and decrease rate of off phase and open phase.Which can suppress the phase current ripple.Finally using the DSP implement such algorithm and verify the feasibility of the algorithm. Combining PWM_ON_PWM modulation strategywith the current prediction algorithm can effectively suppress commutation torque ripple by comparing the experimental data and waveform analysis.
torque ripple; modulation; current prediction algorithm;DSP; strategy
2016-01-13;
2016-03-07。
浙江省自然科学基金资助项目(LY14E050022,LY14F030021)。
吴善强(1977-),男,浙江义乌人,副教授,硕士研究生导师,主要从事爬壁机器人、电机运动控制等方面的研究。
1671-4598(2016)07-0113-04
10.16526/j.cnki.11-4762/tp.2016.07.030
TP301.2;U621.3 文献标识码:A
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国特种设备安全(2022年3期)2022-07-08
微电机(2022年1期)2022-03-21
电子与封装(2021年7期)2021-07-29
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
舰船科学技术(2015年8期)2015-02-27
电测与仪表(2014年21期)2014-04-04
地震研究(2014年1期)2014-02-27