
高速永磁无刷直流电机无位置全转速控制策略
2017-05-18 02:33陈少华刘刚郑世强郭金超
电机与控制学报 2017年4期
陈少华, 刘刚, 郑世强, 郭金超
(1.北京航空航天大学 惯性技术国防科技重点实验室,北京 100191;2.北京航空航天大学 新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191;3.北京市高速磁悬浮电机技术及应用工程技术研究中心,北京 100191)
高速永磁无刷直流电机无位置全转速控制策略
陈少华1,2,3, 刘刚1,2,3, 郑世强1,2,3, 郭金超1,2,3
(1.北京航空航天大学 惯性技术国防科技重点实验室,北京 100191;2.北京航空航天大学 新型惯性仪表与导航系统技术国防重点学科实验室,北京 100191;3.北京市高速磁悬浮电机技术及应用工程技术研究中心,北京 100191)
针对高速磁悬浮大功率永磁无刷直流电机无位置传感器起动问题,分析了高速磁悬浮无刷直流电机运行时导通相磁链函数与相电压的精确表达式,给出了转子位置和电机磁链的函数方程,分析了高速磁悬浮无刷直流电机低速时转子位置难以检测的原因。据此分析提出了一种基于高速电机绕组磁链函数的新型无位置控制G函数方法,以换相前后非换相相电流幅值等值为控制目标,以G函数换相阈值为控制量,通过PI调节来保证相位可靠校正,实验验证了该闭环校正方法应用于磁悬浮鼓风机无刷直流电机时,在20 000 r/min范围内能够对换相信号误差进行了实时补偿,实现全转速运行。
磁悬浮鼓风机;无刷直流电机;无位置传感器;G函数;换相阈值
0 引 言
高速磁悬浮永磁无刷直流电机以其功率密度高、转子无摩擦损耗,噪声低、重量轻等优点,被广泛应用于鼓风机、压缩机等高端工业制造装备中。
传统的无刷直流电机安装的霍尔传感器增加了电机的体积和成本、可靠性低、抗扰动能力弱,严重限制了其应用发展[1]。近年来提出的无刷直流电机无位置传感器控制策略从根本上解决了传递霍尔传感器的弊端。因此无刷直流电机无位置传感器研究具有重要意义。
无位置传感器控制策略发展至今,主要包括反电势法(EMF)[1-3],三次谐波法[4-5],反电势积分法[6-7],磁链估测法[8],续流二极管法[9],智能控制算法[10-11]等。其中反电动势法目前应用最为广泛,但低速时反电动势幅值难以检测,高速时低通滤波、电路延时等因素导致位置信号产生误差,严重影响电机性能。
文献[12]研究了端电压法检测误差,通过相电流偏差判定转子位置超前或滞后,提出一种转子位置闭环校正方法,但检测电路对大功率电机不太合适;文献[13]通过硬件电路实现相位固定延时90°得到转子位置信号,但高速电机滞后相位难以实施补偿;文献[11]针对小电感电机,将三相H桥结构引入到电机的三相六状态控制中,实现了反电动势过零点检测,但实现较为复杂;文献[14-19]基于铁心饱和效应或者电机凸极效应,主要研究了电压注入式控制方法,判定转子初始位置进而实现启动,但本实验电机凸极效应不明显,难以实现;文献[20]采用新型反电动势检测方法,消除了滤波电路带来的误差,但是当续流超过30°时不能检测到反电动势过零点,可靠性不高。
针对高速磁悬浮鼓风机用无刷直流电机的定子电阻和电感极小的特点,分析传统无位置传感器控制方法低速时相位难以检测的原因,在传统无位置控制G函数方法的基础上,提出了一种优化的绕组磁链函数无位置控制方法,以换相前后非换相相电流微分等值为控制目标,以G函数换相阈值为控制量,通过PI调节来保证相位可靠校正
通过仿真和实验验证了该闭环校正方法应用于磁悬浮鼓风机无刷直流电机时,在20 000 r/min范围内能够对换相信号误差进行了实时补偿,实现全转速运行。
1 无刷电机数学模型与换相分析
1.1 高速无刷直流电机数学模型
采用的高速磁悬浮无刷直流电机驱动系统拓扑结构,如图1所示。

图1 高速磁悬浮无刷直流电机驱动系统拓扑结构Fig.1 Topological structure of the brushless DC motor based on Buck Converter
假设电机定子三相完全对称,各相绕组R,L参数完全相同;忽略定子绕组电枢反应的影响;电机气隙磁导均匀,磁钢性能一致,忽略磁路饱和,涡流损耗、铁耗、漏感及电流饱和效应。无刷直流电机相电压方程如下所示
(1)
其中:Ua、Ub、Uc分别为电机三个相电压;ia、ib、ic分别代表电机三相线(相)电流;ea、eb、ec分别代表电机三个相反电势;R、L分别代表相电阻、电感。
1.2 无位置传感器转子位置检测分析
传统的基于电机反电动势无位置控制方式通过检测电机不导通相的端部电压,经过滤波处理后与电机绕组中线电压进行比较,得到反电动势的过零点信号,延时30°作为转子换向信号。但电机在静止或者转速很低时,电机端部电压为零或非常低,需要通过开环外同步的方法将电机强拖到一个较高的转速。用于端部电压检测的滤波电路和电压比较电路如图2所示。
无刷直流电机采用PWM调制时,电磁转矩为

(2)
式中:Te为电机电磁转矩,ωm为电机角速度,e为相反电动势,i为相电流,E为反电动势幅值,对于同一台电机。从式(2)知,随电流增大,电机电磁转矩增大,当电磁转矩大于负载转矩时,电机开始旋转,实现启动。等效电路如图2所示,Ud为电机定子绕组两端的电压,L为等效电感,R为等效电阻,e为导通相等效反电动势。

图2 电机非导通相端部电压检测电路Fig.2 Voltage detection circuit of motor phase

图3 电机启动时等效电路Fig.3 Equivalent circuit of motor start-up
其等效电流幅值为

(3)
当采用单管PWM控制启动,在电机转速很低时,等效反电动势e≈0,且ω≈0。以实验电机为例,Ud=100 V,R≈1.5×10-3Ω,调制频率为5kH,最小占空比为0.1时,,瞬间启动电流幅值 ,导致功率器件损坏。单管PWM调制启动时实验波形如图3所示,启动相电流峰峰值400A,启动后PWM调制高频噪声易干扰转子位置信号,导致电机错误换相,产生相电流波动,电流波动引起电机转矩脉动,易导致启动失败,同时易产生电机噪声,电机涡流损耗增大,影响电机寿命。
如图4所示,电机在“三段式自启动”阶段,相电压波形畸变严重,相电流幅值过大,母线电压随PWM调制波动。如图5所示,由于采用PWM斩波调整定子侧电压,转子位置信号中包含有高频干扰信号,会导致转子“误换相”。此时,相电流出现尖峰,出现电机负转矩,电机噪声增大,严重时,电机堵转,损坏功率器件。

图4 电机启动时相电压,相电流和母线电压波形Fig.4 Phase voltage,phase current and bus voltage in start-up

图5 PWM调制电机启动时转子位置信号Fig.5 Rotor position signal in start-upby PWM modulated
因此,针对极小电阻电感高速磁悬浮无刷直流电机需要专门设计启动控制策略和相位校正策略。
2 电机换相特性分析
无刷直流电机反电动势表示为

(4)
其中:n=a,b,c,ke为反电动势系数。
将式(4)代入式(1)可得,

(5)
为便于计算,通过类比式(5),线电压方程式为

(6)
同理可得

(7)

(8)
fxyr(θ)为反映转子位置的磁链形式函数。由式(6)得

(9)
Hab(θ)是一个关于转子位置的函数,可用于电机转子位置的估算。但由于函数中包含转速因子,在低速时转速不平稳,高速时产生误差累计。为此,将反电动势相邻两式相除以消去转速项,可得

(10)


(11)

(12)
G(θ)函数可以通过测量电压、电流和相关参数信息得到。由于函数中不包含速度变量,所以它是速度无关的函数,可实现任意速度的转子位置估计。可得H(θ)函数、G(θ)函数、相电流和位置信号的波形图如图6所示。
如图所示,在一个换相周期内,线性函数H(θ)依次连续相比,可得到与速度无关的G(θ)函数,其换相点就是G(θ)函数的最大峰值点。但是检测电路必然导致相位延迟,因此需要在G(θ)函数的最大峰值点之前换相,假设F为换相阈值,当G(θ)函数值大于F时即开通换相信号。由于G(θ)函数与电机转速无关,因此在电机转速很低时仍然可以通过计算G(θ)函数得到电机转子位置信号,实现换相。在高速时由于检测电路延时和计算误差易导致G(θ)函数计算偏差,因此需要闭环校正换相阈值F,实现高效精确换相。

图6 H(θ)函数、G(θ)函数、相电流和位置信号Fig.6 H(θ)function,G(θ)function,phase current and position signal
由于电机电感的存在,换相电流将会出现两个阶段。第1个阶段由于关断相电感中的电流不能立刻突变,将通过二级管进行续流。大功率高速磁悬浮电机,电机电阻和电感都非常小。所以,电机换相时间接近0,可以忽略。第2个阶段是换相结束后相电流已经建立,B+,A-导通。换相第1阶段,VT3、VT4以及与VT5反并联的二极管同时导通,电路状态示意图如图7所示。
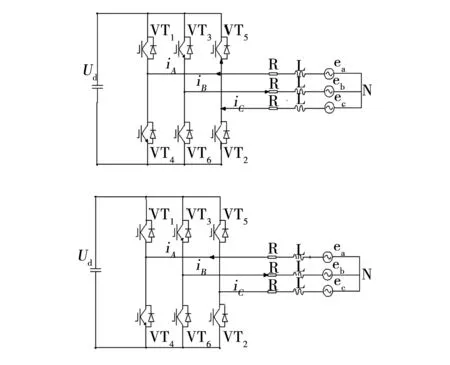
图7 正常换相第1阶段电路状态示意图Fig.7 Schematic diagram of the state of the normal commutation circuit
三相相反电势ea、eb、ec方程分别为:
(13)
E代表反电势有效值。
当VT3、VT4导通,此时电路状态示意图如图6(b)所示:由ia+ib=0,ic=0,和式(1)得到

(14)
求解式(14)得到

(15)

由式(15)可看出,正常换相时,时间常数τ非常小,可忽略不计,式(15)可以简化为

(16)
正常换相时,ib的波形如图8所示,从中可看出换相前后非换相相电流幅值相等。超前换相时,B+,A-导通,C-关断,ud=ub-ua,超前ε′(ε′>0)角度换相时,结合ia+ib=0,ic=0,和式(1)得到
(17)
求解式(17)得到


(18)
由于时间常数τ非常小,同理式(18)可以简化为:
(19)
超前换相ε′角度时,ib对应的波形图如图8(b)所示,从中可以看出:超前换相时,换相前后非换相相电流幅值不相等,超前换相角度越大,幅值差别越大,电流波动幅值越大。

图8 正常换相第2阶段ib与线电势的关系图Fig.8 Relationship of ib and line back-EMF in the second stage of normal commutation
滞后换相时电流表达式为:

(20)
同理当B+,A-导通时式(20)可以简化为

(21)
超前换相ε′角度时,ib对应的波形图如图8(c)所示,从中可以看出:超前换相时,换相前后非换相相电流幅值不相等,滞后换相角度越大,幅值差别越大。
综上所述:超前或者滞后换相都会使电流脉动加大,且超前角或者换相角越大,电流脉动越大。
3 无位置传感器全转速控制策略
以G(θ)函数值阈值F为控制量,以非换相相在换相前后电流幅值偏差相等为控制目标,提出一种校正无位置传感器全转速控制策略。新型控制系统如图9所示,整个控制系统主要由转速环、电流环、反电势换相信号检测、换相策略控制等环节构成。电机经过预定位和启动之后,切换到无位置工作状态,与传统的无刷直流电机调速系统相比,给出的控制系统针对极小电感电机启动困难、高速相位误差大等问题实现了全转速运行。

图9 带有换相信号位置偏差补偿的新型调速系统Fig.9 New speed control system with the commutation error compensation

4 实验验证与分析
在以上分析基础上搭建实验平台,采用TI公司的DSPTMS320LF28335控制芯片,PWM调制频率10kH,逆变桥采用英飞凌6PS18012E4FG35689模块,采用4极电机,额定转速20 000 r/min,额定转矩150 N·m,额定功率100 kW,额定电流210 A。实验平台如图10所示。

图10 系统实现框图Fig.10 System block diagram
当电机静止或速度很低时,无法检测到换相信号,采用“三段式起动”方法。首先任意导通两相绕组,为防止力矩为零或力矩极小的情况,再导通相邻两相绕组,两次定位,保证将转子定位在固定的位置上。然后采用升频升压的方式逐步提升电机转速。直到得到准确的G函数,确定准确的换相信号时,切换到无位置闭环校正换相控制阶段。G函数波形,换相信号波形和相电流波形如图13所示。
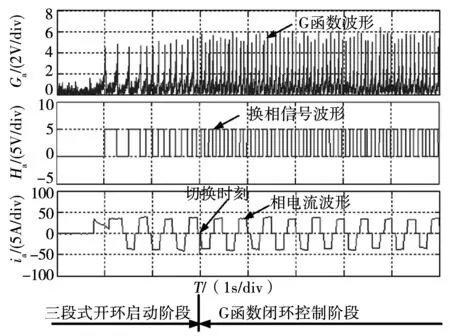
图11 G函数闭环校正启动时电压,电流和转子位置信号Fig.11 Voltage,current and rotor position signal by G function
由图11可知,先由“三段式起动”,采用两步定位法,确定转子位置,然后采用升频升压的方式逐步提升电机转速,直到G函数被精确检测到,切换到无位置闭环校正换相控制阶段。
针对本实验室电机采用传统的“三段式起动”时,相电流,相电压,位置信号波形如图12所示。

图12 “三段式起动”,相电流,相电压,位置信号波形Fig.12 Phase voltage,phase current and rotor position signal in traditional way
如图12所示,在电机外同步强推时,由于采用PWM调制,高频PWM信号导致位置信号包含大量高频干扰信号,易换相失败;且由于本实验电启动负载转矩很大,需要设计复杂的启动曲线,启动阶段当负载变化时极易导致启动失败。
为验证G函数闭环校正控制策略在系统负载变化时的有效性,当电机运行时,突然改变电机负载,图13(a)为电机负载突然增大时,电机相电压,相电流和直流母线电压波形,图13(b)为电机负载突然减小时,电机相电压,相电流和直流母线电压波形。
由图13可知,在电机由外同步强推到自同步切换时,电机负载突变时会影响电机切换时间,当电机负载突然增大时,电机相电流增大,电机转速降低,此时无法,故电机仍处于强推状态,继续升速,直至到号,实现自同步切换;当电机负载突然变小时,电机相电流减小,电机转速增大,当G函数信号能被精确检测到时,实现自同步切换。该控制策略在启动阶段具有鲁棒性。
采用软件滤波在电机转速达到3 000 r/m以上时,采用PWM调制会造成严重的相位滞后,由于采用软件滤波屏蔽启动时的高频干扰信号,高速时,滤波产生的延时导致转子位置信号无法精确提取,相电压和相电流波形图发生畸变,严重时导致电机转子位置信号提取错误,产生误换相,发生电机堵转,损坏功率器件。为此在高速时,采用PAM控制,且退出软件滤波,按照G函数闭环校正控制策略实时补偿转子位置信号,电机转速在6 000 r/min和20 000 r/min时,电机相电压和相电流波形如图14所示。

图13 G函数校正策略下电机负载突然变化时,相电压、相电流和直流母线电压波形Fig.13 Phase voltage and phase current waveform when the motor load suddenly changed by G function

图14 电机在6 000 r/min和20 000 r/min时,相电压和相电流波形图Fig.14 Phase voltage and phase current waveforms of the motor in 6 000 r/min and 20 000 r/min
由图14可知,电机转速在6 000 r/min和20 000 r/min时,电机相电压和相电流波形对称,实现转子位置信号精确补偿。
图15是n=8 000 r/min时电机带载三相电流,其中图15(a)是超前换相时的三相电流,此时换相前电流幅值小于换相后的电流幅值,图15(b)是滞后换相时的三相电流,此时换相前的电流幅值大于换相后的电流幅值,图15(c)是采用G函数闭环校正之后的三相电流,经过闭环校正之后,三相电流的波形对称,精确补偿了换相误差角度。

图15 n=8 000 r/min三相电流波形Fig.15 Three-phase current waveform of 5 000 r/min
图16是n=20 000 r/min时电机带载三相电流,图16(a)是超前换相时的三相电流,图16(b)是滞后换相时的三相电流,图16(c)是采用闭环校正之后的三相电流,经过闭环校正之后,电机准确换相,换相误差被校正。
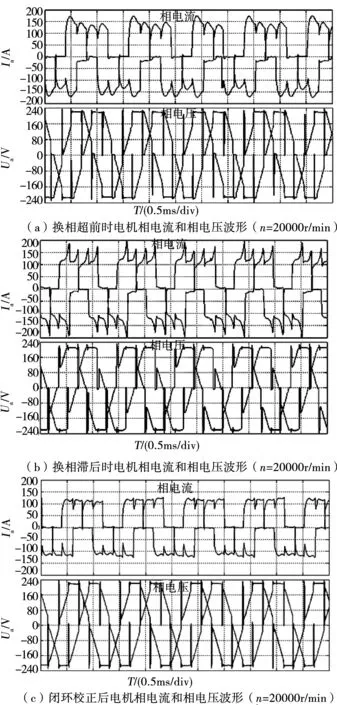
图16 n=20 000 r/min三相电流波形Fig.16 Three-phase current waveform of 20 000 r/min
5 结 论
本文采用的基于G函数的无位置换相闭环校正策略能够保证电机小电流安全启动,高速平稳运行,精确补偿了换相误差,硬件电路实现简单。
1)给出高速大功率磁悬浮电机无位置启动电流幅值巨大的原因,分析了基于线反电动势的无位置传感器正常换相与不准确换相时相电流的精确表达式;
2)提出一种基于G函数的低速无位置换相信号检测新型控制方法,通过构造与电机转速无关的G函数,将G函数阈值作为换相信号,有效的降低了大功率电机的无位置启动切换转速,减小了启动电流。
3)实验证明本文给出的基于G函数的无位置闭环校正策略能够对换相信号偏差进行有效的、实时的补偿,提高无位置传感器的换相精确度,而且硬件电路实现相对简单。
[1] 李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):39-25. LI Zhiqiang,XIA Changliang,CHEN Wei.A position sensorless control strategy for BLDCM based on line Back-EMF[J].Transactions of China Electro technical Society,2010,25(7):39-25.
[2] LIN C T,HUNG C W,LIU,C W.Sensorless control for four-switch three-phase brushless DC motor drive [J],in Conf.Rec.IEEE IAS Annu.Meeting,2006,4:2048-2053.
[3] 张磊,瞿文龙,陆海峰,等.一种新颖的无刷直流电机无位置传感器控制系统[J].电工技术学报,2006,21(10):26-30,43. ZHANG Lei,QU Wenlong,LU Haifeng,et al. A novel sensorless control system of brushless DC motors [J]. Transactions of China Electro technical Society,2006,21(10):26-30,43.
[4] 韦鲲,任军军,张仲超.三次谐波检测无刷直流电机转子位置的研究[J].中国电机工程学报,2004,24(5):163-167. WEI Kun,REN Junjun,ZHANG Zhongchao.Research on the scheme of sensing rotor position of BLDCM based on the third harmonic component[J].Proceedings of the CSEE,2004,24(5):163-167.
[5] SHEN J X,IWASAKI S,Sensorless control of ultrahigh-speed PM brushless motor using PLL and third harmonic back-EMF[J].IEEE Trans.Ind.Electron.,2006,53(2):421-428.
[6] JAHNS T M,BECERRA R C,EHSANI M,Integrated current regulation for a brushless ECM drive[J].IEEE Trans.Power Electron.,1991,6(1):118-126.
[7] 周波,魏佳.反电势逻辑电平积分比较法实现的无刷直流电机无位置传感器控制[J].电工技术学报,2000,15(4):5-9. ZHOU Bo,WEI Jia.A new method of indirect sensing for rotor flux position of a sensorless brushless DC motor[J].Transactions of China Electro technical Society,2000,15(4):5-9.
[8] ERTUGRUL N,ACARNLEY P,A new algorithm for sensorless operation of permanent magnet motors [J].IEEE Trans.Ind.Appl.,1994,30(1):126-133.
[9] 宋飞,周波,吴小婧,校正无位置传感器无刷直流电机位置信号相位的闭环控制策略[J].中国电机工程学报,2009,29(12):52-56. SONG Fei,ZHOU Bo,WU Xiaojing.Closed loop vontrol method to correct position phase for sensorless brushless DC motor[J]. Proceedings of the CSEE,2009,29(12):52-56.
[10] 邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009,24(4):48-53. ZOU Jibin,JIANG Shanlin,ZHANG Hongliang.A novel method of detecting for rotor position of a sensorless brushless DC motor[J].Transactions of China Electro Technical Society,2009,24(4):48-53.
[11] 石坚,李铁才,王孝伟,等.小电感无刷直流电动机三相H桥无位置传感器控制方法[J].中国电机工程学报,2014,34(12):1905-1911. SHI Jian,LI Tiecai,WANG Xiaowei,et al.A sensorless control method of small inductance brushless DC motors with three-phase H-bridge connection[J].Proceedings of the CSEE,2014,34(12):1905-1911.
[12] 史婷娜,吴志勇,张茜,等.基于绕组电感变化特性的无刷直流电机无位置传感器控制[J].中国电机工程学报,2012,32(27):45-52. Shi Tingna,WU Zhiyong,ZHANG Qian,et al.Sensorless control of BLDC motors based on variation behavior of winding inductances[J].Proceedings of the CSEE,2012,32(27):45-52.
[13] 王强,王友仁,孔德明,等.隐极式无刷直流电机转子初始位置估计[J].中国电机工程学报,2012,32(33):105-110. WANG Qiang,WANG Youren,KONG Deming,et al.Initial rotor position estimation for non-salient pole brushless DC motors [J].Proceedings of the CSEE,2012,32(33):105-110.
[14] 王高林,杨荣峰,李刚,等.基于高频信号注入的 IPMSM 无位置传感器控制策略 [J].电工技术学报,2012,27(11):62-67. WANG Gaolin,YANG Rongfeng,LI Gang.Position sensorless control strategy of IPMSM based on high frequency signal injection[J].Transactions of China Electro Technical Society,2012,27(11):62-67.
[15] SHAO Jianwen,NOLAN D,TEISSIER M,et al.A novel micro controller-based sensorless brushless DC(BLDC) motor drive for automotive fuel pumps[J].IEEE Trans.on Industry Applications,2003,39(6):1734-1740.
[16] PASQUESOONE G,MIKAIL R,HUSAIN I.Position estimation at starting and lower speed in three-phase switched reluctance machines using pulse injection and two thresholds[J].IEEE Transactions on Industry Applications,vol.47,No.9,pp.1724-1731,July,2011.
[17] 林明耀,刘文勇,周谷庆.无位置传感器无刷直流电机短时脉冲定位加速方法[J].电机与控制学报,2011,26(09):80-86. LIN Mingyao,LIU Wenyong,ZHOU Guqing.A location and acceleration method of sensorless brushless DC motor Utilizing Short Voltage Pulse.Electiric Machines and Control,2011,26(09):80-86.
[18] 付敏,陈洋.U型单相永磁同步电机振动及噪声的有限元分析[J].哈尔滨理工大学学报,2015,20(3):86 -90. FU Min,CHEN Yang.The vibration and noise finite elementanalysisi of U type single phase permanent magnet synchronous motor[J].Journal of Harbin University of Science and Technology,2015,20(3):86-90.
[19] JANG J H,SUL S K,HA J L.Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency,IEEE Transactions on Industry Applications,vol.39,no.4,pp.1031-1038,Mar.2003.
[20] YUAN L,XIAO F,SHEN J Q,et al.Sensorless control of high-power interior permanent magnet synchronous motor drives at very low speed,IET Electr.Power Appl.,2013,7,(3),pp.199-206.
(编辑:贾志超)
Sensorless full speed range control strategy of high-speed maglev brushless DC motor
CHEN Shao-hua1,2,3, LIU Gang1,2,3, ZHENG Shi-qiang1,2,3, GUO Jin-chao1,2,3
(1.School of Instrumentation Science and Optoelectronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China;2.Beijing Engineering Research Center of High-Speed Magnetically Suspend Motor Technology and Application,Beijing 100191,China; 3.University of Aeronautics and Astronautics,Beijing 100191,China)
This paper focuses on start-up strategy of high-speed maglev brushless DC Motor,and the accurate expressions of voltage and flux linkage have been obtained,and the functional equation of rotor position and motor flux linkage have been pointed out.The reason of the rotor position being difficult to be tested in the low speed of the high speed maglev brushless DC motor has been analyzed.A G function method of high speed maglev brushless DC motor has been proposed.This method took the equivalent phase current of non-commutation phase amplitude as the target and takes the phase current difference of non-commutation phase before and after the commutation as feedback amount,and corrected the commutation signals automatically through G function threshold by PI regulator.Experimental results show that the proposed sensorless full speed range control strategy can ensure the full speed range of 20 000 r/min.
maglev blower; brushless DC motor; sensorless; G function; closed-loop correction
2016-02-18
国家自然科学基金(61374029);国家自然科学基金(61403015)
陈少华(1985—),男,博士研究生,研究方向为高速大功率永磁电机控制; 刘 刚(1970—),男,教授,博士生导师,研究方向为航天器姿态控制技术、精密机电控制系统; 郑世强(1981—),男,副教授,研究方向为航天器用磁悬浮惯性执行机构、高速磁悬浮电机技术; 郭金超(1990—),男,硕士研究生,研究方向为高速大功率永磁电机控制。
陈少华
10.15938/j.emc.2017.04.015
TP 273
A
1007-449X(2017)04-0105-10
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
新型工业化(2021年8期)2021-10-23
电子与封装(2021年7期)2021-07-29
小学科学(学生版)(2021年4期)2021-07-23
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
电测与仪表(2014年21期)2014-04-04
微特电机(2012年10期)2012-10-31
