悬臂式前列腺粒子植入机器人重力矩平衡分析及实验研究
2017-01-07 02:15姜金刚李斌张永德杜海艳王晓飞许勇
电机与控制学报 2016年12期
姜金刚, 李斌, 张永德, 杜海艳, 王晓飞, 许勇
(1.哈尔滨理工大学 机器人技术及工程应用研究中心,黑龙江 哈尔滨 150080;2.哈尔滨理工大学 智能机械研究所,黑龙江 哈尔滨 150080;3. 中国人民解放军总医院,北京 100853)
悬臂式前列腺粒子植入机器人重力矩平衡分析及实验研究
姜金刚1,2, 李斌1, 张永德1,2, 杜海艳1,2, 王晓飞2, 许勇3
(1.哈尔滨理工大学 机器人技术及工程应用研究中心,黑龙江 哈尔滨 150080;2.哈尔滨理工大学 智能机械
研究所,黑龙江 哈尔滨 150080;3. 中国人民解放军总医院,北京 100853)
前列腺癌是男性泌尿系统最常见的恶性肿瘤,经会阴前列腺癌放射性粒子植入对于器官局限的早期低危前列腺癌是安全有效的治疗手段。传统的粒子植入手术是由医生手动完成的,由于手工操作的不确定性很难保证粒子植入的定位精度。提出采用机器人实现粒子植入手术,利用机器人的位姿精确控制能力解决手工操作不确定性导致的定位精度低的问题。进行了悬臂式粒子植入机器人的设计,由于悬臂结构产生的重力矩在工作时对机器人的运动稳定性产生影响,在对力平衡机构分析的基础上,在大小臂的回转关节处设计了十字交叉双弹簧平衡机构来平衡悬臂产生的重力矩,建立了悬臂式前列腺粒子植入机器人重力矩平衡的数学模型。利用Solidworks/Motion模块对引入十字交叉双弹簧平衡机构的悬臂式前列腺粒子植入机器人进行了运动仿真。基于悬臂式前列腺粒子植入机器人实验系统,分别进行了末端水平负载1 kg、竖直负载1 kg和水平竖直复合负载各1 kg情况下的平衡实验,实验和仿真结果表明悬臂式前列腺粒子植入机器人达到了设计时的预期目标,实现了重力矩的平衡。
前列腺粒子植入机器人;悬臂式;重力矩;平衡分析;十字交叉双弹簧机构
0 引 言
前列腺癌是男性泌尿系统最常见的恶性肿瘤,也是威胁中老年男性健康的重要杀手,在欧美国家前列腺癌是中老年男性发病率最高的恶性肿瘤之一[1]。在亚洲,尤其是中国,前列腺癌的发病率虽不高,但是随着前列腺癌检测手段的日益先进,我国的前列腺癌检出率大大升高[2]。前列腺癌的治疗方法主要有根治性前列腺切除术、外放射治疗及近距离放射治疗等,其中经会阴前列腺癌放射性粒子植入对于器官局限的早期低危前列腺癌是安全有效的治疗手段[3]。传统的粒子植入手术是由医生手动完成[4],由于手工操作的不确定性很难保证粒子植入的定位精确度。基于此问题,提出利用机器人辅助系统来进行粒子植入手术。自从20世纪末工业机器人第一次被应用到临床医学后,有大量的学者投入到研究医疗机器人的行列中[5-8]。前列腺癌介入治疗机器人的研究始于21世纪初期[9-10],其不仅定位精确度高、运动稳定性好、灵巧性及连续工作能力强,而且对患者造成的创伤小、便于术后恢复[11]。本文设计了经会阴穿刺进行前列腺癌近距离放射性治疗的悬臂式前列腺粒子植入机器人,但是由于其悬臂式的结构产生的重力矩会对机器人的运动稳定性产生影响,所以,对悬臂式机器人重力矩平衡分析和力矩平衡机构的研究具有重要现实意义。
关于机器人力矩平衡的问题,专家学者已经做了一些研究[12-14],H. S. Bassan等[15]设计了一个5自由度的柔索混联粒子植入机构,其在并联机构的末端设计并加入了长度为50mm、刚度为0.72N/mm的弹簧,利用弹簧产生的力矩来平衡植入器重力矩,这种方式并不能实现机器人整体结构的力矩平衡。Po-Yang Lin等[16]研究了3自由度手臂的弹力平衡系统,采用在连杆上加载2根拉弹簧来平衡自身重力,通过建立最大稳定控制刚度的定量表示求解出合适的弹簧刚度和加载位置。罗杨宇等[17]研究了一种肝癌消融治疗辅助定位机器人的弹性平衡系统,其在基座与大小臂上加载4根拉弹簧,给零位上的弹簧以初始变形,随着机器人的运动,弹簧支架将会发生相应的转动,弹簧支架的转动就会自动调节弹簧力,保证机器人在大多数位姿的力矩平衡。上述两种方法的缺点是数值求解过程非常复杂,而且手臂在位形变化下始终存在不平衡力矩。
在对力平衡机构分析的基础上,建立引入十字交叉双弹簧平衡机构的悬臂式前列腺粒子植入机器人重力矩平衡的数学模型,利用Solidworks/Motion模块对悬臂式前列腺粒子植入机器人进行了运动仿真。基于悬臂式前列腺粒子植入机器人实验系统,进行不同负载类型的力矩平衡实验研究。
1 悬臂式前列腺粒子植入机器人工作原理
经会阴穿刺进行粒子植入手术时,由于不需要避让骨骼和敏感组织,所以粒子植入针可以采用水平移动的方式刺入靶点。因此悬臂式前列腺粒子植入机器人采用水平直线运动的方式,并且针的轴线始终处于水平状态。根据执行机构的运动方式,机器人只需要满足空间任意位置的定位即可。根据机器人的工作空间要求和工作方式,选择串联开链式机器人,即由一个移动副、两个转动副组成。机器人三维模型如图1所示,前列腺粒子植入机器人关节驱动电机位于基座上,且轴线与大臂的回转轴线重合。通过平行四边形机构将小臂驱动电机的运动传递给小臂以实现对小臂的驱动。为了实现执行机构始终保持水平,植入针搭载平台亦是通过平行四边形机构与大臂的回转关节相连。由图1可知机器人工作时处于悬臂状态,悬臂自重产生的力矩会导致机器人工作时运动学特性以及动力学性能发生变化。
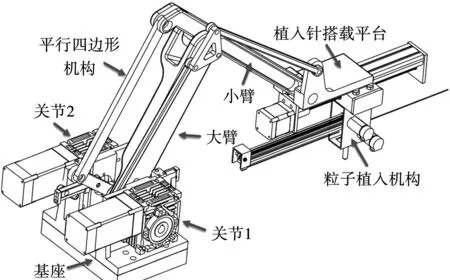
图1 悬臂式前列腺粒子植入机器人结构Fig.1 Structure of cantilevered prostate seed implantation robot
2 悬臂式前列腺粒子植入机器人重力矩平衡结构分析工作原理
2.1 小臂重力矩平衡结构分析
为了避免悬臂重力矩对机器人的性能产生影响,有必要进行悬臂式结构的力矩平衡问题研究。常用力矩平衡方式有如下几种:
1)配重平衡机构:利用重物产生一个与重力矩等值反向的力矩,虽然该机构平衡效果好,但是对于空间有一定要求,如图2(a);
2)弹簧平衡机构:利用弹簧产生平衡力矩,平衡效果好,适用于中小负载,如图2(b);
3)气缸平衡机构:利用气压或液压产生平衡力矩,其承载能力强,多用于重载搬运和点焊机器人上,如图2(c)。

图2 力矩平衡原理Fig.2 Torque balance mechanism
由于悬臂式前列腺粒子植入机器人工作时植入针搭载平台始终保持水平,是依靠大臂与小臂的联动来到达预期目标位姿,所以机器人总体重心总是随着大臂与小臂的摆动而移动。
在对小臂进行自重平衡分析时大臂为固定状态,即小臂相当于绕固定铰链运动如图3所示。为便于分析忽略小臂连杆和小臂曲柄的质量。

图3 小臂平衡机构Fig.3 Forearm balance mechanism
小臂重力矩为
T1=G1L1cosθ1。
(1)
式中:G1为小臂重力,L1为小臂质心到大小臂连接关节处距离,θ1为小臂曲柄与水平方向夹角。
采用十字交叉双弹簧平衡机构来实现小臂重力矩的平衡,十字交叉双弹簧平衡机构对小臂产生的平衡力力矩为
TP=K1φ1L3sinθ1+K2φ2L3cosθ1。
(2)
式中:L3为平衡力作用点到小臂曲柄回转中心的距离,K1和K2分别为小臂水平和竖直弹簧刚度系数,△L-为水平弹簧θ=0°时初始变量,△L⊥为竖直弹簧θ=0°时初始变量,φ1=△L-+L3(1-cosθ1),φ2=△L⊥+L3sinθ1。
令式(1)和式(2)相等得到
G1L1=K1φ1L3tanθ1+K2φ2L3。
(3)
令K1=K2=K3,则式(9)为
(4)
令△L-=-L3得
G1L1/L3=K3△L⊥。
(5)
由以上推论可知,若要小臂平衡力矩与角度变量无关,则需要满足以下三个条件:
1)两根弹簧的刚度系数要相同;
2)竖直弹簧安装时的预紧力为G1L1/L3,其对小臂回转中心的力矩与小臂重力矩等大反向;
3)水平弹簧安装时的初始变量为△L-且其满足△L-=-L3。
因此,通过选择弹簧刚度系数相同的弹簧;保证竖直弹簧安装时的预紧力为G1L1/L3,且预紧力对小臂回转中心的力矩与小臂重力矩等大反向;此外水平弹簧安装时的初始变量为△L-且其满足△L-=-L3。满足上述三个条件则小臂平衡力矩与角度变量无关,十字交叉双弹簧机构可以实现小臂重力矩的完全平衡。
2.2 大臂重力矩平衡结构分析
小臂已通过十字交叉双弹簧平衡机构实现了绕关节2的重力矩平衡,则大臂的重力矩分析如图4所示,其悬臂重力矩T表达式为
T=GLcosθ。
(6)
式中:G为大臂与小臂重力和,L为悬臂总质心到关节1轴线距离,θ为大臂与水平方向的夹角。
由式(6)可知,如果要平衡该力矩需要输入一个按余弦规律变化的反向力矩。如果采用配重平衡法,若配重物重量不变,则配重的作用点到大臂回转关节1轴线的距离需要根据大臂转角的变化精确的以余切规律跟随,显然这种可移动配重方式不可取。本文设计了一种单弹簧平衡机构,如图5所示。这种平衡机构将弹力的大小与弹簧形变量成正比的特点与余弦输出机构相结合,实现平衡力以大臂转角的余弦规律变化,即该机构在平衡过程中水平布置的弹簧形变规律为余弦,其平衡力表达式为
F=KL2cosθ。
(7)
式中:K为弹簧刚度系数,L2为平衡力在大臂上作用点到关节1轴线的距离。

图4 大臂配重平衡Fig.4 Counterweight balance of big arm
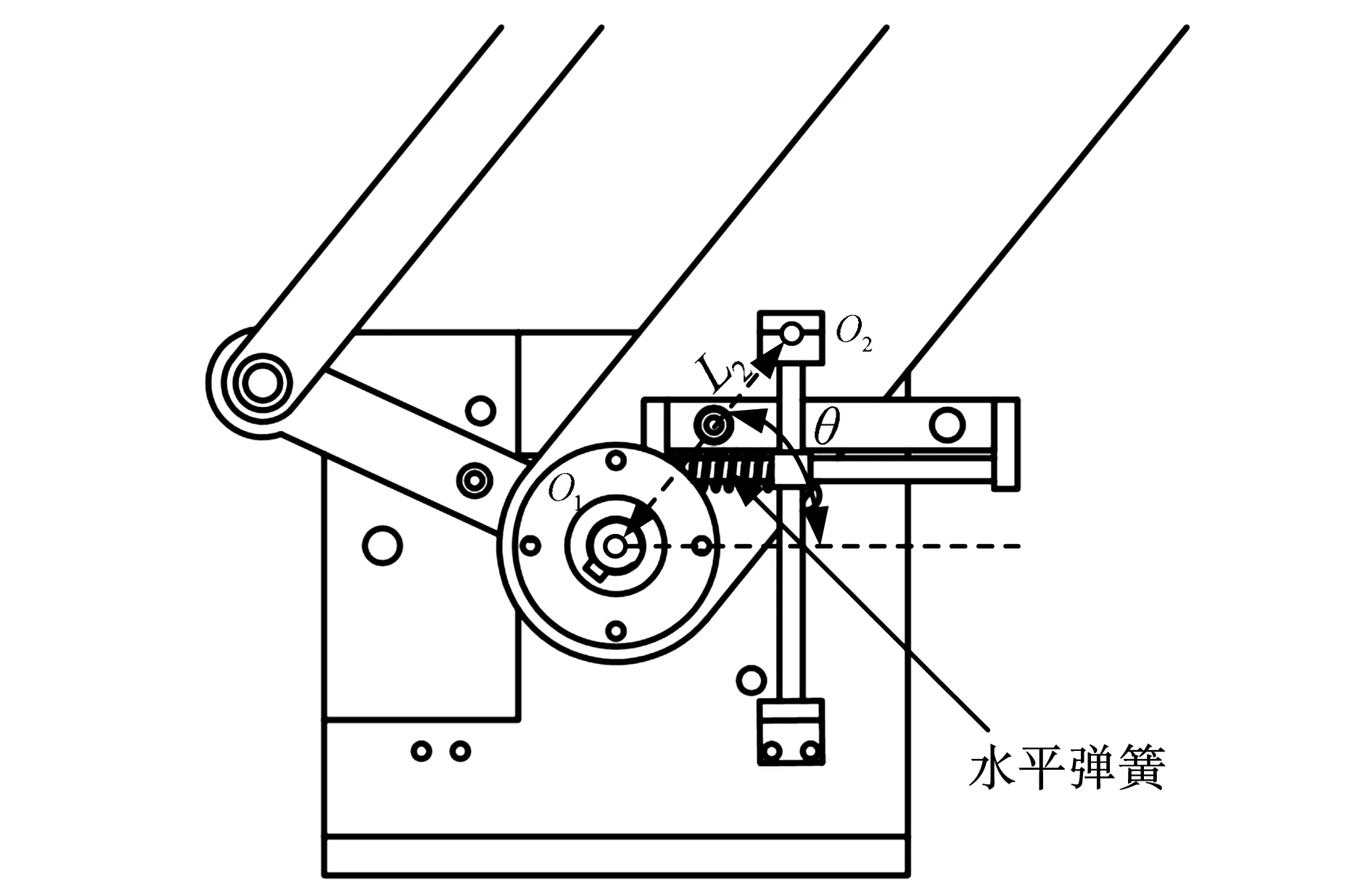
图5 水平单弹簧平衡机构Fig.5 Horizontal single-spring balance mechanism
由于其力臂为L2sinθ,则该弹簧产生的平衡力矩为
(8)
令式(6)和式(8)相等,则
(9)
由式(9)可知,该方法只是改变了函数变化规律,没有消除平衡中的变量,但在对该平衡机构进行运动分析时发现滑块与导轨长度方向上任意点的距离变化规律为L2(1-sinθ),从而可引入一个函数值与式(9)互为相反数的正弦函数,故在导轨断面与滑块之间增加一根刚度系数与水平弹簧相同的平衡弹簧,如图6所示。本文设计的十字交叉双弹簧平衡机构为两根弹簧安装在一套十字滑块机构内,弹簧的一端与机架相连,另一端与十字滑块相连,且其中心线与导轨的中心线重合。增加弹簧后其平衡方程为
(10)
展开式(10)后可得
(11)
由式(11)可知,此十字交叉双弹簧平衡机构可以消除角度变量,实现大臂重力矩的平衡,只需要选择合适刚度的弹簧即可。

图6 十字交叉双弹簧平衡机构Fig.6 Cross double-spring balance mechanism
3 悬臂式前列腺粒子植入机器人重力矩平衡仿真
3.1 小臂重力矩平衡仿真
将大臂竖直固定在机架上、小臂轴线初始位置与大臂轴线夹角为33°时的位姿作为小臂平衡时的初始位置。电机运动规律设定为y=30·sin(πx-π/2)+30。运动零部件总重力为G1=16.15 N,L1=144.58 mm,L3=40 mm。在上述条件下电机输出转矩曲线如图7所示。
引入十字交叉双弹簧平衡机构后电机输出转矩曲线如图8所示,其平衡弹簧参数为K3=1.2 N/mm,水平弹簧初始形变量△L-=40 mm。竖直弹簧初始形变量为△L⊥=40 mm。由图7、图8可知引入十字交叉双弹簧平衡机构后电机输出转矩峰值降低了78.48%。

图7 无平衡机构时小臂驱动电机输出转矩Fig.7 Output torque of forearm drive motor without balance mechanism
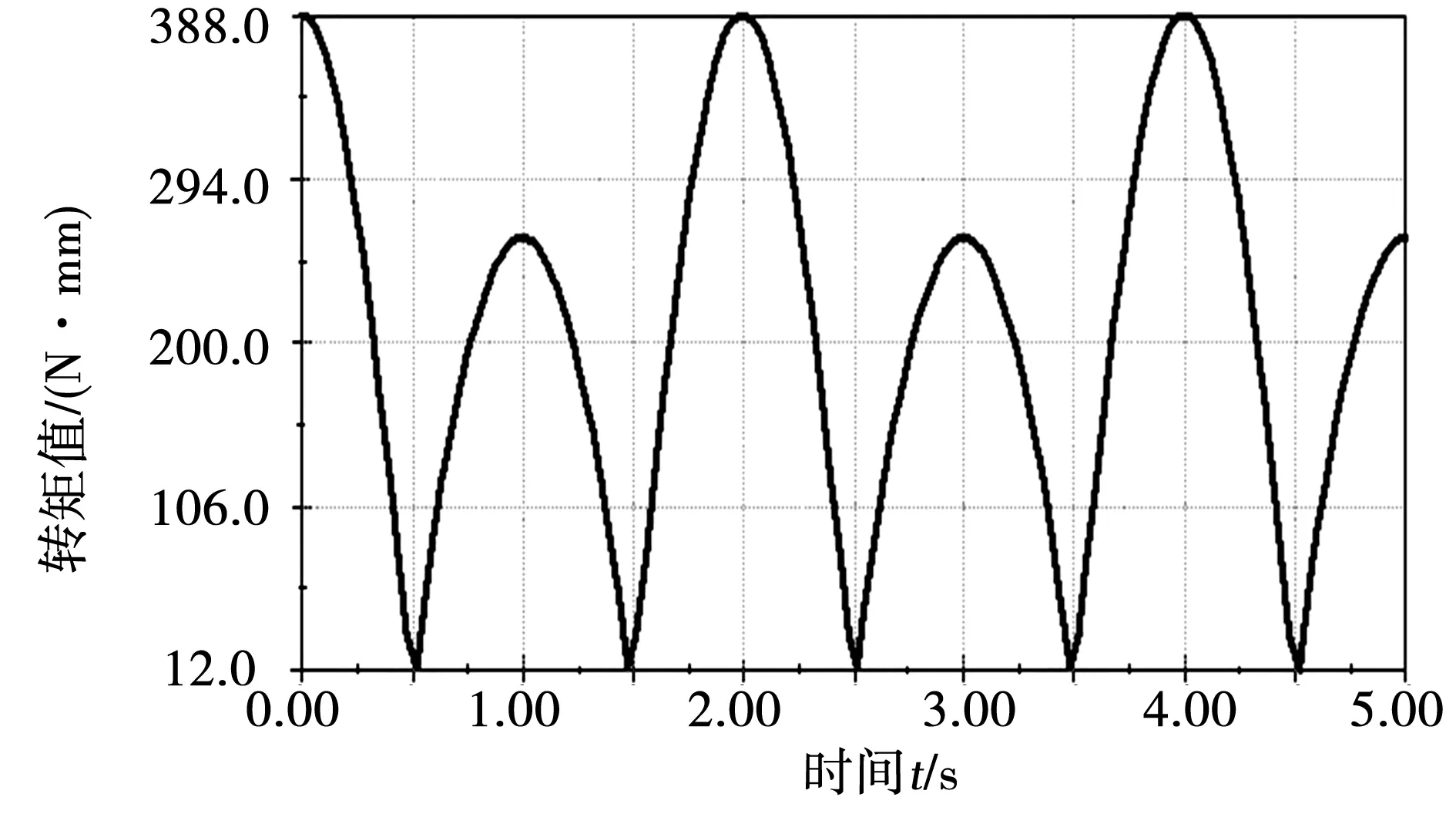
图8 有平衡机构时小臂驱动电机输出转矩Fig.8 Output torque of forearm drive motor with balance mechanism
3.2 大臂重力矩平衡仿真
将小臂的重力等效到大小臂联合的关节处,仿真参数为G=52.11 N,L=166 mm,θ∈(π/6,π/2),L2=90 mm。将参数代入式(11)得到弹簧刚度为K≈1.04 N/mm。在Solidworks/Motion中输入相应参数并设定大臂运动规律后进行Motion分析,分析结果如图9、图10所示。
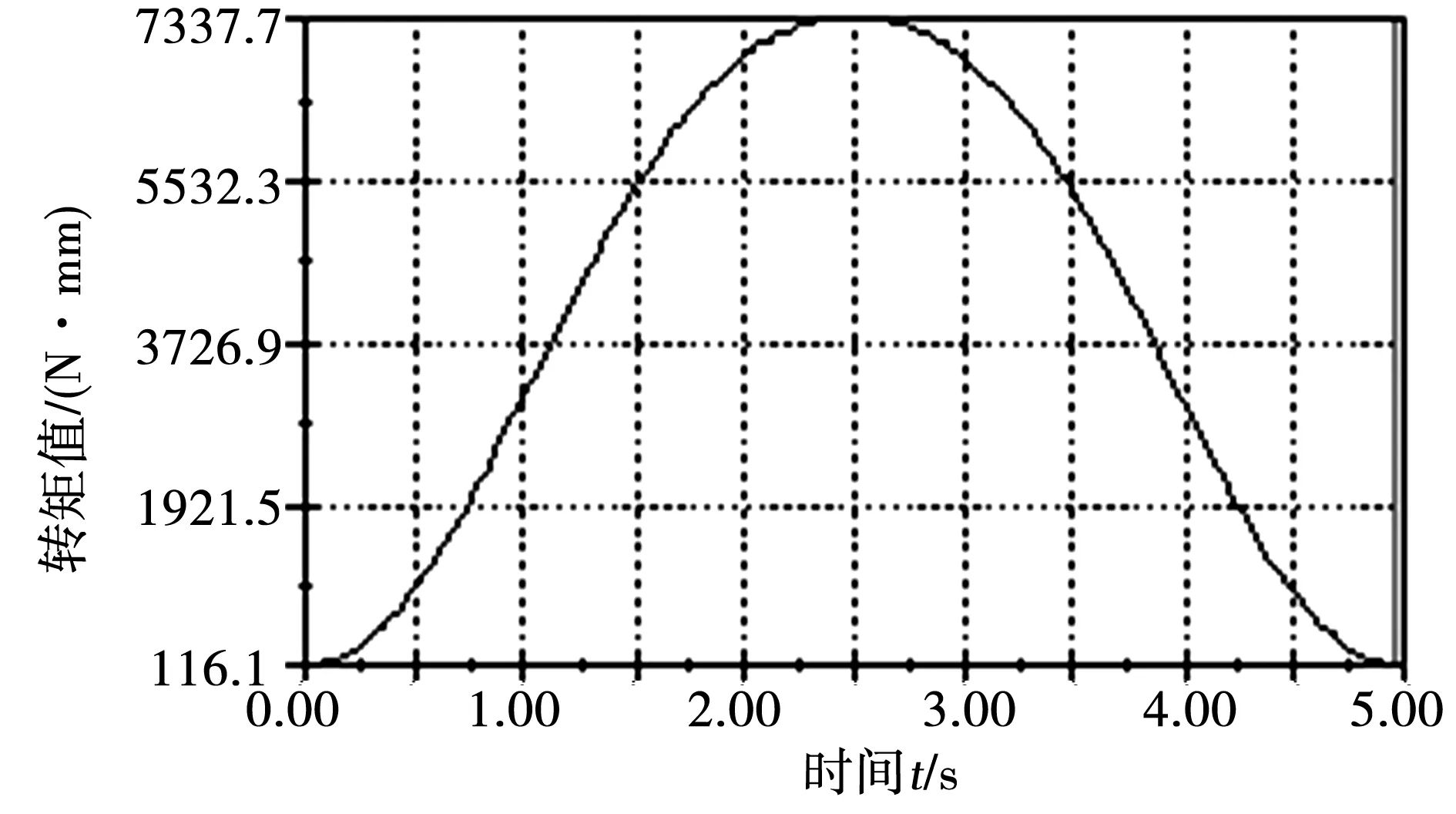
图9 无平衡机构时大臂驱动电机输出转矩Fig.9 Output torque of big arm drive motor without balance mechanism
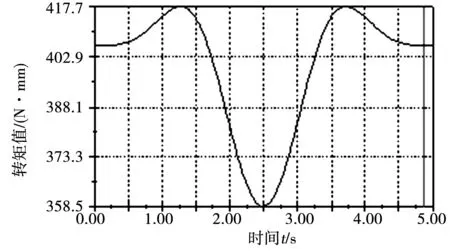
图10 有平衡机构时大臂驱动电机输出转矩Fig.10 Output torque of big arm drive motor with balance mechanism
采用十字交叉双弹簧平衡机构后,极大地减小了悬臂自重对电机输出力矩的影响,平衡后的最大输出转矩约为平衡前的5.7%,而平衡后的输出转矩幅值波动仅为平衡前的0.8%。
3.3 机器人联动重力矩平衡仿真
机器人联动时,大臂初始位置参数为:初始位置为长度方向与水平方向垂直,顺时针为正方向,平衡弹簧均无初始形变量即ΔL=0,K=4 N/mm,L=40 mm。小臂初始位置参数为:小臂轴线初始位置与大臂轴线夹角为33°,逆时针为正方向,ΔL-=40 mm,ΔL⊥=40 mm,K1=K2=1.2 N/mm,L1=40 mm。

图11 联动有平衡机构时大臂驱动电机输出转矩Fig.11 Output torque of big arm drive motor with balance mechanism while coordinated movement
由平衡前后电机输出转矩仿真结果可看出大臂平衡后电机输出转矩峰值(图11)为平衡前输出转矩峰值(图12)的20%,小臂平衡后电机输出转矩峰值(图13)为平衡前输出转矩峰值(图14)的26%,十字交叉双弹簧平衡机构对悬臂重力矩平衡效果显著。但是由图11和图13可知联动时大、小臂各自的运动会互相产生附加作用。小臂运动对大臂驱动电机会产生附加力矩,附加力矩与小臂自重是否平衡无关。小臂运动过程中大臂附加力矩与小臂的运动规律有关,小臂加速度越大、大臂关节产生的附加力矩越大,反之亦然。因此十字交叉双弹簧平衡机构只对悬臂重力产生的负载起作用,而对由于运动零部件运动时自身运动惯量产生的动载荷无平衡效果。

图12 联动无平衡机构时大臂驱动电机输出转矩Fig.12 Output torque of big arm drive motor without balance mechanism while coordinated movement
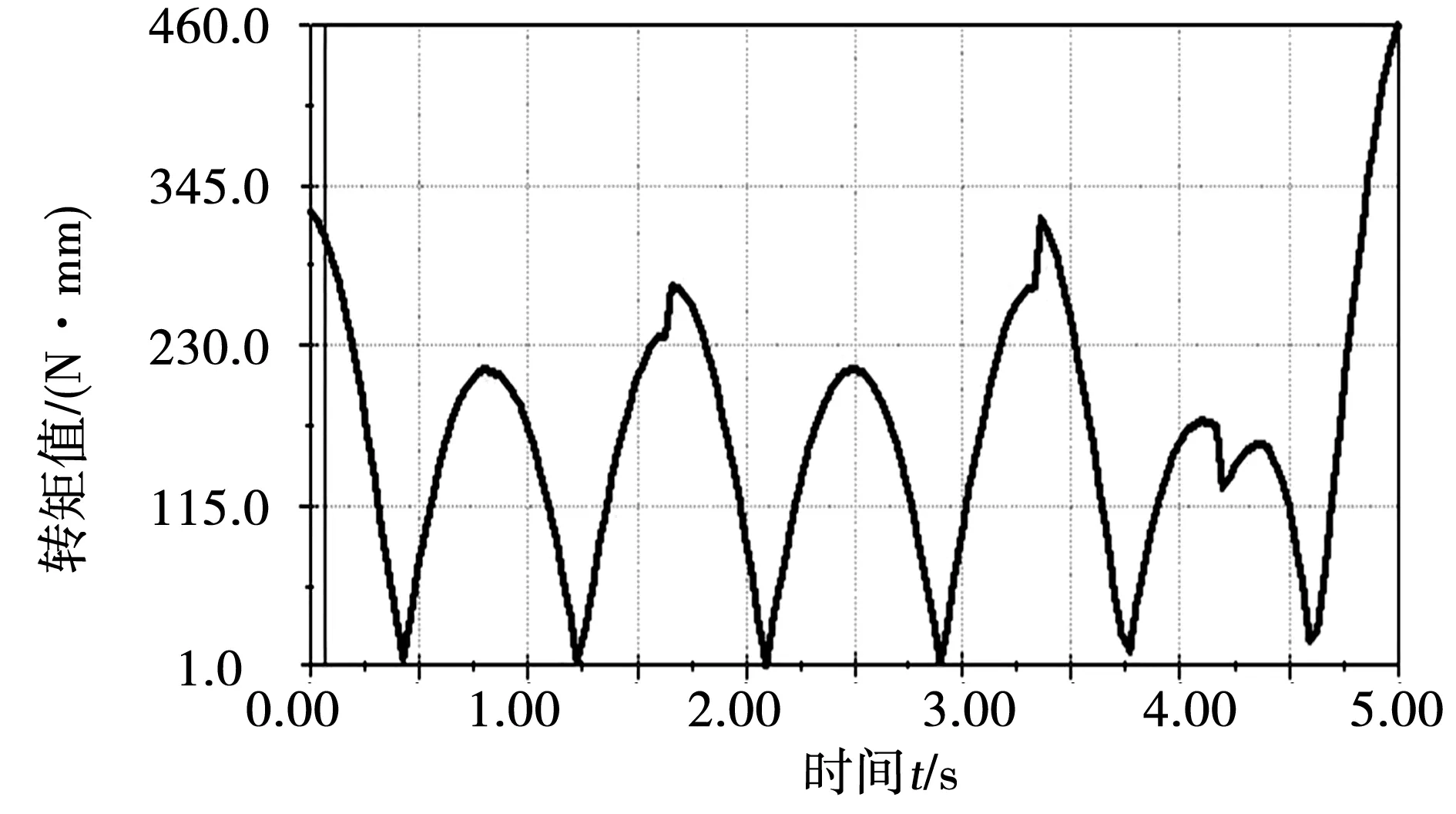
图13 联动有平衡机构时小臂驱动电机输出转矩Fig.13 Output torque of forearm drive motor with balance mechanism while coordinated movement

图14 联动无平衡机构时小臂驱动电机输出转矩Fig. 14 Output torque of forearm drive motor without balance mechanism while coordinated movement
4 负载平衡实验
为了验证十字交叉双弹簧机构对悬臂重力矩的平衡效果,分别进行了末端水平负载1 kg、竖直负载1 kg和水平竖直复合负载各1Kg情况下的平衡实验。图15所示为悬臂式前列腺粒子植入机器人实验系统。实验结果如图16、图17和图18所示。

图15 悬臂式前列腺粒子植入机器人实验系统Fig.15 Experimental system of cantilevered prostate seed implantation robot
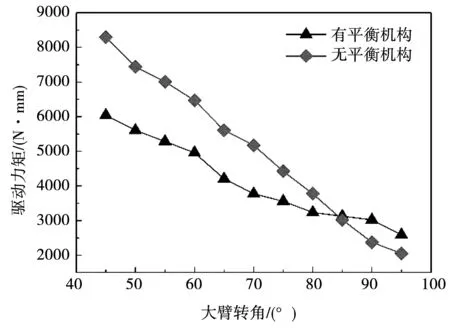
图16 竖直负载1 kg时大臂转角与驱动力矩的关系Fig.16 Relationship between drive torque and big arm angle with vertical load 1 kg
由实验结果可知,十字交叉双弹簧平衡机构使得大臂从45°运动到90°这个过程中所需力矩均降低了2 000 N·mm左右,图19(b)甚至降低了接近3 000 N·mm,所加力矩幅值波动也大大减小。其中,加载力矩的降低说明关节力平衡系统平衡了悬臂的重力矩,幅值波动的减小说明关节力平衡系统提高了整体结构的稳定性,所以设计的关节力平衡系统达到了目的。

图17 水平负载1 kg时大臂转角与驱动力矩的关系Fig.17 Relationship between drive torque and big arm angle with horizontal load 1 kg

图18 复合负载时大臂转角与驱动力矩的关系Fig.18 Relationship between drive torque and big arm angle with horizontal and vertical complex load 1 kg respectively
5 结 论
由于手工操作的不确定性很难保证粒子植入的定位精确度,提出采用机器人实现粒子植入手术,进行了悬臂式粒子植入机器人的设计。在对力平衡机构分析的基础上,在大小臂的回转关节处设计了十字交叉双弹簧平衡机构来平衡悬臂产生的重力矩,建立了悬臂式前列腺粒子植入机器人重力矩平衡的数学模型。利用Solidworks/Motion模块对引入十字交叉双弹簧平衡机构的悬臂式前列腺粒子植入机器人进行了运动仿真,仿真结果表明十字交叉双弹簧平衡机构使得大臂的所需最大输出转矩降约为平衡前的5.7%、输出转矩幅值波动范围仅为平衡前的0.8%,小臂电机输出转矩峰值降低了78.48%,大小臂联动时大臂转矩峰值约为平衡前的20%,小臂转矩峰值约为平衡前的26%。基于悬臂式前列腺粒子植入机器人实验系统,分别进行了末端水平负载1 kg、竖直负载1 kg和水平竖直复合负载各1 kg情况下的平衡实验,实验结果表明十字交叉双弹簧平衡机构使得悬臂式前列腺粒子植入机器人大臂从45°运动到90°过程中所需力矩降低了2 000 N·mm,力矩幅值波动也大大减小。悬臂式前列腺粒子植入机器人达到了设计时的预期目标,实现了重力矩的平衡。
[1] LIAO A Y, WANG J J, WANG J D, et al. Relative biological effectiveness and cell-killing efficacy of continuous low-dose-rate 125I seeds on Prostate carcinoma cells in vitro [J]. Integrative Cancer Therapies, 2010, 9(1): 59-65.
[2] PODDER T K, BEAULIEU L, CALDWELL B, et al. AAPM and GEC-ESTRO guidelines for image-guided robotic brachytherapy: report of ask group 192 [J]. Medical Physics, 2014, 41(10): 101501.
[3] STRASSMANN G, OLBERT P, HEGELE A, et al. Advantage of robotic needle placement on a prostate model in HDR brachytherapy [J]. Strahlentherapie Und Onkologie, 2011, 187(6): 367-372.
[4] PODDER T K, BUZUROVIC I, HUANG K, et al. Reliability of EUCLIDIAN: an autonomous robotic system for image-guided prostate brachytherapy [J]. Medical Physics, 2011, 38(1): 96-106.
[5] 郭杰, 姜杉, 冯文浩, 等. 基于核磁图像导航的前列腺针刺手术机器人[J]. 机器人, 2012, 34(4): 385-392. GUO Jie, JIANG Shan, FENG Wenhao, et al. A robot for prostate needle insertion surgery based on MRI-guidance [J]. Robot, 2012, 34(4): 385-392.
[6] SU Hao, SHANG Weijian, COLE G, et al. Piezoelectrically actuated robotic system for MRI-guided prostate percutaneous therapy [J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(4): 1920-1932.
[7] RUSSO S, DARIP P, MENCIASSI A. A novel robotic platform for laser-assisted transurethral surgery of the prostate [J]. IEEE Transactions on Biomedical Engineering, 2015, 62(2): 489-500.
[8] CHEN L,PAETZ T, DICKEN V, et al. Design of a dedicated five degree of-freedom magnetic resonance imaging compatible robot for image guided prostate biopsy [J]. Journal of Medical Devices, Transactions of the ASME, 2015, 9(1): 015002.
[9] STOIANOVICI D, KIMC H, SRIMATHVEERAVALLI G, et al. MRI-safe robot for endorectal prostate biopsy [J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(4): 1289-1299.
[10] PISLA D, PLITEA N, GALDAU B, et al. Innovative approaches regarding robots for brachytherapy[J]. Mechanisms and Machine Science, 2014, 20: 63-77.
[11] ELAYAPERUMAL S, CUTKOSKY M R, RENAUDD P, et al. A passive parallel master-slave mechanism for magnetic resonance imaging-guided interventions [J]. Journal of Medical Devices, Transactions of the ASME, 2015, 9(1): 011008.
[12] 王宏民, 杜志江, 闫志远, 等. 混联式主操作手重力补偿算法[J]. 机器人, 2014, 36(1): 111-117. WANG Hongmin, DU Zhijiang, YAN Zhiyuan, et al. Gravity compensation algorithm for hybrid master manipulator [J]. Robot, 2014, 36(1): 111-117.
[13] 刁燕, 陈章平, 罗华, 等. 基于计算力矩的微创手术机器人控制[J]. 控制工程,2011, 11(5): 780-782. DIAO Yan, CHEN Zhangping, LUO Hua, et al. Minimally invasive surgical robot control based on computing torque [J]. Control Engineering of China, 2011, 18(5): 780-782.
[14] 薛方正, 厚之成, 李秀敏, 等. 欠驱动机器人的切换姿态优化及全局稳定控制[J]. 仪器仪表学报, 2012, 33(5): 1035-1040. XUE Fangzheng, HOU Zhicheng, LI Xiumin, et al. State switching optimization and global stability control strategy for underactuated two-link manipulator [J]. Chinese Journal of Scientific Instrument, 2012, 33(5): 1035-1040.
[15] BASSAN H S, PATEL R V, MOALLEM M. A novel manipulator for percutaneous needle insertion: design and experimentation [J]. IEEE/ASME Transactions on Mechatronics, 2009, 14(6): 746-761.
[16] LIN Poyang, SHIEH W B, CHEN D Z. A theoretical study of weight-balanced mechanisms for design of spring assistive mobile arm support (MAS) [J]. Mechanism and Machine Theory, 2013, 61: 156-167.
[17] 罗杨宇, 李金泉, 王健美, 等. 人机合作机器人重力平衡设计[J]. 机器人, 2006, 28(5): 540-543. LUO Yangyu, LI Jinquan, WANG Jianmei, et al. Gravity balance design for cobot [J]. Robot, 2006, 28(5): 540-543.
(编辑:贾志超)
Gravitational torque balance analysis and experimentation of cantilevered prostate seed implantation robot
JIANG Jin-gang1, 2, LI Bin1, ZHANG Yong-de1, 2, DU Hai-yan1, 2, WANG Xiao-fei2, XU Yong3
(1. Robotics & its Engineering Research Center, Harbin University of Science and Technology, Harbin 150080, China;2. Intelligent Machine Institute, Harbin University of Science and Technology, Harbin 150080, China;3. Chinese PLA General Hospital, Beijing, 100853 China)
Prostate cancer is the common malignant tumor in male urinary system. Prostate cancer radioactive particles implantation by the perineum is the safe and effective treatment for organ confined early low-risk prostate cancer. The traditional particle implantation is done manually by doctor. Because of the uncertainty of the manual operation, it is difficult to guarantee the positioning accuracy of particle implantation. A robot was presented to realize the particles implantation surgery. Pose accuracy control ability of robot was used to solve the low positioning accuracy caused by the uncertainty of manual operation. Cantilevered prostate seed implantation robot was designed. Gravitational torque generated by the cantilever structure influenced the movement stability of the robot. On the basis of the analysis of force balance mechanism, cross double-spring balance mechanism was designed in the rotary joints of forearm and big arm in order to balance the gravitational torque. Gravitational torque balance mathematical model of cantilevered prostate seed implantation robot was established. Motion simulation of cantilevered prostate seed implantation robot with cross double-spring balance mechanism is performed using solidworks/motion module. Based on the experimental system of the cantilevered prostate seed implantation robot, balance experiment with the horizontal load 1 kg, vertical load 1 kg and horizontal and vertical complex load 1 kg are respectively conducted. The simulation and experimental results show that the cantilevered prostate seed implantation robot achieves the expected design requirement, and implements the gravitational torque balance.
prostate seed implantation robot; cantilevered; gravitational torque; balance analysis; cross double-spring mechanism
2015-12-10
国家自然科学基金(51675142);教育部博士点基金项目(20122303110006);黑龙江省自然科学基金(E201448);哈尔滨理工大学青年拔尖创新人才培养计划项目(201509)
姜金刚(1982—),男,博士,副教授,硕士生导师,研究方向为医疗机器人; 李 斌(1988—),男,硕士研究生,研究方向为机器人机构设计; 张永德(1965—),男,博士,教授,博士生导师,研究方向为医疗机器人、仿生机器人; 杜海艳(1975—),女,博士,副教授,研究方向为微创介入机器人; 王晓飞(1985—),男,硕士,研究方向为机器人机构设计; 许 勇(1971—),男,硕士,副主任医师,研究方向为前列腺癌诊断和粒子植入治疗。
姜金刚
10.15938/j.emc.2016.12.014
TP 242;TH 789
:A
:1007-449X(2016)12-0109-08
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
中国特种设备安全(2019年3期)2019-04-22
摄影之友(影像视觉)(2017年11期)2017-11-27
载人航天(2016年4期)2016-12-01
山东工业技术(2016年15期)2016-12-01
凿岩机械气动工具(2016年2期)2016-11-11
综合智慧能源(2014年1期)2014-09-10