
基于RTWT的倒立摆控制系统实验设计与实现
2016-12-07 02:19朱清智
电焊机 2016年7期
朱清智,宣 峰
(河南工业职业技术学院,河南南阳473000)
基于RTWT的倒立摆控制系统实验设计与实现
朱清智,宣 峰
(河南工业职业技术学院,河南南阳473000)
利用Matlab/RTW的附加产品RTWT设计了倒立摆控制系统,针对摆角控制设计离散和连续论域的模糊控制器。测试结果表明:系统运行可靠性高、开放性好,便于开设自主实验项目。解决了初学者不能真正理解如何应用控制理论的思想和方法解决问题,而且很难开展自主实验等方面的问题。
RTWT;倒立摆控制系统;模糊控制器;摆角控制
0 前言
基于RTWT的倒立摆控制系统,RTWT采用实时内核保证应用程序实时运行,结合实验室现有的工控机、数据采集卡、模拟实验箱等被控对象及PC机即可构成半实物实验实训系统。其成本低,平台开放,且能够充分利用Simulink仿真软件的强大功能,自由往返于控制系统设计的各个阶段[1]。
1 倒立摆系统的数学模型
直线一级倒立摆系统能够简化为如图1所示的一个小车和匀质摆杆组成的系统。

图1 直线一级倒立摆系统
对一级倒立摆系统作以下假设:①匀质摆杆为刚性体;②不计空气阻力;③不计摆杆转动时的摩擦力、小车与导轨之间的摩擦力、静摩擦等各种摩擦力;④不计电动机的电感。可将直线一级倒立摆系统的数学模型[1]表示为

式中θ为摆杆偏离垂直方向角度;F为作用在倒立摆上的控制力;M为小车质量;m为摆杆质量;l为摆杆质心到转轴距离;g为重力加速度。
2 连续论域模糊控制器的设计与实现
对于直线一级倒立摆系统,设计连续论域和离散论域的模糊控制器,并在实验系统上进行实时仿真实验。倒立摆模糊控制系统的基本结构如图2所示。

图2 倒立摆模糊控制系统结构
由于RTW只支持C语言的S-函数[2],因此本研究采用C语言S-函数建立了倒立摆系统的非线性模型pendulum.c。
连续论域模糊控制器的设计如下。
(1)模糊化。
假设摆角的最大值θm=15°,角速度θ′m=60°/s,Fm=10 N。首先进行尺度变换,用实际的输入量θ、θ′、F分别除以最大值θm、θ′m、Fm,并将其限制在±1的范围内,得到内部论域x、y、z。对内部论域进行模糊分割,各定义五个模糊结合{NL,NS,Z,PS,PL},规定各个模糊集合的隶属度函数都是对称、均匀分布、全交叠的三角形隶属函数[3],如图3所示。

图3 三角形隶属函数
(2)模糊控制规则。
由于输入变量x和y各自定义了5个模糊集合,控制规则至多有5×5=25条,但经过反复试验,只选用其中的11条[4]。直线一级倒立摆的连续论域模糊控制规则集如图4所示。

图4 倒立摆的模糊控制规则集
(3)解模糊。
倒立摆的模糊控制器只有一个输出,采用了重心法解模糊,该方法的运算量虽然比较大,但可以得到性能良好的模糊控制器[5]。
直线一级倒立摆连续论域模糊控制的Simulink实时仿真框图如图5所示。仿真结果如图6所示。

图5 连续论域模糊控制实时仿真

图6 连续论域模糊控制摆角曲线
3 离散论域模糊控制器的设计与实现
模糊化时将真实论域θ、θ′、F变换到内部论域x′、y′、z′,且内部论域是离散的,则所设计的为离散论域的控制器。将θ、θ′分别变换到离散论域{-6,
-5,-4,-3,-2,-1,0,1,2,3,4,5,6},将F变换到离散论域{-5,-4,-3,-2,-1,0,1,2,3,4,5}。对各变量定义模糊集合及其隶属函数表,设计出控制规则集,最终得到倒立摆系统离散论域的模糊控制查询表[3],如图7所示。

图7 倒立摆系统模糊控制查询表
离散论域模糊的模糊控制Simulink实时仿真如图8所示,仿真结果如图9所示。
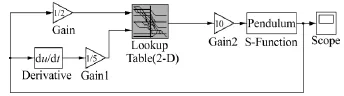
图8 离散论域模糊控制实时仿真

图9 离散论域模糊控制摆角曲线
以上连续论域和离散论域的模糊控制系统的摆角初始值都设为1 rad,比较发现,连续论域模糊控制器稳摆时间较离散论域短;连续论域模糊控制器设计完成后无需运算,调试简便,离散论域模糊控制器的运算量很大,调试过程比较困难;连续论域的模糊控制器鲁棒性好,即使取消几条控制规则,仍能控制倒立摆。
4 结论
建立了一级直线倒立摆系统的非线性模型,并设计了摆角的离散论域和连续论域的模糊控制器,比较二者控制效果。测试结果表明,系统运行可靠性高、开放性好,便于开设自主实验项目。
[1]任飞.基于MATLAB/GUI及实时视窗目标水轮机调速器测试系统开发[D].西安:西安理工大学,2010.
[2]李丽娟.以倒立摆为对象的智能控制算法的研究与应用[D].南京:南京工业大学,2004.
[3]王松辉.基于dSPACE的无人机飞行控制系统半实物仿真研究[D].南京:南京航空航天大学,2008.
[4]姜英妹.dSPACE在过程控制中的应用[D].太原:太原科技大学,2010.
[5]任玲.基于dSPACE仿真平台的一阶直线倒立摆控制研究[D].哈尔滨:哈尔滨工业大学,2012.
[6]Bai Yanhong,Liu Cong.Research on performance of two real-time simulation environments:RTWT and xPC Target [J].Advanced Materials Research,2014(889):1257-1261.
Experimental design and implementation of an inverted pendulum control system based on RTWT
ZHU Qingzhi,XUAN Feng
(He′nan Polytechnic Institute,Nanyang 473000,China)
Using the add-on product RTWT for Matlab/RTW,the experiment of the inverted pendulum control system was designed, and discrete and continuous fuzzy controller were designed for the pendulum angle.The test results show that the system has high reliability,good opening and is convenient for independent experiments.Solve the problem for beginners to solve these problems can not really understand the idea and method of how to solve these problems,but it is very difficult to carry out independent experiments and so on.
RTWT;inverted pendulum control system;fuzzy controller;swing angle control
TG409
A
1001-2303(2016)07-0059-03
10.7512/j.issn.1001-2303.2016.07.14
2015-09-23;
2016-01-20
朱清智(1980—),男,河南南阳人,讲师,硕士,主要从事自动控制系统研究与教学工作。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
塑料包装(2019年6期)2020-01-15
电子技术与软件工程(2019年18期)2019-11-18
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
人民音乐(2016年3期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
