
基于ARM的伺服转台控制系统设计
2017-07-06 11:03王颢锦李久龙
重庆理工大学学报(自然科学) 2017年6期
王颢锦,李久龙
(南京炮兵学院 侦测系, 南京 211132)
基于ARM的伺服转台控制系统设计
王颢锦,李久龙
(南京炮兵学院 侦测系, 南京 211132)
为了提高伺服转台控制系统位置精度要求。该控制系统以ARM(LPC2124)为控制核心,旋转变压器作为转台位移检测部件,采用了双闭环控制结构(速度环和位置环),以模拟量实现速度环、数字量实现位置环。硬件由电源电路,RS232通信,电机驱动器,伺服系统等组成。通过比较实测位置和理论位置得到位置误差,不断调整专家PID的参数。实验结果表明:该转台位置伺服精度在-0.8″~1.2″范围内,系统运动稳定可靠,满足伺服转台控制系统的精度要求。
旋转变压器; ARM; 双闭环; 专家PID控制器
随着我国制造业的发展,作为数控机床的主要功能部件,精密数控转台在整个机床工具行业中的作用越来越重要[1]。发展大型精密高速数控装备和数控系统及功能部件可改变大型高精度数控机床大部分依靠进口的现状,满足机械、航空、航天等工业发展的需要[2]。除了位置检测部件之外,控制系统的硬件选择与控制方法的选择决定了控制系统的位置精度。文献[3]利用运算放大器的饱和特性,设计了非线性校正装置来解决系统的稳定性;文献[4]采用了单神经元PID控制器设计方法。
本文设计了采用伺服电机驱动、蜗轮蜗杆传动的伺服转台控制系统。该转台采用嵌入式微控制器ARM为基础的全闭环控制系统,其中专家PID控制器提高了转台控制系统的鲁棒性,具有定位精度高、运动平稳、系统响应快的特点,能够满足转台的位置控制的要求。
1 转台的系统结构与控制原理
1.1 系统总体结构
在机械传动中,尽管采用高减速比的传动系统,但是不可避免地存在诸如机械爬行、齿隙等误差现象,要实现高精度位置伺服系统,必须采用双闭环控制系统,通过位置环直接检测转台位置,通过速度环进行伺服控制。转台及其控制系统结构如图1所示。
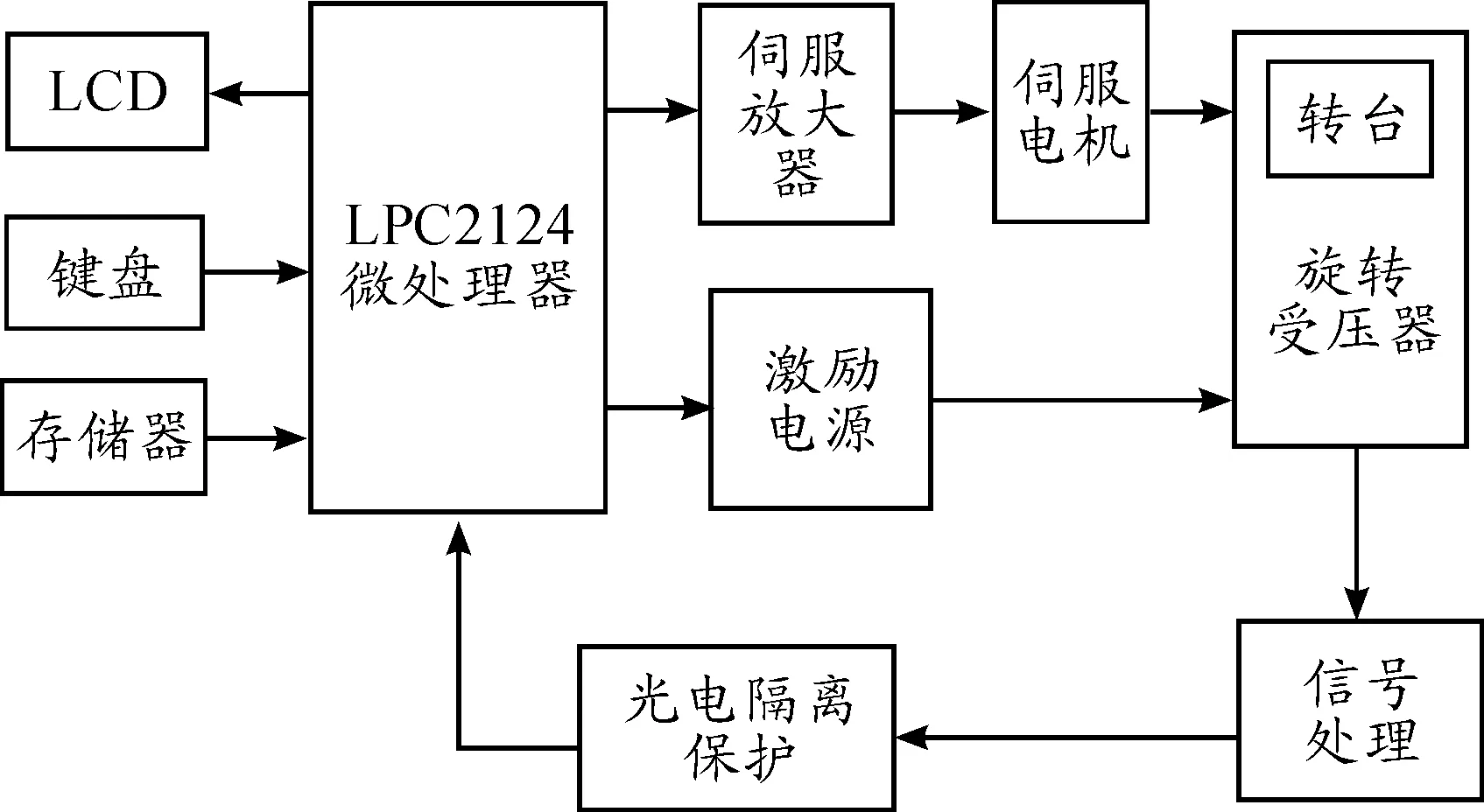
图1 转台及其控制系统结构
伺服转台控制系统主要由上位机、下位机控制器ARM(LPC2124)、角位移测量器件旋转变压器、驱动机构伺服电机、执行机构转台和强弱电隔离保护组成。旋转变压器的位置检测精度和控制系统的精度决定转台定位精度。上位机主要完成向下位机发送控制命令和接收下位机的反馈信息。下位机ARM能够实现各种复杂的控制算法,主要完成旋转变压器数据的实时采集,控制转台的运动和定位,以及保持与上位机的通信,从而大幅度提高伺服转台的控制性能。下位机ARM还要完成对输入的旋转变压器信号进行处理,计算出控制量并将控制信号输出给伺服放大器。
1.2 控制原理分析
在转台控制系统中,采用了速度与位置反馈组成的双闭环控制结构。数字量控制位置环,旋转变压器输出的数字信号作为位置反馈,送往下位机控制器。模拟量控制速度环,下位机输出的数字量经数字量转换为模拟量,成为速度环的输入值。速度控制器的输出成为电流控制器的输入值,反馈信号来自采样电流,驱动部件驱动交流伺服电机带动负载部件进行转动。控制回路的结构如图2所示。
为了获得零跟踪误差,控制系统的数字位置环采用带速度与加速度前馈的PID控制方式,而模拟控制部分采用电流环以实现对电动机转矩的控制。系统控制回路如图2所示。
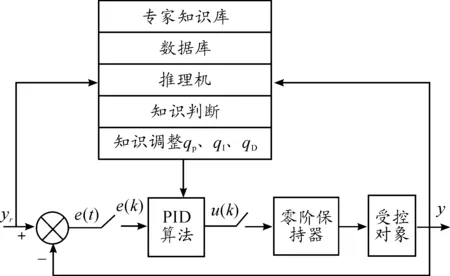
图2 控制回路的结构
1.3 专家PID控制器原理
在人工智能领域中,专家系统的发展是一种基于智能的、知识的计算机程序系统。专家系统有2个要素[5]:知识集和推理机制。在控制系统中,专家PID控制器是一种自适应地管理受控对象,使之满足预期要求的系统。控制型专家系统具有解释、诊断、预报、执行等功能[5]。
图3为专家PID控制器原理。从图中可以看出专家PID控制器由下面几个模块组成:PID算法、零阶保持器、专家知识库、数据库、推理机[6]。
专家知识库里存放着许多专家日积月累的专业经验和设计技巧。数据库保存着实验数据、统计数据、各种参数。推理机利用专家知识库和数据库进行一定的推理和计算,进行系统方案的优化。知识的判断与调整就是通过人工方法或机器学习的方法,将专家所特有的经验性知识转化为计算机程序的过程。通过修改程序,判断每一次被控对象的过渡过程,观察响应曲线,看是否能达到所指定的指标,最后将信息传送给知识调整模块。
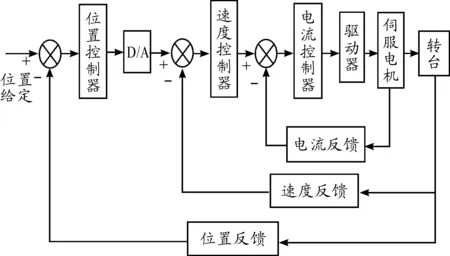
图3 专家PID控制器原理
2 基于ARM的运动控制器
2.1 硬件电路设计
硬件电路设计主要包括电源电路、复位电路、时钟电路、串口通信电路等,其中最重要的是电源电路和串口通信电路,电源电路提供整个系统信号的基准,串口通信电路是保证上下位机正常通信的保证。
2.1.1 电源电路
ARM(LPC2124)微控制器芯片的内核需要1.8 V的电压,I/O口需要3.3 V的电压,内部所需的数字电源由内嵌的线性电源电源管理器提供。本设计的电源电路如图4所示。外部输入5 V直流电源,经过电容滤波,然后通过低压差线性稳压芯片SPX1117M-3.3V将电源电压转换至3.3 V。此电源电路通用性比较强,不改变电路别的参数,只要将低压差线性稳压芯片更换为NCP585HSN18T1G就得到内核需要的1.8 V的电压。在其输入、输出端并联10 μF的钽电容来改善电源的瞬态响应和稳定性。D1为防止反接电源烧毁电路而设计的二极管。
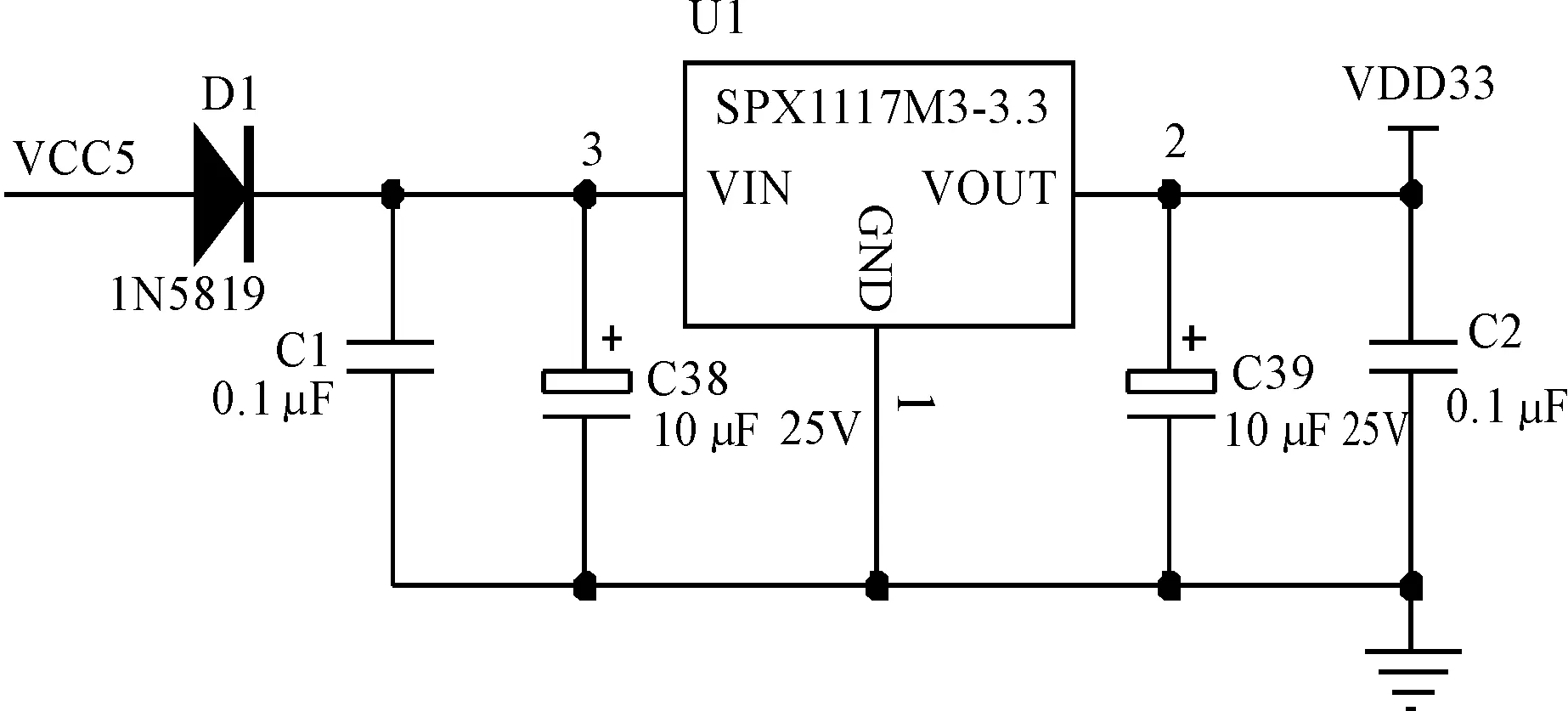
图4 5 V转3.3 V电源电路
2.1.2 RS232串口信号传输电路
通过通用RS232串口把下位机的数据上传到上位机界面。在电气特性上,RS232标准采用负逻辑方式,TTL电平需要进行RS-232电平转换后才能进行通信,所以本系统采用SP3232EEY芯片进行逻辑电平转换。最后通过DB9连接上下位机,在DB9端口只使用3个引脚:2号引脚接收数据;3号引脚发送数据;5号引脚信号地就能实现上位机与下位机的通讯。在程序中设置好串口通信参数:数据位、停止位、波特率和奇偶校验位,就可以实现正常的数据通讯。RS232串口电路如图5所示。
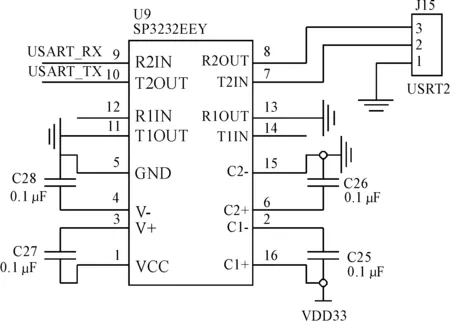
图5 串口电路
系统复位后,ARM运行存储器保存伺服转台系统主程序以及进行系统硬件的初始化。该数控系统通过RS232总线接口与计算机连接,上位机通过用户界面接受用户设置的运动参数,通过RS232向下位机发送指令,主要完成伺服转台的控制操作、数据输入输出和各功能模板的管理及伺服转台故障监测和安全保护等控制功能,以及各人机界面的管理功能[7]。下位机是直接控制构成转台的数字伺服控制系统,完成保证转台的位置精度以及与上位机通信等任务[7]。将采样到的数据发送到计算机,完成控制过程中控制指令与状态参数的传递。
2.2 控制系统软件设计
控制系统定位软件设计流程如图6所示,下位机等待接受定位指令,ARM根据指令发送PWM脉冲控制伺服电机的运动速度、加速度和运动距离;旋转变压器实时检测伺服转台的位置,并反馈数据到ARM,直到转台运动到预定位置。在定位的过程中涉及2项关键技术:伺服电机的控制和旋转变压器信号的转换。通过微控制器精确定位算法实现伺服转台的高精度定位[8]。伺服电机的控制方式采用闭环控制,以旋转变压器作为反馈元件构成闭环,将伺服转台的位置信息反馈到控制程序,比较实测位置和理论位置得到位置偏差信息。ARM通过发送驱动信号不断修正偏差来提高定位精度。
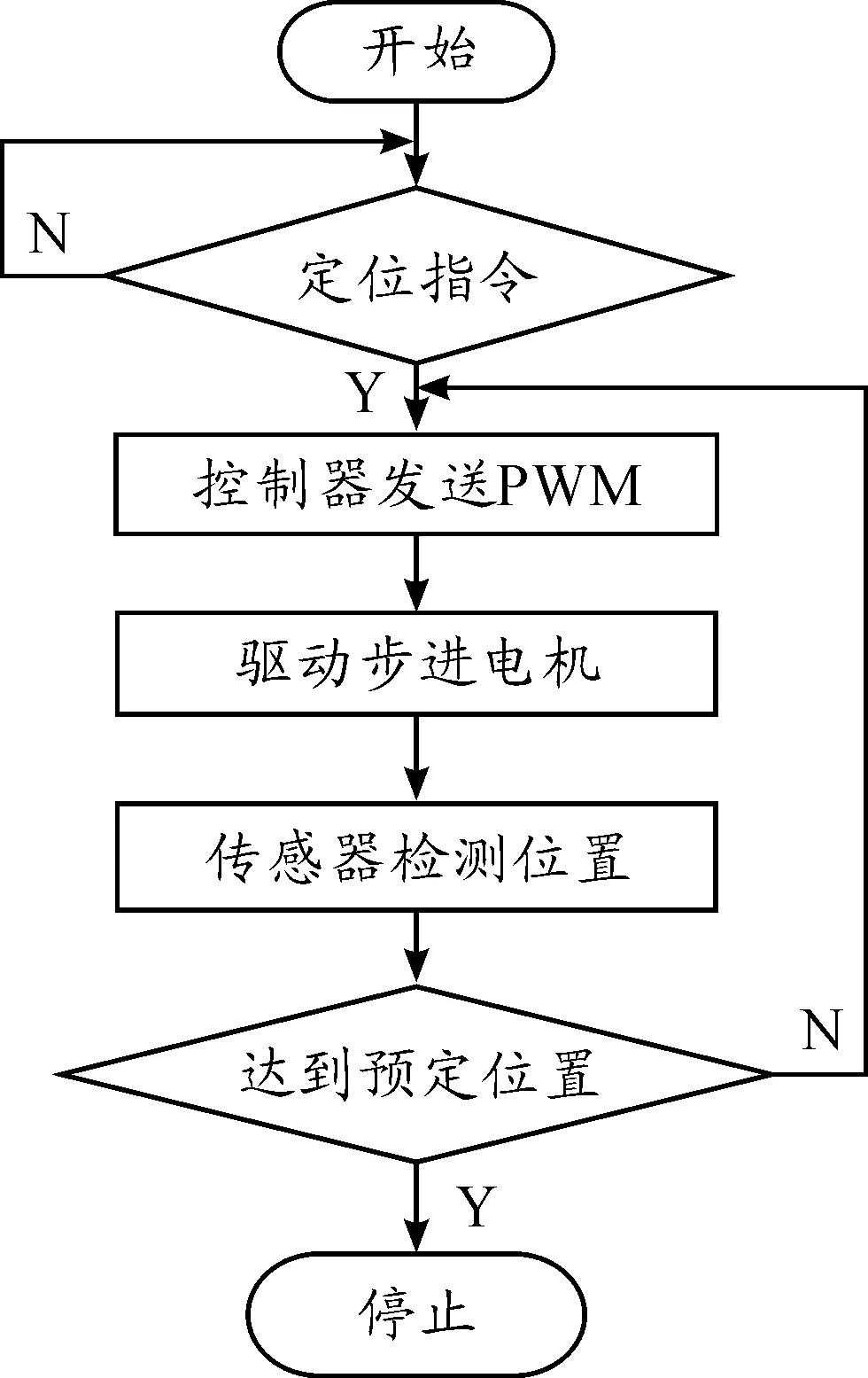
图6 控制系统定位软件设计流程
3 实验结果与分析
3.1 转台的位置伺服
位置伺服精度是高精密伺服转台最重要的指标之一,应达到角秒级,为此必须进行位置伺服误差试验。打开控制系统进行随机采样,采用专家PID算法实现反馈控制功能。图7是实验中得到的位置伺服误差曲线。
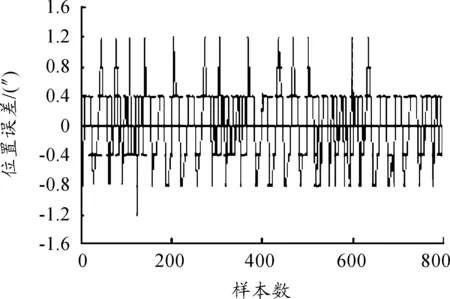
图7 位置伺服误差曲线
从图7中可以看出:位置伺服误差的幅值基本在-0.8″~1.2″之间,误差平均值大约为0,达到了系统控制精度的要求。虽然采用了双闭环的控制方法,但是由于传动系统摩擦力矩的存在,所以位置伺服误差曲线不会很平滑。另外,采样点之间的测量误差也给各采样时刻位置误差的估计引入了误差。在以后的研究中,将采用更好的驱动器件与传动机构来提高伺服系统的精度,同时采用更高精度的位移检测装置。
3.2 系统的响应曲线
在图3的专家PID控制器中知识调节模块是根据知识判别模块传送来的信息确定要不要对修正系数qP、qI、qD进行调节。若无需调节,则保存原来的修正系数输出;若要调节,则根据推理机模块,确定对应的修正参数,根据指标误差大小对参数进行对应的修改,保存该次指标和被调参数作为下一次修改参数的依据。按照受控对象要求的指标和输出响应,通过比对实现对qP、qI和qD三个参数的修改,使受控对象的动态和稳态性能得到逐步改善[6]。
专家PID控制器,能够根据专家丰富的经验和知识,及时调节PID参数,具有良好的控制特性及鲁棒性。
图8为输入为单位阶跃的伺服系统的响应曲线,其中:最优PID控制器的响应曲线为2;常规PID控制器的响应曲线为1;专家PID控制器的响应曲线为3。实验结果表明:专家PID控制的响应曲线最好,达到稳定的时间最短,且超调量最小。
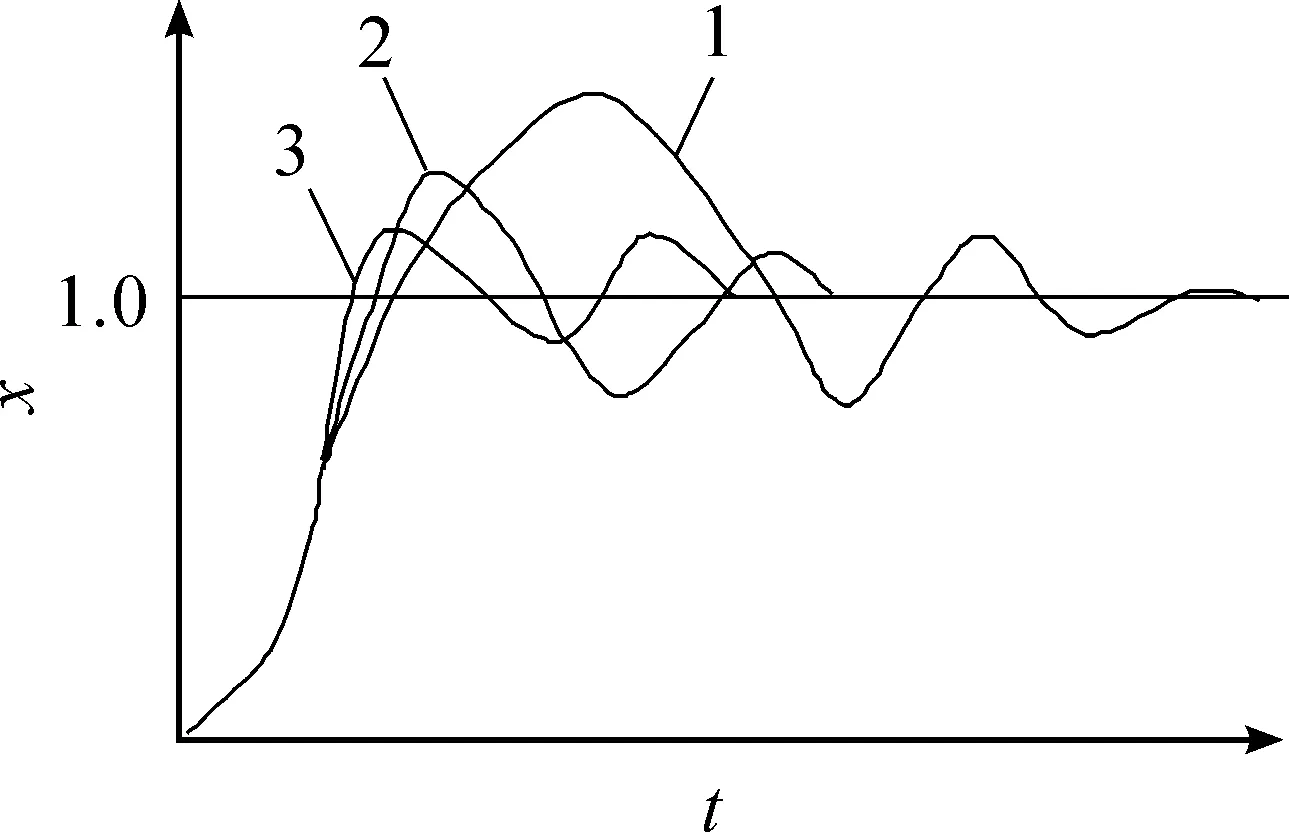
图8 输入为单位阶跃的伺服系统的响应曲线
4 结束语
本文设计了采用伺服电机驱动、蜗轮蜗杆传动的高精度伺服转台的控制系统。由于ARM微控制器控制能力强,该系统采用速度内环、位置外环的双闭环控制模式,对转台位置误差进行专家PID控制,以提高伺服系统的响应速度,具备实现精确运动控制的能力。实验结果表明:该转位置伺服精度在-0.8″~1.2″范围内,控制系统速度阶跃响应好,运行稳定,速度变化范围小。
本控制系统具有操作方便、可升级性强等特点。基于ARM的数字位置环控制器可根据系统需要修改控制参数和控制方法,如果跟嵌入式系统相结合可以提高系统的实时性,如果采用更高分辨率的位置检测器件,能够进一步提高伺服系统的精度。
[1] 吴柏林.抓住战略机遇 转变增长方式 为振兴装备制造业当好先行军[J].世界制造技术与装备市场,2006(5):27-31.
[2] 刘耀阳.数控转台核心技术研究[J].机械制造,2014(6):71-73.
[3] 杨毅,苏宝库.高精度伺服系统的非线性校正[J].哈尔滨工业大学学报,2001,33(3):406-409.
[4] 汪临伟,彭雪峰,殷侠.单神经元三轴转台控制系统设计的三种[J].液压与气动,2011(5):13-15.
[5] 刘伯春.智能PID调节器的设计及其应用[J].电气自动化,1995(3):18-21.
[6] 王耀南,刘治.智能PID调节器在工业对象中的应用[J].自动化仪表,2001,22(5):23-25.
[7] 陆毅华,张宪民.二维精密定位系统误差分析与补偿[J].机械设计,2009,26(1):59-62.
[8] TORMEY D.Using PWM servo amplifiers in noise-sensitive applications:Digital PWM servo amplifiers are smaller, more efficient,less expensive,and easier to use than their linear counterparts[J].Electrical Design News,2005,50(25):113-114.
(责任编辑 陈 艳)
Servo Turntable Control System Design Based on ARM
WANG Hao-jin, LI Jiu-long
(Detection Department, Nanjing Institute of Artillery, Nanjing 211132, China)
In order to improve the system position accuracy servo turntable control system, control system is designed. The control system, with ARM (LPC2124) as the control core, rotating transformer as turntable displacement detection components, adopts the double closed-loop control structure (speed loop and position loop), and speed loop is realized with analog, digital quantity to realize the position loop. Hardware is composed of the power supply circuit, RS232 communication, motor drive, servo system, etc. Position error can be obtained through comparing the measured position and theoretical position, adjusting the expert PID parameters. The experimental results show that the precision of position servo is within -0.8″~1.2″, and the motion is stability, so the system provides accurate positioning servo turntable control.
rotating transformer; ARM; double closed-loop; expert PID controller
2017-03-08
王颢锦(1994—),男,甘肃武威人, 主要从事数控机床研究,E-mail:414811876@qq.com。
王颢锦,李久龙.基于ARM的伺服转台控制系统设计[J].重庆理工大学学报(自然科学),2017(6):179-183.
format:WANG Hao-jin, LI Jiu-long.Servo Turntable Control System Design Based on ARM[J].Journal of Chongqing University of Technology(Natural Science),2017(6):179-183.
10.3969/j.issn.1674-8425(z).2017.06.027
TP216
A
1674-8425(2017)06-0179-05
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
微特电机(2020年11期)2020-12-30
科技与创新(2018年1期)2018-12-23
测控技术(2018年12期)2018-11-25
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
工业设计(2016年6期)2016-04-17
北京航空航天大学学报(2016年4期)2016-02-27
