
双行星排式动力耦合机构动态特性分析
2017-07-06 11:02郑铭垠左言言吴传刚杨忠凯
重庆理工大学学报(自然科学) 2017年6期
郑铭垠,左言言,吴传刚,杨忠凯
(江苏大学 振动噪声研究所, 江苏 镇江 212013)
双行星排式动力耦合机构动态特性分析
郑铭垠,左言言,吴传刚,杨忠凯
(江苏大学 振动噪声研究所, 江苏 镇江 212013)
以某款混合动力汽车动力耦合机构为例,综合应用UG、ADAMS及ANSYS建立双行星排式动力耦合机构刚柔耦合动力学模型;对建立的系统动力学模型进行典型工况下的仿真分析,通过分析前后排行星轮系轮齿啮合力、轴系角加速度的时域和频域响应曲线,得到该动力耦合机构在稳态(如纯电动、巡航)和非稳态(如发动机起动)工况下的动态特性。仿真结果表明:该动力耦合机构稳态工况下动态特性峰值频率主要为低频段的旋转频率和两行星排的啮合频率及其倍频;非稳态工况初期存在瞬时冲击激励,但前排行星轮系动态特性的变化对后排行星轮系影响较小。
混合动力汽车;动力耦合机构;行星齿轮;动态特性
动力耦合机构是耦合混合动力汽车发动机和电机输出动力的关键部件,其中行星齿轮动力耦合机构的应用最为广泛[1]。动力耦合机构要承受各动力源输入的稳态载荷和动力切换过程中的瞬态冲击,由此产生的振动与噪声直接影响乘坐舒适性[2]。
行星齿轮系统动态特性以齿轮副啮合时的动力学特性为核心。主要研究齿轮系统在传递动力过程中的冲击、振动和噪声规律,为设计振动小、噪声低、可靠性高的齿轮系统提供理论依据[3]。王伟华等[4-6]分析了行星齿轮式混合动力汽车动力耦合机构的构型和工作模式,得到了不同工作模式下动力耦合机构输出的转速和转矩特性。Deur[7]建立了某车辆行星传动系统动力学模型,验证了系统的传动规律与动力学特性。
前人对行星齿轮系统进行了大量而深入的研究,但对包含整个传动系和结构系的复合行星齿轮系的多工况动力学研究还很少。本文通过建立ADAMS多体动力学模型,对动力耦合机构进行典型工况下的动力学仿真,分析不同工况下各构件的运动特性以及齿轮啮合力的时域和频域特性。
1 动力耦合机构三维实体建模
1.1 混联式混合动力系统
混联式动力耦合系统综合了串联和并联的特点,其动力源包括内燃机和电机,通过行星齿轮动力耦合机构的耦合作用,既可以实现各动力源的单独驱动,也可以实现2个动力源的联合驱动[8]。本文以某混联式混合动力汽车为例,建立其动力耦合系统的示意图,如图1所示。
此混合动力系统的动力源包括发动机、电机MG1/电机MG2。其动力耦合机构由前后排行星齿轮系构成,都以齿圈作为动力输出部件。两行星齿轮排的内齿圈分别嵌套在复合齿轮机构的左右两边。两行星齿轮系与各动力源的连接关系如下[9]:

1.发动机;2.扭转减振器;3.电机MG1;4.前排行星轮系;5.复合齿轮机构;6.后排行星轮系;7.电机MG2;8.主减速器齿轮;9.驱动桥
图1 某混联式混合动力汽车动力系统结构
1.2 动力耦合机构三维实体建模
根据已知的结构参数,利用UG8.0自带的齿轮库建立行星轮系中各渐开线斜齿轮的实体模型,得到行星轮系的三维模型,如图2 所示。表1为双排行星轮系各齿轮的基本参数。
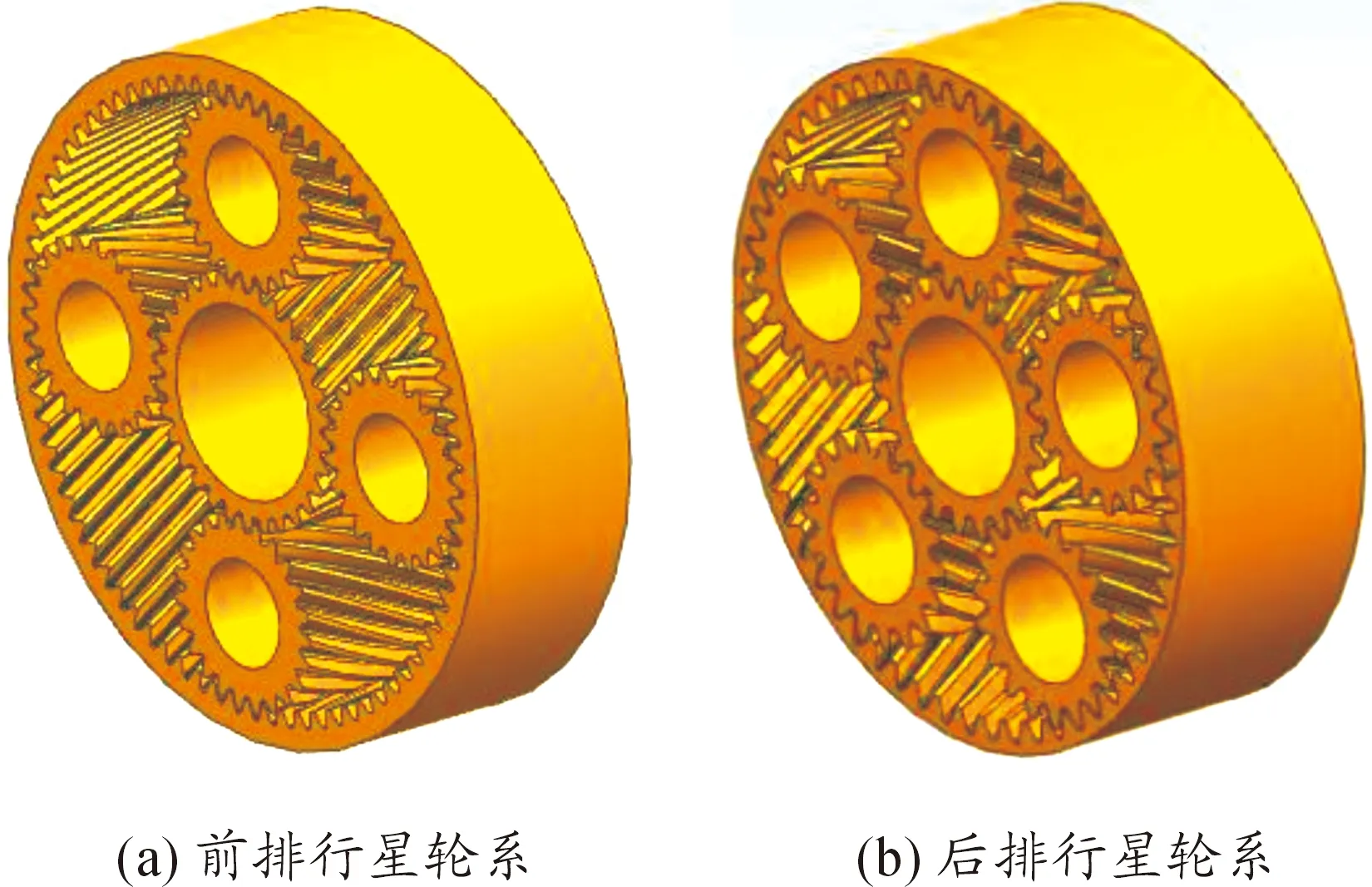
图2 斜齿行星齿轮系实体模型
整个动力耦合系统还包括发动机输入轴、两电机及其输入轴、复合齿圈、轴承等部件。根据已知的参数,建立各子部件的实体模型。应用UG的装配模块,通过施加各种约束关系,将动力耦合系统的各部件装配成一体,整个装配体模型见图3。

图3 动力耦合系统装配体模型
2 动力耦合机构多体动力学建模
将UG模型通过中间格式(Parasolid)导入到ADAMS中,定义系统部件的材料属性,包括密度、泊松比和弹性模量;施加各构件的约束关系;采用冲击函数法定义轮齿之间的接触力[10]。该动力耦合机构运行工况复杂多变,发动机、电机MG1/MG2要根据工况条件频繁启停。为了提高计算精度,利用ANSYS将发动机输入轴、两电机输入轴进行柔性化处理[11]。创建的刚柔耦合动力学模型如图4所示。

图4 刚柔耦合动力学模型
3 动力耦合机构多体动力学仿真分析
3.1 载荷和驱动的施加
采用混合动力汽车检测仪对其进行路上试验,得到典型工况下各动力元件的转速和转矩数据,如表2所示。
3.2 仿真观测点的选择
动力耦合系统的振动噪声特性与两行星排的啮合传动息息相关,所以选择两行星排的太阳轮与行星轮、行星轮与内齿圈的啮合力为观测目标。在汽车运行过程中,发动机要频繁起停,两电机要在发电机和电动机之间频繁切换,所以选择发动机输入轴和两电机输入轴的质心角加速度作为观测点,研究其扭转振动特性。

表1 双排行星轮系各齿轮的基本参数
注:“前排”含4个行星轮,各齿轮存在变位;“后排”含5个行星轮,各齿轮为标准斜齿轮。

表2 不同工况下各动力元件的试验数据
注:v为车速(km·h-1);nEng、nMG2、nMG1为发动机、电机MG2、电机MG1的转速;TMG2、TMG1为电机MG2、电机MG1转矩。

图5 啮合力时域和频域响应曲线
3.3 动力耦合机构典型工况仿真结果及分析
3.3.1 纯电动工况
根据表2,在v=30 km/h纯电动工况下,电机MG2输入转速nMG2=2 250 r/min,由于动力耦合机构中相互啮合的齿轮之间存在间隙,仿真的初始时刻会存在瞬态冲击,为了尽量减少仿真初始时刻的瞬态冲击,使用Step函数为电机MG2转子施加转速驱动:nMG2=step(time,0,0,0.05,13 500d),表示在0.05 s时转速增加至13 500(°)/s,复合齿圈负载力矩Tv=16.85 N·m[12]。仿真时间为0.5 s,步数为1 000步。
由图5啮合力的频域响应曲线可知:后排行星轮系在频率f=825 Hz,f=1 650 Hz处存在明显的峰值,分别对应后排啮合频率及其2倍频;在低频段f=37.5 Hz处也存在峰值,对应太阳轮的旋转频率;前排行星轮系在f=1 110 Hz,f=2 219 Hz处存在明显峰值,分别对应前排啮合频率及其2倍频;另外,在低频段f=74.8 Hz处存在明显峰值,对应太阳轮的2倍旋转频率。
由图6轴角加速度时域响应曲线可知:齿轮系统在传动过程中存在明显的动载成分,各轴角加速度存在波动。由频域特性曲线可知:各输入轴角加速度低频成分比较明显,主要为输入轴的旋转频率及其倍频。此外电机MG2输入轴在f=3 287 Hz存在峰值,对应后排啮合频率4倍频;MG1输入轴在f=2 218 Hz存在峰值,对应前排啮合频率的2倍频,但两者的峰值并不突出。
综上可知,在纯电动稳态工况下,动力耦合机构运行平稳,其频域特性的主要峰值频率为低频段的旋转频率和两行星排的啮合频率及其倍频。

图6 轴角加速度时域与频域响应曲线
3.3.2 巡航工况
对于v=30 km/h巡航工况,根据表2,使用Step函数对发动机和电机MG2转子施加转速驱动:nEng=Step(time,0,0,0.05,7 320d),nMG2=Step(time,0,0,0.05,13 218d);对复合齿圈施加负载转矩Tv=16.85 N·m[12],两电机都作为发电机,此时两电机的负载转矩TMG1=-6.25 N·m,TMG2=-9.25 N·m。仿真时间为0.5 s,步数为1 000步。
由图7啮合力时域和频域响应曲线可知:在稳态巡航工况下,各齿轮对之间的啮合力时域信号比较平稳。并且后排在其啮合频率f=807.8Hz及其2倍啮合频率f=1 615 Hz处存在峰值,另外后排太阳轮与行星轮啮合力在f=36.6 Hz处也存在较大峰值,其对应太阳轮的旋转频率,而前排峰值频率f=37 Hz对应前排太阳轮旋转频率,峰值频率f=500 Hz对应前排啮合频率。
由图8轴角加速度频域响应曲线可知:各输入轴角加速度频域信号比较平稳,其峰值频率主要为低频的旋转频率或2倍旋转频率。
综上可知:在稳态巡航工况下,动力耦合机构运行平稳,其主要峰值频率为两行星排的啮合频率及其倍频、输入轴的旋转频率及其倍频。

图7 啮合力时域和频域响应曲线
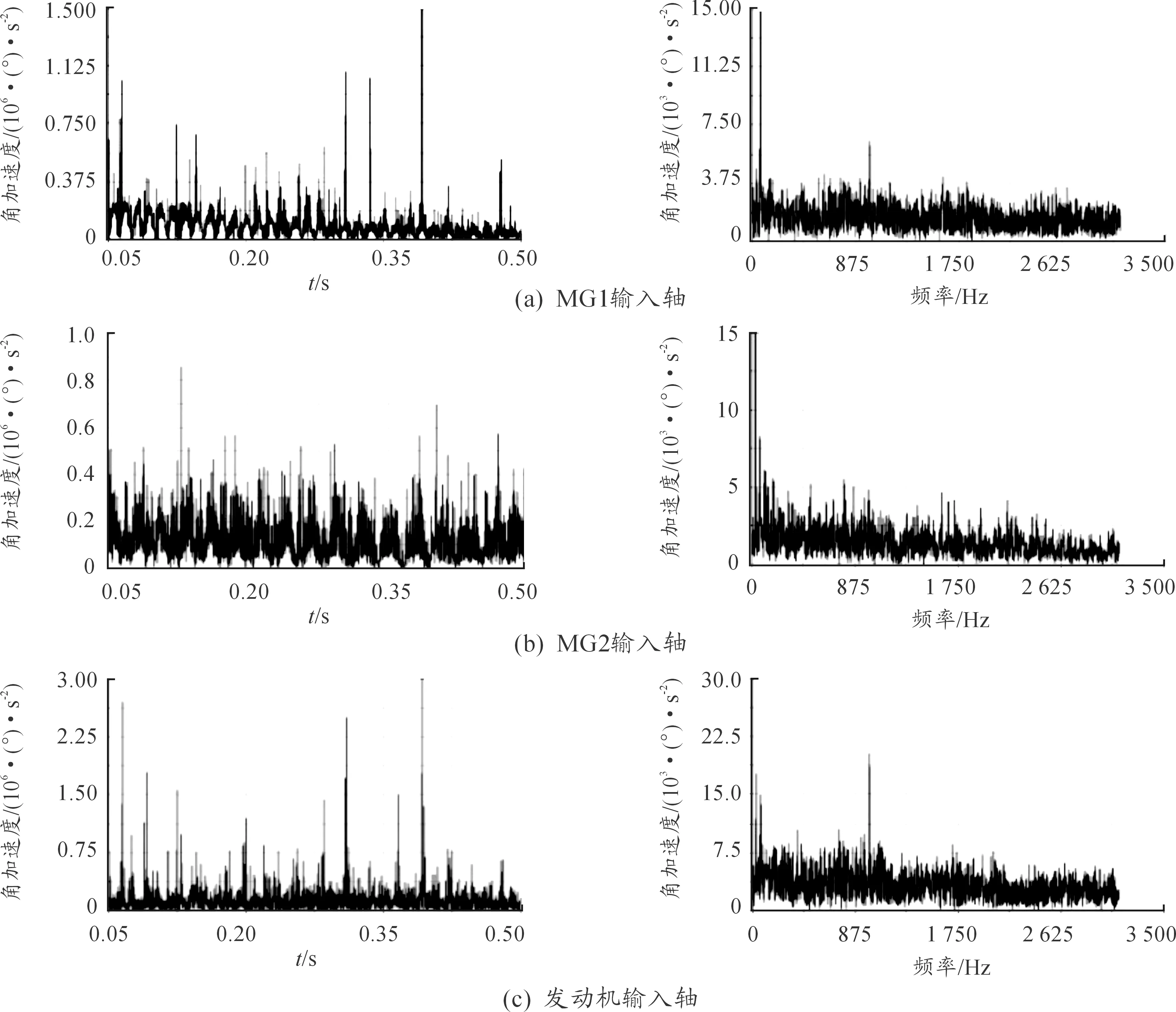
图8 轴角加速度时域和频域响应曲线
3.3.3 停车工况下发动机启动
启动汽车之后,若电池电量不足或发动机水温过低,电机MG1会作为启动电机,带动太阳轮旋转,并通过行星架启动发动机。根据表2,对电机MG1施加转速驱动:nMG1=Step(time,0,0,0.25,-7 020d),由发动机转动惯量求得其输入轴上的负载力矩TEng=34 N·m。仿真时间为0.25 s,仿真步数为500步:
由图9前排啮合力响应曲线可知:发动机启动的前半段时间,前排啮合力存在一定的瞬时冲击激励,随着发动机的起动,啮合力逐渐趋于平稳;从频域响应曲线可知,并未出现突出峰值,但低频段幅值较大。
由图10角加速度时域响应曲线可知:电机MG1和发动机输入轴依然在发动机启动前半段时间存在较大的冲击振动,而频域特性中并没有突出峰值。 综上可知:停车状态下发动机启动时,前排行星轮系在前半段时间内存在一定的冲击振动,但随着发动机运行逐渐趋于平稳,其频域响应曲线中并未出现突出的峰值。

图9 啮合力时域和频域响应曲线

图10 轴角加速度时域和频域响应曲线
3.3.4 发动机在纯电动工况下启动
汽车起初在纯电动模式v=30 km/h匀速行驶,当电量下降到设定值或猛踩油门踏板的一瞬间,发动机会在电机MG1的带动下迅速启动,电机MG1由反向空转迅速转变为正转。根据表2,为电机MG2施加转速驱动:nMG2=13 500 r/min;MG1转速驱动nMG1=Step(time,0.05,13 314d,0.25,-3 967.8d),其表示0.05 s之前为纯电动工况, 0.05 s至0.25 s为发动机启动状态;复合齿圈负载力矩Tv=16.85 N·m[12];此外,在发动机轴上施加克服转动惯量负载TEng=34 N·m。仿真时间为0.25 s,仿真步数为500步。
由啮合力的时域和频域响应曲线可知:纯电动工况下发动机启动时,后排啮合力特性并未受到太大影响,依然在啮合频率f=825 Hz及2倍啮合频率f=1 650 Hz处存在突出的峰值;而由于此时电机MG1及发动机的转速都在变化,前排啮合力特性变化较大,发动机启动初期前排啮合力信号并不十分平稳,在某些时刻会存在瞬态冲击,但冲击载荷峰值不大,而且频域特性中并没有突出的峰值。
由各轴角加速度响应曲线可知:纯电动工况下发动机启动时,电机MG2输入轴角加速度并未出现太大变化;电机MG1输入轴角加速度在发动机启动初期出现了较大波动,随着发动机运行逐渐趋于平稳,发动机输入轴角加速度逐渐减小。
综上可知:纯电动工况下发动机启动时,前排行星轮系动态特性的变化对后排行星轮系及复合齿圈动态特性影响较小。

图11 啮合力时域和频域响应曲线

图12 轴角加速度时域和频域响应曲线
4 结论
1) 在稳态工况(如纯电动工况和巡航工况)下,该动力耦合机构运行平稳,其动态特性峰值频率主要为两行星排的啮合频率及其倍频。
2) 在停车状态下发动机启动时,初期存在一定的瞬时冲击激励,但随着发动机的运行啮合力逐渐趋于平稳。
3) 在纯电动工况下发动机启动时,前排行星轮系动态特性的变化并未对后排行星轮系造成太大的影响。
4) 此双行星排式动力耦合机构结构合理,可以适应各种典型的工况。
[1] 朱福堂,陈俐,殷承良,等.混合动力汽车行星齿轮机构的方案设计与优选[J].中国机械工程,2010,21(1):104-109.
[2] 周立峰.基于ANSYS 的行星齿轮系统参数化建模与模态分析[D].南京:南京航空航天大学,2009.
[3] 李润方,王建军.齿轮系统动力学:振动、冲击、噪声[M].北京:科学出版社,1996.
[4] 王伟华,宋瑞芳,刘松,等.双模功率分流式混合动力系统构型分析[J].汽车工程,2015,37(6):648-654.
[5] 欧阳明高,田硕,徐梁飞.汽车动力的混合化发展趋势与构型分析[J].汽车工程,2008,30(9):742-752.
[6] BURRESS T A,CAMPBELL S L,COOMER C L,et al.Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System [R].Oak Ridge,Tennessee:Oak Ridge National Laboratory,2011,3.
[7] DEUR J,ASGARI J,HROVAT D,et al.Modeling and analysis of automatic transmission engagement dynamics-linear case[J].Journal of Dynamic Systems,Measurement and Control 2006,128:263-277.
[8] 赵博闻.一种双排行星轮系动力耦合方案研究[D].上海:上海交通大学,2013.
[9] 莫愁,陈吉清,兰凤崇.混合动力汽车动力集成传动机构的设计与分析[J].汽车工程,2016,38(1):36-41.
[10]毕凤荣,崔新涛,刘宁.渐开线齿轮动态啮合力计算机仿真[J].天津大学学报,2005,38(11):991-995.
[11]田磊.混合动力汽车动力分配器壳体结构改进及优化[D].长春:吉林大学,2012.5.
[12]余志生.汽车理论[M].3版.北京:机械工业出版社,2003:1-4.
(责任编辑 刘 舸)
Dynamic Characteristic Analysis of Double Planetary Gear Power Coupling Mechanism
ZHENG Ming-yin, ZUO Yan-yan, WU Chuan-gang, YANG Zhong-kai
(Institute of Noise and Vibration, Jiangsu University, Zhenjiang 212013, China)
Taking a double planetary gear power coupling mechanism of hybrid electric vehicle as an example,this paper established multi-body system dynamics model of the double planetary gear power coupling mechanism through the comprehensive application of UG, ADAMS and ANSYS. Then,simulation analysis of multi-body system dynamics model under typical steady conditions was carried out. Through the analysis of time domain and frequency domain response curve of shafting angular acceleration and meshing forces,this paper obtained the dynamic characteristics of coupling mechanism in the steady state conditions (such as electric,cruise) and non-steady state conditions(such as engine starting). Simulation results show that in the steady state conditions, the peak frequency of dynamic characteristics is rotating frequency,meshing frequency of double row of gear planetary and its octave. Transient impact exists in the initial stage of non-steady state, but the dynamic characteristics of front row planetary gear have little influence on rear planet gear.Key words: hybrid electric vehicle; power coupling mechanism;planetary gear; dynamic characteristic
2016-08-15
国家自然科学基金资助项目(51575238)
郑铭垠(1992—),男,浙江宁波人,硕士研究生,主要从事振动与噪声控制研究,E-mail:zmygogoing@163.com ;通讯作者 左言言(1958—),男,江苏涟水人,教授,博士生导师,主要从事振动与噪声控制研究。
郑铭垠,左言言,吴传刚,等.双行星排式动力耦合机构动态特性分析[J].重庆理工大学学报(自然科学),2017(6):47-56.
format:ZHENG Ming-yin, ZUO Yan-yan, WU Chuan-gang, et al.Dynamic Characteristic Analysis of Double Planetary Gear Power Coupling Mechanism[J].Journal of Chongqing University of Technology(Natural Science),2017(6):47-56.
10.3969/j.issn.1674-8425(z).2017.06.007
TH113
A
1674-8425(2017)06-0047-10
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
百科探秘·航空航天(2020年6期)2020-07-09
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
雷达学报(2018年3期)2018-07-18
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年3期)2017-11-23
少儿科学周刊·儿童版(2016年1期)2016-03-14
火控雷达技术(2016年1期)2016-02-06
陶瓷学报(2015年4期)2015-12-17
