
基于STC89C52单片机的自动泊车智能小车的设计与实现
2017-06-21 12:04喻伟闯刘世焯陈家茜
湖北民族大学学报(自然科学版) 2017年2期
喻伟闯,刘世焯,钱 楷*,杨 标,陈家茜
(1.湖北民族学院科技学院,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000)
基于STC89C52单片机的自动泊车智能小车的设计与实现
喻伟闯1,刘世焯2,钱 楷2*,杨 标2,陈家茜2
(1.湖北民族学院科技学院,湖北 恩施 445000;2.湖北民族学院 信息工程学院,湖北 恩施 445000)
设计一款具有自动泊车功能的智能小车,小车以STC89C52单片机为控制核心,系统由电机驱动模块、红外避障模块、超声波测距模块、LCD显示模块等部分组成.单片机产生两路PWM波控制小车的转向和速度,避障模块采用红外对管交叉避障方式检测小车在行驶过程遇到的障碍物,超声波测距模块用于测量小车在泊车过程中车身与车库墙壁之间的距离,LCD显示模块用于显示小车的实时速度、当前距离等基本信息.测试结果表明,系统性能稳定,小车能实现智能避障和自动泊车功能.
智能小车;红外避障;自动泊车;单片机
随着普通家庭小车拥有量的增多,在车库容积量有限的情况下,如何快速泊车成为车主尤其是新手司机面临的难题.自动泊车系统在国外并不罕见,目前我国各大汽车公司已开始了对此系统的研究,但这项技术还未发展成熟.本文设计的自动泊车智能小车系统,模拟现实汽车,利用多路传感器检测小车行驶和泊车过程中周围障碍物的方位、距离等信息,通过单片机控制小车的速度和行驶方向,从而实现小车自动泊车功能.
1 系统硬件设计
1.1 系统总体设计
本设计以STC89C52单片机作为控制核心,使用直流电机带动转轴驱动后轮转动,前轮使用舵机控制方向,模拟现实小车实现避障和智能泊车功能.系统主要由单片机控制模块、电机驱动模块、测速模块、红外避障模块、超声波模块以及显示模块六部分组成[1].系统总体框图如图1所示.
1.2 电机驱动模块
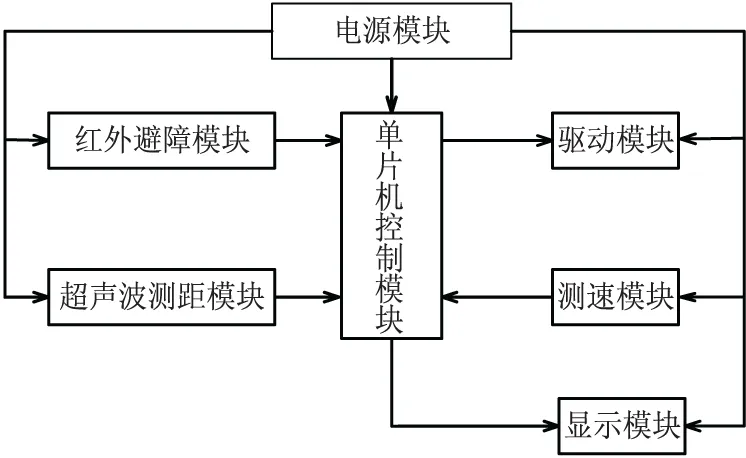
图1 系统总体框图Fig.1 Block diagram of system
设计中使用L298N作为电机驱动模块,L298N是一种大功率电机驱动芯片,它的工作电压可以达到46V,持续工作电流为2A,额定功率为25W[2-3].模块内部集成了两个H桥,采用高低电平信号控制电机正反转.将IN1、IN2端口分别接单片机的I/O口,控制直流减速电机的正反转[4],将ENA端口接单片机的PWM波输出口控制电机的转速[5].电机驱动模块如图2所示.
1.3 红外避障模块
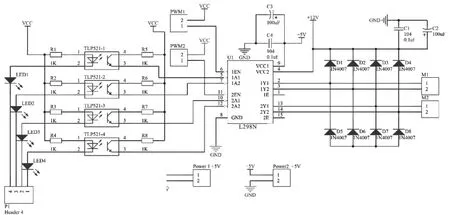
图2 电机驱动模块Fig.2 The motor driving module
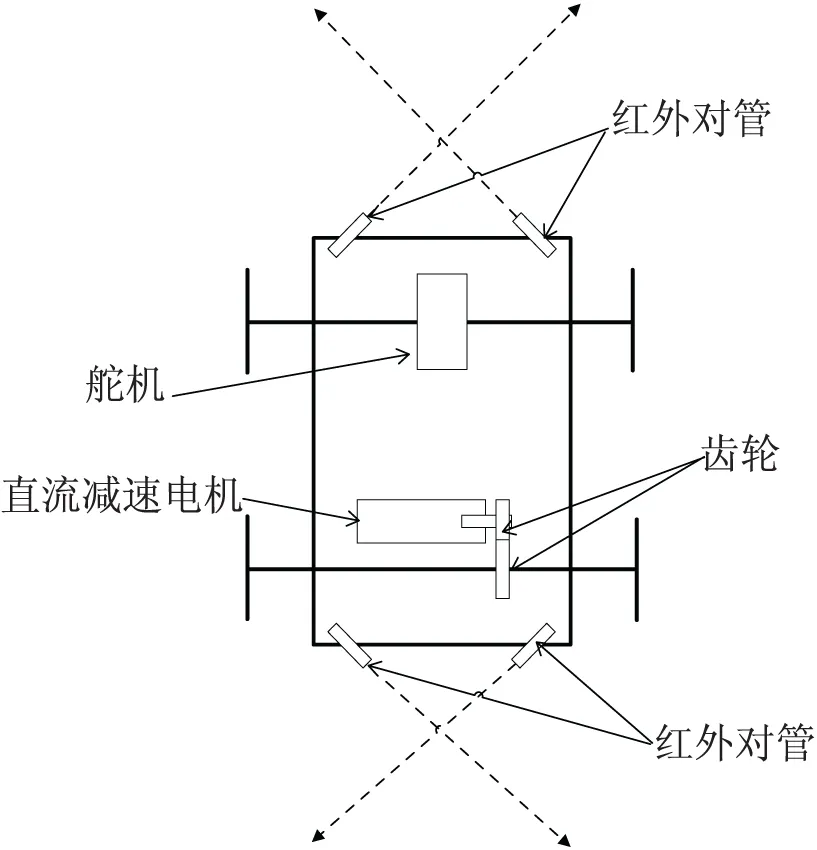
图3 红外避障交叉检测模式Fig.3 The cross detection mode ofinfrared obstacle avoidance
小车的避障分析主要考虑侧面避障和正面避[6].当小车只有一侧的传感器检测到障碍物时,则小车会将方向盘转向有障碍物一侧倒车然后转向另一侧前进,此时属于侧面避障[7];当小车进入凹形的地形,小车会无后路可选,程序出现死锁状况,称为小车落入陷阱[8],若小车两个传感器同时检测到有障碍物,说明其正前方出现障碍物,小车默认直线倒车然后向左转弯,此时属于正面避障.本系统采用双路红外对管交叉式避障模式,如图3所示,在小车车身前方两端和车身后方两端各安装一个HJ-IR2红外避障模块,实现了小车对各个方位障碍物的判断,克服了一般避障模式中无法克服的“点”避障[9],当检测方向上遇到障碍物时,其信号输出端口就会输出一个低电平信号,可供单片机采集,此模块还可通过调节电位器来调节检测障碍物的距离[10],有效提高了小车的避障能力.
1.4 超声波测距模块
采用HC-SR04模块,用超声波的I/O口TRIG触发测距,模块自动发送方波信号,自动检测是否有信号返回,如果有,I/O口ECHO就会输出一个高电平[11-12],超声波测距就是对传播时间进行检测,即发射信号到传播信号的时间[13].本模块使用方法简单,使用定时器计时就可以算出时间,不断测量就可测量出当前距离.超声波模块接线图如图4所示.单片机根据检测到的距离信息控制电机转向和转速,并在LCD显示模块上进行显示.
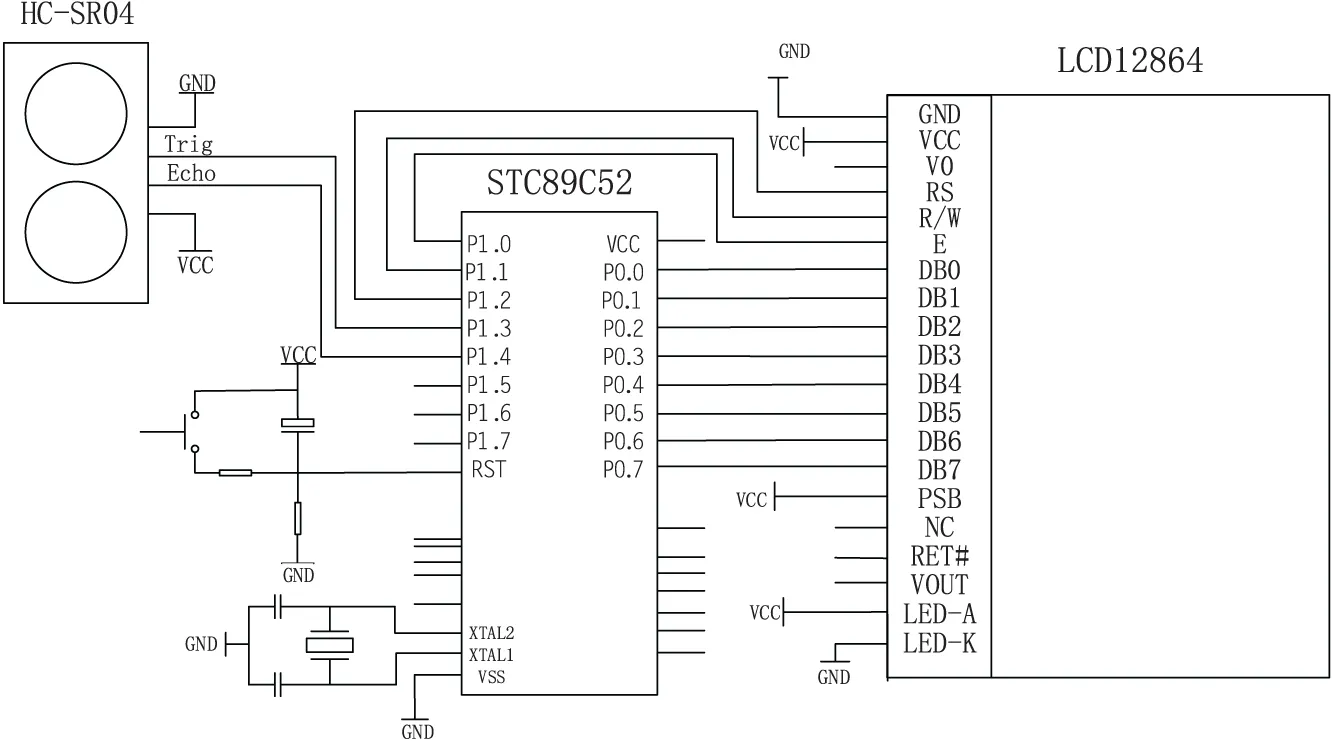
图4 超声波模块Fig.4 The ultrasonic module
2 系统软件设计
本系统以单片机为核心,利用单片机产生不同占空比的PWM波控制小车的走向,完成对各种障碍物的避障,实现了自动泊车等功能.在软件设计中要求小车有独立判断能力,并且能够在单片机控制下正常工作,当小车遇到障碍物时会自动选择合适的线路避开障碍物.系统流程图如图5所示.
3 测试结果与分析
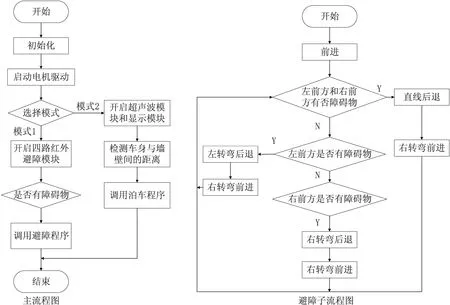
图5 系统流程图Fig.5 The flowchart of the system
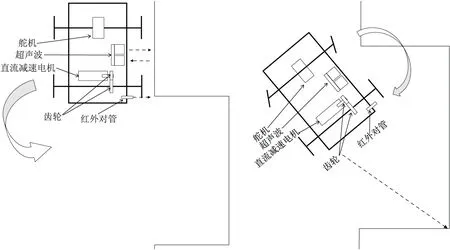
图6 泊车示意图Fig.6 The parking schematic of diagram
小车避障测试选用一段较多无规律障碍物的实验场地,小车在行进过程中不断检测周围障碍物,自动选择路线通过障碍物.其中障碍物位置改变小车行进的路线也会改变[14].小车入库分为三个步骤,首先将小车行驶到车位前方且车身方向与车位方向平行,然后开始倒车,当小车后轮刚好到达车位左上角的拐角时,顺时针转动方向盘继续倒车,当小车左侧车身与车库右下角在一条直线上时,逆时针转动方向盘直至小车完全倒入车位.本设计将速度调为恒定值,经过多次试验,得到小车到车库的距离与小车两次转动方向盘倒车行驶路程之间的函数关系,控制舵机转动的角度以及倒车时间使小车完成自动泊车.泊车示意图如图6所示.
4 结语
智能小车是综合了多门学科的前沿课题,有着广泛的应用前景[15].为实现全方位避障,本设计采用双路红外对管交叉式避障模式,运用超声波模块测量障碍物距离,通过单片机实现小车的自动泊车功能.该系统运行稳定,能耗较低,性价比高,具有一定的应用价值.
[1] 曹月真.基于51单片机的超声波测距系统的设计[J].电子世界, 2011(10):55-56.
[2] 李军,王艳.基于单片机的智能泊车系统设计[J].现代电子技术,2011,34(23):165-166.
[3] 李男,黄乘顺.基于单片机的步进电机细分控制器设计[J].湖南科技学院学报,2013(4):30-32.
[4] 魏雅,杜云.基于单片机遥控超声波测距智能小车[J].信息技术,2014(11):67-69.
[5] 苏琳.基于HC-SR04的超声波测距器的设计[J].科技信息,2012(9):124-125.
[6] 李丹.基于单片机的直流电机控制[J].中国新通信,2015(13):12-13.
[7] 顾志华,戈惠梅,徐晓慧,等.基于多传感器的智能小车避障系统设计[J].南京师范大学学报,2014,14(1):14-17.
[8] 梁玉清,李妍,何静涛.一种改进栅格蚁群算法的机器人路径规划[J].湖北民族学院学报(自然科学版),2014,32(2):196-199.
[9] 强彦,叶文鹏,屈明月,等.基于红外避障的智能小车的设计[J].微电子学与计算机,2013,(30)2:140-143.
[10] 周晶.室内智能轮椅自动避障系统研究[D].南京:南京师范大学,2014.
[11] 胡正兴,李一民,詹跃东.自动导引小车局部智能避障的A*算法[J].昆明理工大学学报,2005,30(5):51-53.
[12] 黄丽华,胡古月,高越.汽车防追尾智能系统研究[J].科技风,2013(14):6.
[13] 李昌禄,苏寒松.超声波定位系统的研究[J].实验室研究与探索,2013,32(2):39-44.
[14] 刘崇翔,高美凤.基于多超声波信息融合的小车避障算法实现[J].微计算机信息, 2012(8):32-34 .
[15] 刘进,齐晓慧,李永科.基于摄像头的智能小车设计与实现[J].传感器世界,2008,14(2):34-37.
责任编辑:时 凌
Design and Implemention of an Intelligent Car with Automatic Parking Based on STC89C52 MCU
YU Weichuang1,LIU Shizhuo2,QIAN Kai2,YANG Biao2,CHEN Jiaxi2
(1. Science and Technology College of Hubei University for Nationalities,Enshi 445000,China;2. School of Information and Engineering,Hubei University for Nationalities, Enshi 445000,China)
A kind of intelligent car with the function of automatic parking was designed in this paper. It adopted the STC89C52 MCU as the control core,and the system consists of the driver module of electric motor,infrared obstacle sensors,ultrasonic distance measuring module and LCD.The car′s steering and speed were controlled by two channels of PWM waves generated by the MCU.In driving,infrared emitting diode and photodiode sensors were used to crossways detect the barriers surrounding the car.During the process of parking,ultrasonic ranging system would measure the distance between the car and the garage wall.On the LCD screen,we could see the basic information such as real-time speed and the current distance of the car.The test results show that the system is stable,and the car is able to avoid obstacles intelligently and park automatically.
intelligent car;infrared obstacle avoidance;automatic parking;MCU
2017-01-14.
国家自然科学基金项目(61665002);湖北省自然科学基金项目(2015CFB609);湖北民族学院信息工程学院大学生创新创业训练计划项目(xgcx2016023).
喻伟闯(1982-),男,硕士,主要从事智能控制、嵌入式系统研究;*
钱楷(1982-),男,博士,副教授,主要从事光纤传感、智能控制的研究.
1008-8423(2017)02-0195-03
10.13501/j.cnki.42-1569/n.2017.06.019
TP311
A
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
军民两用技术与产品(2020年3期)2020-04-07
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
