
浅析车牌定位系统中二值滤波处理
2017-03-27 14:02刘敏
电脑知识与技术 2017年3期
刘敏
摘要:随着社会水平发展以及城市生活节奏的加快,城市交通的各类问题越来越突出,政府急需运用各种高科技手段解决道路交通拥堵问题,提高交通管理效率,因此对自动化车牌定位系统需求很急切。车牌定位系统主要以图像处理为基础最终达到车牌准确定位的,该文主要对图像处理中的图像灰度线性变换、二值化处理、削弱背景干扰、自定义模板中值滤波做进一步分析。
关键词:车牌定位;车牌自动识别;滤波;图像
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2017)03-0175-02
1 概述
车牌自动识别可以大幅度提高交通效率,在很多领域有广泛的应用场景,比如:高速收费站不停车自动识别收费、停车场管理自动化、查寻失窃车辆、控制车辆限行、抓拍交通违章等等,然而,车牌的定位技术却是车牌自动识别的重要技术基础和环节,准确、快速的车牌定位是提高车牌自动识别准确率和可应用性的主要保证和技术基础。
车牌定位系统可采用灰度阈值法进行车牌定位,主要以图像处理为基础,依据车牌尺寸、文字等的特征,对图像做空间域处理,像素处理方式包括点处理和区域处理,最终达到车牌准确定位的目的,这种方法简单、快速、准确、易行,在多次、反复的试验中证明了其在实践上的可用性。
车辆牌照的定位系统可由三个部分构成,第一部分预处理:把彩色图(Color Image)转换成比较方便处理的灰度图(Gray Image);第二部分滤波并进行二值化:把灰度图(Gray Image)做一系列处理、滤波等得到二值化图(Binary Image),其中主要内容已经是车辆牌照目标信息图像;第三部分分割:将含有车辆牌照目标信息的二值化图(Binary Image)进行定位、分割、截取,得到车辆牌照目标信息的区域分割图。
2 灰度线性变换处理
在做图像灰度前,如果采集设备采集到的目标图像图像模糊不清,主要原因是图像的对比度不够,导致视觉效果不理想,这时还必须使用图像效果增强方法来改善图像,使图像的显示效果更加理想,保证定位准确率。灰度处理这里将采用灰度线性变换的方法。
灰度线性变换如下述所示:
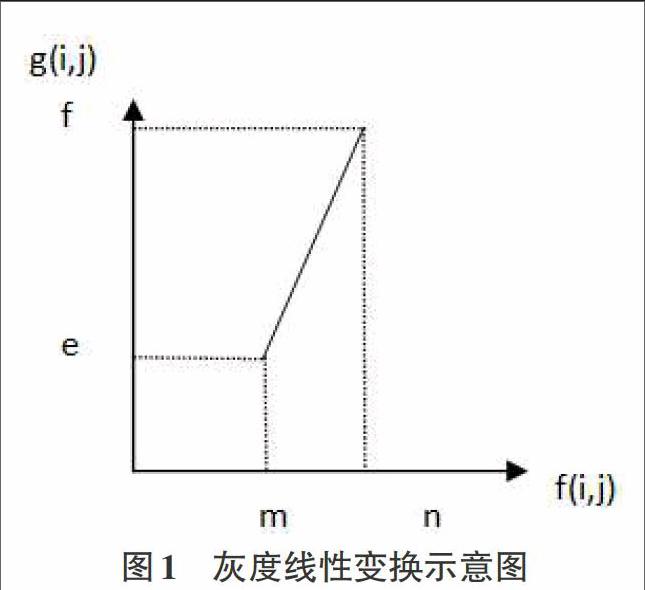
若g(i,j)=A[f(i,j)]是一个线性单值函数,则称g(i,j)是f(i,j)经过A后的线性变换。设输入图像f(i,j)的灰度值域为[m,n],經过变换后目标图像g(i,j)的灰度值域为[e,f],如图1所示:
图1 灰度线性变换示意图
g(i,j)和f(i,j)之间的变换关系为:
g(i,j)=(f-e)/(n-m)*f(i,j)+e
设k=(f-e)/(n-m),则g(i,j)=k*f(i,j)+e
参数k为线性函数斜率,e为截距,f(i,j)为输入灰度,g(i,j)为输出灰度。当k>1时,增加图像对比度;当k<1时,减小图对比度;当k=1,e!=0时,改变图像亮度;如果k=1,e=0时,输出图像保持原样;当k=-1,e=255时,输出灰度反转。
3 图像的二值化处理
由灰度线性变换得到的灰度图像的黑白效果是由像素的灰度值高低决定的,为了得到更清晰的图片,需要将灰度图中的像素按照特定的方法分为两种颜色值,即图像二值化。图像二值化有一些较成熟的算法,例如自适应阈值法。在自适应阀值法中阀值选取主要是根据车牌颜色特征——车牌文字为白色(只考虑小型汽车1992式车牌),阀值选取为:
threshold =Gmax-(Gmax-Gmin)/3
其中Gmax是最高灰度值,Gmin是最低灰度值,该阀值对不一样的车牌有对应的适应性,能够使背景基本被置为0,以突出车牌的区域。事实上二值化实现了目标车牌与背景分割,将大部分背景像素置为0(黑色),而将车牌文字置为255(白色)。核心算法如下:
for(i=0;i { for(j=0;j { lpSrc=(unsigned char*)lpDIBBits+lLineBytes*(lHeight-1-i)+j; if((*lpSrc)< threshold) *lpSrc=0; else *lpSrc=255; } } 4 削弱背景干扰处理 通过上述的阀值二值化处理后我们的图像会有大部分白色连通区域,但仍然有背景干扰,这是由于部分背景灰度值与车牌字符灰度值相近,在阀值分割时将这部分背景灰度值也置为255造成的,这里采用横向相邻像素灰度值相减法削弱这种背景干扰,其公式表示为: f(i,j)=f(i,j)-f(i,j+1) 原图像亮度变化率可有其公式中相减的结果反映出来:像素灰度值差的大小和得到的像素值高低成正比。像素灰度值差大的对应的像素点值为255,反之,没有改变的区域减后像素值是0。这种方法使得图像的垂直边缘得到了加强,符合车牌文字基本上为短竖线的特征(之所以没有采用纵向相邻像素灰度值相减法就因为此),事实上是对灰度图像用差分近似计算进行横向微分。左边缘的一列像素值不予处理,整体效果没有受到影响。削弱背景干扰的处理核心算法如下: for(i=0;i {for(j=0;j {lpDst=(unsigned char*)lpNewDIBBits+lLineBytes*(lHeight-1-i)+j; lpSrc=(unsigned char*)lpDIBBits+lLineBytes*(lHeight-1-i)+j; fResult=(*lpSrc)-(*(lpSrc+1)); if(fResult<0) fResult=-fResult; if(fResult>255) *lpDst=255; else *lpDst=(unsigned char)fResult; }} 通过上次此处理后,我们得到的图像车牌信息更清晰,车牌之外的区域更模糊。这时的图像中有很多和车牌文字不相干的孤立噪声白点,需要滤波处理。后面将采用模板为(1,1,1,1,1)T的中值滤波进一步处理。 5 中值滤波处理 中值滤波技术是一种非线性滤波技术,由于图像噪声有比真实图像的像素数少、面积小特征,在一定条件下,可以克服线性滤波器所带来的图像边缘细节模糊,而且车牌文字基本上为短竖线的特征。综上所述,我们可知没有采用其他的滤波方式如均值滤波而采用模板为(1,1,1,1,1)T的中值滤波来滤出噪声点的原因。 6总结 通过对256级灰度图像做灰度线性变换、图像二值化、削弱背景干扰处理、中值滤波处理,最终得到包含车牌信息的目标图像(即除去了大部分干扰的二值化图像),最后再经过区域分割技术把包含有车牌信息的区域部分截取出来,从而提取出车牌号信息。 参考文献: [1] 廖金周,宣国荣.车辆牌照的自动分割[J].微型电脑应用,1997(4). [2] 杨冬卫.汽车车牌定位技术方法的探讨[J].南方农机,2015(3). [3] 常江.车辆图像局部识别[J].信息网络安全,2013(11). [4] 姜柏军,钟明霞.改进的直方图均衡化算法在图像增强中的应用[J].激光与红外,2014(6). [5] 彭静.一种改进的中值滤波去噪算法[J].中国科技博览,2011(1).
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
成都信息工程大学学报(2021年2期)2021-07-22
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
作文小学中年级(2020年6期)2020-07-24
测绘科学与工程(2017年5期)2017-05-07
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
自然资源遥感(2014年3期)2014-02-27
