超空泡航行体控制面与主空泡相互作用分析
2017-06-08 01:33周后村向敏张为华
兵工学报 2017年5期
周后村, 向敏, 张为华
(国防科学技术大学 航天科学与工程学院, 湖南 长沙 410073)
超空泡航行体控制面与主空泡相互作用分析
周后村, 向敏, 张为华
(国防科学技术大学 航天科学与工程学院, 湖南 长沙 410073)
基于有限体积法,采用均相流模型和流体体积方法开展超空泡航行体在不同空泡流型及不同控制面舵角情况下空化流场数值模拟,研究穿刺空泡情况下超空泡航行体尾部控制面与航行体主空泡之间的相互作用。数值模拟结果表明:航行体主空泡对控制面的影响表现为不同流型下控制面沾湿深度不同,沾湿深度变化量最大可达50%以上,控制面流体动力受沾湿深度影响明显;航行体尾部控制面对主空泡闭合有迟滞作用,主空泡长度平均增量约为3%,控制面存在舵角时将会引起控制面之后的航行体主空泡形态变化,可引起航行体出现不对称沾湿面,且尾部闭合流型受影响最大。因此,超空泡航行体空泡流型设计与控制律设计时应充分考虑控制面与航行体主空泡之间的相互作用。
流体力学; 超空泡航行体; 空泡流型; 控制面; 空泡; 相互作用
0 引言
超空泡技术是目前水下减阻最有效的方法之一。经实验证实,超空泡技术减阻量高达90%,可实现水下航行体千米每秒的运动速度[1]。俄罗斯、美国等欧美国家基于超空泡减阻技术开展大量超空泡武器及概念方案研究,如俄罗斯“暴风雪”号超空泡鱼雷[2]、美国机载快速灭雷系统“RAMICS”[3]等。但由于技术限制,目前超空泡航行体机动性较弱,严重制约了超空泡航行体的发展。配置尾部控制面,利用控制面舵角产生控制力是实现超空泡航行体机动控制的方式之一。水下航行体高速运动时,其控制面也必然产生空化现象,特别是控制面操舵情况下,控制面周围也将形成空泡。控制面流体动力建模是控制面维持航行体稳定航行和调整航行体姿态的基础。在超空泡航行及操舵过程中,控制面空泡与航行体主空泡之间相互作用,从而对航行体及控制面受力产生较大影响。因此,研究超空泡航行体控制面与航行体主体空泡之间的相互作用具有重要的意义。
目前有学者对超空泡航行体控制面空泡形态、水动力特性及其与主体空泡相互作用开展了相关实验及数值研究。杨洪澜等[4]、张治勇等[5]对楔形体自然空化问题进行了数值模拟,得到了楔形体在不同流动工况下空泡形态变化规律。裴譞等[6-7]利用高速水洞对超空泡航行体缩比模型开展了通气超空泡生成和力学特性、尾翼舵效分析实验,研究了尾翼安装与否及其位置、尾翼后掠角对模型超空泡形态及水动力特性的影响。邢彦江等[8]通过水洞实验研究了有无尾翼及尾翼楔角对通气超空泡航行体流体动力的影响规律。张木等[9]、熊天红等[10]基于压力隐式算子分裂(PISO)算法和流体体积(VOF)方法对带尾翼超空泡射弹进行了三维非定常数值模拟研究,分析了空化数及尾翼结构对超空泡形态特性的影响。周清强[11]研究了直航状态下尾翼对航行体通气超空泡发展的影响,并采用动网格技术对尾翼偏转过程中尾翼舵效、航行体流体动力及其姿态稳定性进行了研究。张宇文等[12]研究了通气空泡情况下模型攻角对尾翼超空泡形态的影响、尾部位置力的特性及其形成机理。在超空泡航行体控制研究方面,Kirschner等[13]基于Munzer-Reichardt空泡模型建立航行体主空泡近似外形,主空泡与控制面之间的相互作用采用浸湿深度与控制面后掠角进行近似建模,研究了超空泡航行体控制策略问题。Goel[14]、Vanek[15]考虑时间延迟对空泡形态的影响,采用Logvinovich空泡模型对主空泡形态进行建模,并基于计算流体力学(CFD)方法对控制面进行流体动力建模,在考虑主空泡与控制面相互作用时采用浸湿深度、攻角及控制面后掠角进行控制面流体动力插值计算。国内林明东[16]、王雨[17]、王志学[18]、Zou等[19]也进行了类似研究工作。Escobar等[20-22]基于水洞实验研究了空化器作用下航行体力学特性及主空泡形态的变化规律和主空泡对控制面受力的影响。但当前研究主空泡与控制面之间的相互作用主要基于经验模型,控制面对主空泡形态的影响考虑不足,目前超空泡航行体存在舵角时航行体控制面与主空泡之间的相互作用研究还十分缺乏。
本文以“+”型尾部控制面布局超空泡航行体为研究对象,开展超空泡航行体自然空化流场数值模拟,研究不同空泡流型和舵偏角情况下控制面与主空泡之间的相互作用,为超空泡航行体总体设计提供支撑。
1 超空泡航行体外形及空泡流型设计
1.1 航行体流体外形设计
对于由圆盘空化器、圆锥空化器生成的超空泡,其外形为一个近似回转椭球体,为最大限度减小航行体阻力,理想航行体外形应与空泡外形相似并略小于空泡[23],如图1所示。

图1 理想超空泡航行体外形示意图Fig.1 Ideal configuration of SCV
本文考虑实际工程中由于受到载具、载荷及加工等方面因素的限制,将超空泡航行体设计成两头小、中间粗的3段式轴对称回转体,如图2所示。
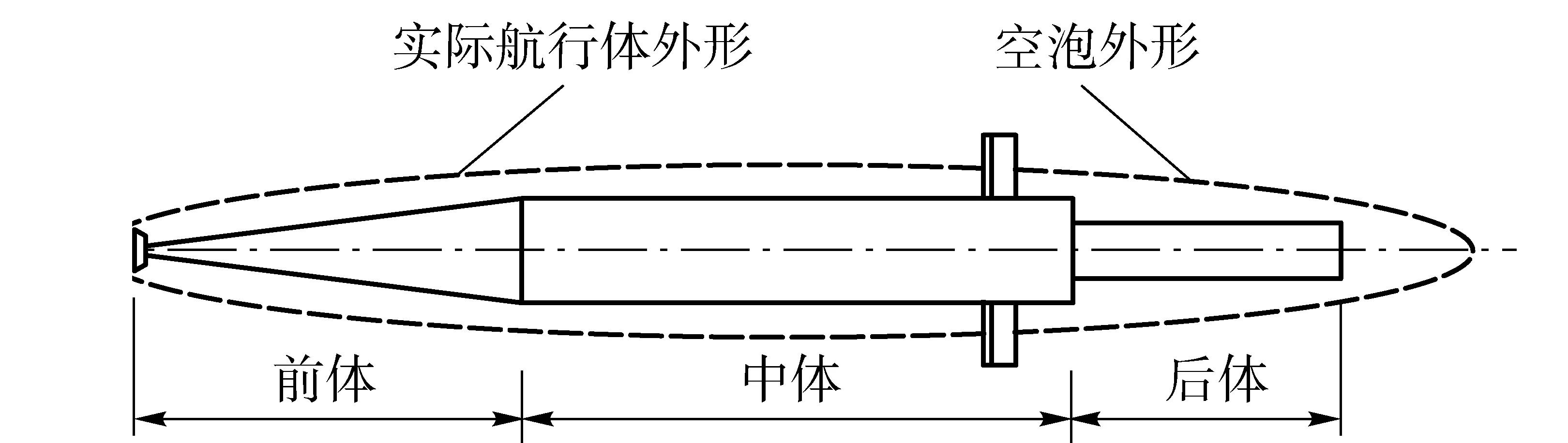
图2 实际超空泡航行体外形示意图Fig.2 Real configuration of SCV
为实现超空泡航行体机动控制,在尾部布置“+”型布局控制面,如图3所示,其中舵2、舵4代表水平控制舵。控制面翼型采用具有较高升阻比的组合空化翼型[24]。
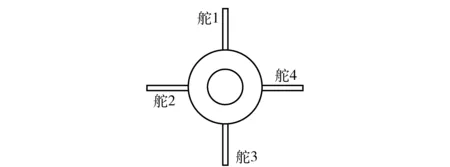
图3 尾部控制面布局形式Fig.3 Cruciform layout of control surfaces
1.2 空泡流型设计
利用超空泡减阻原理可实现水下航行体高速航行,但同时由于空泡的包围,航行体失去全湿状态下浮力优势及外力作用点位于质心之前,航行体稳定性成为超空泡航行体设计阶段需要重点考虑的问题。航行体在超空泡条件下受力复杂,特别是尾部受力难以预测,力和力矩平衡较难实现。航行体稳定性与其生成的超空泡流型相关,根据超空泡闭合点相对于航行体的位置,可分为3种较为稳定的空泡流型。
1.2.1 局部空泡流型
当航行体航行速度相对较低时,航行体头部形成局部空泡,同时航行体尾部也形成较小尺度的尾空泡,如图4所示,图中Fh、Ft分别为航行体头部和尾部所受流体动力,G为航行体重力。由于存在两个空泡,该流型也称为双空泡流型。该流型模式下,航行体尾部包含大量沾湿面积,流体动力作用点靠后,航行体静稳定。该流型由于包含大量沾湿面,航行体阻力较大。
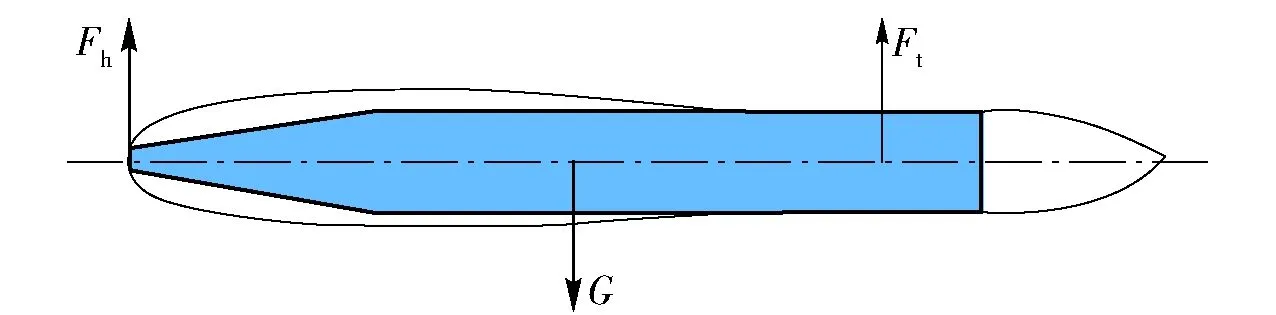
图4 局部空泡流型示意图Fig.4 Schematic diagram of a partial closure cavity flow pattern
1.2.2 尾部闭合空泡流型
尾部闭合空泡流型下超空泡尺度与航行体尺度相当,空泡在航行体尾部及其附近闭合,如图5所示。该流型下,航行体尾部下表面仍可提供一定升力,与头部空化器共同平衡重力及力矩。由于空泡尾部常伴随空泡破碎、回射流等现象,对尾部控制面流体动力特性具有较大影响。
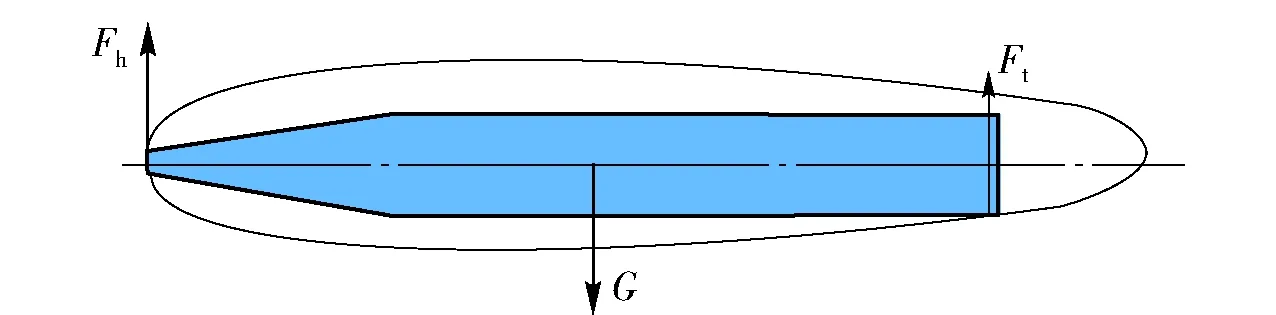
图5 尾部闭合空泡流型示意图Fig.5 Schematic diagram of a base closure cavity flow pattern
1.2.3 自由闭合空泡流型
当航行体航行速度较高时,空泡在航行体尾部远处闭合,航行体位于空泡主体区,空泡尾流对航行体影响较小,该流型也称开式空泡流型。该流型下航行体尾部在空泡内周期性振荡,在特定条件下可实现动态平衡,如图6所示。

图6 自由闭合空泡流型示意图Fig.6 Schematic diagram of an open cavity flow pattern
2 数学模型
本文采用流体力学计算软件ANSYS CFX,基于均相流模型对超空泡航行体自然空化流场进行数值模拟。将流场假设为由汽液两相构成的不可压混合流场,各相共享流场速度、压力,混合流场密度及粘性系数假设为体积分数的线性函数:
ρm=γρl+αρv,
(1)
μm=γμl+αμv,
(2)
式中:ρ、μ分别为密度及黏性系数;下标m、l及v分别代表混合介质、液相与汽相;γ、α分别为流场液相体积数及汽相体积分数,根据VOF法定义为
(3)
Vl为液相体积,Vv为汽相体积。
数值求解计算中,通过求解跟踪混合流场连续性方程、动量方程和体积分数输运方程等来模拟流场自由界面变化。
2.1 基本控制方程
空化流场满足质量、动量及相体积分数守恒。混合介质连续方程为
(4)
式中:u为混合流场速度;i为笛卡尔坐标方向。
忽略重力及表面张力项的影响,混合介质动量方程为
(5)
式中:p为混合流场压力;j为笛卡尔坐标方向。
流场液体体积分数输运方程定义为
(6)

2.2 湍流模型
空化流场特别是空泡闭合区域充满了蒸汽、液滴与涡旋,是非定常、非稳定的多相湍流区。在数值模拟中必须考虑湍流的影响。本文采用标准k-ε湍流模型对空化流场进行求解,湍动能k及耗散率ε输运方程为
(7)
(8)
式中:μt为湍流黏性系数;pk为湍流生成项;C1ε、C2ε、σk、σε为经验常数。
湍流黏性系数μt根据流场湍动能k及耗散率ε计算:
(9)
式中:Cμ为经验常数。则(5)式混合介质黏性系数μm由有效黏性系数μe替代:
μe=μm+μt.
(10)
模型方程中Cμ等常数取值如表1所示。

表1 标准k-ε湍流模型系数Tab.1 Closure coefficients for k-ε turbulence modelling
2.3 空化模型

(11)
式中:流场中气核半径RB=10-6m;不可凝气体体积分数αn=5×10-4;汽化及液化过程模型常数分别为Fv=50,Fc=0.01.
3 数值计算
3.1 几何模型及网格划分
为了研究尾部控制面对航行体主空泡的影响,本文计算模型采用图3所示“+”型尾部控制面布局及无尾部控制面布局形式航行体。计算模型外形尺寸参考文献[20]。计算域示意图如图7所示,不考虑侧向运动,采用直径为60倍弹径的1/2圆柱形区域为计算域,其中计算域入口距超空泡航行体头部50倍弹长,下游出口距航行体头部100倍弹长。
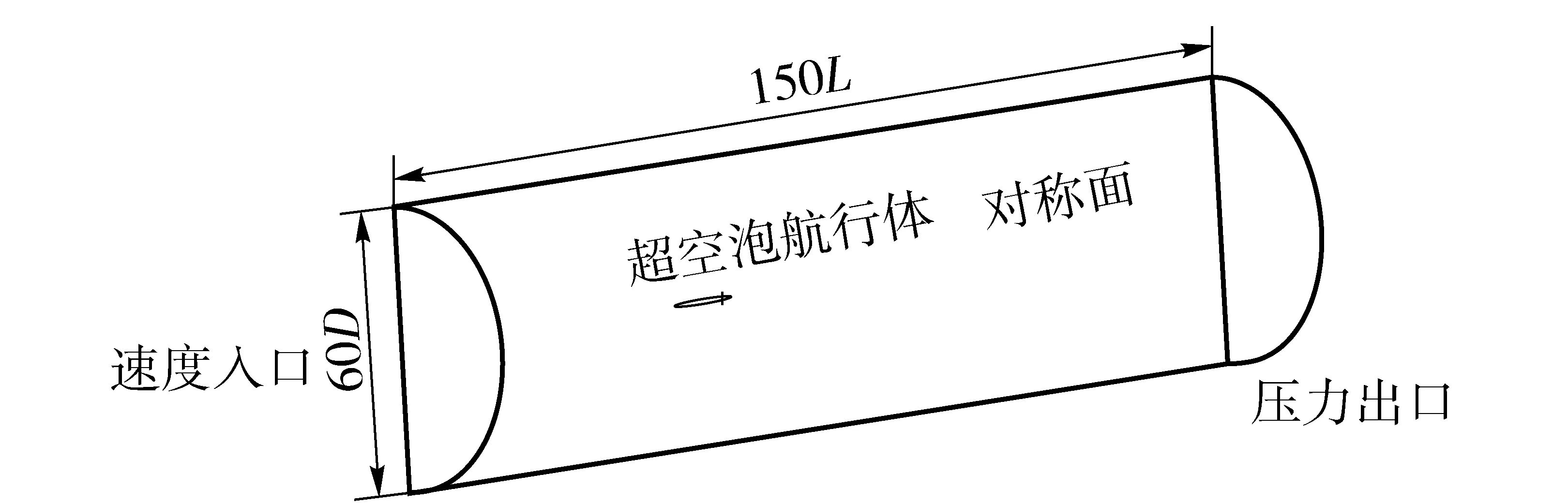
图7 计算域及边界条件设置示意图Fig.7 Computing domain and boundary conditions
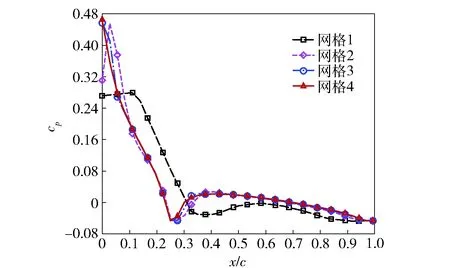
图8 不同网格控制面压力系数分布Fig.8 Pressure coefficient distribution under different meshes
航行体近壁面及控制面附近网格数量及质量对数值计算影响较大,需进行加密处理。本文采用4种不同疏密程度的网格进行网格无关性检验,舵2迎流面压力系数Cp沿弦长相对位置x/c分布如图8所示,c为弦长。随着网格密度增加,控制面压力分布趋于一致,综合考虑本文中取网格3作为数值计算网格,如图9所示。
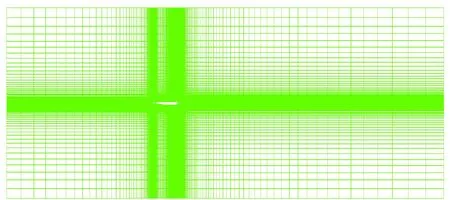
图9 对称面网格示意图Fig.9 Computing mesh on the symmetry plane
3.2 边界条件设置
如图7所示,来流及出口边界分布采用速度入口、压力出口边界条件,对称面采用对称边界,航行体壁面采用无滑移壁面边界条件,远场边界采用滑移边界。假设超空泡航行体航行深度为水下5 m,对应的环境压力约为p∞=150 000 Pa. 在压力出口处指定压力值为环境压力p∞,速度入口指定来流速度v∞,其值根据(12)式空化数σ计算得到,入口液相体积分数γ=1,汽相体积分数α=0.
(12)
本文对超空泡航行体不同空泡流型下控制面与主空泡相互作用进行数值计算分析。以航行体主空泡闭合于航行体表面位置为分类依据,其中局部空泡流型选取空泡闭合与尾部控制面之前,航行体存在较大全沾湿面;尾部闭合模型为本文重点研究流型,选取主空泡闭合于控制面与尾喷管之间3种不同位置;自由闭合流型则选取主空泡闭合于尾喷管之后较远位置。各工况下分别计算3个控制面舵角状态下流场空泡形态及航行体流体动力特性,研究控制面与主空泡相互关系。各工况对应的流场空化数如表2所示。
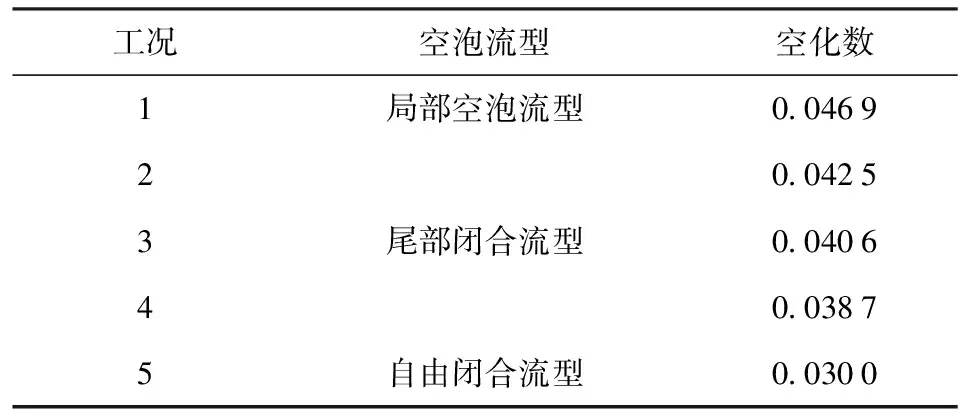
表2 流场空化数Tab.2 Cavitation number
3.3 数值计算方法
本文基于ANSYS CFX软件对超空泡航行体空化流场开展定常数值模拟。采用高精度差分格式对控制方程中对流项进行离散,该差分格式可通过调整混合因子提高计算精度。扩散项采用2阶中心差分格式进行离散,时间项采用2阶后向差分格式离散。为精确追踪空泡界面,采用可压格式对相体积分数方程的对流项进行离散。压力- 速度耦合采用Rhie & Chow方法,并采用全隐式多重网格法对动量方程和压力- 速度方程组成的方程组进行迭代求解。计算中首先进行单相计算,待单相流场收敛后加载空化模型再进行多相计算,直至流场最终收敛。
4 计算结果与分析
在大多数情况下,超空泡航行体尾部控制面需要穿刺空泡界面,获得控制力和力矩,由此导致尾部控制面与航行体主空泡的相互作用。穿刺空泡情况下尾部控制面水动力特性及控制面与航行体主空泡的相互作用对航行体流体动力具有重要影响。本文研究“+”型尾部控制面布局超空泡航行体不同空泡流型下尾部控制面与主空泡的相互作用,并以无尾布局航行体为对照,数值计算中以尾部水平控制面舵2为例,研究控制面存在舵角时主空泡与控制面之间的相互作用。在尾喷管区域选取距航行体头部轴向相对距离分别为0.9L及0.95L的两个横截面,如图10所示,并在两截面上绘制流场汽相体积分数分布云图,研究尾部控制面后空泡形态。
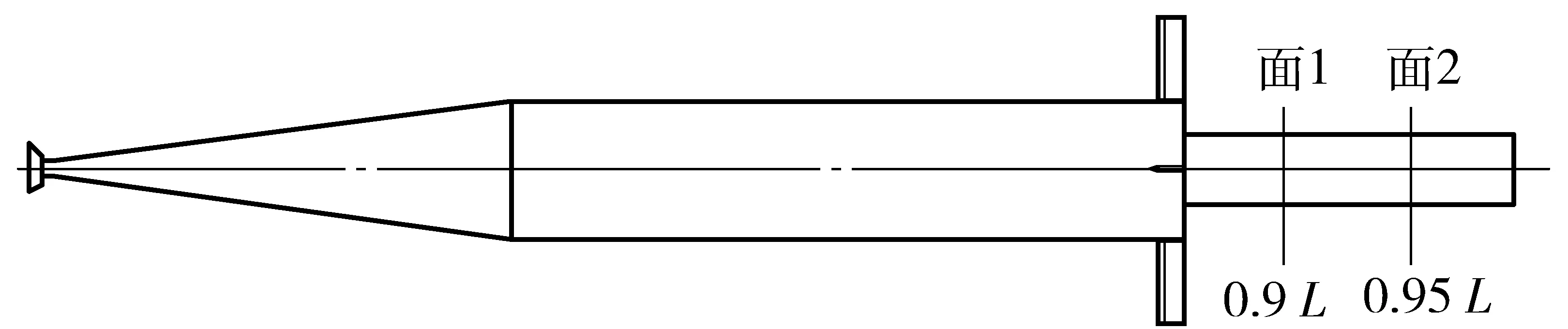
图10 横截面位置示意图Fig.10 Location of two cutting planes
4.1 流场参数分布
本小节以工况3为例,分析流场参数分布合理性。流场对称面控制面附近流场参数如图11所示,其中图11(a)为对称面控制面附近局部压力分布。由压力分布可知,尾部空泡闭合区为局部高压区,控制面根部被主空泡包裹,包裹段压力较低,沾湿段控制面前缘为局部驻点次高压区。图11(b)图为流场液体速度矢量分布,空泡外部流场速度远高于空泡内部流场速度。图11(c)和图11(d)分别为水平控制面截面流场压力分布与航行体尾喷管后端区域流线分布图,其中尾喷管后端受回射流影响出现回流。当控制面存在舵角时,受控制面干扰,流场压力、速度及主空泡形态均发生不对称变化,航行体尾喷管出现不对称沾湿。图11(e)为液相体积分数为0.5的等值面,受控制面空泡影响,主空泡形态自控制面前缘发生形变,由近似椭球形变为台锥形,如图中红色实线标注所示,这一模拟结果与文献[25]实验观察结果一致。
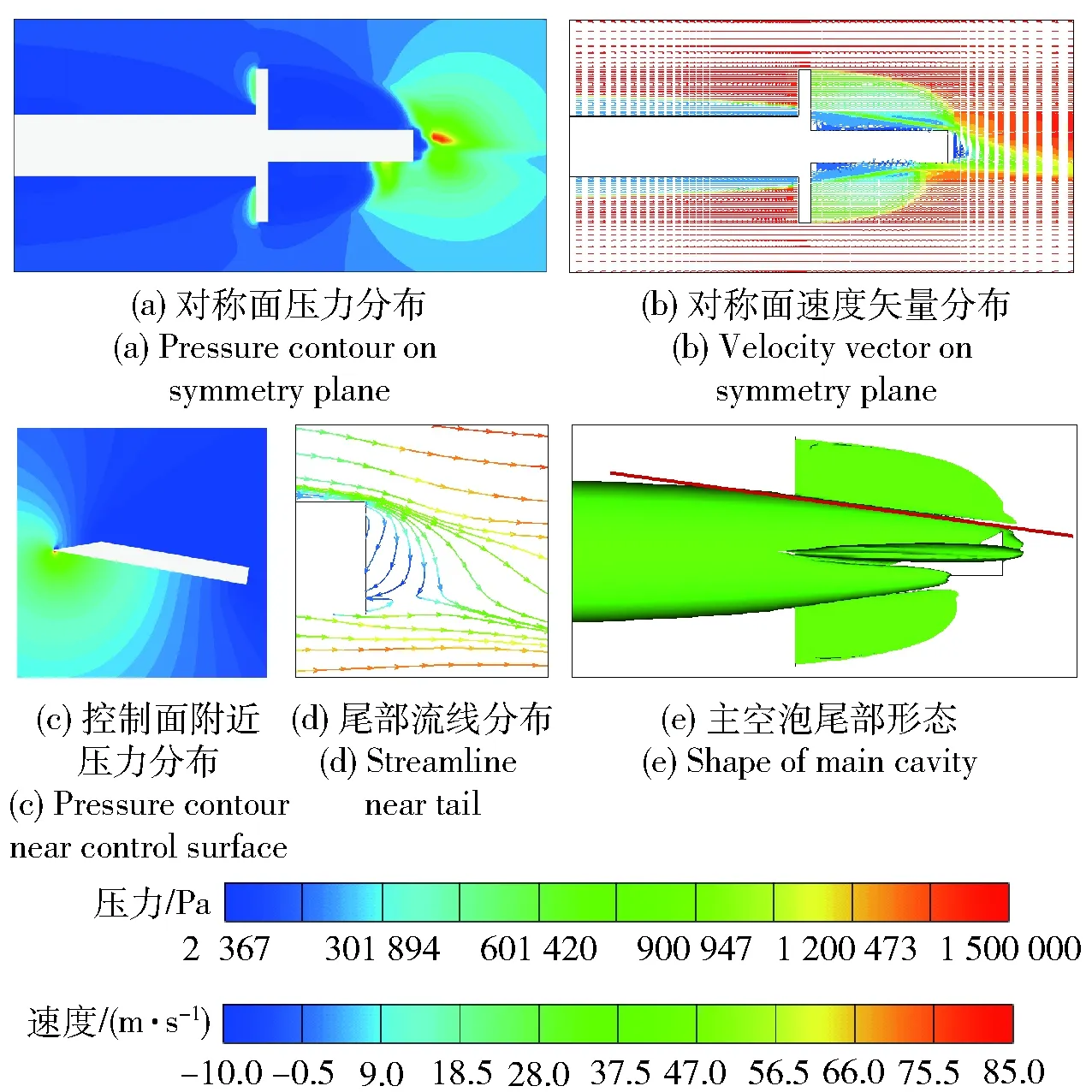
图11 流场参数分布Fig.11 Distribution of flow domain parameters
4.2 控制面对主空泡的影响
4.2.1 局部空泡流型
超空泡航行体不同舵角情况下对称面及尾喷管两截面流场汽相体积分数分布如图12所示,其中图12(a)为无尾布局航行体对称面汽相体积分数云图;图12(b)~图12(j)分别为“+”型布局航行体水平控制面舵角为δ2=0°、δ2=5°、δ2=10°时流场汽相体积分数云图,其中图12(b)、图12(e)和图12(h)为对称面汽相体积分数云图,图12(c)、图12(f)和图12(i)为面1汽相体积分数云图,图12(d)、图12(g)和图12(j)为面2汽相体积分数云图。
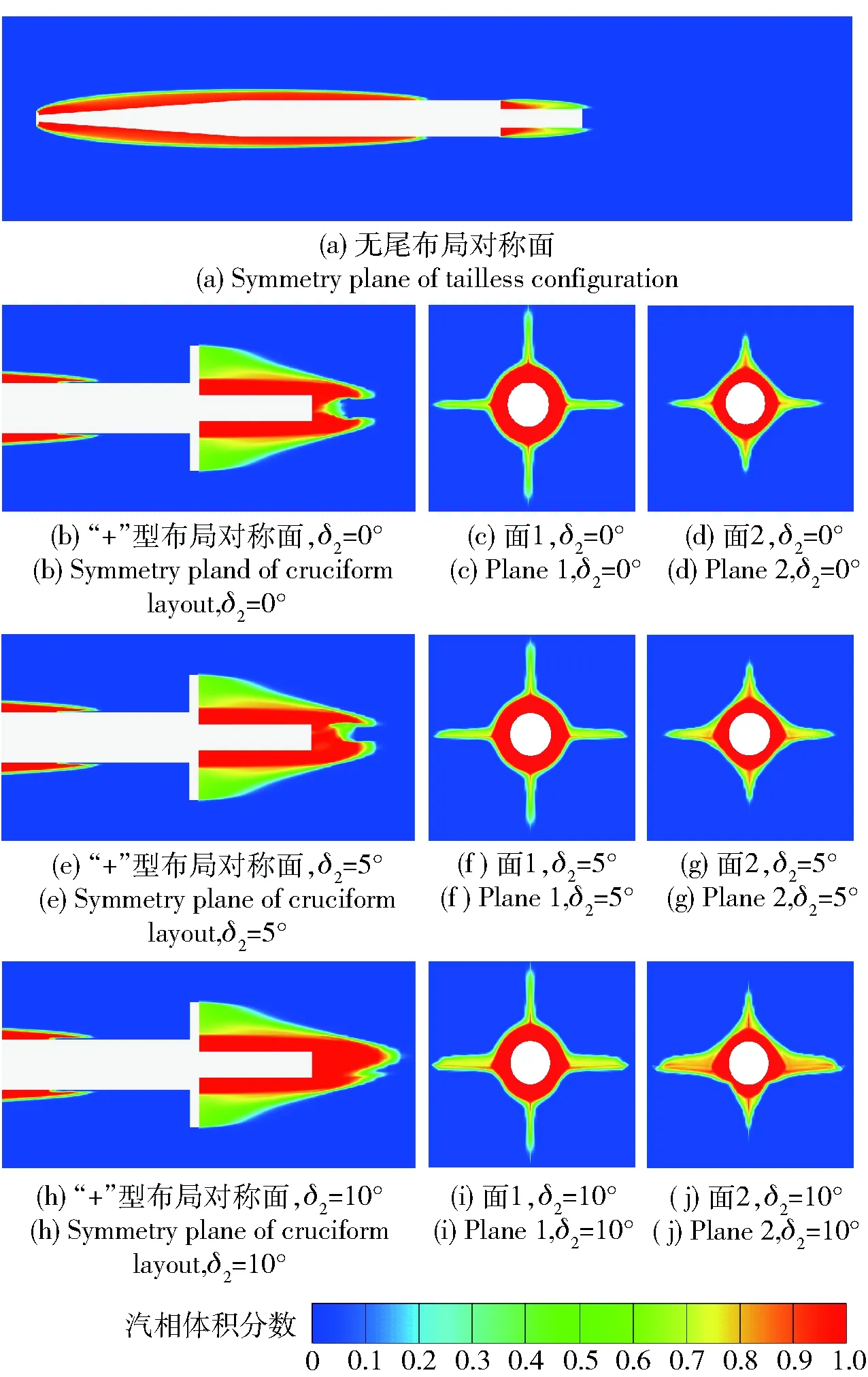
图12 流场汽相体积分数分布(工况1)Fig.12 Contour of volume fraction of vapor phase (Case 1)
局部空泡流型下航行体主空泡闭合于航行体圆柱段壁面,尾喷管台阶处形成较小尺度的独立空泡。相比无尾布局超空泡航行体,尾部控制面对其上游的主空泡无明显影响,空泡长度变化小于0.2%. 但控制面对其后尾喷管处空泡具有增强作用,使得空泡尺度增大,且控制面舵角越大作用越明显。零舵角下,受控制面空泡影响,尾部空泡闭合迟滞,空泡长度增大约8.0%. 当水平控制面存在舵角时,迎流一侧空泡受压变形,空泡上下不对称,但尾喷管壁面仍处于空泡包裹中,受影响较小。
4.2.2 尾部闭合空泡流型
如表2所示,本文针对尾部闭合空泡流型选取了3种不同空泡闭合位置进行数值计算,即空泡闭合位置分别为尾喷管台阶处、尾喷管底部以前、尾喷管底部之后。该空泡流型情况下超空泡航行体水平控制面舵角分别为δ2=0°、δ2=5°、δ2=10°时,对称面及尾喷管横截面流场汽相体积分数分布如图13~图15所示。
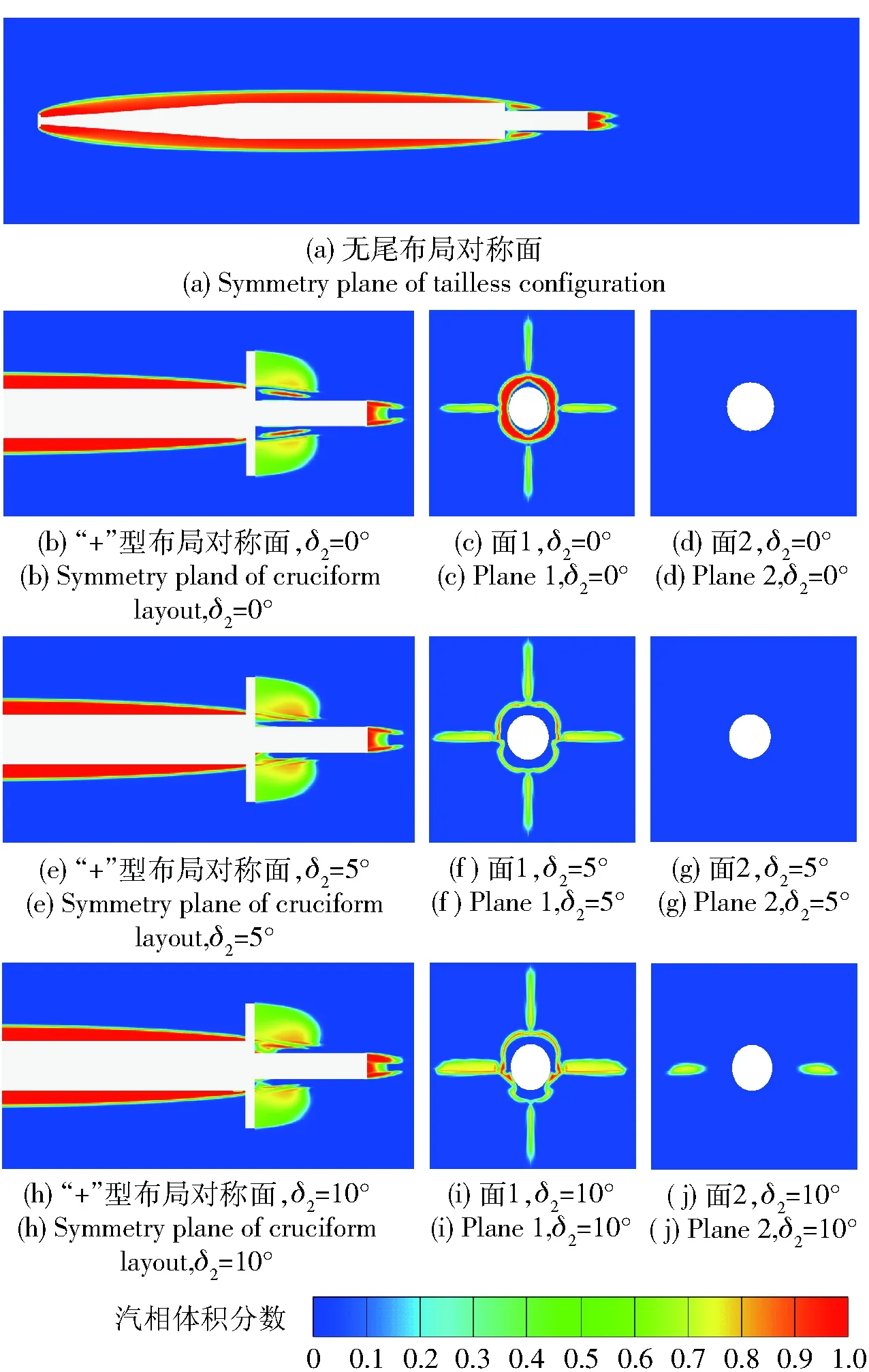
图13 流场汽相体积分数分布(工况2)Fig.13 Contour of volume fraction of vapor phase (Case 2)
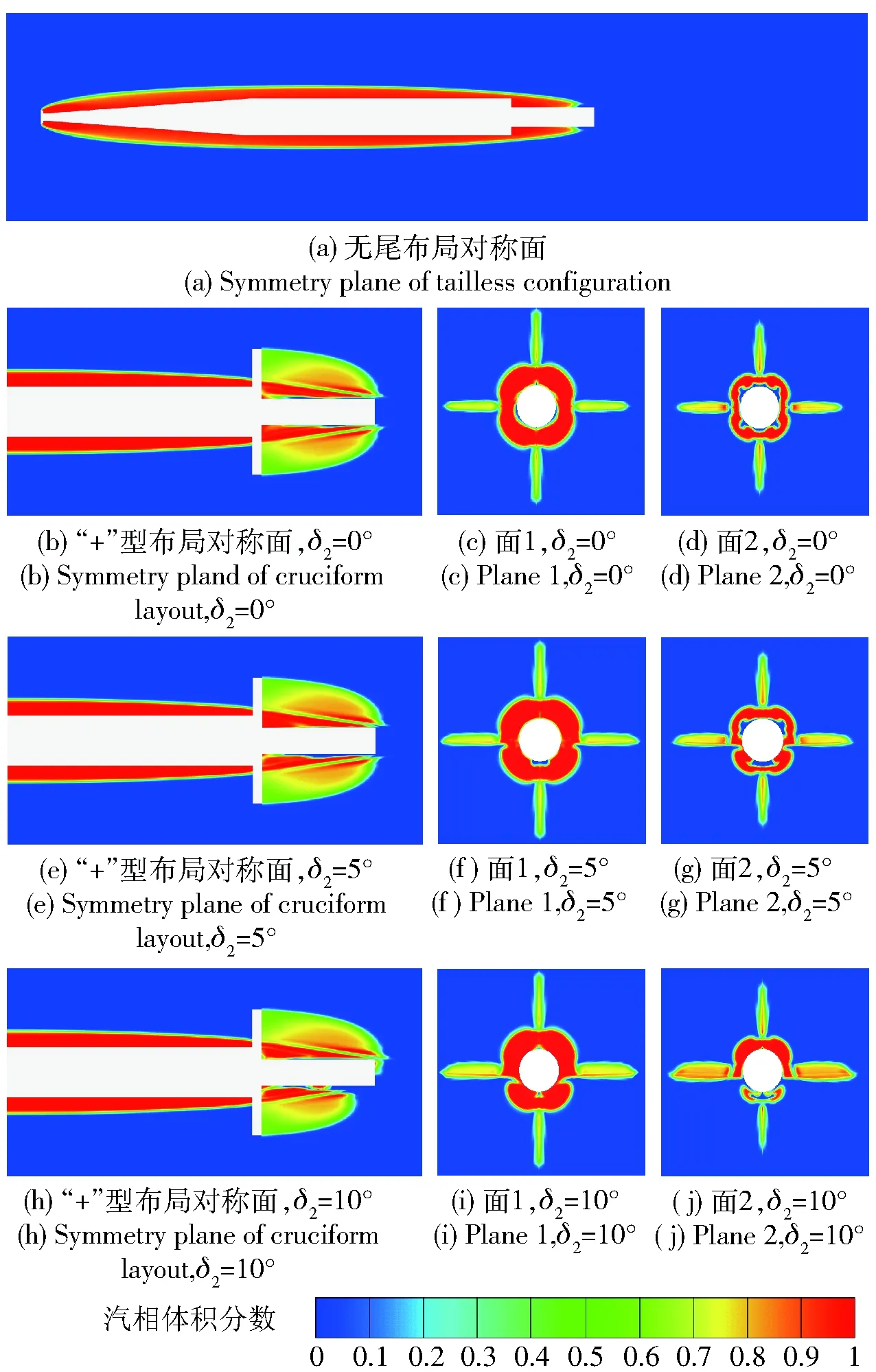
图14 流场汽相体积分数分布(工况3)Fig.14 Contour of volume fraction of vapor phase (Case 3)
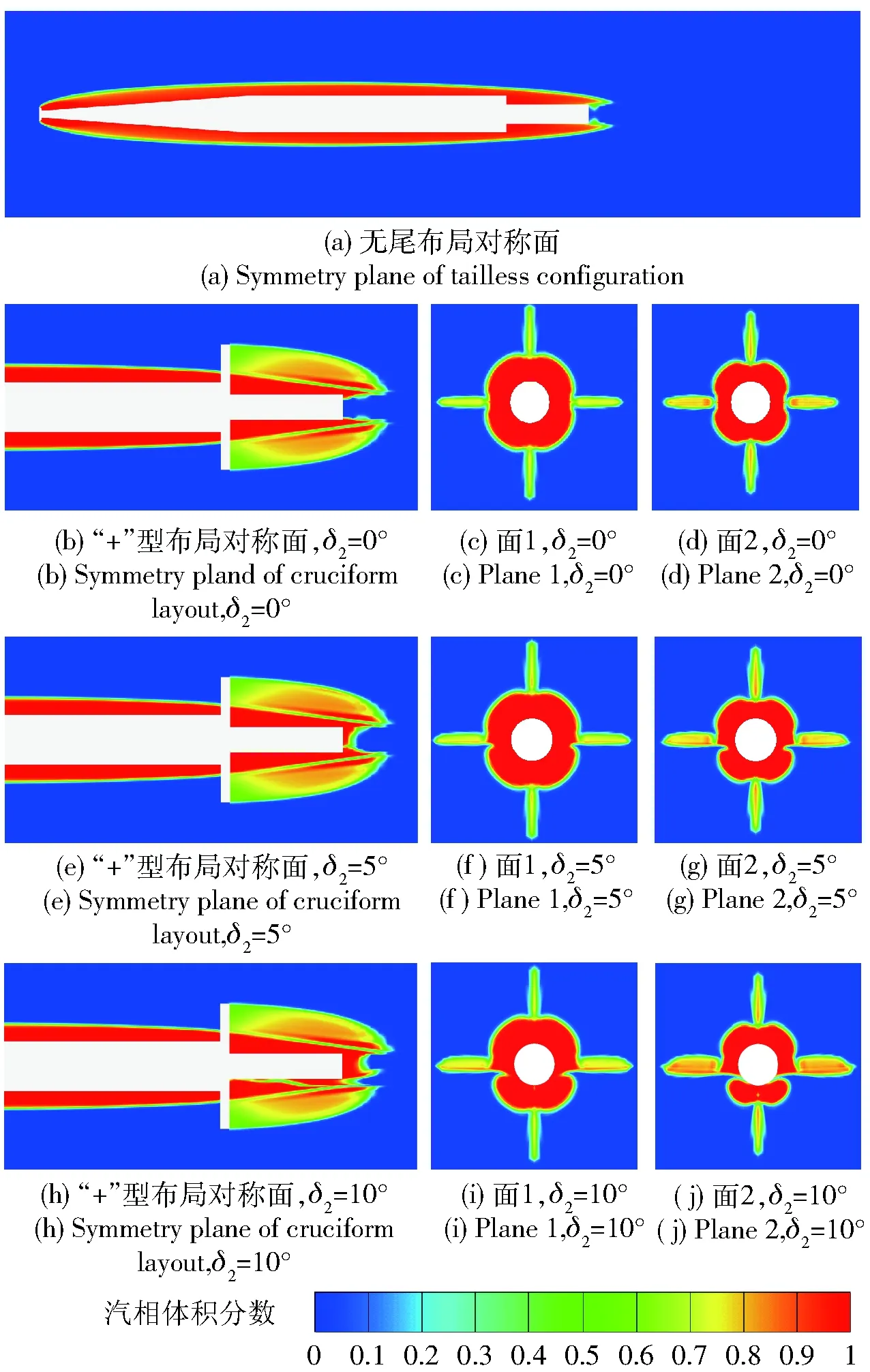
图15 流场汽相体积分数分布(工况4)Fig.15 Contour of volume fraction of vapor phase (Case 4)
根据计算结果,工况2由于空泡尺度较小,尾喷管附近空泡与壁面距离较小,尾部控制面对主空泡形态有较大影响。水平控制面舵角为0°时,由于控制面表面压力较大,主空泡向内凹陷,但形变较小,各截面空泡形态对称。工况3同工况2相似,由于主空泡尺度相对较小,尾喷管表面包含不同程度的沾湿面,考虑到空泡的非定常发展,沾湿面的变化将导致航行体流体动力的变化,不利于航行体姿态稳定。该流型下,工况2~工况4主空泡长度增量分别为1.6%、3.1%、1.9%.当航行体尾部水平控制面舵角增大时,位于控制面之后的主空泡迎流一侧受压明显,空泡向内凹陷,当舵角进一步增大时,主空泡变形较为严重,尾喷管壁面出现不对称沾湿。
4.2.3 自由闭合空泡流型
自由闭合空泡流型数值计算结果如图16所示。对于自由闭合空泡流型,由于尾喷管附近主空泡尺度较大,控制面沾湿深度较小,控制面对主空泡影响有限,零舵角情况下主空泡长度增量约为0.7%. 当水平控制面存在舵角时,虽然主空泡受压发生形变,但其形变程度相对于尾部空泡较小,航行体壁面力学特性受主空泡形态变化影响较小。

图16 流场汽相体积分数分布(工况5)Fig.16 Contour of volume fraction of vapor phase (Case 5)
4.3 主空泡对控制面水动力特性的影响
超空泡航行体控制面流体动力参数随空化数变化分别如图17~图22所示。
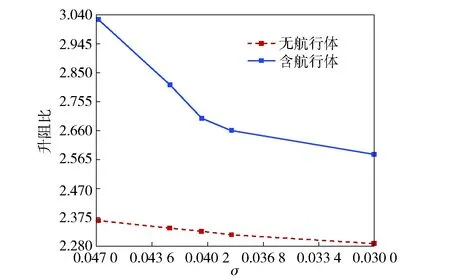
图17 控制面升阻比随空化数变化关系(δ2=5°)Fig.17 Relationship between lift-to-drag ratio of control surface and cavitation number (δ2=5°)

图18 控制面沾湿深度随空化数变化关系(δ2=5°)Fig.18 Relationship between submersion length of control surfaces and cavitation number (δ2=5°)
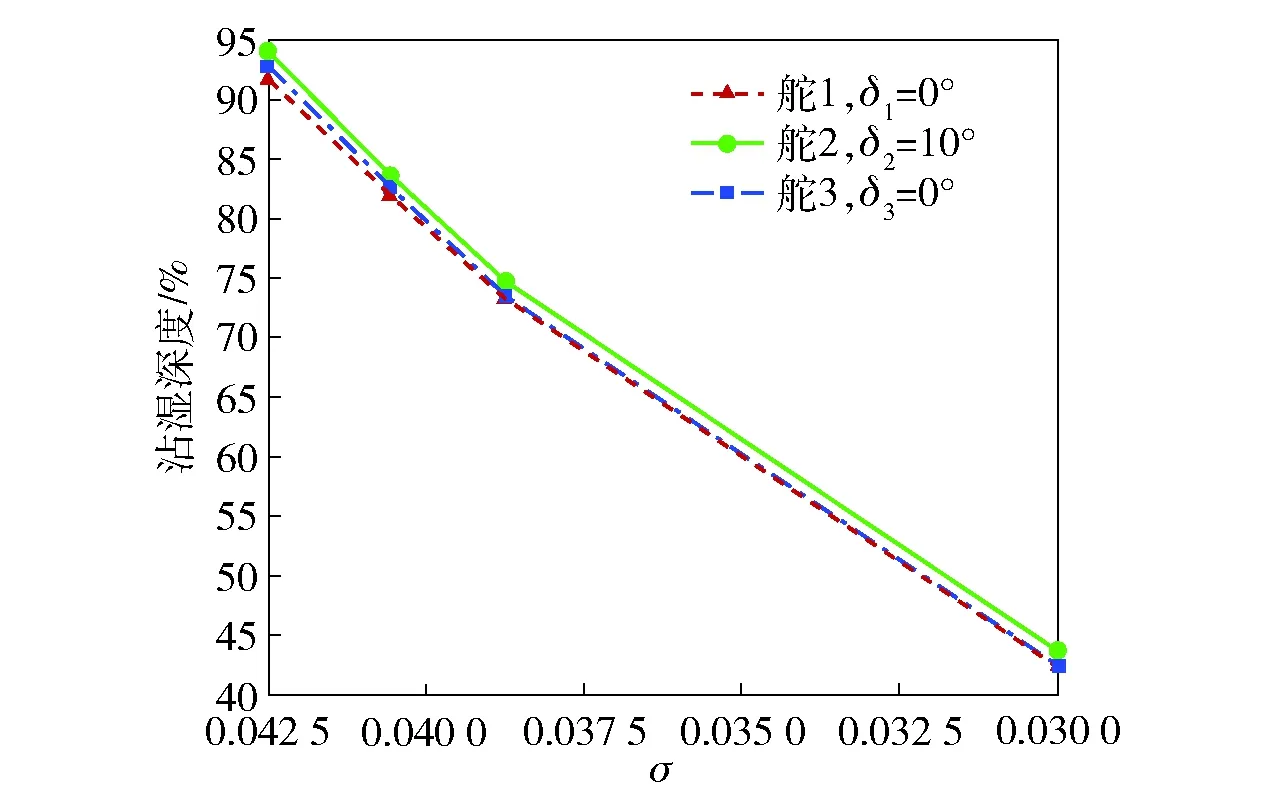
图19 控制面沾湿深度随空化数变化关系(δ2=10°)Fig.19 Relationship between submersion length of control surfaces and cavitation number (δ2=10°)
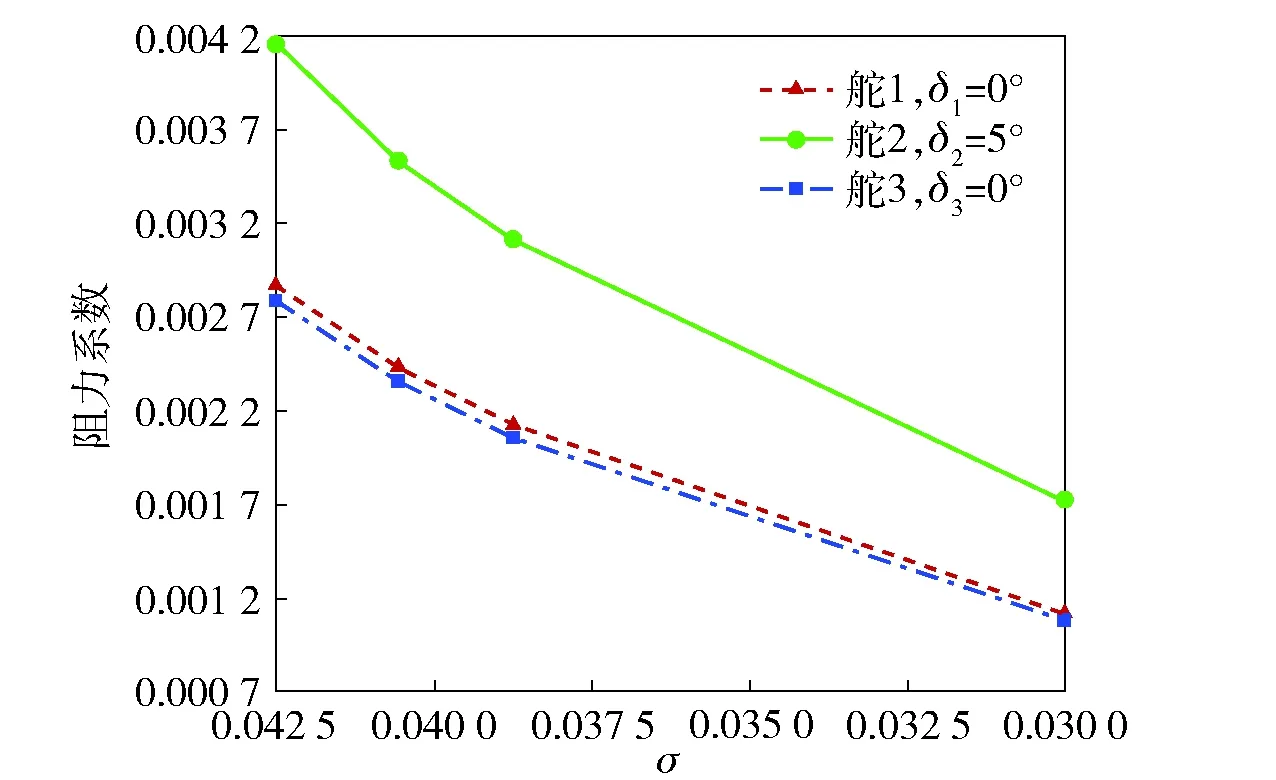
图20 控制面阻力系数随空化数变化关系(δ2=5°)Fig.20 Relationship between drag coefficient of control surfaces and cavitation number (δ2=5°)
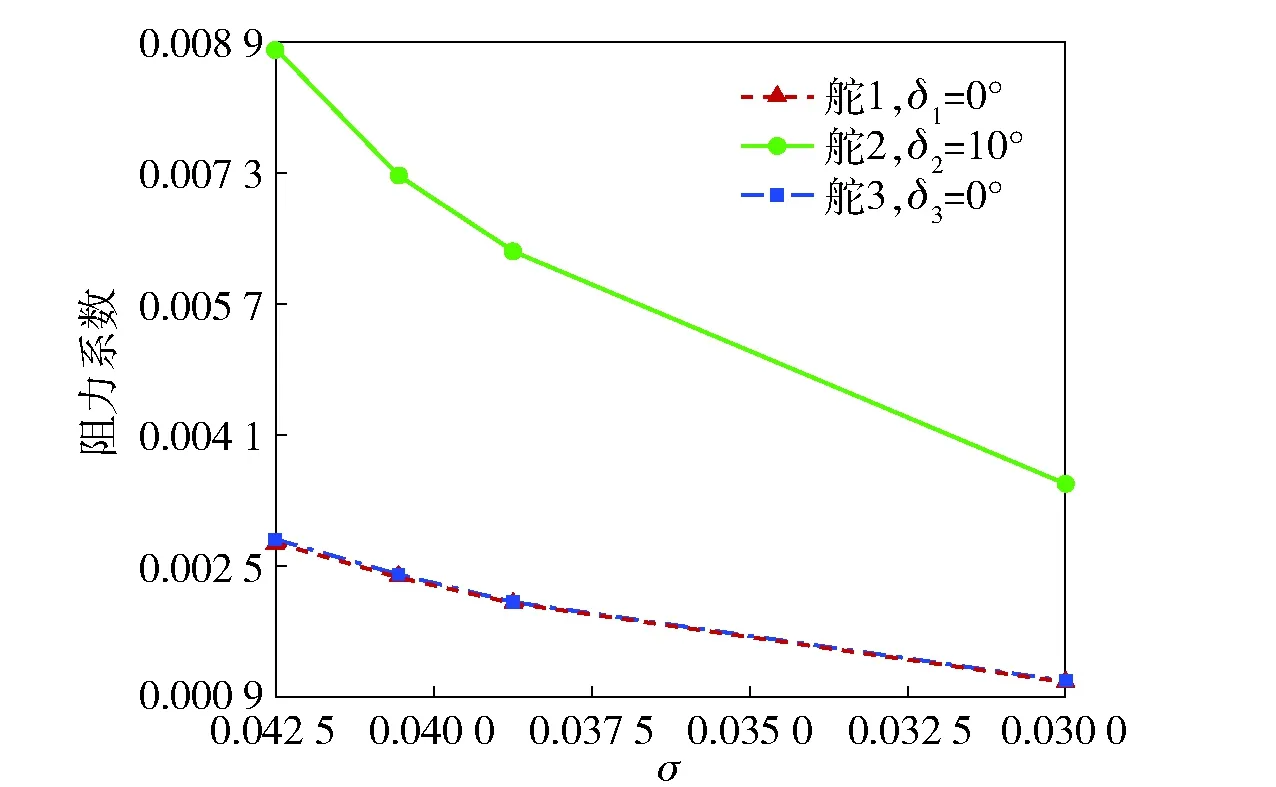
图21 控制面阻力系数随空化数变化关系(δ2=10°)Fig.21 Relationship between drag coefficient of control surfaces and cavitation number (δ2=10°)
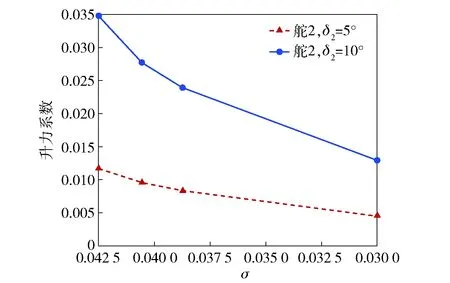
图22 控制面升力系数随空化数变化关系Fig.22 Relationship between lift coefficient of control surfaces and cavitation number
如图17所示,以水平控制面5°舵角为例,控制面在无航行体情况下控制面升阻比随空化数降低小幅降低,幅度小于4%. 当存在航行体且无主空泡包裹时,控制面升阻比较无航行体情况增大约28%,随着空化数降低,受航行体主空泡影响,翼型沾湿深度减小,升阻比随之大幅降低,最大变化量为15%. 根据图18~图22数值模拟结果可知,空化数相同时,航行体主空泡尺度相同,控制面零舵角下沾湿深度相同。当水平控制面存在舵角时,在迎流面压力作用下主空泡横截面向内凹陷发生形变,水平控制面沾湿深度小幅增大。不同舵角情况下,控制面升阻力系数变化趋势与控制面沾湿深度随空化数变化趋势一致。因此,航行体主空泡对控制面的影响主要表现为通过沾湿深度影响控制面升阻力系数。
5 结论
本文针对“+”型尾部控制面布局超空泡航行体进行了空化过程数值模拟。研究了不同空泡流型、水平控制面不同舵角情况下航行体尾部控制面与航行体主空泡之间的相互作用,得到结论如下:
1)尾部控制面对其上游空泡形态无明显影响,零舵偏情况下,由于尾部控制面空泡的作用,等同于增大尾部主空泡直径,对其后空泡闭合具有迟滞作用,空泡长度存在小幅度增长,平均增量约为3%.
2)对于尾部闭合空泡流型,在控制面操舵情况下,航行体主空泡发生较大变形,航行体尾喷管出现不同程度的沾湿,将对航行体受力及稳定性造成较大影响。对于本文航行体,其加速过程中将形成尾部闭合空泡流型,该阶段控制律设计时应充分考虑控制面舵角对航行体主空泡形态的影响。此外,对于设计流型为尾部闭合模型的超空泡航行体,其控制律设计也应考虑控制面与主空泡的相互作用。
3)不同流型下,航行体尾部控制面沾湿深度主要受主空泡尺度影响。随着空化数降低,控制面升阻力系数与沾湿深度均降低,且二者变化趋势一致。
References)
[1] Kuklinski R, Henoch C, Castano J. Experimental study of ventilated cavities on dynamic test model[C]∥Proceedings of the 4th International Symposium on Cavitation. Pasadena, CA, US: California Institute of Technology, 2001.
[2] 刘淮, 韩雪松, 雷贺攻. 国外高速水下武器技术发展现状及趋势研究[R]. 北京:中国船舶工业综合技术经济研究院, 2008. LIU Huai, HAN Xue-song, LEI He-gong. Research on current status and trends of high speed undersea weapon technology on the world[R]. Beijing: China Institute of Marine Technology & Economy, 2008.(in Chinese)
[3] 刘喜莹, 张庆明. 超空泡技术研究进展[C]∥中国力学学会学术大会2005论文摘要集. 北京:北京工业大学, 2005. LIU Xi-ying, ZHANG Qing-ming. Recent research and development in supercavitating technology[C]∥Proceedings of Chinese Conference of Theoretical and Applied Mechanics 2005. Beijing: Beijing University of Chemical Technology, 2005.(in Chinese)
[4] 杨洪澜, 张嘉钟, 赵存宝, 等. 楔体外部超空泡形状预测[J]. 哈尔滨理工大学学报, 2006, 11(4):106-110. YANG Hong-lan, ZHANG Jia-zhong, ZHAO Cun-bao, et al. Prediction of wedge’s supercavity shape[J]. Journal of Harbin University of Science and Technology, 2006, 11(4):106-110.(in Chinese)
[5] 张治勇, 杨洪澜, 张嘉钟. 楔形体诱导的非定常超空泡计算[J]. 工程力学, 2008, 25(8):42-47. ZHANG Zhi-yong, YANG Hong-lan, ZHANG Jia-zhong. Calculation of unsteady supercavity induced by wedges[J]. Engineering Mechinics, 2008, 25(8): 42-47.(in Chinese)
[6] 裴譞, 张宇文, 袁绪龙, 等. 尾翼对超空泡航行器形态及力学特性影响实验研究[J]. 实验流体力学, 2011, 25(1):23-28. PEI Xuan, ZHANG Yu-wen, YUAN Xu-long, et al. Exploring experimentally effect of tail wing on shape and dynamics characteristics on super-cavitation vehicle[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(1):23-28. ( in Chinese)
[7] 裴譞, 王育才, 张宇文, 等. 超空泡航行器舵效的水洞试验研究[J]. 西南交通大学学报, 2011, 46(6):1008-1018. PEI Xuan, WANG Yu-cai, ZHANG Yu-wen, et al. Experimental research on tail rudder efficiency of super-cavitation vehicle[J]. Journal of Southwest Jiaotong University, 2011, 46(6):1008-1018.(in Chinese)
[8] 邢彦江, 张嘉钟, 曹伟, 等. 尾翼楔角对通气超空泡特性影响试验研究[J]. 哈尔滨工业大学学报, 2013, 45(1):25-29. XING Yan-jiang, ZHANG Jia-zhong, CAO Wei, et al. Experimental investigation of the effect of tail wings wedge angle on ventilated supercavity hydrodynamic[J]. Journal of Harbin Institute of Technology, 2013, 45(1):25-29.(in Chinese)
[9] 张木, 易文俊, 谭俊杰, 等. 带尾翼水下自然超空泡射弹数值模拟研究[J]. 计算力学学报, 2013, 30(1):161-165. ZHANG Mu, YI Wen-jun, TAN Jun-jie, et al. Numerical investigation of underwater natural supercavitating projectiles operating with the empennages[J]. Chinese Journal of Computational Mechanics, 2013, 30(1):161-165. (in Chinese)
[10] 熊天红, 张木, 易文俊, 等. 带尾翼水下航行体超空泡流数值模拟研究[J]. 弹道学报, 2013, 25(4):43-47. XIONG Tian-hong, ZHANG Mu, YI Wen-jun, et al. Research on numerical simulation of supercavity flow around Underwater wing-vehicle[J]. Journal of Ballistics, 2013, 25(4):43-47.(in Chinese)
[11] 周清强. 带尾翼通气超空泡航行体流体动力数值模拟[D]. 哈尔滨: 哈尔滨工业大学, 2013. ZHOU Qing-qiang. Numerical simulation of hydrodynamic characteristics of underwater supercavitation vehicle with fins[D]. Harbin: Harbin Institute of Technology, 2013.(in Chinese)
[12] 张宇文, 袁绪龙, 邓飞. 超空泡航行体流体动力学[M]. 北京: 国防工业出版社, 2014. ZHANG Yu-wen, YUAN Xu-long, DENG Fei. Fluid dynamics of supercavitating underwater vehicles[M]. Beijing: National Defense Industry Press, 2014.(in Chinese)
[13] Kirschner I N, Kring D C, Stokes A W, et al. Control strategies for supercavitating vehicles[J]. Journal of Vibration and Control, 2002, 8(2):219-242.
[14] Goel A. Robust control of supercavitating vehicles in the presence of dynamic and uncertain cavity[D]. FL, US: University of Florida, 2005.
[15] Vanek B. Control methods for high-speed supercavitating vehicles[D]. MN, US: University of Minnesota, 2008.
[16] 林明东. 超高速鱼雷总体技术研究[D]. 长沙: 国防科学技术大学, 2012. LIN Ming-dong. Research on conceptual design technologies of ultrahigh speed torpedo[D]. Changsha: National University of Defense Technology, 2012.(in Chinese)
[17] 王雨. 水下高速航行体航向控制技术研究[D]. 哈尔滨:哈尔滨工程大学, 2012. WANG Yu. Research on course motion control of underwater high speed vehicle[D]. Harbin: Harbin Engineering University, 2012.(in Chinese)
[18] 王志学. 水下高速航行体纵向控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2013. WANG Zhi-xue. Research on longitudinal control of underwater high speed vehicle[D]. Harbin: Harbin Engineering University, 2013.(in Chinese)
[19] Zou W, Yu K P, Arndt R. Modeling and simulations of supercavitating vehicle with planing force in the longitudinal plane[J]. Applied Mathematical Modelling, 2015, 39(19):6008-6020.
[20] Escobar D, Vollmer D, Arndt R. Modeling, control, and experimental validation of a high-speed supercavitating vehicle[J]. IEEE Journal of Oceanic Engineering, 2015, 40(2):362-373.
[21] Escobar D. Modeling, robust control, and experimental validation of a supercavitating vehicle[D]. MN, US:University of Minnesota, 2015.
[22] Escobar D, Vollmer D, Arndt R. A dynamic testbed for supercavitating vehicle control[J]. Journal of Physics: Conference Series, 2015, 656:012144.
[23] 栗夫园, 张宇文, 滕鹏桦,等. 超空泡鱼雷外形优化[J]. 北京航空航天大学学报, 2014, 40(6):815-818. LI Fu-yuan, ZHANG Yu-wen, TENG Peng-hua, et al. Shape optimizaiton of supercavitating torpedo[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(6): 815-818.(in Chinese)
[24] 周后村. 超空泡航行体流体外形设计及水动力特性分析[D]. 长沙: 国防科学技术大学, 2015. ZHOU Hou-cun.Hydrodynamic configuration design and hydrodynamic characteristics analysis of supercavitating vehicles[D]. Changsha: National University of Defense Technology, 2015.(in Chinese)
[25] Wosnik M, Arndt R E A. Control experiments with a semi-axisymmetric supercavity and a supercavity piercing fin[C]∥7th International Symposium on Cavitation. Ann Arbor, MI, US: University of Michigan, 2009.
Numerical Research on Interaction between Control Surfaces andMain Cavity of Supercavitating Vehicles
ZHOU Hou-cun, XIANG Min, ZHANG Wei-hua
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, Hunan, China)
The homogeneous multiphase model and volume of fluid (VOF) method are used to simulate the interaction between control surface and main cavity of supercavitaing vehicle (SCV) under different flow patterns of cavity and angles of attack of control surface. Numerical result shows that the vehicle cavity shape affects the submersion depth of the control surfaces, and the variation of submersion depth is up to above 50 percent. The hydrodynamics of control surface is obviously affected by the variation of submersion depth. The length of main cavity is enlarged by 3 percent in average due to the presence of control surface, the cross shape of main cavity could be significantly changed when there is an angle of attack of the control faces, and the cavity shape of SCV experienced a worst deformation under a base closure cavity flow pattern. The interaction between control surface and main cavity of supercavitating vehicle should be taken into consideration during the design process of cavity flow pattern and control law.
fluid mechanics; supercavitating vehicle; cavity flow pattern; control surface; cavity; interaction
2016-07-18
国家自然科学基金项目(51406230)
周后村(1990—), 男, 博士研究生。 E-mail: zhouhoucun09@nudt.edu.cn
张为华(1962—), 男, 教授, 博士生导师。 E-mail: zhangweihua@nudt.edu.cn
TJ630.1
A
1000-1093(2017)05-0949-10
10.3969/j.issn.1000-1093.2017.05.015
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
火箭推进(2022年2期)2022-05-14
上海交通大学学报(2021年8期)2021-09-02
数字海洋与水下攻防(2021年2期)2021-05-08
流体机械(2021年1期)2021-02-23
红领巾·探索(2019年6期)2019-08-01
水下无人系统学报(2019年1期)2019-03-15
学生导报·东方少年(2019年28期)2019-01-17