
液质悬浮式三自由度电机电磁特性的计算分析
2017-05-18 02:33李争聂雅盟薛增涛王群京
电机与控制学报 2017年4期
李争, 聂雅盟, 薛增涛, 王群京
(1.河北科技大学 电气工程学院, 河北 石家庄 050018;2.安徽大学 高节能电机及控制技术国家地方联合工程实验室,安徽 合肥 230601)
液质悬浮式三自由度电机电磁特性的计算分析
李争1, 聂雅盟1, 薛增涛1, 王群京2
(1.河北科技大学 电气工程学院, 河北 石家庄 050018;2.安徽大学 高节能电机及控制技术国家地方联合工程实验室,安徽 合肥 230601)
针对传统电机机械轴承所带来的摩擦损耗问题,提出一种新型液质悬浮式的三自由度电机,该电机引入液质流体可实现悬浮运动。详细阐述了该新型电机的工作原理及电磁特性,采用三维有限元软件对电机进行建模仿真,给出在平行充磁条件下单个磁极的磁通密度的三维曲面分布图,并从解析角度建立了电机磁密的数学方程,进而结合电机结构及磁通管原理,建立了球坐标系下的三维磁网络模型,获取了气隙磁场的磁密值与转矩值,得到了转矩在不同位置角下的变化情况,分析得到电机的输出性能。最后对样机进行测试并将实验结果与上述两类方法进行对比,验证了等效磁网络法建模的合理性。
多自由度电机;有限元;等效磁网络;气隙磁密;转矩
0 引 言
传统的多自由度电机虽相比于单自由度电机具有体积小,结构简单,效率高等特点,但因其定转子之间存在轴承支承的单一方式,转子受摩擦力影响显著,运动精确度受限,导致输出转矩的能力较差,增加了转动惯量,使电机系统运行不稳定[1-2]。
随着控制系统精确度要求的逐步提高,目前迫切需要寻找新的多自由度电机驱动机理以取代传统工作模式。本文创新性地提出了一种新型液质悬浮式三自由度电机,该电机因定转子之间注有油膜等液质润滑剂,对转子运动进行阻尼调节,可极大程度上消除摩擦。
首先建立了该电机的模型,分析其结构和运行原理,采用解析法及等效磁网络法(MEC)研究了电机的气隙磁场,在此基础上为判断电机输出性能的优劣将等效磁网络法与麦克思韦张量理论相结合,计算获得电机的电磁转矩。最后为了验证上述理论方法的准确性,搭建了实验平台进行测试,为后面进行电机控制研究奠定基础。
1 液质悬浮式永磁三自由度电机结构
新型三自由度电机模型的结构如图1所示,该电机独特之处在于定转子间密封加入油膜,对转子运动进行阻尼调节,偏转时形成的液体膜使得转子实现悬浮并自动定位,中空转子壳内表面环形位置上固定有一定厚度的贴片式永磁体,共计4片。
建模时以X轴为中线建立基准永磁体后将N、S极永磁体交替排列。在赤道位置上的永磁体可完成大范围转动,尾部的永磁体形状呈顶端隆起的圆盘状,可以实现精细位置的调节;转子外围安装有空心圆柱形定子线圈,通过对不同方位的定子线圈通电电流的方向和大小进行调节,配合垂直位置的永磁体来共同构成混合驱动模式。为保证电机运行时的对称性避免偏心运动,设定定子线圈数量为6个,电机本体结构如图1所示。
为分析转子永磁体空气域处的磁密分布状态,给出贴片式转子结构如图2所示,表1给出了磁极设计的具体参数。

图1 液质悬浮式三自由度电机本体结构图Fig.1 Structure of the liquid suspensionthree-degree-of-freedom motor

图2 贴片式永磁体结构图Fig.2 Structure of patch type permanent magnet表1 设计参数Table 1 Structure parameter

参数数值内径Rn/mm23外径Ry/mm25经度角β/(°)40高度H/mm16极对数P2剩余磁密Br/T1.15贴片式转子材料相对磁导率μm/(H/m)1真空磁导率μ0/(H/m)4π×10-7永磁体相对磁导率μr/(H/m)1.02
2 电机磁场及转矩分析
2.1 转子区域空间划分
以转子永磁体为基准将整个空间划分为三个区域,如图3所示,贴片式永磁体与圆柱形定子线圈相作用的空气域1(区域1产生的磁场是影响电机转矩大小的关键),贴片式转子磁极本体磁场2;转子永磁体内部空气域3。

图3 整体区域划分Fig.3 Overall regional division
2.2 气隙磁场有限元分析
液质悬浮式三自由度电机具有特殊的定转子结构,在进行磁场分析时可暂时忽略掉油膜及其产生的阻尼力及压力作用。为更好地体现转子磁极的特性,运用有限元软件对贴片式转子外围靠近磁极处的空气域磁场进行计算,为后续等效磁网络模型的建立打下基础,定义磁感应强度B为待求变量求解,静磁场下的磁感应强度B可表示如下:

(1)
其中BX、BY、BZ为在直角坐标系下三个方向的磁感应强度,为求得在球坐标系下磁密的径向分量,采用坐标变化的方法,将B在球坐标系下分解为沿θ、γ、φ3个分量,表达式如下:
Br=Bxcosφ+Bysinφ]sinθ+Bzcosθ,
(2)
Bθ=[Bxcosφ+Bysinφ]cosθ-Bzsinθ,
(3)
Bφ=Bycosφ-Bxsinφ。
(4)
将求解域设定为电机模型的2倍,整个区域的最外层边界满足Bn=0,为简化分析,以一块磁极为例,在场计算器中依据上式提取出气隙处的磁密φ、θ、r方向的三维图如图4~图6所示。


图4 Br三维曲面分布图Fig.4 Distribution Br of 3D surface

图5 Bθ三维曲面分布图Fig.5 Distribution Bθ of 3D surface

图6 Bφ三维曲面分布图Fig.6 Distribution Bφ of 3D surface
2.3 电机转矩有限元分析
液质悬浮式三自由度电机的运行机理是基于贴片式磁极产生的磁场和柱形绕组线圈通入直流电产生的磁场相互作用为依据,根据同性永磁体之间的作用力相互排斥,异性永磁体之间作用力相互吸引的规律来带动电机进行三自由度旋转,因径向气隙磁通密度能产生电磁转矩,在求得电机气隙磁场的基础上,继续对电机转矩的有限元模型进行阐述。


图7 自转转矩仿真图Fig.7 Spin rotationtorque

图8 偏转转矩仿真图 Fig.8 Deflection motion torque

2.4 气隙磁场解析法分析
利用解析法计算气隙磁场强度,根据图4将场域划分后的磁场特性表示如下[3-6]:
场域1:B1=μ0H1,
(5)
场域2:B2=μ0μrH2+μ0M0,
(6)
场域3:B3=μ0μsH3。
(7)
因电机转子部分在1、2、3区域中均无励磁电流,故这三个场域均满足条件:×HK=0;·Bk=0,k的取值为1、2、3。依据上述方程可知,空间三个场域的标量磁位均满足拉普拉斯方程如下:

(8)
结合磁场分量的连续性及边界条件,推得贴片式转子永磁体外气隙磁通密度表达式如下:

(9)

(10)

(11)
因在整个空间区域中,影响电机转矩值大小的主要为基波分量,故暂不考虑气隙磁场中存在的谐波分量对磁场的微弱影响,观察上式可知,气隙磁密的三个分量都是关于θ、φ的复合三角函数,进行绘制得到磁密曲线如下图:

图9 B三维空间分布图Fig.9 SubjectBof three dimensional spatial distribution
由以上三个磁密分布图观察可知,在只考虑基波分量的情况下,Br沿横坐标轴φ方向呈余弦函数曲线分布,因贴片式转子磁极对数P=2,故围绕转子一周内存在三个极大值和三个极小值,在建模过程中,每块永磁体空间角度相差90°,且设定基准永磁体的中线被X坐标轴平分,因此,磁密矢量在(90·2d)°时,d=0,1达到最大。同理,Bφ与Br的变化趋势相类似,沿φ方向呈正弦函数曲线分布,而与二者不同的Bθ在空间一周内共有8个极值点,在θ=20°时,Bθ大小为0。在进行磁场分析时,解析法因其拥有直观、简单等优点而得到广泛应用,但由于该方法只分析了气隙磁场在基波条件下的分布,且将永磁体结构等效为理想模型,因而并不能完整精确的表示整个复杂磁极的磁场具体分布情况,故为准确描述气隙磁密的变化趋势,采用具有较高精度和较快运算速度的等效磁网络法来求解不同位置下的磁感应强度B。
3 磁网络法应用
解析法在求解永磁体磁场特征时,其计算结果通常为复杂的空间球谐波函数,为简化分析,一般将永磁体结构等效为理想模型,但这可能会导致一系列空间谐波的出现,而无法精确表述贴片式转子磁极磁场分布的复杂情况。针对该情况,等效磁网络法因其可较为精确的计算电机磁场参数且计算时间短而得以应用[7]。
在评价电机性能好坏时,首要考虑的因素是转矩大小是否合理,针对该新型电机的结构和工作原理分析可知,电机可进行三自由度运动,主要依靠贴片式永磁体产生磁场和圆柱形定子线圈通电产生磁场的相互作用。故将采用MEC法和有限元法对定子线圈所处的空气区域1处的磁通密度大小进行计算分析。
等效磁网络法依据磁通管原理,在球坐标系下将整个空间不同区域划分为若干个磁通管,在球坐标系下将各区域中磁通密度变化相对稳定的部分作为一个小单元[8],任意单元在空间球坐标系下的位置由θ、φ、r表示。
图10给出了磁通沿不同方向流入中心节点的示意图,其中小角标i代表第i个元素,u表示磁位,磁阻与磁势分别用R、F代替,各单元之间通过相邻节点连接。
3.1 边界条件分析
任意磁极的磁力线关于磁极中心线对称,以X-Y平面纬度方向为例进行分析(经度方向剖分原则一致),剖分示意图如图11所示,建模时做如下假设:
1.分析电机磁场时,忽略磁场变化引起的涡流效应。
2.不同位置处的空气域磁导率相同。
3.空气域3处磁场强度较弱,磁位降可近似忽略,其与永磁体相接触的边界磁位相等。
4.位于N、S极转子永磁体交界面上节点磁位相等,因此该位置上的节点短路,将其设置为磁位参考点0。
5.在X-Y切面沿φ方向处的最外层空气域,磁场满足平行边界条件,B=0,该位置上相应节点断路。
6.位于边界X轴上的节点,因磁场平行于永磁体这个方向的切平面中心线,故B=0,此处节点断路。

图10 三维等效磁网络图Fig.10 3D equivalent magnetic network

图11 网格剖分图Fig.11 Mesh generation
3.2 各元素参数计算
磁阻单元根据磁通管流量方向的不同分解为径向磁阻单元Ri,r、沿经度方向磁阻单元Ri,θ、沿纬度方向磁阻单元Ri,φ,鉴于求解域在空间球坐标系下,故其小单元的面元矢量计算公式如下[9-11]:
(12)
结合式(12),推得各方向上的磁阻表达式如下:

(13)

(14)

(15)
转子芯处空气域3为无源区域,故该区域三个方向上的磁动势F=0。如图3所示,永磁体的结构由参数β和α角决定,充磁方向平行于赤道平面,垂直于转子球面,因而该永磁体剩余磁化强度M0可表示为

(16)

结合式(16)得到贴片式转子永磁体的每个磁阻单元的磁动势在球坐标系下可以表示为:
(17)
上式中Cr、Cθ、Cφ为小单元沿不同方向的长度。
3.3 磁路模型的分析求解
根据磁路的基尔霍夫定律可知:穿入节点的磁通量恒等于穿出节点的磁通量,可得:
φi,r,1+φi,r,2+φi,θ,1+φi,θ,2+φi,φ,1+φi,φ,2=0,
(18)

(19)
根据图10得到磁通量与磁阻、磁位和磁势之间数学关系如下

(20)
由此,根据磁场能量性质可求得单元磁通密度沿r、θ、φ三个方向的表达式如下[9]
(21)
式中:V为每个小磁阻单元的体积,其中Bi,m的正负由其所对应的转子磁极决定。
3.4 结果验证
所提出的电机结构中,贴片式磁极结构相对简单,极对数较少,以整体为研究对象,在平行充磁的方式下观察磁极周围空气域中θ、φ、γ方向上的磁密幅值。
图12和图13分别给出,靠近以及远离贴片式磁极处的空气域中的磁密曲面图。

图12 靠近永磁体处磁密分布对比图Fig.12 Comparison of the magnetic density distributionnear the permanent magnet

图13 远离永磁体处磁密分布对比Fig.13 Comparison of magnetic density distribution with permanent magnet
观察可知磁密在磁极中心线处呈对称分布,远离永磁体处的磁密曲线图与靠近永磁体位置处的曲线图差异明显,磁密值降低幅度较大,气隙磁通密度的径向分量降低8%,考虑到径向分量能够产生电磁转矩影响电机转动,因此再设计定转子永磁体相对位置时要尽量让两者在合理范围内缩短间距。
图14为沿φ方向上的磁密曲线,Br在绕赤道半周具有两个波峰,两个波谷,与研究的2对磁极结构相一致。
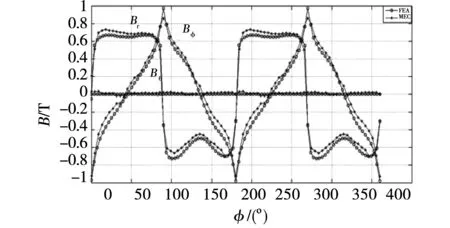
图14 周向磁密分布对比图Fig.14 Comparison of the circumferential magnetic flux distribution
4 转矩模型求解
4.1 基于麦克斯韦张量法的转矩模型建立
在忽略磁路饱和的前提下,多对定子绕组和贴片式转子相互作用产生的合转矩即为独立线圈通电时产生的转矩之和,因而对单个定子绕组与相邻永磁体间产生的电磁转矩进行分析就必不可少。结合上述得到的气隙磁密结果,采用计算量小,求解较简单的麦克斯韦张量法来进行求解[12-15]。
在磁场中,作用在求解物体上的力F可表示为
F=∫V·TzdV=∮sTz·ndS。
(22)
式中:S为包围所求区域的任意闭合曲面,Tz为磁场的三阶张量,n为曲面S的单位法向量,方向背离物体。
将定子线圈在柱坐标系下剖分成若干小单元,则式(22)可转化为

(23)

推得线圈所受总电磁力如下

(24)
定子线圈如图某某中围绕坐标轴旋转,转矩是闭合曲面S上的切向力与空间内任一点到旋转轴线的距离re之积,给出各单元转矩公式如下

(25)
进而得到全局坐标下定子绕组所受转矩为

(26)
求解时将定子绕组剖分为530个单元,选定闭合曲面为包围柱形绕组的上下底面Su、Sl和侧面Sc如图15所示。

图15 剖分图Fig.15 Subdivision graph
为验证有限元法和等效磁网络法计算的准确性,设计制作出如图16所示的电机原型,并进行测试。实验样机结构包括圆柱定子线圈、贴片式转子永磁体、外壳、底座。定子绕组采用硬铝材料,由空心圆柱轴固定,最大工作电流为10 A,转子球体使用密度较小的非导磁材料,为增大定、转子间的气隙磁密,在该样机中安装转子铁心;输出轴与转子中心相连,以便测量输出转矩。
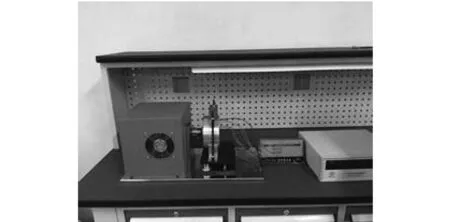
图16 电机样机试验台Fig.16 Test bench of motor prototype
4.2 结果验证
考虑电机在做自转运动时,主要依靠沿φ方向的电磁力驱动,而偏转时以θ向的切向力为主,因而分别给出自转转矩沿φ方向的实验对比图17和偏转转矩沿θ向的实验对比图18如下。


图17 自转转矩对比图Fig.17 Spin rotation torque comparison

图18 偏转转矩对比图Fig.18 Deflection motion torque comparison
图18中所示偏转转矩沿θ方向以90°为临界点,当线圈位置处于临界点时,电磁转矩为0,在θ=66.25°时,偏转转矩出现最小值-0.060 30N·m,当90°<θ≤120°时,转矩随纬度角的增加呈递增趋势。
对等效磁网络与有限元法所得结果进行总结如表2所示,两种方法获得的磁密和转矩曲线变化趋势大体一致,但其在幅值上略有不同,将周向气隙磁场沿φ方向的分量Br、Bφ、Bθ,自转转矩Tz、偏转转矩Tp的值进行了分析对比,由表2可知,采用磁网络法的计算结果往往大于有限元法,磁密和转矩的最大误差分别达到8%、7%,属于工程应用合理范围内。这是由于等效磁网络法剖分的小单元体积相对大,剖分较为粗糙,且建模过程中忽略了端部效应和漏磁影响,导致其在数值上略高。

表2 磁场模型等效磁网络法与有限元法数据比较Table 2 Comparison of the MEC method and FEM data on the magnetic field model
5 结 论
本文分别采用有限元法、解析法以及等效磁网络法对液质悬浮式三自由度电机的磁场和转矩进行了计算。通过磁场分析得知电机设计的结构参数会影响气隙磁密在空间的分布状态。其转矩分布与磁场分布相类似,只是其幅度范围及方位角不同,进而得出影响电磁转矩数值大小的关键因素在于定、转子间相对位置关系。在求解磁场及转矩时等效磁网络法并未将端部效应以及漏磁等影响因素考虑进来,且建模过程中可能存在网络剖分粗糙,小单元体积选取过大等因素,从而导致计算结果略高于有限元法。通过实验对MEC法与有限元法所得结果进行对比,结果表明采用MEC法得到的数据结果在误差范围内完全吻合,验证了等效磁网络法建模的合理性,为该新类电机的设计分析奠定了理论基础。
[1] 李争, 王群京.永磁多维球形电动机的研究与发展现状[J].微特电机, 2006, 4(10): 7-11. LI Zheng, WANG Qunjing.The present research and development situation of permanent magnet spherical motor of multi-dimensions[J].Small and Special Electrical Machines, 2006, 34(10): 7-11.
[2] 李争, 孙克军, 王群京, 等.一种多自由度电机三维磁场分析及永磁体设计[J].电机与控制学报, 2012, 16(7): 65-71. LI Zheng, SUN Kequn, WANG Qunjing, et al.3D magnetic field analysis and permanent magnet design of a M-DOF motor[J].Electric Machines and Control, 2012, 16(7): 65-71.
[3] 孟大伟, 马林.基于磁网络法的潜油电机起动性能计算[J].哈尔滨理工大学学报, 2014, 19(2): 73-77. Meng Dawei, MA Lin.Magnetic network method for the starting performances calculation of submersible motor[J].Journal of Harbin University of Science and Technology.2014, 19(2): 73-77.
[4] 李争, 张玥, 王群京, 等.永磁转子偏转式三自由度电机磁场解析建模与分析[J].中国电机工程学报, 2013, 33(S1): 219-225. LI Zheng, Zhang Yue, Wang Qunjing, et al.Analytical modeling and analysis of magnetic field for a novel 3-DOF deflection type PM motor[J].Proceedings of the CSEE, 2013, 33(S1): 219-225.
[5] ONER Y ALTINTAS A.Computer aided design and 3D magnetostatic analysis of a permanent magnet spherical motor[J].Journal of Applied Science, 2007, 7(22): 3400-3409.
[6] 信建国, 夏长亮, 李洪凤, 等.基于解析模型的永磁球形电机永磁体优化设计[J].电工技术学报, 2013, 28(7): 87-95. XIN Jianguo, XIA Changliang, LI Hongfeng, et al.Optimization design of permanent magnet array for spherical motor based on analytical model[J].Transactions of China Electrotechnical Society,2013, 28(7): 87-95.
[7] AMRHEIN M, KREIN P T.3-D Magnetic equivalent circuit framework for modeling electromechanical devices[J].IEEE Transactions on Energy Conversion, 2009, 24(2): 397-405.
[8] JUNG I S, JIN H, HYUN D S.3-D analysis of permanent magnet linear synchronous motor with magnet arrangement using equivalent magnetic circuit network method[J].IEEE Transactions on Magnetics, 1999, 35(5): 3736-3738.
[9] SUDHOFF S D, KUHN B T, CORZINE K A, et al.Magnetic equivalent circuit modeling of induction motors[J].IEEE Transactions on Energy Conversion, 2007, 22(2): 259-270.
[10] LI Bin, LI Guidan, LI Hongfeng.Magnetic field analysis of 3-DOF permanent magnetic spherical motor using magnetic equivalent circuit method[J].IEEE Transactions on Magnetics, 2011, 47(8): 2127-2133.
[11] RAMINOSOA T, FAROOQ J A, DJERDIR A, et al.Reluctance network modelling of surface permanent magnet motor considering iron nonlinearities[J].Energy Conversion and Management, 2009, 50(5): 1356-1361.
[12] KANIO Y, KOSAKA T, MATSUI N.Simple nonlinear magnetic analysis for permanent-magnet motors[J].IEEE Transactions on Industry Applications, 2005, 41(5): 1205-1214.
[13] NI Youyuan, WANG Qunjing, BAO Xiaohua, et al.Optimal design of a hybrid excitation claw-pole alternator based on a 3-D MEC method[C]//International Conference on Electrical Machines and Systems: IEEE.2005: 644-647.
[14] 万山明, 黄声华, 傅光洁, 等.空间坐标系中的三维电动机[J].中国电机工程学报,1998, 18(5): 305-309. WAN Shanming, HUANG Shenghua, FU Guangjie et al.Three-dimensioned motor in spacial coordinate system[J].Proceedings of the CSEE,1998,18(5):305-309.
[15] 秦伟, 范瑜, 李硕, 等.电磁电动式磁悬浮装置的磁场分析和力特性研究[J].电机与控制学报, 2012, 16(1): 67-71. QIN Wei, FAN Yu, LI Shuo, et al.Characteristic and magnetic field analysis of electro-magnetic electro-dynamic levitation device[J].Electric Machines and Control, 2012, 16(1): 67-71.
(编辑:贾志超)
Calculation and analysis of electromagnetic characteristics of liquid suspension type three-degree-of-freedom motor
LI Zheng1, NIE Ya-meng1, XUE Zeng-tao1, WANG Qun-jing2
(1.College of Electrical Engineering, Hebei University of Science and Technology, Shijiazhuang 050018, China;2.National Engineering Laboratory of Energy-saving Motor & Control Technique, Anhui University, Hefei 230601, China)
According to the friction loss problems caused by the traditional mechanical bearings, a new liquid suspension type three-degree-of-freedom motor is presented, which can complete frictionless movement by introducing liquid fluid into the motor.The working principle and electromagnetic characteristics of this new type motor are described in detail.By using 3D finite element software for the motor's modeling and simulation, the 3D surface distribution profiles of single-pole magnetic flux density under the condition of parallel magnetization are given, and the mathematical equations of the motor's magnetic flux density from an analytical point of view is established.Then, combined with the motor structure and the magnetic flux tube principle, the 3D magnetic network model is built in the spherical coordinate, and the flux density and torque values of the air gap magnetic field are derived.The change of torque at different position angles is also obtained, and the output performance of the motor is analyzed and derived.Finally, the test is conducted on the prototype and the experimental results are compared with the above two methods, which verifies the rationality of the equivalent magnetic network modeling.
M-DOF motor; equivalent magnetic network; finite element method; air gap flux density; torque
2016-04-25
国家自然科学基金(51577048, 51637001, 51107031);高节能电机及控制技术国家地方联合工程实验室开放课题项目(KFKT201601);河北省增材制造产业技术研究院开放课题项目;河北省留学人员科技活动项目择优资助项目(C2015003044)
李 争(1980—),男,博士,教授,研究方向为特种电机及其控制,新型电力传动装置; 聂雅盟(1991—),女,硕士研究生,研究方向为新型多自由度电机及其控制技术; 薛增涛(1963—),男,硕士,副教授,研究方向为电机及其控制技术; 王群京(1960—),男,博士,教授,博士生导师,研究方向为电机及其控制。
李 争
10.15938/j.emc.2017.04.007
TM 301
A
1007-449X(2017)04-0044-09
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2021年4期)2021-07-28
大电机技术(2021年2期)2021-07-21
时代汽车(2021年6期)2021-04-09
微特电机(2021年1期)2021-01-25
防爆电机(2020年4期)2020-12-14
仪表技术与传感器(2020年5期)2020-06-11
大电机技术(2018年4期)2018-09-26
水电与抽水蓄能(2018年1期)2018-03-07
北京航空航天大学学报(2017年3期)2017-11-23
