
基于DSP的一体化交流伺服系统研究和实现
2017-05-12 02:02李福瑞胡琪波李杨声汪东政
导航定位与授时 2017年3期
李福瑞,胡琪波,李杨声,刘 佳,汪东政
(湖北三江航天红峰控制有限公司,湖北 孝感 432000)
基于DSP的一体化交流伺服系统研究和实现
李福瑞,胡琪波,李杨声,刘 佳,汪东政
(湖北三江航天红峰控制有限公司,湖北 孝感 432000)
针对当前伺服系统采用的角度传感器进行AD采样和换算后得到电机速度,无法很好满足速度实时性要求.同时位置反馈元件线性度低、反馈信号易受干扰,因此导致伺服系统稳定性很难保证。结合目前伺服系统存在速度闭环差、结构转换效率低、抗干扰能力弱等问题,提出一种伺服电机与减速机构、旋转变压器一体化设计的方案。通过试验证明,该伺服系统具有控制精度高(最高可达16bit精度)、抗干扰能力强等特点,符合未来电动伺服系统发展的研究方向。
伺服系统;抗干扰;高精度
0 引言
随着各学科专业技术的进步与发展,国内外在高性能伺服电机技术、各种减速传动机构及伺服控制和驱动技术等方面的研究和应用已经较为成熟,同时各种先进的电机、机械、控制、电气等方面的设计和仿真软件也在相关技术开发过程中起到越来越重要的作用,特别是集成各学科的综合研发平台也正在航空航天、国防等领域得到深入的研究和应用。因此,在基于各专业技术不断发展的基础上,各种新型一体化伺服控制系统的开发得以更好的实现,并得到了更好的发展。
随着社会生产力的不断发展和科学技术水平的不断提高,伺服系统逐步向长寿命、高效率、免维护、机电一体化设计方向发展,应用领域不断拓展,使交流永磁无刷伺服系统成为主要发展趋势,其优点如下:
1)电机:交流伺服技术和稀土永磁电机制造技术的高速发展,使得伺服技术进入了交流化时代,各种类型的交流伺服系统相继被开发出来,促进了交流伺服系统的应用。同时,先进的控制理论和控制算法及高度集成化的模块为交流电机的进一步发展开拓了交流伺服系统广阔的发展前景。交流电机与直流电机相比具有以下优点:一是可靠性高;二是环境适应性强;三是功率体积比高。
2)减速机构:谐波传动、滚珠丝杠副等减速器的广泛应用,使伺服系统的实现具有更大的灵活性。由于滚珠丝杠副具有效率高、承载能力强、刚度高、使用寿命长等特点,其在大减速比、大载荷环境和高刚度要求条件下得到了更为广泛的应用。
3)伺服系统总体设计技术:以整体的概念组织应用各种相关技术,从全局角度和系统目标出发,将总体分解成相互有机联系的若干功能单元,找出能完成各个功能的技术方案,再将各个功能与技术方案组合成方案组进行分析、评价、优选的综合应用技术,它包括机电一体化机械的优化设计、CAD/CAM等技术,机电一体化也将成为伺服系统的一个重要发展方向。
综上所述,可以看出伺服控制系统的发展可以归纳为三个方面:性能上,向高精度、高效率、高可靠性、高适应性方向发展;功能上,向小型化、轻型化、一体化、多功能等方向发展;控制方式上,实现全数字化、智能化、综合化是伺服系统发展的总趋势。
1 工作原理
一体化交流伺服控制系统采用交流同步电机直接驱动滚珠丝杠副传动装置,利用旋转变压器反馈位置信号的实现方案,系统构成如图1所示。

图1 一体化交流伺服控制系统框图Fig.1 Integrated system of AC servo control block figure
一体化交流伺服控制系统工作原理:系统根据设定的控制规律,通过给定的位置信号和伺服机构反馈信号比较后形成位置环,产生位置偏差信号,与无接触旋转变压器输出的速度信号综合后形成速度环,得到速度偏差信号,和电机电枢电流综合形成电流环,得到电流偏差信号,产生控制功率管开关信号,通过驱动放大电路后驱动交流同步电机旋转,直接带动滚珠丝杠副转动,利用滚珠丝杠副运动转化的多样性,将电机的回转运动转化为丝杠的直线运动,输出直线位移,同时通过计算旋转变压器数字量得到伺服机构的位置信号,最终实现三闭环控制系统。
2 软硬件设计
2.1 伺服机构设计
一体化交流伺服控制系统的机构设计主要在于有效地将传统伺服机构的电机、传动机构和传感器等部件进行集成,使伺服机构的结构更加紧凑。在该伺服控制系统中通过采用交流同步电机直接驱动滚珠丝杠副传动装置的实现方案,将滚珠丝杠副和传感器集成到交流电机内部,从而达到一体化设计的目的。
一体化交流伺服机构主要由电机本体、滚珠丝杠副、位置反馈元件等组成,其中滚珠丝杆副与电机转子通过定位销同轴安装,旋转变压器安装于电机尾端,反馈转子位置信号。与传统伺服机构相比,在输出功率一定的情况下,有效地将传统伺服机构的电机、传动机构和传感器等部件进行集成,使伺服机构结构更加紧凑,采用该设计思路大大减少了机构的体积,同时一体化伺服机构设计采用滚珠丝杠与电机一体化设计,实现电机输出转速及力矩对舵面进行直接输出控制,避免了减速机构带来的能量损失及传动间隙对控制系统造成的影响,因此采用丝杠直驱方式能够提高整个伺服机构的刚度。
一体化交流伺服控制系统的伺服机构主要由电机和传动机构两大部分组成。其中电机采用交流同步电机实现,传动机构采用滚珠丝杠副作为传动部件,如图2所示。

图2 一体化伺服机构结构图Fig.2 The mechanism of integrated servo structure figure
2.2 驱动器设计
功率放大器主要由伺服控制和伺服驱动两部分功能模块组成。其中,伺服控制部分由数字信号处理(DSP)电路+CPLD、A/D转换电路、旋转变压器信号调理电路、总线接口电路、二次电源电路等组成;伺服驱动部分由隔离驱动电路、三相功率桥放大电路、电流采样电路和保护电路等组成。该部分设计关键在于AD2S1210解码控制时序的实现方案。
AD2S1210是一款旋变数字转换芯片,可以由软件灵活配置数据输出分辨率、激励信号振荡频率、数据读取方式(串口或并口)、速度和角度读取选取等,本文采用CPLD对AD2S1210进行软件配置, CPLD控制AD2S1210实现了交流同步电机转子旋转位置和速度信息的切换和读取,为电机控制提供了高精度的位置和速度反馈数据。 CPLD控制AD2S1210读取转子位置和速度信息流程如图 3所示。

图3 CPLD控制AD2S1210读取转子位置和速度信息流程图Fig.3 Read rotor position and speed information by CPLD control AD2S1210 flow chart
2.3 软件设计
控制软件主要功能为完成数据、变量和中断的初始化,然后进入循环程序。该程序根据读取的转子磁场位置、相电流及速度信号,生成SVPWM控制信号。软件控制流程如图4所示。

图4 SVPWM控制流程图Fig.4 SVPWM control flow diagram
3 SVPWM算法设计与仿真
其SVPWM控制策略技术难点主要在于扇区号确定、电角度以及开关时间计算。首先通过确定Uref所在的区间,通过相关运算得到扇区号。6个基本电压空间矢量组成6个扇区,确定参考电压空间矢量所在的区间才能知道用哪2个相邻基本电压空间矢量合成Uref,如图5所示。

图5 电压空间矢量的线性组合Fig.5 A linear combination of the voltage space vector
将基于定子绕组的三相坐标系(ABC)转换成直角坐标系(αβ坐标系),坐标变换矩阵为
(1)
先用式(2)计算出辅助变量B0,B1,B2:
(2)
再用式(3)计算S值
S=4sign(B2)+2sign(B1)+sign(B0)
(3)
式中,sign(x)为符号函数,当x>0时,sign(x)=1;如果x≤0,sign(x)=0,然后根据S值查表1可确定扇区号。

表1 S值与扇区对应关系Tab.1 The relationship between S_value and the sector
由图5得知
(4)
再根据正弦定理:
(5)
(6)
由式(5)和式(6)解得:
(7)
(8)

当逆变电路单独输出零矢量0000和0111时,电动机的定子磁链矢量是不动的,根据这个特点,在T期间插入零矢量作用时间t0, 从而达到调整角频率ω,以达到变频的目的。根据零矢量的分割方法可以产生多种SVPWM波形,目前最常用的是七段式SVPWM方法。
T=t0+t1+t2
Txon是根据电压矢量所在的扇区来确定的,由以上内容可以得出各扇区开关切换时间如表2所示。

表2 开关切换时间表Tab.2 Switching schedule
根据以上设计分析,SVPWM控制框图如图6所示,该程序根据读取的转子磁场位置、相电流及速度信号,生成SVPWM控制信号。

图6 SVPWM控制框图Fig.6 SVPWM control block diagram
在控制信号幅值为2°条件下对系统进行阶跃响应仿真,结果如图7所示,从仿真结果可以看出,系统的调整时间约为45ms,超调量约为3.5%。

图7 2°阶跃信号响应曲线Fig.7 2°step response graph
4 试验验证情况
主要对该伺服系统进行的测试项目如下:
1)时域特性测试;
2)频率特性测试;
3)死区测试。
4.1 时域特性测试
额定负载力矩条件下,给伺服机构施加幅值为1°的阶跃信号,进行时域特性测试,其测试结果如图8所示。
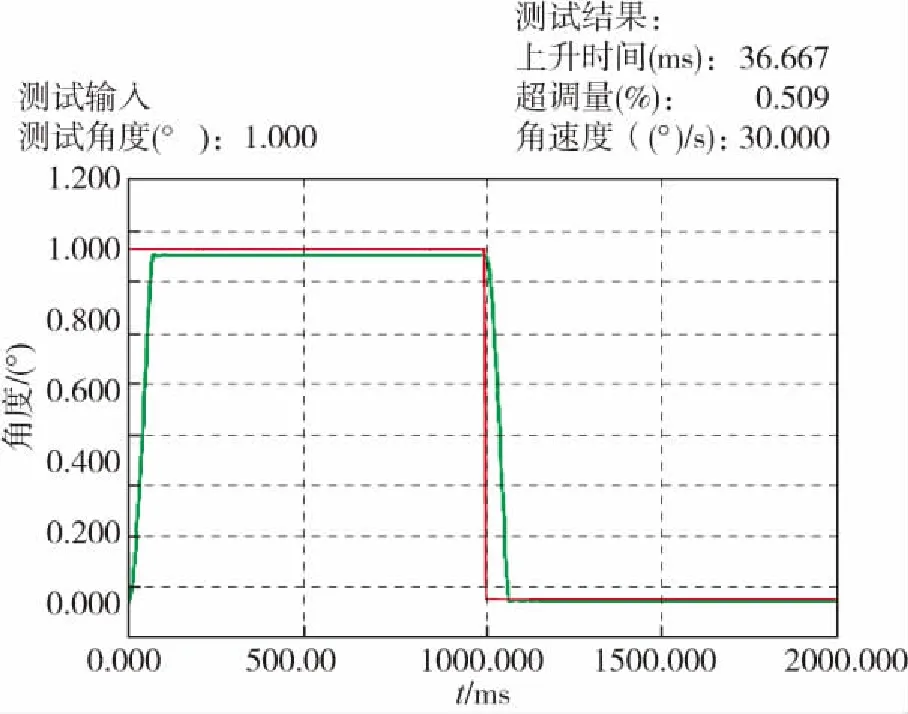
图8 1°阶跃信号响应曲线Fig.8 1°step response graph
4.2 频率特性测试
最大负载力矩条件下,给系统施加幅值为0.8°、不同频率的正弦激励信号,伺服系统频率单点测试波形见图9~图12所示。

图9 1Hz频率特性测试Fig.9 1Hz frequency characteristic

图11 3Hz频率特性测试Fig.11 3Hz frequency characteristic

图12 4Hz频率特性测试Fig.12 4Hz frequency characteristic
4.3 死区测试
为了测试产品的死区,给伺服机构施加阶跃信号幅值为0.02°,其响应曲线如图13所示。

图13 死区响应曲线Fig.13 Dead zone response graph
4.4 验证小结
通过对一体化交流伺服系统分别施加以上三种信号进行测试,测试结果表明,该系统具有良好的跟随能力、控制精度及抗干扰能力。
5 结论
通过以上分析和论述,解决软硬件设计中存在的难点问题,完成了一体化交流伺服系统设计方案,并对该方案进行了试验验证,证明该伺服系统具有较好的跟随能力、抗干扰能力且精度高。同时该方案设计的伺服系统具有传动效率高、低速控制性能好等特点,因此,全数字化伺服系统将成为未来伺服系统发展的一个重要方向。
[1] 袁登科,陶生桂.交流永磁电机变频调速系统[M].北京:机械工业出版社,2011.
[2] 寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[3] 陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.
[4] 强勇,凌有铸,贾冕茜. 基于RBF神经网络的永磁同步电机速度控制[J]. 微电机,2013,46(4):863-870.
[5] 周宜然,甘屹,陶益民,等. 基于改进遗传算法的伺服系统自抗扰控制研究[J]. 机械工程与自动化,2015(1):159-161.
[6] 左月飞,张捷,刘闯,等. 基于自抗扰控制的永磁同步电机位置伺服系统一体化设计[J]. 电工技术学报, 2016, 31(11):51-58.
[7] 曾轩,刘超,盛鑫军,等. 驱控一体伺服系统的FPGA模块设计与应用[J]. 机电一体化, 2016(4):60-64.
[8] 李洪文,邓永停,王建立. 永磁同步电机速度控制器的全数字化集成[J]. 光学精密工程,2015, 23(4):1105-1113.
[9] Li S H,Liu Z G.Adaptive speed control for permanent magnet synchronous motor system with variations of load inertia[J]. IEEE Transactions on Industrial Electronics, 2009,56(8):3050-3057.
[10] Zhang Q, Ren Y F, Lin D, et al.The principle of Space Vector Pulse Width Modulation Algorithm(SVPWM) and simulation[J].Electrical Engineering,2010.
Research and Implementation of Integrated AC Servo System Based on DSP
LI Fu-rui, HU Qi-bo, LI Yang-sheng, LIU Jia, WANG Dong-zheng
(Hubei Sanjiang Space Hongfeng Control Co.,Ltd.,Xiaogan,Hubei 432000,China)
The current servo system, which obtains motor speed by using the AD sampling of angle sensor, cannot meet the requirements of speed real-time. And as the linearity of the position feedback element is low and the feedback signal is vulnerable to interference, it is difficult to ensure the stability of the servo system. To solve the problems of current servo system in its speed closed-loop, structural conversion efficiency, anti-interference ability, etc., an integrated design method of servo motor, reducing mechanism and rotary transformer is presented. The experiment shows that the servo control system presented has advantages of high precision (up to 16bit), strong anti-interference capacity and so on, and the method meets the requirements of deelopment of the future electric servo system.
Servo system; Anti-jamming; High-precision
10.19306/j.cnki.2095-8110.2017.03.006
2016-07-19;
2016-08-24
李福瑞(1983-),男,工程师,主要从事伺服机构研究。E-mail:lifurui2008@163.com
TP275
A
2095-8110(2017)03-0032-07
猜你喜欢
建材发展导向(2022年18期)2022-09-22
机床与液压(2022年8期)2022-09-19
北京航空航天大学学报(2022年6期)2022-07-02
石油化工设备(2020年5期)2020-12-11
商品与质量(2020年48期)2020-11-26
东坡赤壁诗词(2020年4期)2020-09-02
汽车实用技术(2020年4期)2020-04-10
航天制造技术(2016年6期)2016-05-09
北京航空航天大学学报(2016年4期)2016-02-27
知识就是力量(2014年3期)2014-03-06
