
基于STC90C52智能循迹小车的设计
2016-12-15 07:58齐悦
太原师范学院学报(自然科学版) 2016年3期
齐 悦
(太原广播电视大学 信息技术设备中心,山西 太原 030024)
基于STC90C52智能循迹小车的设计
齐 悦
(太原广播电视大学 信息技术设备中心,山西 太原 030024)
智能循迹小车以STC90C52单片机为控制核心,搭配电机驱动模块、电源模块、LED模块、红外传感器模块等组成.通过红外反射式传感器检测路面信息,单片机内部程序判断后输出PWM信号来控制小车左右轮电机的转动运行,实现小车自动循迹的目的.实验证明,小车运行稳定,响应速度快,能沿着引导轨迹自动行驶,具有实际应用价值.
智能小车;循迹;STC90C52;红外
0 引言
随着大规模集成电路、电子技术、传感和信息处理等技术的飞速发展,人类的生活发生了巨大的变革.利用强大的微机控制功能,国内外学者研究出了许多智能设备,智能车辆就是其中之一.虽然我国对智能车辆的研究起步较晚,且技术上也与发达国家存在差距,但近几年由清华大学、浙江大学、南京理工大学等联合研发的军用户外车7B.8[1]、中国一汽研发的无人轿车等产品的面世,表明智能车辆技术越来越受到关注.
自动循迹小车系统综合运用了嵌入式芯片技术、自动控制技术、信息处理和传感等技术,是一种新的技术综合体,并在很多场合获得了应用.由于其成本低廉、性价比高,能在一些特殊环境中工作,具有广泛的应用前景.本文提出的智能循迹小车以单片机STC90C52为控制核心,利用红外传感器获取路面信息,接收控制中心的PWM信号并通过双直流电机改变小车轮胎方向,达到小车具有自动循迹功能的目的.
1 智能循迹小车系统整体结构
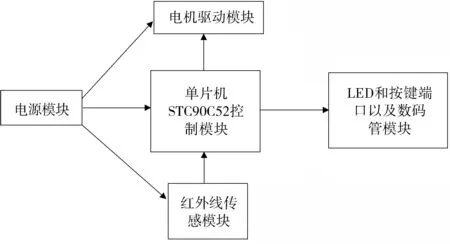
图1 智能小车框架图
设计的智能循迹小车整体结构主要由单片机STC90C52控制模块、轮胎的电机驱动模块、路面信息采集的红外感应模块、灯光指示的LED和按键端口、电源模块等如图1所示.其中电源模块负责给小车中的各模块持续供电;红外线传感模块共设计了5路,负责把采集到的路面信息传送给单片机控制模块;单片机STC90C52控制模块对数据处理后传给电机驱动模块;电机驱动模块负责控制轮胎的转速,使小车完成直行、左转、右转的功能;LED和按键端口负责实现小车转向时灯光的闪烁、各种初始化操作等.
循迹小车的工作原理是:当智能循迹小车在行驶时,位于车下的红外传感模块不断地发射红外光,若地面为白色时产生红外线漫反射,此时红外管能接收到反射回的红外线;反之若地面为黑色时,由于红外线被吸收,故红外管接收不到反射回的红外线.接着红外模块的传感器把接收到的光信号转换为电信号传送给控制中心STC90C52单片机,单片机将信息处理后传送到电机模块对轮胎进行控制,从而实现小车的智能循迹功能.
2 硬件设计
2.1 电机驱动模块
本次设计的小车采用的是SGS公司的L298N[2]双直流电机,该电机采用PWM信号,内部有2个H桥,可接收TTL电平信号.电机驱动电路主要由门电路和两个高速芯片构成,可驱动2 A、46 V以下的电机,该电路的驱动能力强、稳定性高、操作简单,最大程度上满足了智能循迹小车的循迹功能.电机驱动模块的电路如图2所示[3].
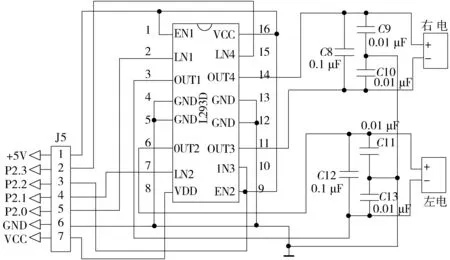
图2 电机驱动模块
设计智能循迹小车时采用前轮驱动,而后轮为万向轮,仅起支撑作用.为每个前轮配置一个电机,接受单片机输出的PWM信号控制轮胎的转速,以达到转向的目的.实验时设计小车寻找的轨迹为一条宽2 cm左右的黑色封闭曲线.
2.2 单片机模块
系统中单片机采用了目前较流行的宏晶科技公司提供的STC90C52单片机[4],它是一款具有强抗干扰能力、低功耗、速度快的单片机,能与传统8051相兼容,工作电压在3.4 V~6 V,它的最小系统由中央处理器、各串口、存储器、时钟、复位电路、电源电路等构成,如图3所示.
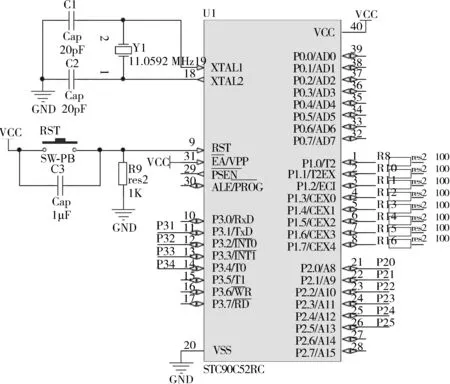
图3 STC90C52单片机系统
图3中P0.0-P3.7表示单片机的输入/输出引脚,PSEN表示外部程序存储器选通信号,ALE/PROG表示地址锁存允许/编程信号,EA/VPP表示外部程序存储器地址允许/固化编程电压输入端,VPD表示备用电源输入端,VCC表示电源端,使用引脚40,电压为5 V.
电源模块采用两个选择门电路,该方式可以输入5 V或6 V的电压.6 V的电压可以由4节干电池提供,5 V电压可以由5 V电源通过数据线传入小车,这样可以提高小车在电压需求方面的灵活性,使循迹小车可以运用到更加广泛的领域.
2.3 红外传感模块
红外传感模块由一个高灵敏度红外接收管和一个高发射功率的红外发光二极管组成,其工作原理为:发射管发出的红外光被反射后,当接收管接收红外信号后,其电阻值会发生变化并以电压的方式在电路板上体现出来;若接收到的红外信号较强,则电压值较大,反之电压值较小.接收到的红外信号强弱会受到反射面与接收管的距离、反射面颜色等因素的影响.
本文中当智能小车在黑色地面上行驶时,位于车下的红外传感模块不断地发射红外光,由于红外线被吸收,故红外管接收不到反射回的红外线,输出高电平;当小车行驶到白线时产生红外线漫反射,此时红外管能接收到反射回的红外线,将输出低电平,从而实现了通过红外线检测信号的功能.随后单片机的输入/输出端口接收到检测信号后进行判断,当I/O口为高电平时,表明小车处在黑色的引线上;反之当I/O口检测到的信号为低电平时,说明小车处在白色的地面上.
设计循迹模块中采用5路采样,中间3个控制轨迹,两侧的用于检测道路的分支、弯道、交叉口等.
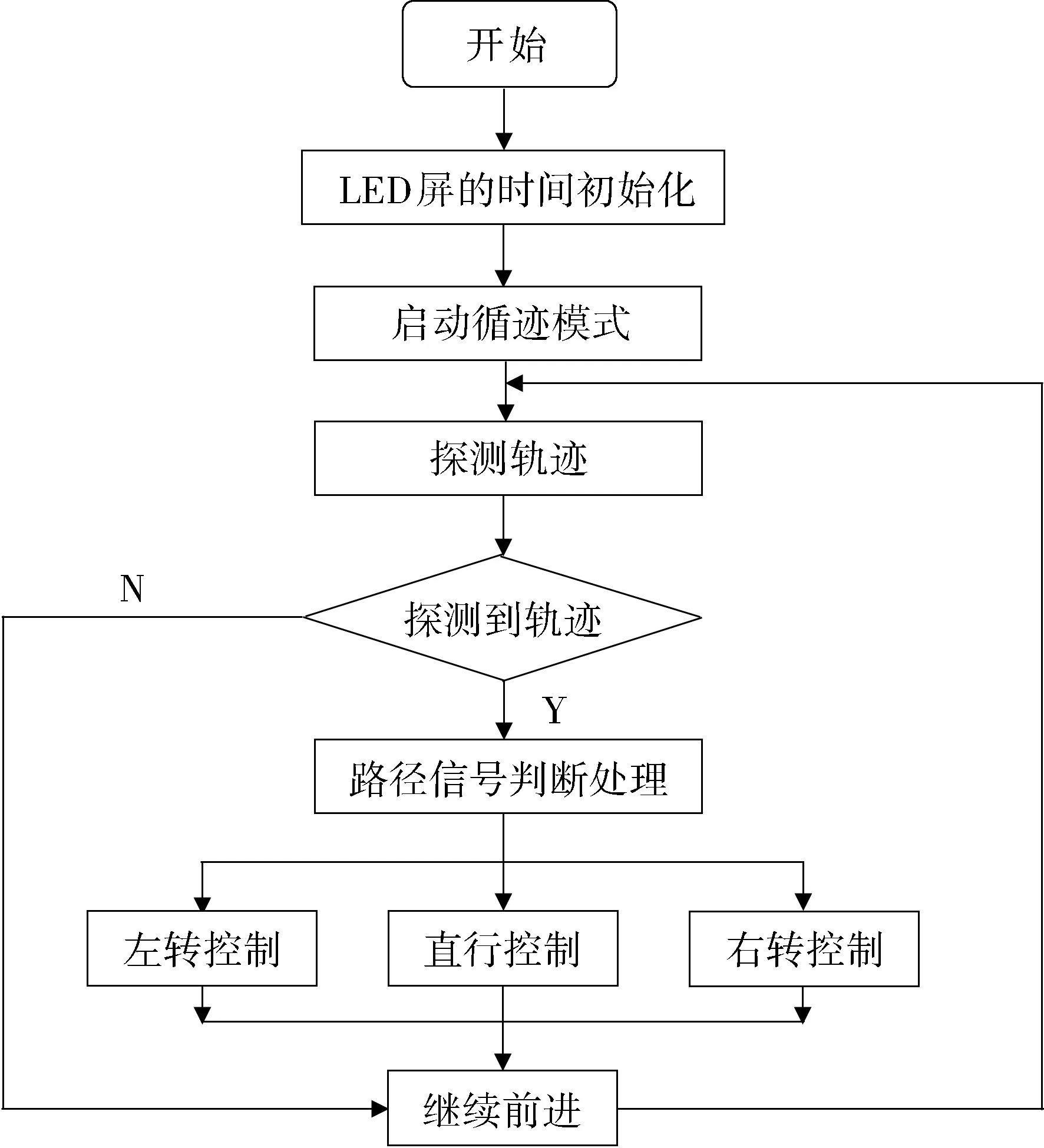
图4 系统的流程图
3 软件实现
3.1 系统流程设计
智能循迹小车的软件部分主要采用C语言编写,设计的智能小车循迹工作流程如图4所示.首先主程序对时间计时器进行初始化;其次开始进入智能小车的循迹运行模式,单片机会不断地检测自己的I/O接口,当有信号时会接收收到的信号并进行判断,发送PWM信号给轮胎上的电机模块来对小车的行进路线进行纠正,从而达到小车能够自动循迹的功能.
3.2 软件环境配置
使用C语言编写好小车的初始化、直行、转弯等程序后,在打开的commagic.exe烧录软件进行程序的烧录,具体的操作步骤为:
Step1:安装USB驱动程序;
Step2:驱动安装完后,检查USB的COM端口号,当前端口为COM1;
Step3:程序烧录时,设置端口号为COM1,波特率为9600,数据位8位,停止位1,自动复位680 m,选择好文件后进行烧录;
Step4:当看到“上载数据成功!”的提示后,表明烧录过程结束.
4 功能测试
当烧录到小车芯片中的程序完成后,给小车通电,验证小车能否按照预先设计的轨迹进行寻迹并且自动行驶.在白纸上设置条宽2 cm左右的一条黑色封闭曲如图5所示,小车在行驶过程中,当中间的探头检测到黑色而两端的探头检测到白色时,小车直行;当靠左边的第二个探头检测到白色时,小车会右拐同时小车上的液晶显示屏开始计时,当小车在右转时,小车右侧的指示灯会闪烁;反之小车会左拐,证明了小车能根据轨迹智能运行.
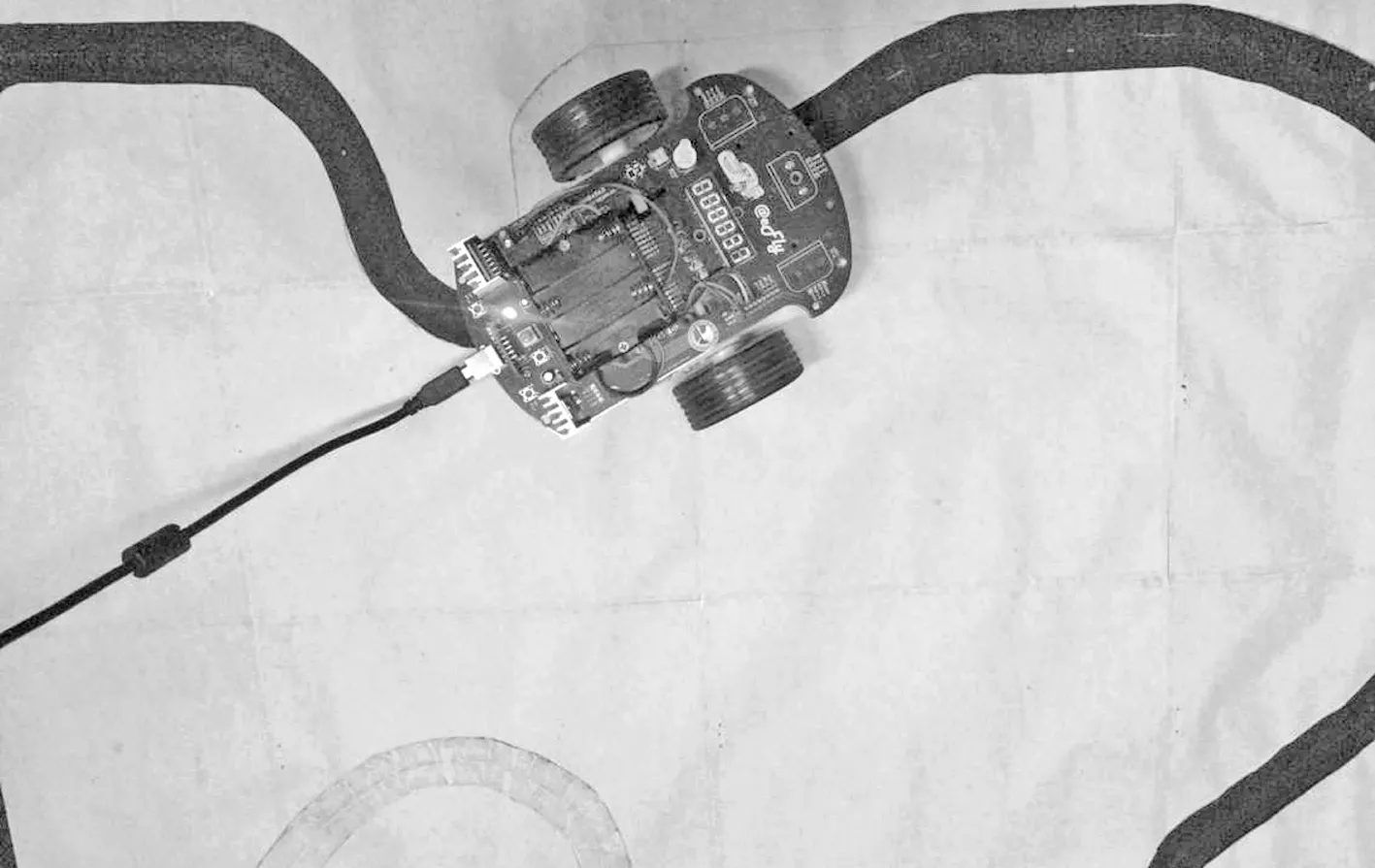
图5 小车运行图
5 结束语
本文设计的智能循迹小车由单片机STC90C52的控制模块、5路红外传感器组成的循迹模块、电机驱动模块、电源模块等组成,小车系统简洁、运行稳定,响应速度快,外观漂亮.经实验测试,小车能够完成预期的智能循迹目的.为了使小车更加智能化,在下一步的工作中可以为小车增加自动识别、远程控制、车速检测和自动报警等功能.
[1] 吕云芳,陈帅帅,郝兴森,等.基于C51高级语言程序控制的智能循迹小车设计与实现[J].实验室研究与探索,2015,34(3):142-145
[2] 尹 杰,杨宗帅,聂 海,等.基于红外线反射式智能循迹遥控小车系统设计[J].电子设计工程,2013,21(23):178-184
[3] Ulrich Tietze,Christop Schenk,Eberhard Gamm.电子电路设计原理与应用(第二版)[M].北京:电子工业出版社,2014
[4] 朱黎博,孙韶媛,谷小婧,等.基于色彩传递与扩展的图像着色算法[J].中国图象图形学报,2010,15(2):200-205
Design of Intelligent Tracking Car Based on STC90C52
QI Yue
(Taiyuan Radio & TV University, Taiyuan 030024, China)
Intelligent tracking car driven by STC90C52 single chip microcomputer as control core, a motor module, power supply module, LED module, infrared sensor module etc...By infrared reflection sensor detection of pavement information, internal procedures of SCM judged and used PWM signal to control the rotation of the car around the motor running, in order to achieve automatic car tracking purposes. Experimental results show that the car is stable, fast response, it can be along the guide track with practical application value.
intelligent car; tracking;STC90C52;infrared
2016-07-02
齐 悦(1981-),男,山西太原人,硕士,太原广播电视大学讲师,主要从事图像处理、嵌入式系统研究.
1672-2027(2016)03-0023-04
TP391
A
猜你喜欢
机电安全(2022年5期)2022-12-13
湘潭大学自然科学学报(2022年2期)2022-07-28
医学概论(2022年3期)2022-04-24
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
