
多移动机器人避障与协作避碰研究
2017-04-17 01:24邓计才孟森森张大伟
郑州大学学报(理学版) 2017年2期
邓计才, 孟森森, 王 佳, 张大伟
(郑州大学 信息工程学院 河南 郑州 450001)
多移动机器人避障与协作避碰研究
邓计才, 孟森森, 王 佳, 张大伟
(郑州大学 信息工程学院 河南 郑州 450001)
依据李雅普诺夫稳定性分析法,结合移动机器人的运动控制模型和避碰函数,设计了适合每个机器人的控制器.该控制器考虑了多移动机器人的轨迹跟踪与避障避碰.通过仿真实验进行了验证,实验结果表明该控制方法可有效地应用于多移动机器人的避碰和轨迹跟踪.
移动机器人; 李雅普诺夫稳定性分析; 避障; 协作避碰
0 引言
多移动机器人的路径规划既需考虑机器人的静态避障,又要考虑多机器人之间的协作避碰[1].避碰避障控制算法主要有:人工势场法、遗传模糊控制法、神经网络控制法、交通规则法和栅格法[2-4]等.文献[5]对传统人工势场法进行了改进,解决了单个机器人避障控制中的局部极小值问题,但未涉及多机器人之间的协作避碰.文献[6]结合遗传算法,通过模糊控制器的输出,实时调整每个机器人的线速度和角速度,提高了机器人的自主导航能力,但要构造全局模糊规则非常复杂.文献[7]用BP神经网络实现Q学习算法,解决了机器人的避障问题,该算法不需要先验知识,但需要在线或离线训练,占用大量系统资源,严重影响控制系统的实时性和收敛性.文献[8]中当多个机器人相互接近时,机器人沿同一方向(即逆时针方向)运动避开障碍物,该方法忽略了动态误差,可靠性较差.文献[9]提出了基于栅格法的多机器人路径规划方法,将其他机器人视为动态障碍物,根据删格值确定运动路径,缺陷是机器人数量越多算法越复杂.上述文献中的算法在一定程度上解决了机器人的避障避碰问题,但是对稳定性的分析还不够完善.
本文基于机器人的运动学控制模型和自定义的避碰函数,设计了一种用于多移动机器人避障避碰的控制器.在非完整约束下,该控制器同时考虑了机器人的轨迹跟踪和避障避碰.通过李雅普诺夫法分析了整个多移动机器人系统的稳定性,采用分布式控制方案,进行了多机器人的轨迹跟踪与协作避碰仿真实验.
1 控制策略和运动建模
在本文中,多移动机器人系统的整体控制策略是:在跟踪给定参考轨迹的同时,不与静态障碍物或其他机器人发生碰撞;机器人Ri的位姿、参考轨迹以及障碍物位置(或者其他机器人Rj,i≠j)三者决定了机器人Ri下一步的运动速度和角度;采用分布式控制方案,假设每个机器人知道自己的位姿信息,并且能够检测到一定范围内的任何物体.
在直角坐标系中,机器人Ri的位置、方向角、平移速度及旋转速度分别用(xi,yi),θi,vi,ui来表示,其中i=1,…,N.采用非线性常微分方程(组)运动学模型

2 多移动机器人避碰规划
为保证机器人在跟踪期望轨迹的过程中,能够实时检测并躲避障碍物及其他机器人,令pi=[xiyi]T,pj=[xjyj]T,其中xi∈R,yi∈R(i,j∈N, i≠j).
定义1 机器人Ri的避碰函数为
(1)
其中:R>0,r>0,并且R>r,R的是机器人检测半径,r是避碰半径(机器人与障碍物之间的最小距离);pi表示机器人Ri的坐标,pj表示机器人Rj的(或者静态障碍物)坐标.由式(1)可知,当机器人Ri与Rj的距离大于R时,F(pi)值恒为零,当两者距离大于r且小于R时,F(pi)值不为零.此函数在检测区域内有无限个取值,在检测区域以外值为零.
定义2 机器人Ri的避碰区和检测区为:Ζ={piT:(xi,yi)∈R2,‖pi-pj‖≤r},Λ={[piT:(xi,yi)∉Ζ,r<‖pi-pj‖≤R},令lij=‖pi-pj‖,对避障函数F(pi)求导,
(2)
机器人Ri的参考轨迹为(xri,yri),且其导数满足有界.Ri实际位姿与期望位姿的误差定义为exi=xi-xri,eyi=yi-yri,当(ξxi,ξyi) ≠(0,0)时.

(3)
由式(3)可知,θri由机器人Ri的参考位置、实际位置和障碍物位置共同决定,相对应的角度误差eθi=θi-θri.对受非完整约束的多移动机器人系统,做如下假设:


假设1意味着参考轨迹是一条连续且可导的曲线,角度误差满足的条件表明机器人不会发生90°急转.假设2意味着机器人在跟踪参考轨迹的过程中,如果遇到障碍物,会立刻冻结接收到的参考轨迹数据,优先处理避碰问题,一旦避碰结束,又会接收参考轨迹数据.
3 多移动机器人控制器设计

除避碰边界点,对V求导


其中:Kθi,Ki为增益参数,且都大于零.可通过提高增益参数的值减少跟踪误差.该控制器的设计综合了多机器人系统运动模型和定义的期望方向角θri,且满足上述假设1和2.



综上所述:无论是躲避障碍物(包括机器人)还是跟踪给定的参考轨迹都有dV/dt<0,所以该系统是渐近稳定的.
4 仿真与分析
本文通过两个仿真实验来验证多机器人系统避障与协作避碰算法的有效性.
仿真1 静态避障.
通过稳定性条件和参数灵敏度分析,得到公式(4)中的一组近似最佳参数为K1=1,Kθ1=10.在仿真中,机器人跟踪的参考轨迹为(xr(t),yr(t)).静态障碍物坐标为(xo,yo)=(2.6, 2),机器人初始位置为(x0,y0,θ0)=(3, 2, π),避碰与检测半径分别为r=0.1、R=0.2.单个机器人的参考轨迹为xr=2+0.55 cos(0.1t),yr=2+0.55 sin(0.1t). 利用所设计的控制器,机器人进行静态避障,其运动轨迹分别如图1-a(t=20 s时)、图1-b(t=80 s时)所示.其中实线是所给参考轨迹,虚线是机器人实际轨迹,*是障碍物.从图中可以看出,机器人在运动过程中前后成功进行了两次静态避障.
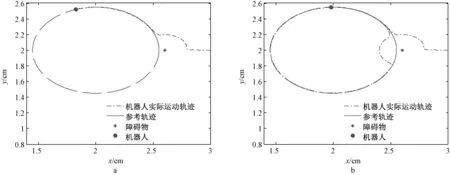
图1 静态避障运动轨迹
仿真2 协作避碰.
机器人R1的初始位置为(x1,0,y1,0,θ1,0)=(-6, 11, -π)、参考轨迹为xr1(t)=6+7 sin(0.1t+π),yr1(t)=12+7 sin(0.1t+π).机器人R2的初始位置为(x2,0,y2,0,θ2,0)=(26, 12, -π)、参考轨迹为xr2(t)=21+7 sin(0.1t),yr2(t)=12+7 sin(0.1t).检测和避碰半径分别为R=4、r=2.在连续运动情况下,机器人R1绕过静态障碍物,通过公式(4)调节跟踪误差,继续跟踪参考轨迹,如图2-a(t=20 s时)所示.当机器人R1、R2相互进入对方的检测区域时,优先处理它们相互之间的避碰问题,如图2-b(t=36 s时)所示,当避碰结束后继续跟踪各自的参考轨迹,如图2-c所示(t=50 s时).图2-d是整个实验连续的运动轨迹.
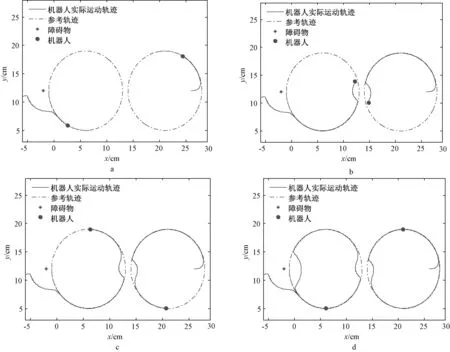
图2 协作避碰运动轨迹
5 总结
本文针对受非完整约束的多移动机器人系统进行了避障避碰研究,首先建立了多移动机器人运动模型,然后提出一种多机器人的避碰算法,该算法能够使机器人实时检测并避开障碍物(包括其他机器人).结合避碰函数,根据李雅普诺夫法对该非线性系统进行稳定性分析.从仿真效果来看,应用本文所提出的控制策略及方法,移动机器人具有良好的路径跟踪能力,并且能够实时地避开静态和动态障碍物.由于多机器人实时队形控制需要考虑机器人的避障避碰问题,未来拟将本文方法应用到多移动机器人的编队控制及协调合作中.
[1] 山丹.多移动机器人路径规划及避碰研究[D].沈阳:沈阳理工大学,2012.
[2] 游文洋,章政, 黄卫华.基于模糊改进人工势场法的机器人避障方法研究[J].传感器与微系统,2016,35(1):14-18.
[3] 李奕铭.基于人工势场法的移动机器人避障研究[D].合肥:合肥工业大学,2013.
[4] TRILAKSONO B R.Distributed consensus control of robot swarm with obstacle and collision avoidance[C]//International Conference on Information Technology, Computer, and Electrical Engineering.Indonesia,2015:2.
[5] 杨一波,王朝立.基于改进的人工势场法的机器人避障控制及其MATLAB实现[J].上海理工大学学报,2013,35(5):496-500.
[6] 王剑,肖龙.基于遗传模糊控制的多机器人避碰规划[J].工业控制与应用,2009,28(1):24-30.
[7] 段勇,陈腾峰.基于强化学习的多机器人避碰算法研究[J].信息技术,2012,(6):100-103.
[8] JIN J F,KIM Y G,WEE S G,et al.Decentralized cooperative mean approach to collision avoidance for nonholonomic mobile robots[C]//IEEE International Conference on Robotics and Automation.Seattle,2015:35-41.
[9] 欧阳鑫玉,杨曙光.基于势场栅格法的移动机器人避障路径规划[J].控制工程,2014,21(1):134-137.
[10]张永华,苑文法.李雅普诺夫函数的构造及应用[J].榆林学院学报,2011,21(6):21-23.
[11]王东署,段谊海,王佳.未知环境中移动机器人的环境探索与地图构建[J].郑州大学学报( 理学版),2014,46(3):96-101.
[12]MOHAMMADI K,TALEBI H A,ZAREINEJAD M.Lyapunov stability analysis of a bilateral teleoperation system interacting with active environment[C]//RSI International Conference on Robotics and Mechatronics.Tehran,2015:96-101.
[13]王佳,王艳新.基于滑动模型与图论的多机器人跟踪控制[J].计算机仿真,2010,27(10):156-159.
[14]NASCIMENTO T P. Multi-Robot nonlinear model predictive formation control:the obstacle avoidance problem[J].Robotica,2016,34(3):549-567.
(责任编辑:方惠敏)
Research on Obstacle Avoidance and Cooperative Collision Avoidance of Multiple Mobile Robots
DENG Jicai, MENG Sensen, WANG Jia, ZHANG Dawei
(SchoolofInformationEngineering,ZhengzhouUniversity,Zhengzhou450001,China)
By combining the movement control model with collision avoidance function of mobile robot, the controller suitable for each robot was designed by the Lyapunov stability analysis method. The controller achieved the collision avoidance of multiple mobile robots as well as their trajectory tracking. The proposed control approach was verified by simulations.The results demonstrated that the control approach could apply to obstacle avoidance, collision avoidance and trajectory tracking of multiple mobile robots effectively.
mobile robots; Lyapunov stability analysis; obstacle avoidance; cooperative collision avoidance
2016-06-21
国家自然科学基委-民航联合基金(U1433106);2016年度河南省科技攻关计划项目(162102210162).
邓计才(1964—),男,河南郑州人,教授,主要从事竞技机器人研究,E-mail:iejcdeng@zzu.edu.cn;通讯作者:张大伟(1982—),男,河南郑州人,讲师,主要从事多机器人协作研究,E-mail:iedwzhang@zzu.edu.cn.
TP24
A
1671-6841(2017)02-0096-05
10.13705/j.issn.1671-6841.2016170
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
现代仪器与医疗(2021年1期)2021-06-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
电子技术与软件工程(2019年20期)2019-11-30
创新作文(1-2年级)(2019年4期)2019-10-15
计算机测量与控制(2018年9期)2018-09-19
专用汽车(2015年1期)2015-03-01
