基于信号对称性的抑制饱和误差算法
2017-05-11 07:40李娜刘凯王帅军周晋阳
河南科技学院学报(自然科学版) 2017年2期
李娜,刘凯,王帅军,周晋阳
基于信号对称性的抑制饱和误差算法
李娜1,刘凯2,王帅军3,周晋阳1
(1.长治医学院生物医学工程系,山西长治046000;2.四川大学电气信息学院,四川成都610065;3.南方科技大学计算机工程与应用系,广东深圳518055)
为了减小相位测量过程中饱和引起的相位误差,更精确地重建物体的三维形貌,提出一种利用正反信号编码光栅图片降低因饱和引起的相位误差的新算法.算法通过编码正反信号的光栅图片,利用正反信号对应的光栅图片中像素点之间的对称性,修复饱和像素点的强度值,利用修复后的像素点强度值重建物体的三维形貌,从而降低饱和误差.通过仿真软件仿真及实验均证实本文算法的效用.实验结果表明:采用该算法的饱和误差的均方根值相对于传统测量方法减小了77.78%.
三维测量;相位测量轮廓术;相位误差;光强饱和;正反信号编码
相位测量轮廓术(PMP)是主动式的三维测量方法之一[1-2].由于其具有测量快、精确度高等优点,目前被广泛使用在三维建模、生物识别等领域[3-4].但在实际测量中,一些因素会影响相位测量的准确性,如:环境及设备的噪声[5]、系统的Gamma失真[6]、量化[7]以及饱和[8]等.在PMP测量过程中,当测量的物体表面反射率变化较大或者背景光较强时,相机获取的包含被测物体信息的图像中,部分像素点强度值被量化为相机所允许的最大灰度值,即发生强度饱和.针对饱和误差,相关学者进行了大量分析研究.胡而已等[8]分析了像素点的饱和程度,然后对未饱和的像素点排序,根据排序后像素点对应的新相位与原始相位之间的关系,求得饱和像素点对应的相位.姜宏志等[9]提出了改进的投影栅相位算法,将多种图像处理方法融合到传统的PMP中.胡而已等[10]根据像素点的饱和程度,提出六步相移的算法;赵婧等[11]建立像素点强度值的模型,并用此模型求得相位值.本文提出一种正反信号编码光栅图片的修复方法,利用正反光栅图像中像素点的强度值对称性,修复饱和像素点的强度值,降低饱和误差.
1 饱和误差分析
理想环境中,相机能获取像素点对应的真实强度.但是在实际测量过程中,由于部分像素点发生强度饱和,使得相机获取的该部分强度值不准确,两者之间的关系用式(1)表示[12]



分析式(3)可知,由于饱和产生的误差不仅与相机获取的图像强度值有关,而且与投影仪投射到被测物体表面的图片数量N有关.
2 正反信号编码光栅图片降低饱和误差算法
正反信号编码的光栅图片可以表示为


为了获取两组图像的对称图像,在扫描被测物体的同时,投射纯黑色以及纯白光栅图片,照相机同步获取的黑色以及白色图像表示为、,那么

假设照相机获取的正信号图像中某一像素点发生饱和,根据正反信号对称性修复该饱和像素点的强度值,关系如下

表示修复(xc, yc)像素点的强度值后得到的新值;是照相机获取的反信号编码光栅图像中(xc, yc)的强度值;Is是对称纯色图像中(xc, yc)的强度值.
3 算法仿真及分析
本文使用如图1所示的三维半球体进行模拟仿真.该半球体的半径是100 mm,底部面的反射率设置为0.5,随着球面高度的增加,反光率也逐渐增加,球体顶部的反光率为1.

图1 模拟的三维半球体Fig.1 Simulated hemisphere
模拟投影仪投射正反信号编码的正弦光栅图片到该半球体表面,每组图片的数量N=4,频率f=1.数值模拟相机的量化上限值为255,若包含半球信息的图像强度值超出该上限值,则认为该像素点发生饱和.图2是模拟照相机获取的包含物体信息的一帧图像,从图像观察可知在半球底部局部发生了饱和.

图2 模拟照相机获取的一帧图像Fig.2 Simulated pattern ofacquired by the camera
分别采用PMP、文献[10]的方法以及本文的修复方法计算模拟投射三维半球的相位以及相位误差.图3是该半球体第150列像素点对应的相位误差.实线是采用传统的相位测量轮廓术计算得到的半球体150列像素点对应的相位误差;点划线是采用文献[10]的方法修复的饱和误差;虚线是采用本文的方法修复的饱和误差.从图中比较可知:采用本文方法能有效抑制饱和误差.
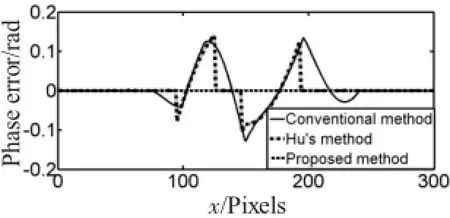
图3 第150列像素点的相位误差Fig.3 Phase error atthe 150th column
模拟投射频率为1 Hz时,采用传统的测量轮廓术方法、文献[10]的方法以及本文提出的方法分别计算相位误差的均方根(RMS)值为0.019 6、0.010 8、4.244 5 E-17.通过比较可知:本文提出的算法基本上可以消去该误差.
4 实验验证及结果分析
为了验证本文算法的实际有效性,采用白色墙面作为实验对象.实验环境为一台普通计算机(CPU:Core i3-4170,RAM:4GB,系统类型:64位操作系统)、CASIO XJ-A155V投影仪以及Prosilica GC640M照相机.投影仪的分辨率为640×480,量化等级8 bit;照相机的分辨率为800×600,最大量化等级8 bit.投射正反信号编码正弦光栅图片,其频率分别为1和4.图4-a是照相机获取的正信号对应的一帧光栅图像,频率为4;图4-b是该帧图像第320列像素点的强度值.从图中可知:第320列像素点所在的正弦曲线波峰位置变化平缓,该区域像素点发生饱和,从而导致照相机获取的光栅图像失真.
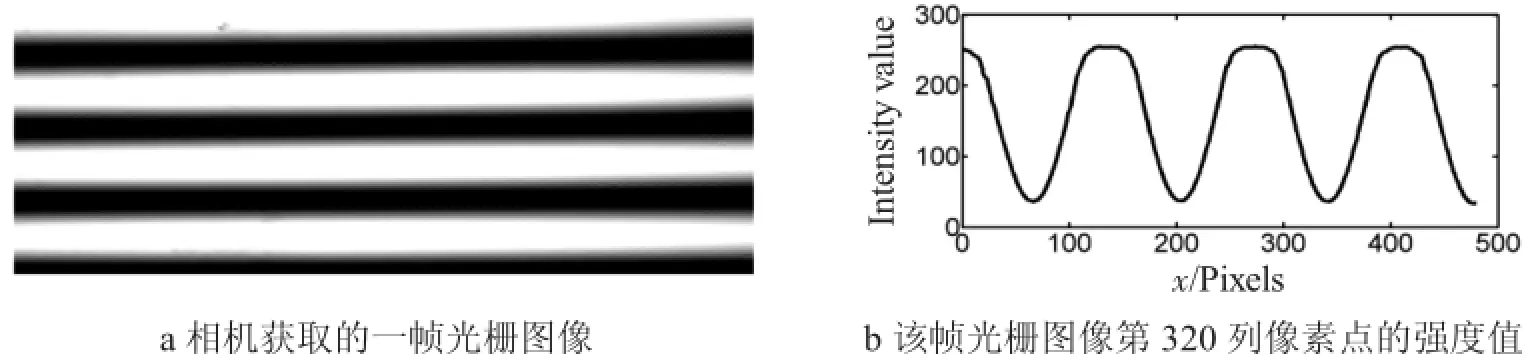
图4相机获取的一帧失真图像Fig.4 The distorted image ofacquired by camera
图5 是采用文中提出的算法修复第320列像素点的强度值.实线是相机直接获取的第320列像素点的强度值,虚线是算法修复后得到的强度值.从图中比较可知:算法能较好地修复饱和像素点的强度值,使其接近真实值,抑制饱和误差.
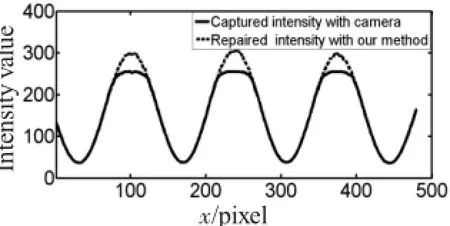
图5第320列像素点的强度值Fig.5 Intensity value atthe 320th column
图6 是被测墙面的三维重建效果图.

图6 墙面的三维重建Fig.6 Frontview and side viewof3D reconstruction ofwall
图6-a是采用传统的测量轮廓术得到的墙面重建前视图和侧视图;图6-b是采用文中提出的方法修复后得到的墙面重建前视图和侧视图.图中颜色的变化表示墙面凹凸的程度,从图中分析可知:存在饱和像素点时,重建得到的墙面凹凸变化比较明显,产生失真;采用文中的算法修复后,重建得到的墙面表面平滑,无大的起伏波动.
图7是第350列像素点对应的相位误差.实线是采用传统的相位测量轮廓术计算得到的相位误差,虚线是采用文中提出的算法计算得到的相位误差.从图中比较可知:采用文中提出的算法修复后饱和误差明显减小.
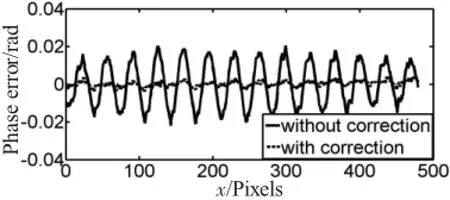
图7 第350列像素点的相位误差Fig.7 Intensity value atthe 350th column
采用传统的测量轮廓术和文中提出的算法分别计算相位误差均方根(RMS)值分别为0.009和0.002,修复之后误差减小了77.78%.
5 小结
本文分析了PMP中饱和引起的相位误差,利用正反信号编码光栅图片的对称性,修复饱和像素点的强度值,并重构物体的三维形貌.但是,当实际测量系统中存在非线性失真时,文中的算法无法有效修复该误差.对于该问题,后续将进一步进行分析研究.
[1]YALLAVG,HASSEBROOKLG.Very high resolution 3Dsurface scanning using multi-frequency phase measuring profilometry[J]. Proceedings ofSPIE-The InternationalSociety for Optical Engineering,2005,5798:44-53.
[2]SRINIVASAN V,LIU H C,HALIOUA M.Automated phase-measuring profilometry of 3-D diffuse objects[J].Applied Optics, 1984,23(18):3105-3108.
[3]SALVI J,PAGES J,BATLLE J.Pattern codification strategies in structured light systems[J].Pattern Recognition,2004,37(4):827-849.
[4]HAJEER MY,MILLETT D T,AYOUB A F,et al.Currentproducts and practices applications of3Dimaging in orthodontics:Part II[J].Journalof Orthodontics,2004,31(2):154-162.
[5]WANG Y,LIU K,HAO Q,et al.Robust active stereo vision using kullback-leibler divergence[J].IEEE Transactions on Pattern Analysis&Machine Intelligence,2012,34(3):548-563.
[6]LIUK,WANGS,LAU D L,et al.Nonlinearity calibrating algorithm for structured lightillumination[J].Optical Engineering,2014,53(5):688-696.
[7]SKYDAN OA,LILLEY F,LALOR MJ,et al.Quantization error of CCD cameras and their influence on phase calculation in fringe pattern analysis[J].Applied Optics,2003,42(26):5302-5307.
[8]胡而已,何玉明,陈炎明.投影栅相移法中的相位波动误差及修正算法研究[J].实验力学,2008,22(4):345-352.
[9]姜宏志,赵慧洁,李旭东,等.用于强反射表面形貌测量的投影栅相位法[J].光学精密工程,2010,18(9):2002-2008.
[10]胡而已,李艳.投影条纹相移法中图像饱和误差抑制算法研究[J].光子学报,2010,39(6):1137-1142.
[11]赵婧,王永昌,刘凯.一种抑制相位测量轮廓术饱和误差的方法[J].中国激光,2013(10):180-187.
[12]李娜,郑晓军,吴炜,等.抑制相位测量轮廓术饱和误差相位融合算法[J].强激光与粒子束,2014,26(12):80-84.
(责任编辑:卢奇)
A suppression algorithm for the saturation error based on the symmetry of signals in phase measuring profilometry
LINa1,LIU Kai2,WANG Shuaijun3,ZHOU Jinyang1
(1.Changzhi MedicalCollege DepartmentofBiomedicalEngineering,Changzhi046000,China;2.SchoolofElectricalEngineering and Information Technology,Sichuan University,Chengdu 610065, China;3.Southern University of Science and Technology Department of Computer Science and Engineering,Shenzhen 518055,China)
In order to reduce the phase error caused by saturation in phase measuring profilometry(PMP),a new algorithm that encoding the pattern with positive and negative signal was proposed in this paper.Firstly,encoding the pattern with positive and negative signal;secondly,repair intensity of saturated pixels with symmetry of patterns;lastly,to reconstruct object with repaired intensity.The proposed method can effectively reduce phase error,and the root mean square(RMS)values decrease 77.78%in experiment.
three-dimensional measurement;phase measuring profilometry;phase error;saturation;encoding patterns with positive and negative signal
TP391.9
A
1008-7516(2017)02-0069-05
10.3969/j.issn.1008-7516.2017.02.015
2017-02-17
国家自然科学基金(61473198)
李娜(1989―),女,山西长治人,硕士,助教.主要从事计算机应用与图像处理研究.
周晋阳(1958―),男,山西长治人,教授.主要从事生物医学工程研究.
猜你喜欢
大学物理(2022年7期)2022-07-26
现代电子技术(2021年1期)2021-01-17
电子制作(2019年24期)2019-02-23
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
北方交通(2016年12期)2017-01-15
中国化肥信息(2016年33期)2016-05-17
湖南大学学报·自然科学版(2014年3期)2014-12-30
振动、测试与诊断(2014年6期)2014-03-01