半潜式钻井平台锚泊定位锚链张力优化
2016-10-28 03:14石建峰陈红卫
计算机测量与控制 2016年7期
石建峰,陈红卫,王 莉
(江苏科技大学 电子信息学院,江苏 镇江 212003)
半潜式钻井平台锚泊定位锚链张力优化
石建峰,陈红卫,王 莉
(江苏科技大学 电子信息学院,江苏 镇江 212003)
半潜式平台长期在海洋上生产作业时,为了防止其在外界环境风、浪、流的干扰下发生漂移,通过锚泊定位控制平台使其始终在安全范围内工作;当锚泊系统平台某角某一根或多根锚链张力过大或过小时,就会造成锚链因疲劳而断裂及能量的浪费;为充分发挥所有锚链的能力,使各锚链张力值尽量接近,对锚泊定位锚链张力进行研究;在遗传算法的基础上结合非线性规划算法进行锚链张力优化,结合两种算法的优点让优化结果具有更高的精度;最后,应用所建立的数学模型在Matlab/Simulink仿真环境下对981钻井平台进行仿真试验,仿真结果表明能在满足锚链张力均衡分布的情况下充分满足平台的作业要求,保证海洋平台工作的安全性。
深水半潜式平台;锚泊定位;数学建模;遗传算法;仿真
0 引言
南海海洋环境极端复杂恶劣,半潜式钻井平台满足了我国南海深海油气资源开发的需求,它抗风浪能力突出、甲板空间大,适用水深范围广。一般在1 500米以内的深海区,半潜式平台通过锚泊定位在特定海域进行作业。半潜式平台锚泊系统,通过用锚及锚链、锚缆将平台系于海上,从而限制由风浪流引起的漂移,使其保持在预定位置上。
以工作在我国南海海域的981深水半潜式钻井平台作为研究对象[1-3],它具有石油天然气勘探、海底钻井等多种功能,最大作业水深达1 500米深,981半潜式钻井平台主要结构由四大部分组成:上层甲板、4个立柱、4个横撑和2个浮体,主要参数如表1所示。锚泊系统锚链的布置方式如图1所示,12锚缆成对称式布置,一共4组,每组3根。
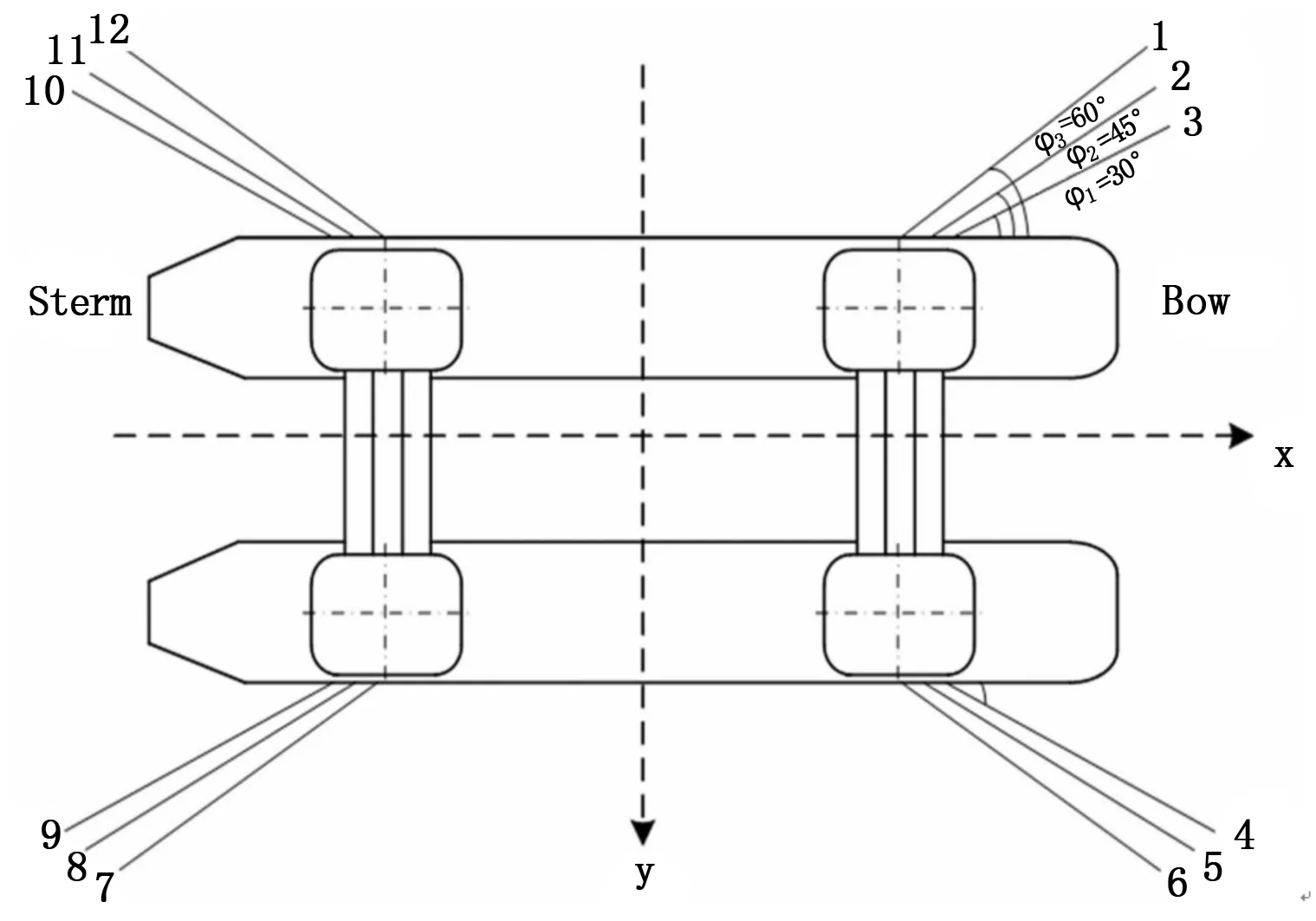
图1 平台系泊系统布置
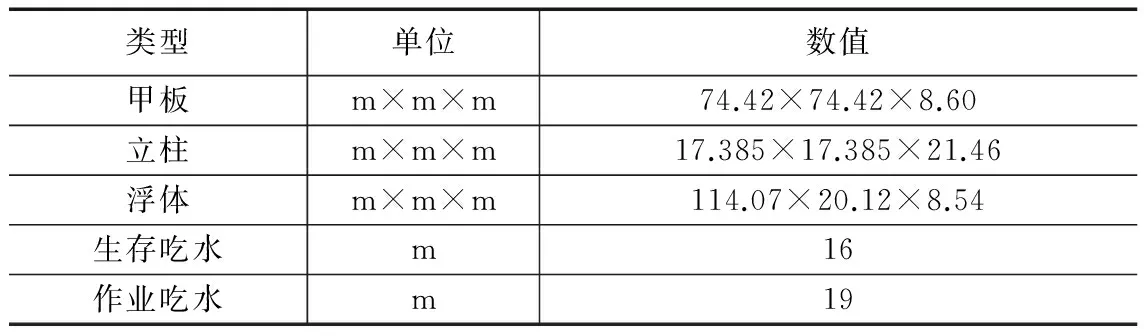
类型单位数值甲板m×m×m74.42×74.42×8.60立柱m×m×m17.385×17.385×21.46浮体m×m×m114.07×20.12×8.54生存吃水m16作业吃水m19
1 数学建模
1.1 平台系统数学建模
半潜式平台在海上的运动是六自由度运动,在锚链张力优化研究中仅考虑纵向、横向和艏摇三自由度水平面运动,简化后的半潜式平台近似低频运动数学模型为[4-6]:

式中,R(ψ)为转换/旋转矩阵;v=[u,v,r]T为运动坐标系下纵荡、横荡和摇艏的速度;η=[x,y,ψ]T为固定坐标系下纵荡、横荡和摇艏值;M为惯性矩阵(M=MA+MRB),包括附加质量和附加惯性矩阵;D为阻尼矩阵;τ为钻井平台所受的外力,包括风、流、和二阶波浪漂移作用引起的环境干扰力、锚链的张力。矩阵MRB、MA、D的组成形式如下:
1.2 环境载荷建模
1.2.1 风载荷
风载荷的建模研究比较成熟,作用于平台上所产生的风力和风力矩为[4]:
(2)
其中:Xwind,Ywind,Nwind分别为风干扰下产生的纵荡力、横荡力及艏摇力矩;ρa为空气密度;VW为海面以上10 m的平均风速;CX(γw),CY(γw),CN(γw)分别为纵荡、横荡方向的风力系数和艏摇方向的风力系数,采用OCIMF的风力系数和风力距系数数值[7];AT和AL为平台水面以上部分的纵向截面积的总和及横向截面积的总和。L为平台的总长。
1.2.2 流载荷
海流对平台的作用力和力矩建模为[4]:
(3)
其中:Xcurrent,Ycurrent,Ncurrent分别表示海流干扰作用到被控平台上产生的纵荡力、横荡力和艏摇力矩;ρ为海水密度取1.025 kg/m3;Vc海流流速;L为被控平台总长;Aγ和AL分别为海面以下部分的纵向截面积的总和及横向截面积之和。CX(β),CY(β),CN(β)分别是平台的纵荡力系数,横荡力系数以及艏摇力矩系数[7]。
1.2.3 二阶波浪力
二阶波浪力是波浪作用于钻井平台使其缓慢偏离原来位置的力,在研究平台的低频响应时必须对二阶波浪力加以控制。
二阶波浪力通过经验公式计算[4]:
(4)
其中:Xwave,Ywave,Nwave分别表示纵荡、横荡和艏摇干扰力/力矩;ξ为平均波幅;Cxw,Cyw,Cnw分别为纵向力漂移系数、横向力漂移系数和艏摇漂移系数[7];ρ为海水密度;g为重力加速度;L为平台的平台长度;α为波浪与半潜式钻井平台中线面的夹角。
2 锚泊定位系统张力优化
2.1 最优控制策略模型
海上半潜式钻井平台进行作业时,其锚泊系统所有锚链共同作用来平衡环境载荷及其产生的外力矩;为防止单根或多根锚链因疲劳使用而断裂,同时又充分发挥所有锚链的能力,各锚链张力值应尽量接近[8-10]。
设定目标函数为任意锚链之间张力差的平方和最小来达到张力优化目的,建立规划模型[11-12]:
(5)
为了防止平台在环境载荷作用下发生慢漂运动,通过等式约束来保证海洋平台的位置[11-12]:
其中:Fx和Fy为海洋环境横荡及纵荡方向上的扰动力;N为海洋环境艏摇方向上的干扰力矩;Ti为锚链张力;φi为锚链的布置角度;θi为着缆点和平台中心的连线与x轴的夹角;di为着缆点到平台中心位置的距离。
不等式约束用来保证锚链的安全性:
2.2 优化算法
上述约束条件中存在着等式约束,变量的个数是12,等式约束有3个,选择其他9个锚链张力变量T1,T2,…T9作为设计变量,其余3个变量T10,T11,T12由线性方程组求出,由此保证等式约束成立。
遗传算法全局搜索能力强,计算时效性较高,适合求解超静定约束优化问题[13-14]。但其局部搜索能力弱,容易陷入局部最优解。锚链张力优化是以张力的均匀分布为基础,优化方法的精度很重要。为了使张力优化性能指标达到最优,将非线性规划和遗传算法相结合,两种算法同时进行搜索,从而达到更好优化解,提高寻优结果的精度。
其步骤可总结如下:
1)初始化参数。包括种群规模Q,代数G,变量T=[T1,T2,…T12],交叉率Pc,变异率Pm。
2)编码操作。变量T采用实数编码,每一个变量用一个实数表示,编码的长度即每个染色体基因的个数,在约束边界[L,U]内随机生成Q个个体作为初始群体。
3)计算种群适应度值,从中找出最优个体。
4)遗传算法操作。经过选择、交叉、变异操作产生新种群。
选择操作采用轮盘赌法,交叉操作采用实数交叉法,变异操作则是随机从种群中选取一个个体,选择个体中的一点进行变异产生更优秀的个体。
5)非线性寻优。每进化一定代数后,得到满足约束的最优控制量解以得到所有满足目标函数的最优种群个体为初始值进行局部非线性寻优,并把寻到的局部最优值作为新个体染色体继续进化。
6)判断进化是否结束,若否则返回3)。
算法流程如图2所示。
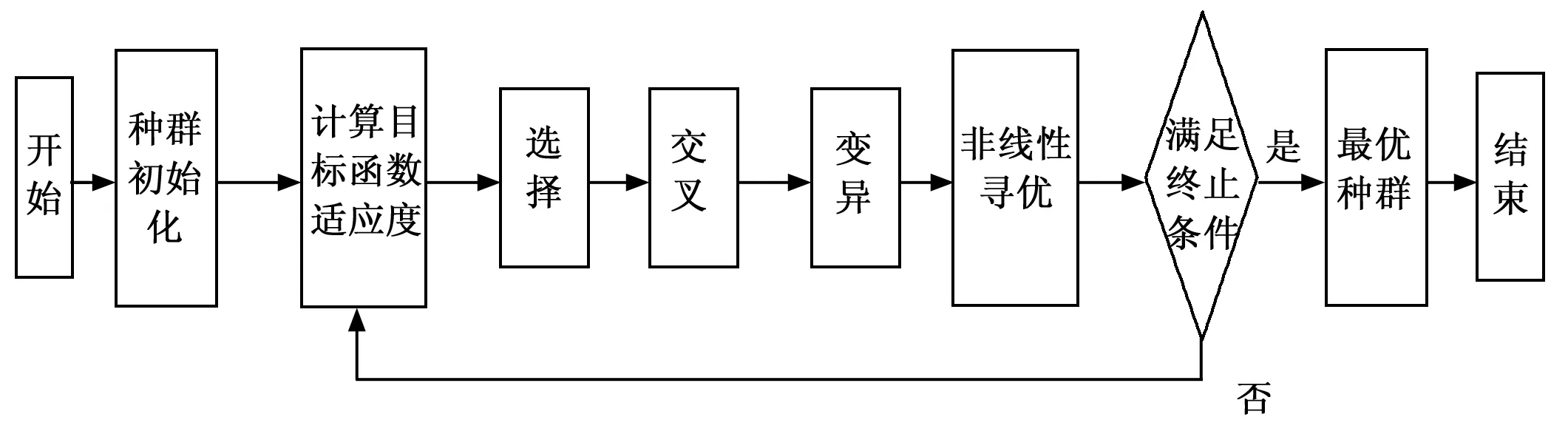
图2 优化算法流程图
2.3 张力优化
平台在待机工况下一年一遇海情(风速 26.3 m/s,流速1.03 m/s,海浪有义波高6 m,三者方向均为60°) 锚链张力优化结果如表2所示。遗传算法的初始参数为:Q=200;G=200;Pc=0.7;Pm=0.01。
优化结果表明,改进的遗传算法具有更高的优化精度,更适合锚链张力的优化。
3 张力优化的应用仿真
张力优化算法的有效与否以及是否适用于半潜式钻井平台锚泊定位系统是需要通过仿真实验来进行验证,锚泊定位平台的位姿信息解算流程如图3所示,其中A=-M-1D,B=M-1。
将张力优化模型、钻井平台数学模型和外界环境载荷模型相结合,在Matlab/Simulink仿真环境下,搭建系统仿真模型如图3所示,仿真模型主要包括:PID控制器(Surge, Sway, Yaw),张力分配(tension_allocation),平台低频运动数学模型(Plat_model),外界环境干扰力(Wind, Current, Wave)。张力分配优化算法和平台数学模型用Simulink/Subsystem模块来实现,环境载荷模型用Simulink/MATLAB-Function模块实现。
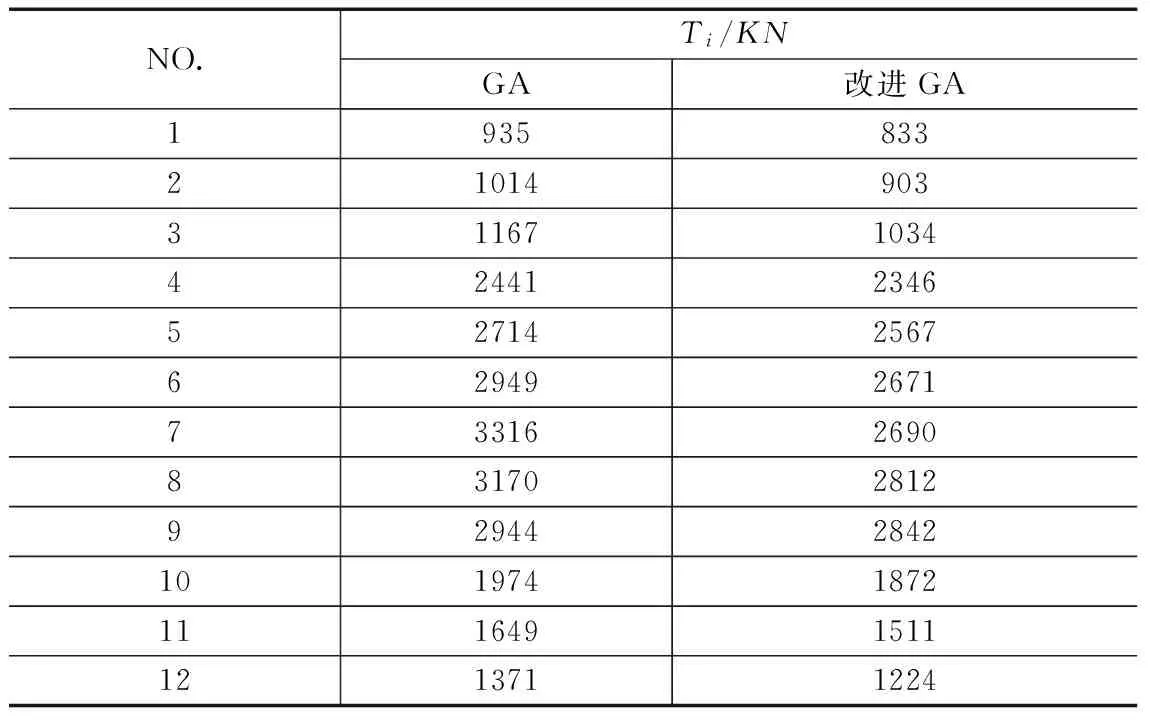
表2 两种优化方法结果
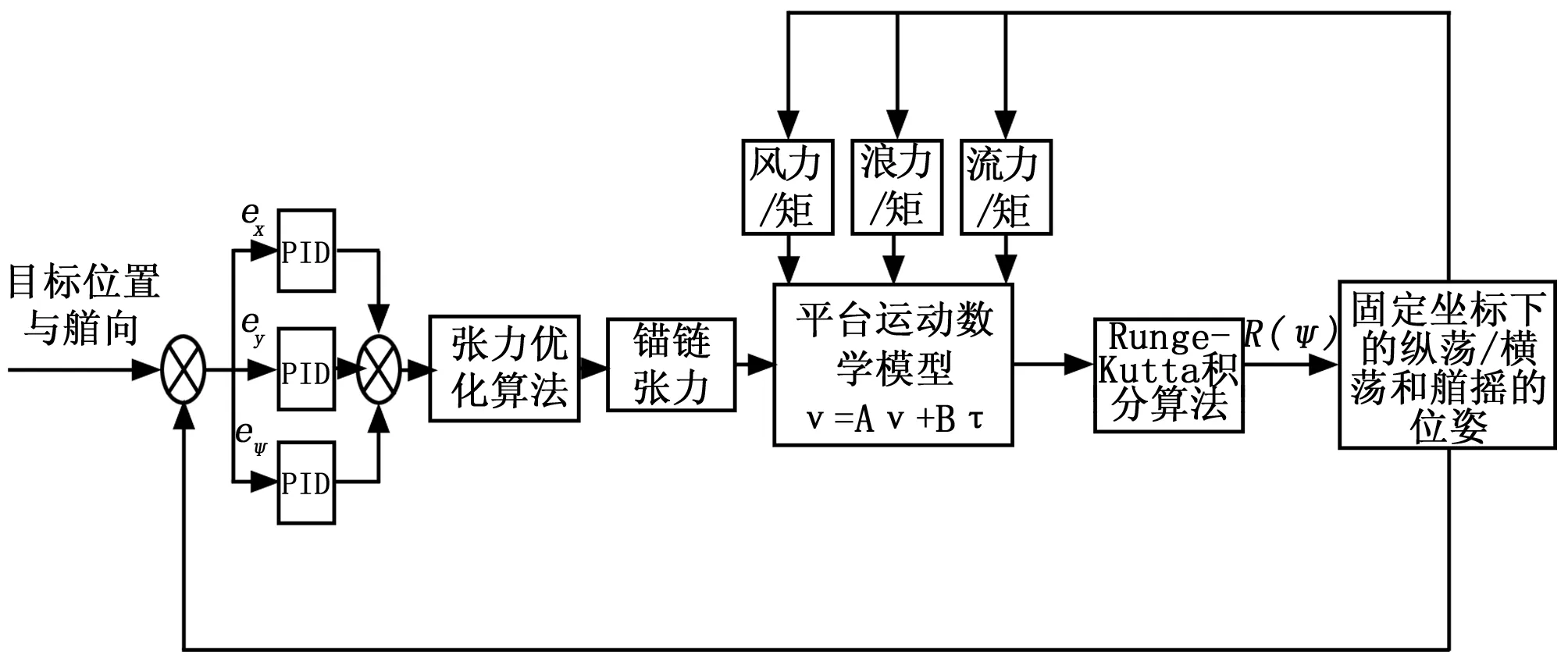
图3 平台运动信息的求解
一年一遇的海情(风速 26.3 m/s,流速1.03 m/s,海浪有义波高6 m,三者方向均为60°),以[0,0,0]为平台的期望位置对半潜式平台的纵荡、横荡和摇艏运动进行仿真研究。仿真结果如图5所示。
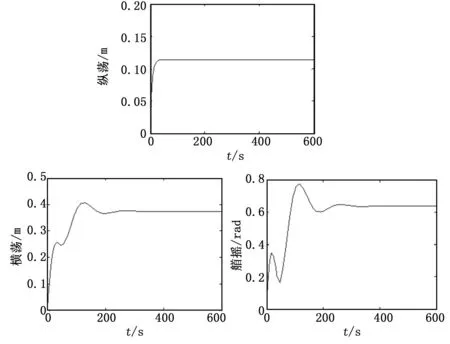
图5 仿真结果
由图5可知,半潜式平台的张力优化应用仿真虽然存在一定的稳态误差,但远远小于平台控制在工作水深3%的要求,满足了平台作业要求的同时又保证了海洋平台工作的安全性。
4 结语
以“海洋石油 981”深水半潜式钻井平台为研究对象,对平台的低频运动模型、以及风、流与二阶波浪力载荷进行了数学建模,利用改进的遗传算法优化锚链的张力,以使其受力均衡,防止单根或多根锚链因受力过大而断裂,充分发挥了所有锚链的能力。最后,仿真结果表明所建立的模型切实可行,易于工程上的实施与推广。
[1] 史琪琪, 杨建民, 肖龙飞. 深水锚泊定位半潜式钻井平台性能数值与试验研究[J]. 海洋工程,2011,(4):30-36.
[2] 王世圣, 谢 彬, 曾恒一, 等.3 000 m深水半潜式钻井平台运动性能研究[J]. 中国海上油气,2007(8):277-281.
[3] 李东亮, 王文祥, 杨风允. 深水半潜式钻井平台锚泊定位系统安装工艺的研究[J]. 中国造船,2013,(1):173-180.
[4] Fossen T I. Guidance and Control of Ocean Vehicles [M]. John Wiley and Sons, Ltd., 1994.
[5] Wang Fang, Li Ye, Wan Lei, etc. Modeling and motion control strategy for AUV[A]. Proceedings of the 2009 IEEE International Conference on Mechatronics and Automation[C]. 2009: 4851-4857.
[6] Fossen T I. Handbook in Marine Craft Hydrodynamics and Motion Control[M]. John Wiley and Sons Ltd, 2011.
[7] 边信黔,付明玉. 船舶动力定位[M]. 北京:北京科学出版社,2011.
[8] 金鸿章,苏晓宇,于安才,等.基于锚链切换的平台自动锚泊定位系统设计[J].电机与控制学报,2014,18:93-98.
[9] Berntsen P I B, Aamo O M, Leira B J. Ensuring mooring line intergrity by dynamic postioning:controller design and experi-mentaltests[J].Automatica, 2009,45(5): 1285-1290.
[10] Mehdi Shafieefar,Aidin Rezvani. Mooring optimization of floating platforms using a genetic algorithem [J]. Ocean Engineering,2007(34): 1413-1421.
[11] Sun T, Gui W B, Yu Z G. Semi-Submersible Platform Positioning Mooring Control Test System Design and Application[J]. Marine Engineering, 2012(32):84-86.
[12] 李敏哲.深水定位系泊系统反正实验研究[D].哈尔滨:哈尔滨工程大学,2013
[13] 胡 宽,常新龙,宋笔锋,等.求解含等式约束化问题的遗传算法[J].上海交通大学学报,2011, 45(1):92-97.
[14] 徐 梅,文士发,王福林,等.遗传算法求解约束优化问题时产生初始种群的改进方法[J].东北农业大学学报,2014,45:105-111.
[15] 王 芳,万 磊,徐玉如,等.深水半潜式钻井平台动力定位实时交互仿真系统[J].哈尔滨工程大学学报,2011(32):1395-1401.
Research on Optimization of Chain Tension for Mooring Anchor for Semi-submersible Platform
Shi Jianfeng,Chen Hongwei,Wang Li
(School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
The semi-submersible platform works in severe sea condition through the anchor mooring positioning, in order to prevent the platform in the external environment to drift under the interference of wind, wave and flow, this paper research on anchoring positioning chain tension. The genetic algorithm combined with nonlinear programming algorithm which can improve the optimization efficiency was adopted to optimize the tension, avoid the tension too large or too small which in platform of a corner, resulting in the chain due to fatigue fracture and energy waste. Simulation results of 981drilling rig was carried out on both in the standby condition and in operation condition, and the simulation in Matlab/Simulink results show that the scheme is effective to balance the distribution of tensions and keep the position of offshore platform.
deepwater semi-submersible;anchor mooring positioning; mathematic modeling; genetic algorithm; simulation
2015-12-08;
2016-02-24。
江苏省产学研联合创新资金(BY2013066-08);江苏科技大学海洋装备研究院科研基金(HZ2015006)。
石建峰(1992-),男,江苏如皋人,硕士研究生,主要从事船舶自动化、计算机仿真方向的研究。
陈红卫(1966-),女,教授,主要从事船舶自动化、计算机仿真方向的研究。
1671-4598(2016)07-0183-04
10.16526/j.cnki.11-4762/tp.2016.07.050
TP391.9 文献标识码:A
猜你喜欢
船海工程(2021年6期)2021-12-17
海洋石油(2021年3期)2021-11-05
中国海上油气(2020年5期)2020-10-20
船舶标准化工程师(2020年1期)2020-06-12
中国修船(2018年5期)2018-10-17
船海工程(2015年4期)2016-01-05
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
电子设计工程(2014年12期)2014-02-27
船舶力学(2014年5期)2014-01-19
振动与冲击(2013年15期)2013-06-02