基于激光三角法的同步扫描形貌测量传感器*
2017-01-12 05:57任永杰杨凌辉林嘉睿
传感技术学报 2016年12期
苏 涵,任永杰,杨凌辉,林嘉睿,郭 寅
(天津大学精密测试技术及仪器国家重点实验室,天津300072)
基于激光三角法的同步扫描形貌测量传感器*
苏 涵,任永杰*,杨凌辉,林嘉睿,郭 寅
(天津大学精密测试技术及仪器国家重点实验室,天津300072)
为了克服传统的激光三角非同步物体形貌测量传感器,在深度方向的测量精度和横向测量视场相互制约的固有缺点,设计了一种新型的激光同步扫描物体形貌测量传感器。传感器以激光三角测量法为基本原理,通过所设计的光路系统,实现激光投射方向与相机成像方向的同步扫描。本文研制了基于高速旋转的十二面转镜和线阵CCD相机为主体的实验样机,实现了测量深度方向和横向视场的相互独立,并结合精密电控位移导轨和激光跟踪仪等搭建了实验系统平台。在传统非参数标定方法基础上,提出了一种适用于该传感器的映射标定方法,能够准确快速的标定该传感器。系统利用激光跟踪仪进行比对实验验证,结果表明:单点重复性小于0.07 mm,测量精度优于0.25 mm。测量传感器具有精度高、速率快、稳定性好等优点,对于物体表面形貌快速精密测量有着广泛的应用前景。
激光三角法;形貌检测;非参数化模型标定方法;线阵CCD;同步扫描
随着现代工业制造业和信息技术的高速发展,智能制造对精密测量提出了新的要求。在现代工业的大环境下,在线检测技术已经得到了广泛的应用,其中物体表面形貌检测更是成为一个重要的环节[1]。现行广泛使用的表面测量仪器可以分为两大类,一类是接触式测量仪器,如三坐标测量机,这类仪器测量精度高,测量速度慢,可能破环被测物表面特性,同时会造成接触测头的变形,从而影响测量的稳定性;另一类是非接触式测量仪器,如光学干涉测量、共焦显微技术等,主要以光电、超声波等技术为基础,这类仪器不会损伤物体表面,测量效率高,但与接触式测量仪器相比测量精度低[2-3]。其中激光三角测量方法以其结构简单,非接触式测量,测量精度高,测量速度快,测量范围可调控而得到广泛应用。最近几年,激光三角测量方法在质量监控、产品的三维重构等方面更是发挥了重要的作用。
传统的激光三角测量方法一般采用单点激光和线结构光两种方式[4]。单点激光三角法位移传感器的测量距离是可选的,其测量精度高、稳定性强、结构简单,但静态一维单点测量的灵活性不高,测量范围受到了极大的限制。线结构光法由于被测物体表面的深度变化而受到调制,并且需要搭载二维的面阵CCD来获取发生畸变的激光条图像,这种传感器测量视场大,量程大,但是其存在固有局限性,传感器深度方向的测量精度和横向测量视场受传感器本身几何结构限制而相互制约[5-6]。
为了克服线结构光方式的缺点,并结合单点激光方式的优点,达到更好的测量效果和更强的适应性,本文以激光三角同步扫描物体形貌测量方法为基础,研制了一种新型的激光同步扫描物体形貌测量传感器,以满足了高速率、高稳定性、高精度的先进测量要求。基于激光三角法测量原理,设计了满足Scheimpflug理想成像条件的光路,建立了机械结构模型;通过电机来带动十二面转镜转动,从而达到扩大出射光束角度和实现激光三角法出射光束和散射成像光束的精准同步[7];运用一种改进的非参数标定方法来标定传感器,并运用FPGA精准控制线阵CCD;搭建了实验平台,验证了整套测量系统的可行性、稳定性和精度。
1 传感器结构设计
激光同步扫描物体形貌测量传感器由线阵CCD相机、光学系统、高速旋转的十二面棱镜和控制系统等部分组成,如图1所示为转置的核心。出射激光束的质量影响了测量精度,传感器选用半导体激光器作为光源,利用光纤准直器对出射光束进行准直,具有出射光束发散角小、亮度稳定等特点。激光器发射的激光经过准直器准直后,先后被反射镜1和十二面棱镜两次反射,照射到物体表面形成光斑,构成光学系统的出射部分。光斑在物体表面发生散射后,又先后经过十二面棱镜、反射镜1和反射镜2的三次反射后,汇聚到镜头成像于线阵CCD相机,构成光学系统的接收部分。传感器对光路一共进行了五次折叠,不仅节省了光路空间,而且达到了激光投射方向与相机光轴方向横向同步扫描的目的。同步扫描具有瞬时视场远小于传统激光三角法、抗环境光能力强的特点,从而被广泛应用于复杂的空间光环境下的测量[8]。成像器件选用工业线阵CCD传感器,具有体积小、精度高、稳定性强等特点,较于面阵CCD传感器由二维空间变成一维空间,因而受激光的多重反射和环境光的影响小,同时像元数量和成像视场宽度都优于面阵CCD传感器。
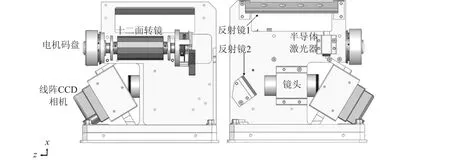
图1 传感器系统示意图
对于二维表面形貌测量,一种快速、稳定、动态性好的扫描机构是非常重要的[9]。传感器中的十二面棱镜与一个高速度高稳定性的电机紧密配合,通过2 500线的码盘来实现对十二面棱镜角度的精准定位。传感器采用激光三角法横向同步扫描技术,通过机械结构的设计来实现同步地扫描系统投影光线和成像光轴[10]。对于某一时刻,棱镜的同一面可以精准的同步扫描出射激光束和物体反射的成像光束,在电机带动下,每个时刻都有一个点光束陆续地射出,同时被线阵CCD传感器一一捕获。测量传感器的水平视场和竖直视场相互独立,水平视场由线阵CCD传感器和光学几何机构决定,竖直视场由十二面棱镜和电机构成的扫描机构决定,从而解决了传感器深度方向的测量精度和横向测量视场受传感器本身几何结构的限制相互约束的问题,适合针对于各种特殊测量场合的需求进行独立设计。本系统主要设计指标见表1,测量视场示意图如图2所示。
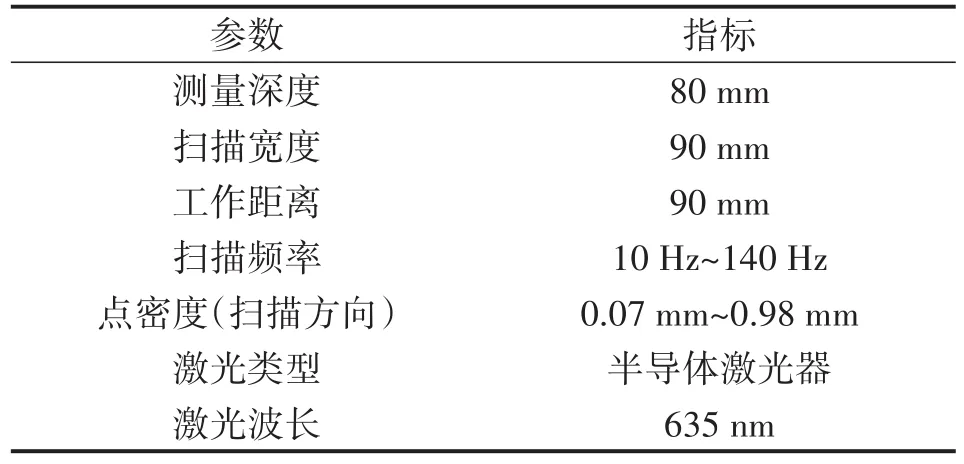
表1 测量系统主要技术指标
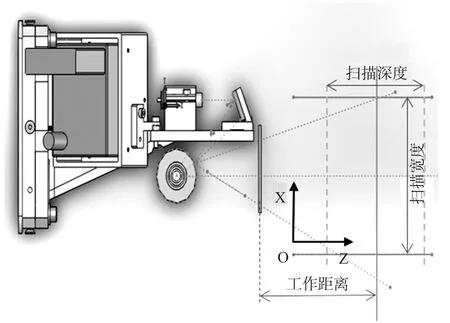
图2 测量视场示意图
系统的控制部分包括基于FPGA的信号控制电路、图像采集卡的图像采集电路、电机控制器的电机模块以及相关的辅助电路组成,能够实时采集光斑图像,完成光斑信息的提取和识别,以及物体表面光斑坐标的解算。
2 测量原理分析
在测量过程中,系统通过线阵CCD传感器来获得一维方向上的位置坐标,利用非参数标定方法对每条扫描激光束进行标定,得到激光束在系统坐标系下的直线方程,再通过已知一维方向上的坐标和激光束直线方程,进而可以求得物体表面激光点的位置坐标。
2.1 三角法测量原理
该传感器的基本测量原理为激光三角法。激光三角法[11]结构简单、测量实时性好,在工业中的长度、距离和三维形貌等检测中应用广泛[12]。图3阐明了激光三角法的几何关系,激光二极管发射出激光束,经过准直系统以一定的角度聚焦到被测物体表面,激光在被测物体表面上发生散射。从另一角度上,物体表面上的散射激光经过接收透镜进行汇聚,最终散射光斑成像在线阵CCD上[13]。当被测物体表面的位置沿着激光轴方向发生改变时,在其表面上的散射光斑的位置也会发生变化,从而导致在线阵CCD上成像的位置发生变化,在CCD上的位移距离和物体实际的位移是一一映射的关系。通过计算线阵CCD上的光斑位移,来计算出物体的实际位移距离,从而实现用激光测量物体位移的目的。投影光束方向上的位移变化Δz可以通过计算成像点在线阵CCD上的位置变化Δp而得到。
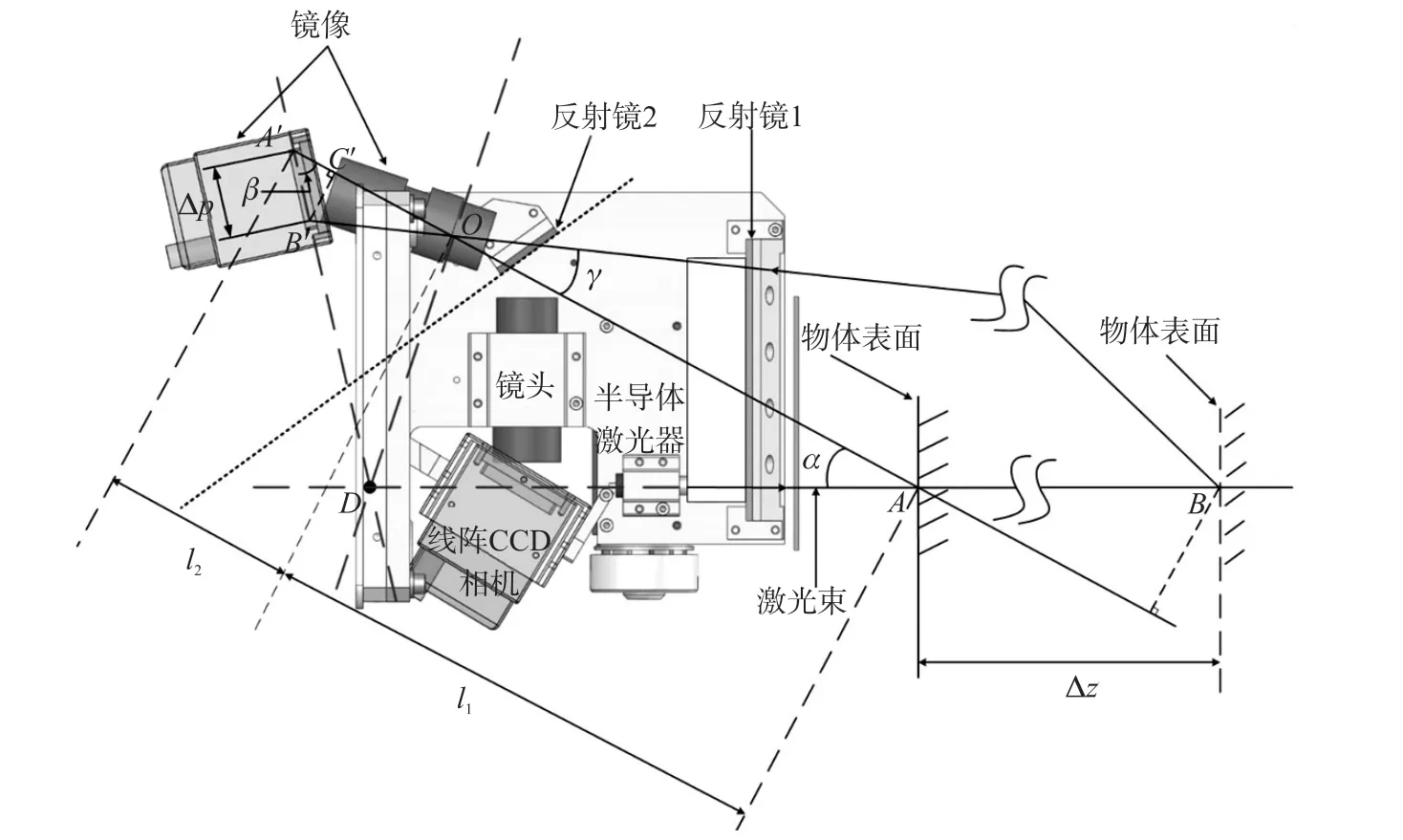
图3 激光三角法原理图
图3中,α是入射激光束DA与反射激光束AA′的夹角,β是反射激光束与线阵CCD感光面的夹角,l1是目标光点和接收透镜主平面之间的距离AO(物距),l2是目标光点在传感器上的物象和接收透镜主平面之间的距离A′O(像距),Δz为物体表面的位移距离,Δp为光点在传感器上对应成像点的位移距离。由图3可得几何关系:

又知BC=AB·sinα=Δz∙sinα,B′C′=A′B′∙sinβ= Δp∙sinβ,AC=AB·cosα=Δz∙cosα,A′C′=A′B′∙cosβ=Δp∙cosβ,代入式(1)中,可得:

根据几何光学中的高斯定理,理想光学系统的成像条件满足:

其中l1为物距,l2为像距,f为透镜的焦距。将式(3)代入式(2)中,可得:

光路结构设计好后,式(4)中的α、β、θ、f、l1、l2都是已知量,通过计算像点在线阵CCD上的位移量Δp,就可得到投影光束方向上的物体位移Δz,而且Δz和Δp之间的变化关系是非线性的。
成像的清晰程度对数据的提取精度起着本质的影响,图像越清晰,提取出来的数据质量越好。为了达到理想成像效果,使被测物体表面在移动过程中,成像光点在线阵CCD上始终成清晰的物象点,系统的光路设计上,必须满足Scheimpflug理想成像条件。如图3所示,当激光束出射方向BD、接收透镜主平面OD、线阵CCD的感光面A′D的延长线交于一点D时,一定景深范围内的被测物点均可以在线阵CCD上清晰成像。
2.2 传感器标定方法
测量系统的精度依赖于系统的标定精度和稳定性。非参数标定方法非常适合影响系统精度的参数和模型难以确定的情况,本传感器中棱镜表面的缺陷、光学的几何畸变、环境光影响等其他非线性的未知影响因素,都是难以估量的。激光三角法同步扫描测量传感器的标定是指精确建立线阵CCD上光斑质心位置、扫描光束的索引值与传感器自身空间的坐标系之间的二维空间坐标映射关系[14]。
2.2.1Z轴方向上的标定
传感器Z轴方向上的标定方法如图4(a)。如图2中所示建立系统参考坐标系,定义激光扫描平面为OXZ坐标系平面,传感器的Z轴方向平行于传感器视场中央,X轴则在传感器的扫描平面内且垂直于Z轴。激光束的位置由电机码盘产生的脉冲来确定,码盘发出第i个脉冲时,激光器所发射的扫描光束li的索引值标记为i。在传感器视场内,利用一个垂直于Z轴的参考平面以一定的位移间隔依次移动到mj的位置,扫描光束li和参考平面mj处的交点为Pij,由于参考平面每次的位移量精确已知,所以交点Pij的Z坐标已知。此时再将交点Pij在线阵CCD上像点质心的坐标求出,即可得到质心坐标和交点Pij的Z坐标的对应关系。两个参考平面之间的Z值坐标通过线性插值的方法得到。
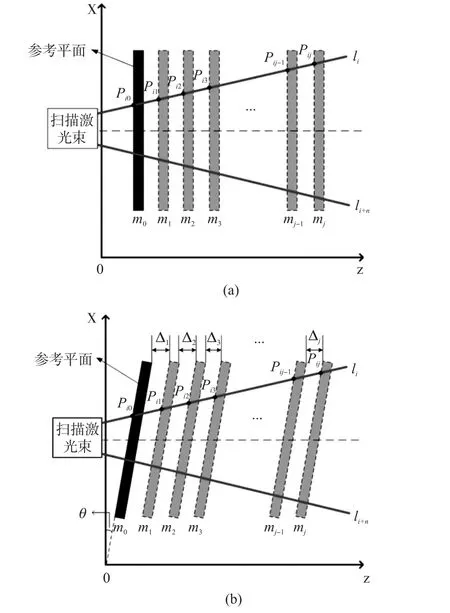
图4 系统标定原理图
2.2.2 传感器扫描光束方程的标定
扫描光束li和参考平面mj交点Pij的X轴方向坐标通过求解扫描光束li在OXZ坐标系的方程,根据确定的Z轴坐标,进而求得出X轴坐标。相比于传统的建立数学模型的标定方式,直接标定的方法更加精确[15]。如图4(b),将参考平面倾斜一定的角度θ,设定参考平面的初始位置m0的延长线交于原点O。对于扫描光束li和参考平面m0的交点Pi0,其Z轴坐标可以通过2.2.1节的方法得到,X轴坐标可以通过参考平面m0在OXZ坐标系的方程确定。参考平面m0的方程为:

同理,将参考平面在视场平面内沿Z轴方向平移j次,每次平移间隔Δj精确可知,则参考平面mj的方程为:

对于扫描光束li(i=1,2,…)在OXZ坐标系中共有j+1个已知坐标点Pij(j=0,1,…),通过最小二乘法拟合即可得到扫描光束li的直线方程。
Z轴坐标得到后,代入相应的光束方程中,可以得到X轴坐标,这样就建立好了二维空间坐标映射关系。如果想要获取三维空间坐标,还需要借助垂直于线阵CCD视场方向的一维精密导轨,提供Y轴方向上的位移作为坐标量;或者通过其他定位系统来得到传感器自身的位姿,进而得到测量时刻线阵CCD视场所在的Y轴坐标。Y轴方向的坐标是后期传感器和其他系统配合使用时,进一步需要研究的问题。就传感器自身而言,本文只研究X、Z轴二维空间。
3 实验验证
3.1 系统搭建
为了有效的验证激光同步扫描物体形貌测量传感器,在隔振平台上搭建了如图5所示的实验平台,可以有效的降低外界因素的干扰。整套实验系统包括激光同步扫描物体形貌测量传感器、电控位移导轨、激光跟踪仪、计算机、标定参考平面等。电控位移导轨固定在平台上,将一维转台和激光跟踪仪的靶镜固定在位移导轨上,一维回转平台分辨精度为1′,激光跟踪仪的空间长度最大测量不确定度为10 μm。在一维回转平台上将参考平面固定,这样参考平面不仅可以随着电控位移导轨直线运动,而且可以在一维回转平台的控制下,转动确定角度,实现了两个自由度的运动。激光扫描物体形貌测量传感器固定于一个三脚架上,并置于电控位移导轨的末端,通过调节三脚架,使激光扫描物体形貌测量传感器激光扫描线基本全部位于参考平面的中部,便于标定过程的实现。
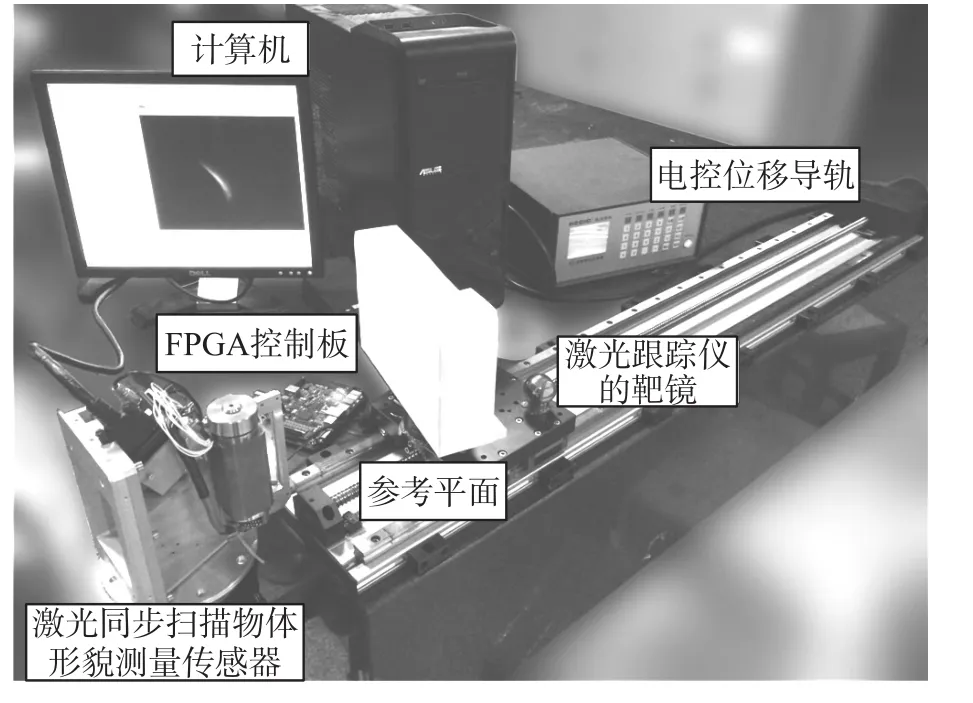
图5 实验系统示意图
具体的实验流程如下:电控位移导轨步进到指定位置上,用激光跟踪仪进行位移精密测量,然后采用激光扫描物体形貌测量传感器进行位置测量,并将测量结果传输给计算机进行解算,将实际测量结果与理论结果进行比较。在实验过程中,首先对激光扫描物体形貌测量传感器进行标定,参考平面分别以垂直于导轨运动方向和倾斜15°两种姿态下,让电控位移导轨以2 mm的步长做单步进给运动,对每个位置分别进行测量,解算出光束方程,再对被测物体进行测量,得到被测物体的表面信息。
3.2 测量实验
基于图5所示的实验系统,首先运用本文的标定方法建立激光同步扫描物体形貌测量传感器坐标系下的Z轴和激光光束方程。为了验证测量系统的质心定位稳定性,让系统运行后,每间隔2 h对同一位置的参考平面进行多次测量,对于索引值为1 200~1 320激光束的测量数据的Z轴坐标进行对比,求取质心位置的方差(见图6)。
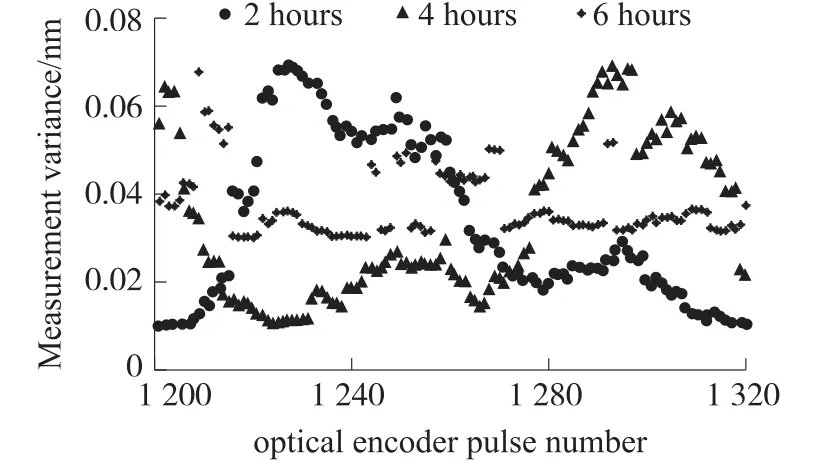
图6 光束索引值为1200~1320激光束测得质心位置的方差分布图
然后将参考平面分别置于测量范围的4个位置,进行多次测量求平均,计算前后两个位置(Z1、Z2)的距离差DS与激光跟踪仪测量的值TS进行比较,此差值Δd作为衡量系统Z轴方向的精度参考。
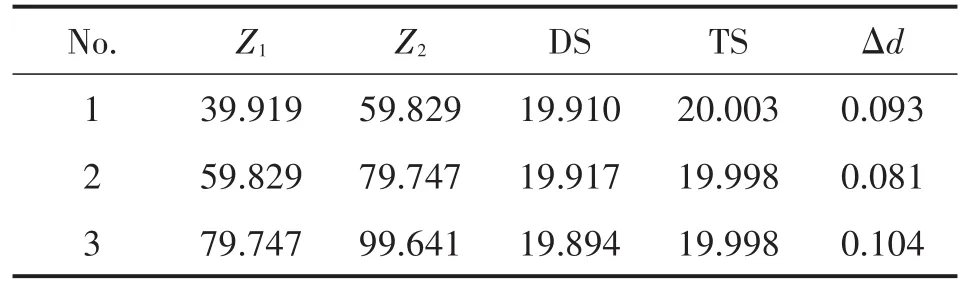
表2Z轴精度实验数据 (mm)
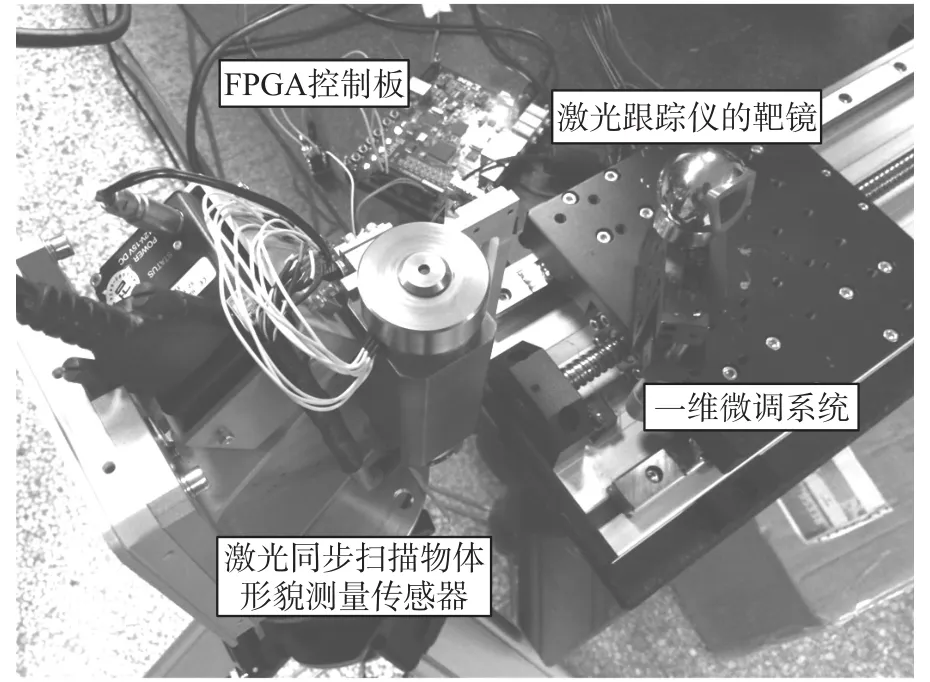
图7X轴精度实验
按照图7所示的方法,利用跟踪仪的标准靶镜作为基准,放置于一个一维微调系统上,利用激光同步扫描物体形貌测量传感器多次测量该位置的靶镜,对多次测量值求均值,得到第一组测点数据,然后微调靶镜高度,再次测量此时调整位置后的靶镜,得到第二组测点数据,多次调解高度后,根据多组测点数据拟合出球如图8所示。其中Y轴方向上的坐标通过一维微调系统和每组测点拟合出的圆直径求得。拟合球的半径为19.283 mm,球心XZ坐标为(53.296,42.498),与靶镜的半径标准值19.05 mm进行比较,误差为0.233 mm,此误差作为衡量X轴方向上的精度参考。
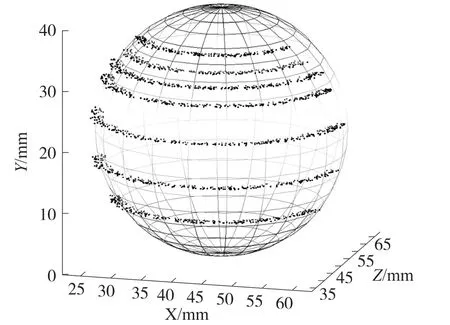
图8 拟合球
最初设计传感器模型时,理论的设计精度小于0.05 mm。实验结果表明,实际精度与理论精度相比有一定差距,主要是由于激光光强非实时调制带来的目标光斑的提取误差、机械加工精度和安装过程带来的误差、质心提取误差和球形拟合误差等造成。针对于这些误差,有待进行更深一步的研究,例如将现有恒定激光源改进成实时激光点能量追踪的自适应激光源,提高机械件加工精度,增设更多的微调机构来精确调整光路和对图像提取算法进行优化等。
4 结论
本文基于激光三角法的原理,通过机械结构的设计来满足光路的需求,设计了一种新型的物体形貌测量传感器,介绍了传感器的结构和工作原理,并给出了传感器的标定方法,构建了实验样机。为了验证传感器,搭建了基于激光扫描横向同步的物体形貌测量实验平台,并且利用跟踪仪进行精度验证。实验结果表明,系统的稳定性强,在80 mm×90 mm的视场范围内,系统的测量精度优于0.25 mm。传感器装置基本满足最初设计要求,设计方案可行。
[1]叶声华,曲兴华,殷纯永,等.现代制造质量的关键测量技术基础[J].计量学报,2000,21(2):95-99.
[2]张舜德,朱东波,卢秉恒.反求工程中三维几何形状测量及数据预处理[J].机电工程技术,2001,30(1):7-10.
[3]黄佳,邾继贵,王一.激光线扫式形貌测量机器人的标定研究[J].传感技术学报,2012,25(1):62-66.
[4]Halioua M,Liu H C.Optical Sensing Techniques for 3-D Machine Vision[C]//Quebec Symposium International Society for Optics and Photonics,1986:150-161.
[5]Ribo M,Brandner M.State of the Art on Vision-Based Structured Light Systems for 3D Measurements[C]//Robotic Sensors:Robotic and Sensor Environments,2005.International Workshop on.IEEE,2005:2-6.
[6]张广军.视觉测量[M].北京:科学出版社,2008:73-134.
[7]Samson C,English C E,Deslauriers A M,et al.Imaging and Tracking Elements of the International Space Station Using a 3D Auto-Synchronized Scanner[J].European Journal of Pharmacology,1990,183(6):2433-2434.
[8]刘顺涛,骆华芬,陈雪梅,等.结构光测量系统的标定方法综述[J].激光技术,2015,39(2):252-258.
[9]李翔.三维成像技术及高精度快速三维成像系统研究[J].现代电子技术,2006,29(12):112-114.
[10]唐圣彪,屠大维.激光同步扫描三角测距成像系统的理论分析[J].光电子·激光,2001,12(6):587-591.
[11]Oka T,Nakajima H,Tsugai M,et al.Development of a Micro-Optical Distance Sensor[J].Sensors&Actuators a Physical,2003,102(3):261-267.
[12]王金桥,段发阶,伯恩,等.线结构光扫描传感器结构参数一体化标定[J].传感技术学报,2014(9):1196-1201.
[13]Xia L,Chen P,Wang Y,et al.Three-Dimensional Measuring Technique for Surface Topography Using a Light-Sectioning Microscope[J].Applied Optics,2012,51(8):1162-1170.
[14]邾继贵,于之靖.视觉测量原理与方法[M].北京:机械工业出版社,2012:99-111.
[15]Li X,Zhao H,Liu Y,et al.Laser Scanning Based Three Dimensional Measurement of Vegetation Canopy Structure[J].Optics& Lasers in Engineering,2014,54(1):152-158.

苏 涵(1990-),男,湖北枣阳人,天津大学精密测试技术及仪器国家重点实验室硕士研究生,主要从事激光及光电测试技术的研究,suhan@tju.edu.com;

任永杰(1975-),男,河北河间人,博士,天津大学副教授,主要从事激光及光电检测、视觉检测技术、机器人控制及机器人测量技术方面的研究,yongjieren@ tju.edu.cn。
Synchronously Scanning Sensor Based on Laser Triangulation for Measuring Surface Profile*
SU Han,REN Yongjie*,YANG Linghui,LIN Jiarui,GUO Yin
(State Key Laboratory of Precision Measuring Technology and Instruments,Tianjin University,Tianjin300072,China)
A novel synchronized laser scanning sensor is designed to alleviate the trade-off between the field of view and the range precision,which is the inherent deficiency of the conventional triangulation measuring sensor.With the design of optical system,sensor based on laser triangulation achieves to synchronously scan in laser projection direction and the camera optical axis direction.On the basis of that,experimental prototype consisted of a highspeed rotating polygon mirror and linear CCD camera is developed to solve the problem of restriction between the depth direction and the transverse field.The experimental platform combined with electronically controlled precision displacement guide and laser tracker is established.A rapid and accurate calibration method based on the traditional non-parametric model is proposed using lookup tables.Compared with the laser tracker for verification,the single point repeatability accuracy is within 0.07 mm and measurement accuracy is better than 0.25 mm.This results show that measurement sensor has the advantages of high precision,fast speed and good stability and it has a broad application prospect for fast surface profile precision measurement.
Laser triangulation method;Shape measurement;Non-parametric model calibration method;Linear CCD;Synchronized scanner
TH741
A
1004-1699(2016)12-1791-06
��7320P
10.3969/j.issn.1004-1699.2016.12.002
项目来源:国家重大科学仪器设备开发专项子任务项目(2013YQ35074702);国家自然科学基金项目(51475329)
2016-05-24修改日期:2016-06-27
猜你喜欢
现代电子技术(2022年18期)2022-09-17
阅读(科学探秘)(2022年5期)2022-06-07
科学技术创新(2021年25期)2021-09-11
奥秘(2021年3期)2021-04-12
汽车维修与保养(2020年11期)2020-06-09
中国医疗设备(2019年1期)2019-01-15
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年3期)2016-11-07
传感技术学报(2016年6期)2016-09-09