
双机协同无源定位的飞行试验方法研究
2017-05-12 02:02侯玉宏
导航定位与授时 2017年3期
孟 超,侯玉宏,肖 妮
(中国飞行试验研究院,西安 710089)
双机协同无源定位的飞行试验方法研究
孟 超,侯玉宏,肖 妮
(中国飞行试验研究院,西安 710089)
分析了基于测向交叉定位的双机协同无源定位原理,构建了误差模型,给出了影响定位误差的因素。并从双机定位基线、目标机进入距离和目标机进入方位三个因素进行了双机协同无源定位误差的仿真。通过基于定位精度要求的试飞剖面设计,给出了两种典型的双机协同无源定位试飞航线,并给出试飞结果评估的方法和流程。
双机协同;几何精度因子;飞行试验
0 引言
现代空战中,常常不只是单机对单机的格斗,而是机群与机群之间的对抗。协同空战是随着现代战斗机、机载电子系统、机载武器和航空系统的发展而出现的,它是指两架或两架以上战斗机相互配合、相互协作、遂行空中战斗任务的全新空战样式,并将成为未来机群作战的基本样式。其中双机配合作战就是协同空战的一种主要形式,而双机配合无源探测又是执行作战任务的首要阶段,可以为后续的目标分配和战术规划提供重要的目标方位和距离信息。
双机协同无源探测是基于交叉定位原理的,其对目标的定位误差与目标相对于编队飞机的几何布局密切相关,在其他因素不变的情况下,不同组网态势得到的定位精度是不同的,因此研究定位误差与组网态势的关系对于有效地试飞和评估这种协同定位能力是十分必要的。
1 双机协同无源定位原理分析及误差模型构建
1.1 基于测向交叉定位的双机协同无源定位原理分析
双机协同无源定位的原理是基于测向交叉定位,利用两载机通过电子侦察(ESM)得到的目标相对于载机自身的测向线在空间相交,从而确定目标的位置。在二维平面上,取X轴的正方向为载机1到载机2的方向,载机1的坐标为(x1,y1),载机2的坐标为(x2,y2),目标辐射源的坐标为(xT,yT)。如果两载机测得的来波到达方向角分别为θ1、θ2,2条方向射线就可以交于一点,该点即为目标的位置估计。双机测向交叉定位原理如图1所示。

图1 测向交叉定位原理图Fig.1 Principle of direction-finding cross localization
根据图1中的几何关系可得:
(1)
将其写成矩阵的形式为
AX=Z
(2)

由式(2)可以得到目标辐射源位置的解析解为
X=A-1Z
(3)
将这个矩阵展开,可以得到辐射源的位置估计:
(4)
根据双机交叉定向的原理,由式(4)可知,在测得了两载机的来波到达角后,还需要知道两载机的位置信息,这样建立一个统一的坐标系,然后根据式(4)的结果就可以计算出目标辐射源在此坐标系中的位置。但是当载机位置发生变化以后,还需要重新建立坐标系再进行计算。因此,双机之间位置信息的共享是实现协同定位的基础。
1.2 双机协同无源定位误差模型构建
由于实际测量过程中得到的角度θ1和θ2必然存在误差,假定分别具有测角误差δθ1和δθ2,这样两载机测向的交汇点会在一个不确定的模糊区域,如图2所示。
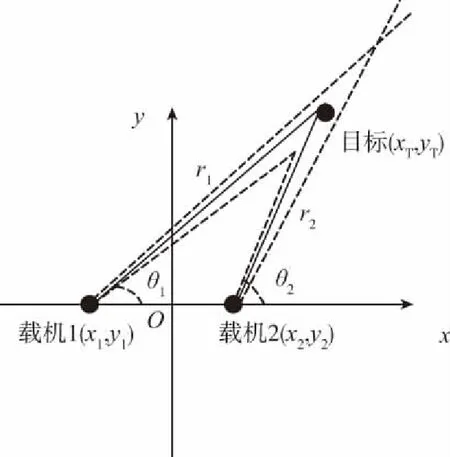
图2 双机测向交叉定位误差示意图Fig.2 Error of dual plane direction-finding cross localization
根据统计分析测向误差服从均值为0的高斯分布,且两机之间的测向误差相互独立,一般的双机协同中采用的是同型机编队,那么两载机的测向精度完全相同,令σθ1=σθ2=σθ。双机交叉定位误差可表示为式(5)。
(5)
式中,r1和r2分别为目标机到两载机间的距离。如图2所建立的坐标系,两载机的位置分别位于(-L,0)和(L,0)处,根据正弦定理,可以得到:
(6)
将式(6)代入式(5)中可以得到
(7)
由式(7)就可以得到,定位误差除了与测向误差有关外,定位基线和三角形的形状对定位误差起到放大的作用。几何精度因子就是由几何位置关系决定的,对定位误差起放大作用的因子,在这里可以定义为
(8)
在试飞中,一般采用相对定位误差来衡量无源定位系统的定位精度,因此在本文中,采用相对定位误差的几何精度因子,即几何精度因子与目标距离的比值,如式(9)。
(9)
2 几何精度因子仿真
依据双机协同无源定位原理和误差模型,相对定位误差的几何精度因子由定位基线(L)、目标距离(R)、目标方位(θ1、θ2)三个因素决定。为了设计合理的试飞态势,必须了解三个因素对几何精度因子的影响程度,但各因素之间不是相互独立的,存在复杂的相关性,因此不适合采用解析的方法进行分析,本文通过计算机仿真的方式,从三个方面重点分析。
2.1 定位基线对几何精度因子的影响仿真
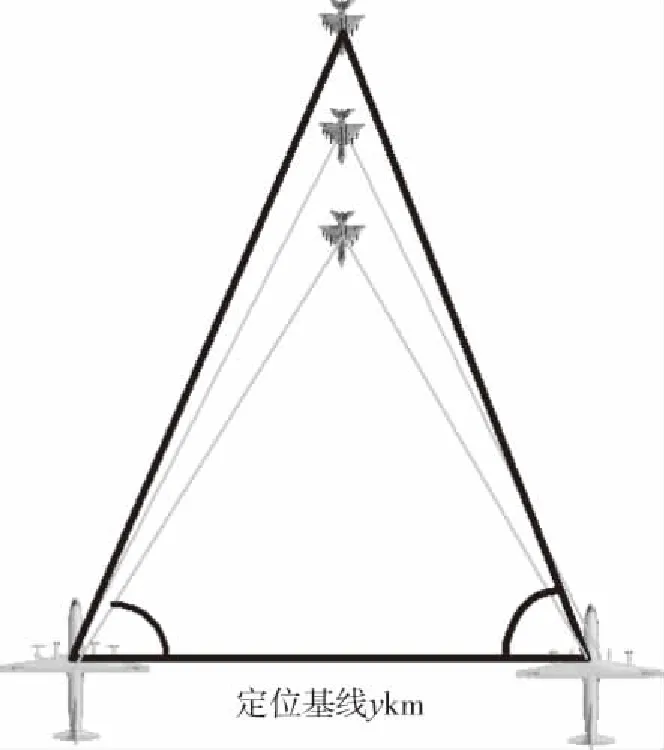
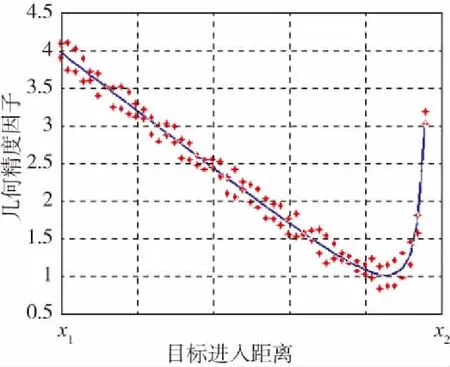
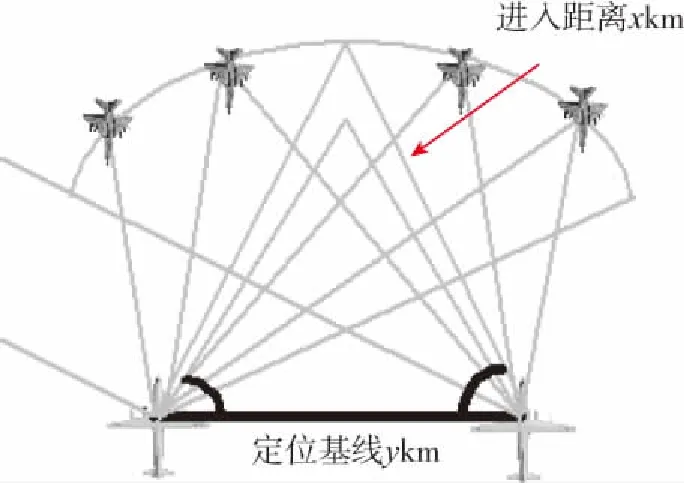
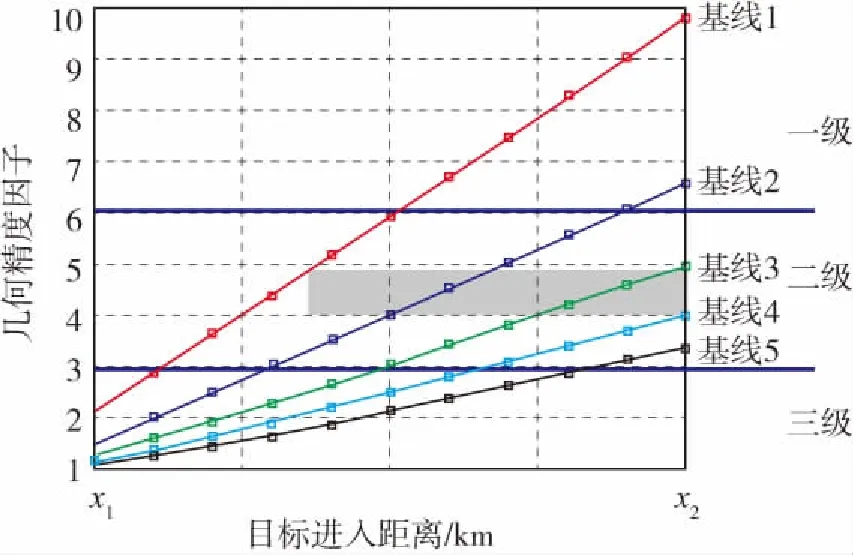
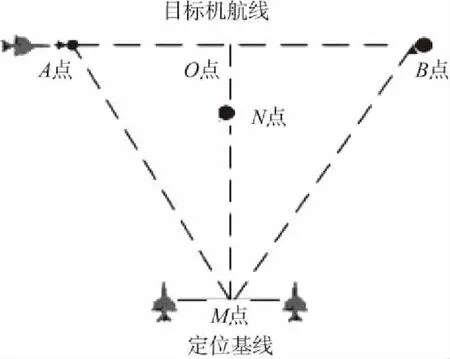
进行定位基线对几何精度因子的影响仿真时,设定的态势如图3所示,目标机位于双机编队的中垂线上,距离固定为xkm,定位基线从y1km~y2km(y1 图3 定位基线仿真示意图Fig.3 Simulation of baseline in dual location 图4 几何精度因子与定位基线的关系(y1 图5 目标进入距离仿真示意图Fig.5 Simulation of the distance of target plane getting into 2.2 目标机进入距离对几何精度因子的影响仿真 图6 几何精度因子与目标机进入距离的关系(x1>x2)Fig.6 Relation between GDOP and the distance of target plane getting into 进行目标机进入距离对几何精度因子的影响仿真时,设定的态势如图5所示,定位基线为ykm固定不变,目标机位于双机编队的中垂线上,目标机距离由远及近,从x1km~x2km(x1>x2)变化,步长10km。仿真结果如图6所示。从仿真结果可以看出,随着目标机距离的减小,几何精度因子直线改善,当目标机距离小于定位基线后,几何精度因子稍有变坏,会导致定位误差变大。 2.3 目标机进入方位对几何精度因子的影响仿真 进行目标机进入方位对几何精度因子的影响仿真时,设定的态势如图7所示,定位基线为ykm固定不变,目标机距离为xkm固定不变,目标机的进入方位从-60°~60°变化,步长5°。仿真结果如图8所示,从仿真结果可以看出,几何精度因子与目标机进入方位呈抛物线关系,目标机迎头进入几何精度因子最佳,偏离越大几何精度因子越差,20°以内较稳定,大于20°以后恶化剧烈。 图7 目标机进入方位仿真示意图Fig.7 Simulation of the azimuth of target plane getting into 图8 几何精度因子与目标进入方位的关系Fig.8 Relation between GDOP and the azimuth of target plane 经过上述分析和仿真,定位基线、目标距离和目标方位对几何精度因子的影响基本明晰,可用于指导试飞方案规划,设计合理的试飞剖面。 3.1 试飞剖面设计 根据定位精度要求,对应不同的几何精度因子等级,分别是一级(GDOP>6)、二级(3 态势一:假定目标机正迎头进入,就可以构建定位基线和目标机进入距离的态势图,不同的目标机进入距离和我机编队基线就构成了不同级别定位等级,如图9所示。图9中,基线1<基线2<…<基线5,目标机进入距离x1 图9 定位等级态势图(距离-基线)Fig.9 State map of location level(distance-baseline) 态势二:假设我机编队基线不变,目标机从旁站进入,构建目标机进入距离和进入方位的态势图,如图10所示,不同的目标机进入距离和进入方位就构成了不同级别的定位等级。 图10 定位等级态势图(距离-方位)Fig.10 State map of location level(distance-azimuth) 基于态势一设计试飞剖面,假定几何精度因子要求为4~5,如图9中的红色区域。根据目标机进入距离,以及图9中给出的定位等级态势图,实时调整我机编队的定位基线,即可将定位精度控制在任务要求的范围内。双机协同定位“距离-基线”典型试飞航线如图11所示,目标机从xkm进入,双机ykm编队,随着目标机距离的接近,双机编队基线逐渐减小。 图11 “距离-基线”典型试飞剖面Fig.11 Typical flight-test profile of distance-baseline 基于态势二设计试飞剖面,假定几何精度因子要求为4~5,根据目标机进入方位,寻找满足定位精度要求的区域,目标机距离xkm旁站进入,双机ykm编队,目标机由A点向O点飞行,双机编队由M点向N点飞行,双机编队的速度和目标机速度保持基本同步,可实现有效定位。目标机由O点飞至B点的过程中,双机编队由N处返回至M点。而后,目标机从B点飞至O点,双机由M点处再次进入。 图12 “距离-方位”典型试飞剖面Fig.12 Typical flight-test profile of distance-azimuth 3.2 试飞数据处理 尽管在试飞剖面设计时,充分考虑了几何精度因子,但在实际的飞行过程中,目标机和我方编队飞机的位置关系动态变化。由于编队飞机速度不匹配、位置误差等因素,导致实际飞行轨迹与设计的试飞剖面存在偏差,因此需要对其几何精度因子进行再次评估,按照不同的几何精度因子对数据进行分组,考核其定位精度。 在双机协同无源定位试飞时,需要记录以下数据: 1)编队飞机和目标机的经纬度信息; 2)单机输出的探测结果(目标机方位); 3)双机协同后输出的目标机距离和方位。 试飞数据处理流程如图13所示。 图13 无源定位精度评估流程Fig.13 The flow chart of evaluating passive location precision accuracy 双机协同无源定位的精度与双机的编队态势以及目标机进入的方位和距离有着密不可分的关系,基于几何精度因子对其进行详细的分析,对于试飞剖面的设计以及试飞结果的评判都将起到重要的作用。关于试飞剖面的设计,本文仅给出了一种思路和两种典型剖面,基于几何精度因子理论,还可以设计更多的试飞剖面。在后续的研究中,关于双机协同无源定位的试飞结果评估,也应基于几何精度因子理论进行误差分离,对设备本身的误差和几何关系引起的误差分别进行评估。 [1] 孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996. [2] 胡来招.无源定位[M].北京:国防工业出版社,2004. [3]XiuJJ,HeY.Constellationofmultisensorsinbearing-onlylocationsystem[J].IEEProceedings-RadarSonarandNavigation, 2005, 152(3):215-218. [4] 赵星辰,吴军,彭芳,等.联合空战中一种基于双机配合的无源定位方法研究[J].传感器与微系统,2012,31(6):18-21. [5] 王伯生,王芳.空基平台无源定位的误差推导与精度分析[J].航空计算技术,2012,42(3):89-91. [6] 朱剑辉,方洋旺,张平,等.双机协同定位误差分析的研究[J].电光与控制,2012,19(6):21-25. [7]LevanonN.LowestGDOPin2-Dscenarios[J].IEEProceedings-RadarSonarandNavigation, 2000, 147(3):149-155. [8] 王本才,张国毅,侯慧群.无源定位技术研究[J].舰船电子对抗,2006,29(6):20-26. [9]HOKC,XUW.AnaccuratealgebraicsolutionformovingsourcelocationusingTDOAandFDOAmeasurements[C].IEEETransactiononSignalProcessing,2004,52(9):2453-2463. [10]ChercharA,BelouchraniA,ChonavelT.Anewapproachtomaneuvringtargettrackinginpassivemultisensorenvironment[R].Passive, 2010. [11] 吴世文.机载无源定位系统的定位精度[J].电子信息对抗技术,1995(1):27-31. [12] 王建钢,朱元清,毛五星.机载无源定位系统的多点定位及精度分析[J].空军雷达学院学报,2003,17(3):28-30. [13] 王喜鹏,王飞.机载无源定位精度分析[J].舰船电子对抗,2012,35(3):23-26. [14] 王本才,何友,王国宏,等.双站无源均值定位算法精度分析[J].四川兵工学报,2010,31(4):78-81. Research on Flight Test Method of Dual Plane Cooperative Passive Localization MENG Chao, HOU Yu-hong, XIAO Ni (Chinese Flight Test Establishment,Xi’an 710089,China) By analyzing the principle of dual plane cooperative passive location based on direction-finding cross localization, the error model is established, and factors affecting the position error are introduced.Computer simulation on the error of double collaborative passive location from three factors is conducted,including baseline in dual plane location, the distance and the azimuth of target plane.Through designing the flight profile based on positioning accuracy requirements, two typical flight routes of dual cooperative passive location are proposed, and the methods of evaluation and processing on test results are given. Double plane cooperative;Geometric precision factor;Flight test 10.19306/j.cnki.2095-8110.2017.03.008 2016-08-23; 2016-11-21 孟超(1984-),男,工程师,主要从事机载电子设备试飞方面的研究。E-mail:chaozi_meng@126.com V217 A 2095-8110(2017)03-0046-06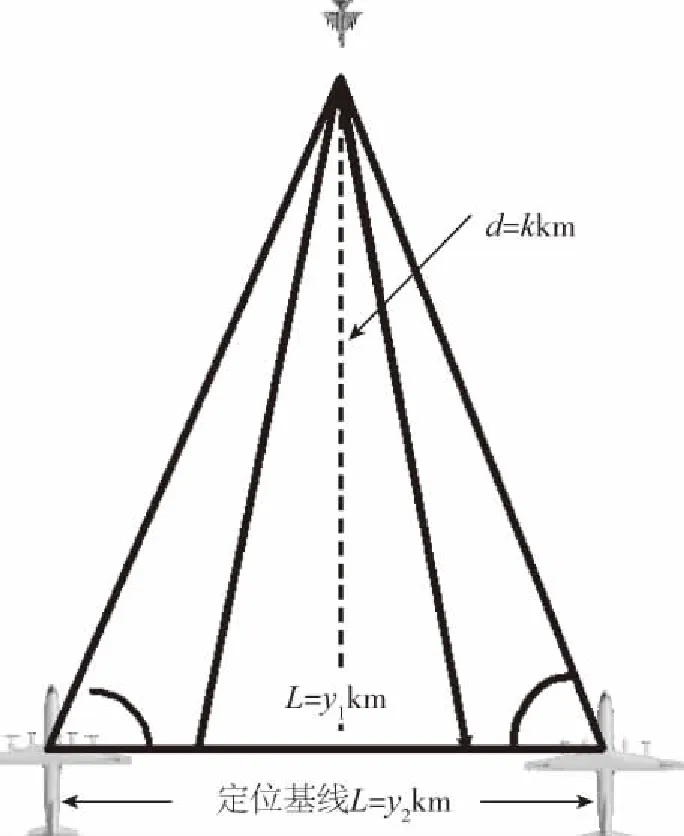


3 基于几何精度因子的试飞方案设计



4 结束语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15导弹与航天运载技术(2022年2期)2022-05-09导航定位学报(2021年5期)2021-10-13船舶标准化工程师(2019年4期)2019-07-24电子制作(2019年12期)2019-07-16舰船电子对抗(2019年6期)2019-04-27北京航空航天大学学报(2017年6期)2017-11-23舰船电子对抗(2016年5期)2016-12-13互联网天地(2016年2期)2016-05-04中国科技术语(2012年5期)2012-12-28
