高速列车追踪运行的多目标优化研究
2017-01-06 06:19高浠瑞董海鹰杨立霞
铁道科学与工程学报 2016年12期
高浠瑞,董海鹰,2,杨立霞
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.兰州交通大学 新能源与动力工程学院,甘肃 兰州 730070)
高速列车追踪运行的多目标优化研究
高浠瑞1,董海鹰1,2,杨立霞1
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.兰州交通大学 新能源与动力工程学院,甘肃 兰州 730070)
为了研究追踪列车的多目标优化操纵问题,建立追踪列车的动态安全约束条件和以高效性、准点性、能耗、平稳性为指标的高速列车追踪运行多目标优化模型。该模型以列车操纵手柄位和工况转换点为控制变量,运用克隆选择算法进行优化,经过对原有控制序列反复进行克隆、变异、选择操作后获得列车运行的最优控制序列。以CRH5G型高速列车和兰新线某区间线路数据为基础进行仿真研究,结果表明,本文所提方法可使列车追踪运行过程具有更好的安全、平稳、高效和节能的效果。
高速列车;多目标优化;追踪运行;克隆选择算法
随着我国高速铁路的迅速发展,列车运行速度和运营密度都在不断加大。而由于高速列车的追踪运行过程复杂和不确定性,运行过程中与前行列车的追踪间隔不断变化,同时客运列车需要满足安全、正点、节能、平稳等多个目标要求[1]。因此,如何从多种列车运行控制方式中找出能满足高速列车运行的多目标的最优策略,成为当今高速铁路需要研究的重点课题之一。此外,高速列车运行优化控制的研究更趋向实际情况,最大限度地考虑实际线路运行情况的优化结果更具现实意义。为了找出列车的最优运行控制方式,近些年国内外学者运用了多种方法进行了不同的研究[2-5]。Masafumi等[6]针对能耗最小下的列车速度曲线优化问题分别采用了动态规划法、梯度法和序列二次规划法对所建立的列车节能优化模型求解。Albrecht等[7]分析两车追踪运行过程,通过定义拉格朗日乘子并求解最优化方程,得到后行列车在陡坡段受前车影响下重新调整后的优化控制策略。ke等[8]通过蚁群算法确定列车驾驶策略以降低两站间列车运行能耗。曹岩等[9]设计了基于三角差分策略的以实现高效准点地列车运行调整,但未综合考虑列车运行能耗、安全及平稳等问题。严细辉等[10]采用改进的差分进化算法求解所建立以节能、准点、精确停车、舒适度为目标的运行操纵多目标优化模型。唐海川等[11]建立列车再生制动能耗模型,通过二次规划算法求解追踪列车的优化操纵序列,讨论了列车追踪运行时不同的间隔距离与节能效果密切相关。以上研究具有一定的参考价值,但其也存在一些不足,例如,忽略了列车追踪运行时前车对后车的间隔影响,还有部分研究并未考虑实际线路参数[8-10]。基于上述分析,本文从列车运行过程中的多项性能指标入手,并考虑实际线路参数以及追踪运行时前车的安全距离约束影响,建立给定约束条件下的高速列车追踪运行过程多目标优化模型,利用克隆选择算法进行全局寻优,求得均衡各项指标的高速列车追踪运行操纵策略。
1 高速列车追踪运行过程模型
列车运行控制主要通过牵引、惰行和制动3种工况以及工况转换对列车的速度进行控制。列车操纵状态与追踪运行的位置、速度以及线路参数等信息密切相关。列车由起始站点到达目标站点形成不同的操纵工况序列,高速列车可以按照运行图规定的时间采取多种操纵控制策略,不同控制策略在能耗、安全性和舒适性等方面的表现各不相同。
1.1 高速列车追踪运行过程的动态安全约束
在列车追踪运行过程中,移动闭塞系统大大缩短了安全车距[12],但与此同时先行列车会对追踪列车产生动态安全约束,移动闭塞下列车间隔示意图如图1所示。
移动闭塞下追踪列车在速度v下的最小间隔为
Lm(v)=Laction+Lz+Lsafe+L
(1)
Lsafe=40+0.5v
(2)
式中:Laction为车载信号延迟时间以及司机采取制动所需的反应时间内列车的走行距离,m;Lz为后行列车在速度v下制动距离,m;Lsafe为后行列车在速度v下的安全距离,m;L为列车总长度,m。
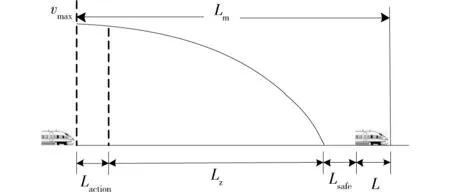
图1 移动闭塞追踪列车间隔示意图Fig.1 Tracking train interval under moving block system
可以得到在移动闭塞系统下,追踪列车运行过程中的动态安全约束条件为
D1(t)-D2(t)≥Lm(v)
(3)
式中:前行列车在t时刻实际行驶距离为D1(t),m;追踪列车在t时刻实际行驶距离为D2(t),m。
1.2 高速列车追踪运行多目标优化模型
高速列车运行的优化目标就是要尽可能地找出给定运行区间、运行时间和列车编组条件下满足安全、正点、高效、平稳和低能耗等目标的最优控制策略。列车运行方程如式(4)~(5)所示[13]
(4)
(5)
满足:v(0)=v(S0)=0,v(s)vmax,aamax。
其中,M表示列车质量;F(v),B(v)和W0(v)分别表示列车在速度为v时的牵引力、制动力和基本阻力;Wj(s)为列车位置s处的附加阻力;k∈[1,0,-1],输入控制序列,“1”为牵引,“0”为惰行,“-1”为制动;vmax表示列车运行路段的最高限速;s表示列车当前的行驶路程,s∈[0,S0],S0表示行驶的总路程;t表示列车运行时间,t∈[0,T0],T0表示规定运行的时间;a表示列车运行的加速度;amax表示列车允许的最大加速度。
高速列车运行组织的高效性意味着列车追踪运行调整过程必须能充分利用整条铁路线路空间,促进整条线路的利用率。故以追踪间距标准L0为依据对高速列车追踪运行过程中的高效性进行评价。高效性评价指标
(6)
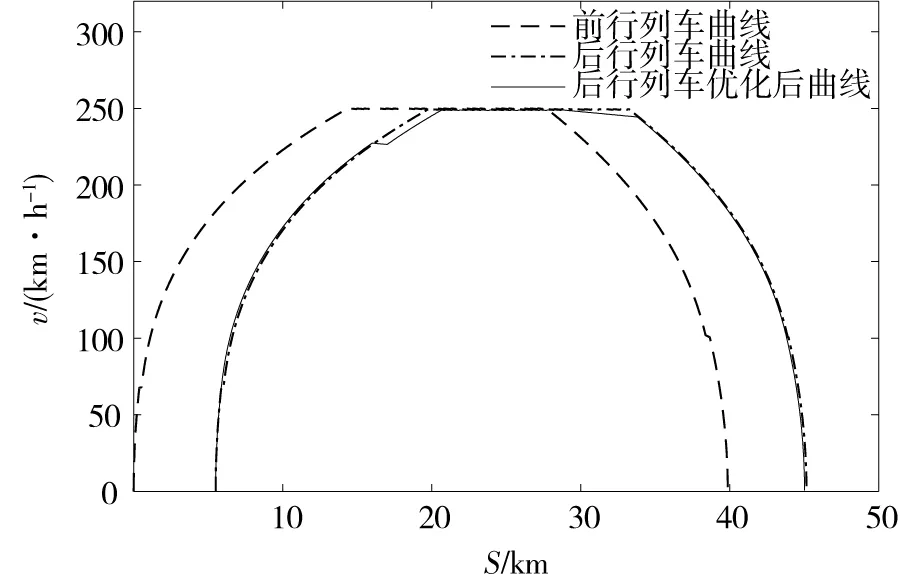
其中,L0≥Lm,L0为追踪运行标准间距,Lm为列车最小追踪间隔,Dv为列车在速度v下的实际间隔距离。当D≥L0时,安全性增加但线路利用率较低;当D 准点性评价指标 ft=T-T0 (7) 其中,T为列车运行所需实际时间。 考虑再生制动能量反馈,列车的能耗函数为[14] (8) 其中,μ为高速列车再生制动是能量反馈到电网的效率。 列车的平稳性以牵引/制动的冲击率对整个运行时间的积分为评价指标 (9) 其中,fc越小则列车运行平稳性越高。 综上分析,高速列车运行操纵的多目标优化问题可以描述为:根据式(4)~(5),定义ki为列车运行在地点i处的控制输入,其中ki∈[1,0,-1],[1,0,-1]分别表示制动、惰行和牵引3种控制输入,对于所描述的列车运行操纵系统,求解出一组最优输入序列和工况转换地点,使得高效性指标fs,准点指标ft,能耗指标fe和平稳性指标fc最小。 简化后的追踪运行中高速列车多目标优化模型如下 f=min(fs,ft,fe,fc) (10) 克隆选择算法是一种基于克隆选择原理设计的免疫算法,它能够兼顾全局搜索和局部搜索,快速收敛到最优解[15]。因此,相比于其他算法,克隆选择算法在解决多目标优化问题时在收敛速度和多样性保持方面有良好的效果,适用于求解列车运行的多目标优化问题。 免疫算法将问题求解的目标函数和约束条件作为入侵生物体的抗原,最优问题的可行解作为免疫系统产生的抗体,通过抗体对抗原的亲和度来描述可行解与最优解的逼近程度将克隆选择算法用于求解列车运行多目标优化问题,具体算法步骤如下: 1)初始化抗体群:首先定义最大迭代代数gmax和抗体群规模N,而后产生规模为N(t)的抗体群A(t)=(a1(t),a2(t),…,aN(t)(t))。将一些优秀司机的操纵方式导入,作为初始的最初代抗体群。 在列车运行多目标优化算法中,抗体即列车的操纵序列,其编码方式采用二进制编码,具体表示为:01表示牵引,00表示惰行,11表示制动。对于每一个抗体计算其对应的fs,ft,fe和fc,并通过这4个值计算抗体所对应的J值。 4)进行克隆选择操作:从抗体各自克隆增值后的子代当中选择优秀的个体,将这些优秀个体组成新的抗体群。 6)判断是否满足终止条件:若达到迭代次数的最大值,则结束优化;否则返回第2步,进行下一代的克隆操作。 为验证本文方法的有效性,以兰新高铁上运营的CRH5G型动车组为实验对象,基于“兰州—嘉峪关”区间实际运行的线路数据对所提方法进行仿真验证。每列车8节编组(5M3T),线路全长109 900 m,图定运行时间1 940 s。线路主要参数如表1所示,列车主要参数如表2所示,列车的牵引制动特性曲线如图2所示。 表1 主要线路参数Table 1 Main railway line parameters 表2 列车主要特性参数Table 2 Main train parameters 图2 CRH5型牵引制动特性曲线Fig.2 CRH5 traction and brake characteristic curve 首先参考《列车牵引计算规程》计算得到高速列车优化前的控制序列和速度—距离曲线如图3和图4所示。可计算得到列车运行总时间为1 926 s,列车总能耗为7.33×109J,平稳性指标为196.5,由图4可知列车一直保持在接近限速250 km/h的速度运行,全程保持了比较高的速度,有一定的安全隐患,由图3可知列车工况转换过于频繁,导致能耗过大,而且降低了列车平稳性。 图3 高速列车优化前控制序列Fig.3 High-speed control strategies before optimization 图4 高速列车优化前距离-速度曲线Fig.4 High-speed distance-speed curve before optimization 采用本文所提出的克隆选择算法以准点性、能耗、平稳性为目标进行优化。克隆选择算法的具体参数设置为:抗体群规模N=100;算法停止代数为50;克隆比例为4;变异概率为5%。高速列车优化后的控制序列和速度-距离曲线如图5和图6所示。优化后的各性能指标如表3所示。 图5 高速列车优化后控制序列Fig.5 High-speed control strategies after optimization 图6 高速列车优化后距离-速度曲线Fig.6 High-speed distance-speed curve after optimization 由图4和图6对比可知,优化后的高速列车运行速度并未始终跟踪运行线路的最高限速,具有更高的安全性,同时运行时间满足实际运营要求,由图3和图5对比可知,列车工况转换有了明显减少,能耗和平稳性指标均得到提高。 表3 多目标优化性能指标与分析 评价指标优化前指标优化后指标性能分析运行时间/s19401948+8能耗/J7.33×1096.72×109-8.3%平稳性196.5146.8-25.3% 表3中“+”表示指标值增加,“-”表示指标值下降,相应的效果性能得到提升。由此可知,经过克隆选择算法优化之后的列车控制策略在能耗、平稳性、安全性上均有所提高,列车运行时间也符合实际铁路运营需求,验证了算法的有效性。 为了进一步考察高速列车追踪运行过程的优化效果,首先对前行列车进行仿真,后行列车发车时间间隔为3 min,保持与前行列车同样的运行曲线。然后依据前行列车的运行数据,建立追踪列车的动态安全约束条件,以高效性、准点性、能耗、平稳性为优化目标,经克隆选择算法优化计算后,高速列车追踪运行距离—速度曲线如图7所示。 图7 高速列车追踪运行距离-速度曲线Fig.7 High-speed tracking operation distance-speed curve 后行列车优化前能耗为1.59×109J,运行时间为815 s,与前行列车之间的距离始终大于追踪运行最小间隔,高效性指标为93%,但列车一直保持在接近限速的速度运行,有一定的安全隐患。高效性指标预留10%的裕量,可根据实际运行情况进行调整。若高效性fs>100%,说明D 1)高速列车运行优化控制是实现高速列车安全、准点、节能、高效运行的一个重要途径。本文根据前后车的运行状态和距离间隔,建立追踪列车的动态安全约束条件和以高效性、准点性、能耗、平稳性为指标的高速列车追踪运行多目标优化模型。以列车操纵手柄位和工况转换点为控制变量,结合二进制编码,利用克隆选择算法进行求解。 2)基于此方法以兰新线某区间线路数据和CRH5G型高速列车牵引、制动、阻力特性曲线为基础进行仿真验证。由分析可知,列车在保证安全准点运行的前提,能耗下降8.3%,平稳性提高25.3%,同时列车追踪运行的高效性维持在90%~100%。 3)仿真结果表明,采用本文所提出方法,通过对高速列车追踪运行时的静态速度约束和动态安全距离约束的定义和分析,保证了追踪列车运行时所必需的安全前提,同时在安全、准点的要求下,进一步降低追踪列车的能耗、改善列车平稳性以及提高线路利用率,具有较好的理论参考价值。 [1] 王海涌,王晓明,党建武.基于模糊约简的高速列车舒适性综合评价[J].铁道学报,2010,32(5):98-102. WANG Haiyong, WANG Xiaoming, DANG Jianwu. Comprehensive evaluation of comfort of high-speed trains based on fuzzy reduction[J]. Journal of the China Railway Society, 2010,32(5):98-102. [2] 唐涛,黄良骥.列车自动驾驶系统控制算法综述[J].铁道学报,2003,25(2):98-102. TANG Tao, HUANG Liangji. A survey of control algorithm for automatic train operation[J]. Journal of the China Railway Society, 2003,25(2):98-102. [3] 余进,何正友,钱清泉.基于微粒群算法的多目标列车运行过程优化[J].铁道学报,2010,45(1):70-75. YU Jin, HE Zhengyou, Qian Qingquan. Multi-objective train operation optimization based on particle swarm algorithm[J]. Journal of the China railway Society, 2010,45(1):70-75. [4] 董海鹰,李军,薛钧义.列车运行过程的多Agent集成探讨[J].控制与决策,2002,17(2):203-206. DONG Haiying, LI Jun, XUE Junyi. Study on multiagent integration of train operation process[J]. Control and Decision, 2002,17(2):203-206. [5] Coleman D, Howlett P, Pudney P, et al. Coasting boards vs optimal control[C]// Conference on Railway Traction Systems. 2010:1-5. [6] Masafumi M, Hideyoshi K. Optimization of train speed profile for minimum energy consumption[J]. IEEE Transactions on Electrical and Electronic Engineering. 2010, 5(3):263-269. [7] Albrecht A, Howlett P G, Pudney P, et al. Optimal driving strategies for two successive trains on level track subject to a safe separation condition[C]// American Control Conference (ACC). Chicago, 2015: 2924-2929. [8] Ke B R, Lin C L, Yang C C. Optimisation of train energy-efficient operation for mass rapid transit systems[J]. IET Intelligent Transport Systems, 2012, 6(1):58-66. [9] 曹岩,孟学雷. 基于改进差分算法的高速列车运行调整研究[J]. 铁道科学与工程学报,2014,11(6):102-108. CAO Yan, MENG Xuelei. High-speed train rescheduling based on an improved triangle differential algorithm[J]. Journal of Railway Science and Engineering, 2014,11(6): 102-108. [10] 严细辉,蔡伯根,宁滨,等.基于差分进化的高速列车运行操纵的多目标优化研究[J].铁道学报,2013,35(9):65-71. YAN Xihui, CAI Baigen, NING Bin,et al. Research on multi-objective high-speed train operation optimization based on differential evolution[J]. Journal of the China Railway Society, 2013,35(9):65-71. [11] 唐海川,王青元,冯晓云.地铁列车追踪运行的节能控制与分析[J].铁道学报,2015,37(1):37-43. TANG Haichuan, WANG Qingyuan, FENG Xiaoyun. Energy saving control of metro train tracing operaton[J]. Journal of the China Railway Society, 2015,37(1):37-43. [12] 彭俊彬.动车组牵引与制动[M].北京:中国铁道出版社,2009. PENG Junbin. EMU traction and braking[M].Beijing: China Railway Publishing House,2009. [13] 中华人民共和国铁道部.列车牵引计算规程[M].北京:中国铁道出版社,1999. Ministry of Railways. Regulations on railway train traction calculation[M]. Beijing: China Railway Publishing House, 1999. [14] 刘建强,魏远乐,胡辉.高速列车节能运行优化控制方法研究[J].铁道学报,2014,36(10):7-12. LIU Jianqiang, WEI yuanle, HU hui. Research on optimization control method of energy-saving operation of high-speed trains[J]. Journal of the China Railway Society, 2014,36(10):7-12. [15] 杨咚咚,焦李成,公茂果,等.求解偏好多目标优化的克隆选择算法[J].软件学报,2010,21(1):14-33. YANG Dongdong, JIAO Licheng, GONG Maoguo,et al. Clone selection algorithm to solve preference multi-objective optimization[J]. Journal of Software, 2010, 21(1):14-33. [16] Castro LND, Zuben FJV. Learning and optimization using the clonal selection principle[J]. IEEE Transaction on Evolutionary Computation, 2002, 6(3):239-251. Research on multi-objective optimization for trackingoperation of high-speed train GAO Xirui1,DONG Haiying1,2,YANG Lixia1 (1. School of Automation and Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China;2. School of New Energy and Power Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China) In order to study the multi-objective optimization strategy of tracking train, the multi-objective optimization model for tracking operation of high-speed train is established subject to the constraint of dynamic security constraints. The high efficiency, punctuality, low energy and stability are also selected as optimization indicators in this model. The model takes the train control notch and the corresponding train position as control variables. By applying the original control sequence to immune clone, cloning mutation and clonal selection operation, the optimal control sequence of the train arrangement was achieved. Taking the CRH5G and Lanzhou-Urumqi High-speed Railway as basic data for simulation, the results show that this method can make effective realization of train tracking operation with safety, stability, efficiency and energy-saving. high-speed train; multi-objective optimization; tracking operation; clonal selection algorithm 2014-01-20 中国铁路总公司科技研究开发计划项目(2014X008-F);甘肃省自然科学基金资助项目(1208RJZA180) 董海鹰(1966-),男,甘肃武威人,教授,博士,从事复杂系统建模、控制和优化研究;E-mail:hydong@mail.lzjtu.cn U268.4 A 1672-7029(2016)12-2335-06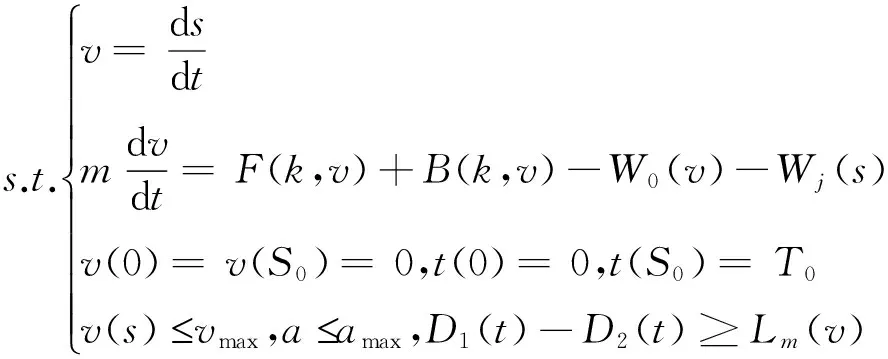
2 基于克隆选择算法的多目标优化





3 仿真案例与结果分析

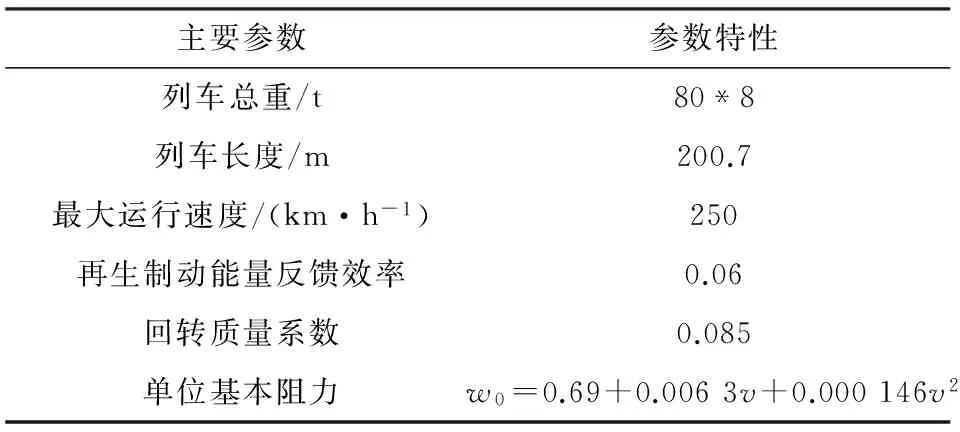
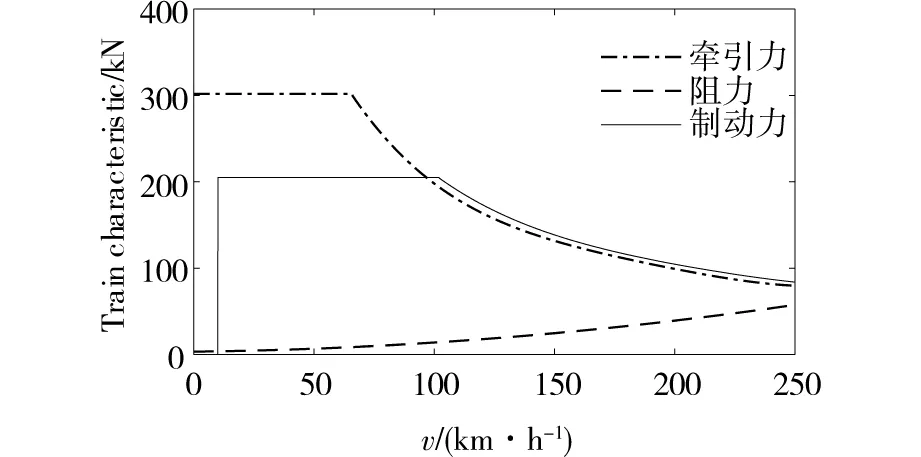
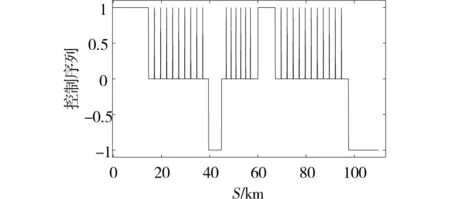
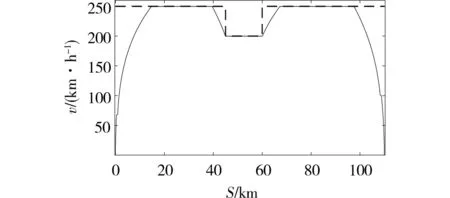
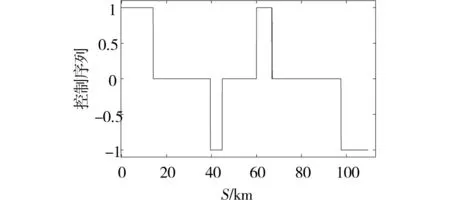
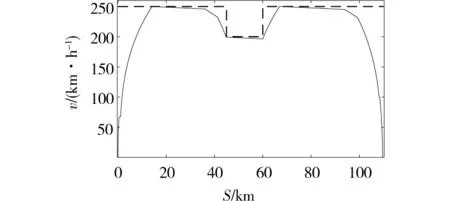
Table 3 Performance indicators and analysis of the multi-objective optimization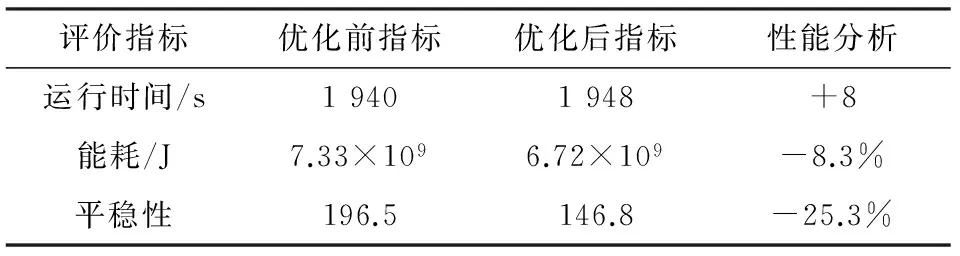
4 结论
猜你喜欢
数学物理学报(2021年3期)2021-07-19
科技与创新(2020年19期)2020-10-09
铁道通信信号(2020年1期)2020-09-21
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
读者(2019年20期)2019-10-09
环球时报(2019-01-04)2019-01-04
铁道通信信号(2018年10期)2018-12-06
中国国家旅游(2016年3期)2016-09-21
中国铁道科学(2015年6期)2015-06-21