基于分段PID方法的非线性负载电机的转速控制
2017-07-31 18:46任思岩郝艳鹏张晨曦侯一雪
电子工业专用设备 2017年3期
任思岩,郝艳鹏,张晨曦,侯一雪,王 雁
(中国电子科技集团公司第二研究所,山西 太原 030024)
基于分段PID方法的非线性负载电机的转速控制
任思岩,郝艳鹏,张晨曦,侯一雪,王 雁
(中国电子科技集团公司第二研究所,山西 太原 030024)
提出了基于分段PID的非线性负载电机的转速控制方法,在不增加成本的前提下,该方法克服了单段PID控制无法满足负载大幅度变化导致的系统不稳定性,并有效降低了非线性负载结构的震动情况。这使得自动化设备的精度等级提高到微米级,极大地改善了自动化设备的生产能力水平。
分段PID;非线性负载;电机转速
近年来电机在自动化工业中得到广泛的应用,特别是对一些调速性能要求较高的场合。尽管应用领域各有不同,转速仍然是其主要的控制参数。目前转速控制算法多采用PID算法,PID算法已非常成熟,容易实现,控制性能好,且能很好地消除稳态误差,而控制性能的效果主要取决于PID控制参数的选取。但工业过程控制中,被控对象会受到来自各种渠道的干扰和影响,例如结构的变化,负载的变化,这些干扰和影响可能导致过程特性的变化,这往往会造成整个机械结构产生过度的震动,从而影响高精度作业(如微米级或亚微米级)的稳定性,因此要求系统根据运行状态自动整定P、I、D参数,使系统始终运行在一个较好的工作状态。为此,本文针对非线性负载的情况利用分段PID方法对电机的转速进行控制。与单一PID控制系统相比,该方法有效地降低了在负载产生急剧变化的情况下,由于PID的单一无法同时适应高负载和低负载而产生的稳态误差。
1 电机转速的PID控制
1.1 PID控制基本原理
PID控制即比例(Proportional)、积分(Integrating)、微分(Differentiation)控制。它是一种线性控制器用输出y(t)和给定量R(t)之间误差的时间函数,即:E(t)=R(t)-y(t)。如图1所示。
比例调节的作用:减小误差,但比例系数过大会减低系统稳定性。
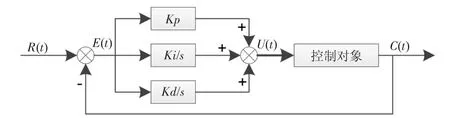
图1 PID控制算法框图
积分调节的作用:消除静态误差,但积分系数过大会减慢动态响应,减低系统稳定性
微分调节的作用:改善系统动态性能,提高稳定性,但微分系数过大会降低系统抗干扰能力。
1.2 非线性负载运动系统分析
在“工业4.0”概念火热的今天,全自动化的工业设备作为实现“工业4.0”的基本单元,已经开始全面替代传统的手动、半自动工业设备。为适应生产工艺要求,全自动设备的机械结构中往往会出现一些非线性负载结构,如图2所示,这种凸轮结构就是一种典型的非线性负载结构。
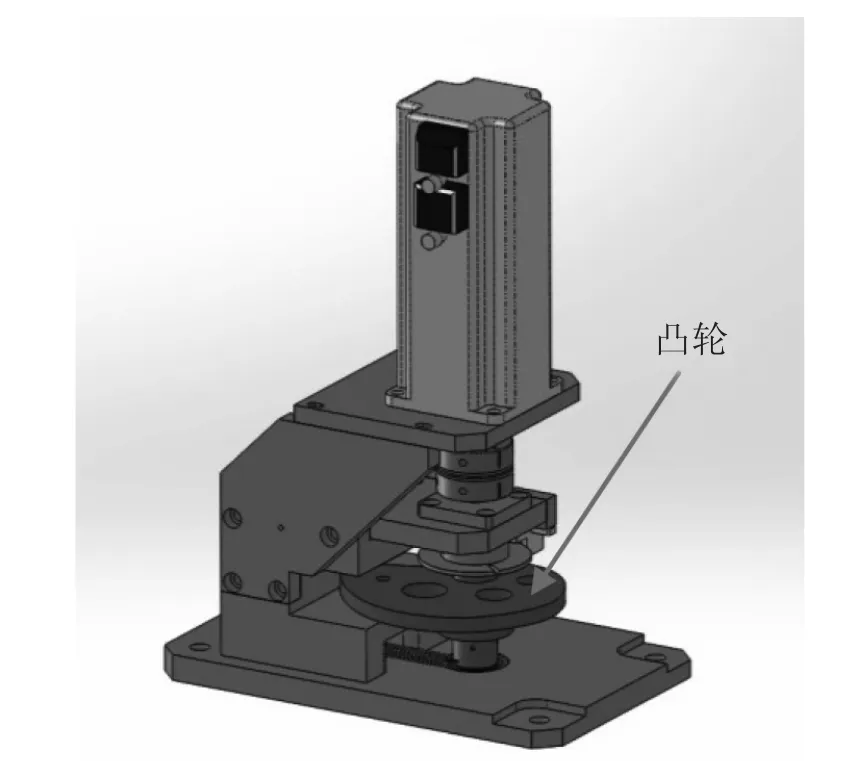
图2 凸轮结构
转动惯量计算公式:

根据公式(1),可以计算出图3中的凸轮最高点与最低点之间的转动惯量之比为9.97,接近10倍。
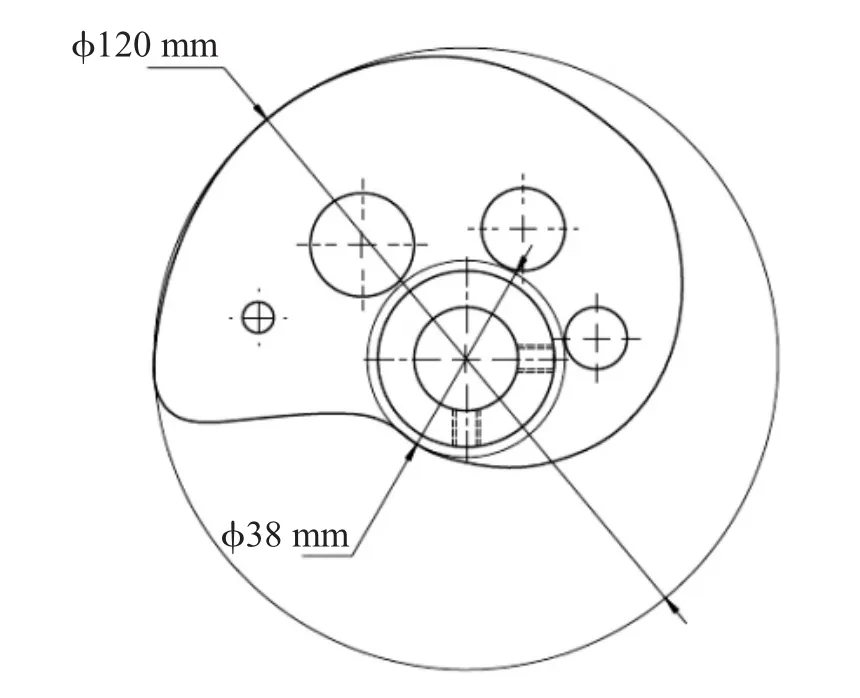
图3 凸轮工程图
1.3 分段PID控制电机转速
若使用同一组PID参数对电机转速进行控制,则很难同时使得在凸轮最高点附近和最低点附近的运动都具有良好的稳定性,因此整个系统将产生较大的震动,从而影响整个自动化设备的精度以及稳定性。实验结果如表1所示,分别对3组实验数据计算,中心值分别为:1.250 7 mm,1.676 mm,1.239 1 mm;3σ误差分别为:0.138 6 mm,0.095 7 mm,0.124 3 mm。因此单段PID控制方法的误差范围在±100 μm。
通过将整个凸轮的运动分解为2段,甚至更多段,每一段采用不同的PID进行控制,发现在每一小段当中,电机转速控制的更加稳定,大幅度减
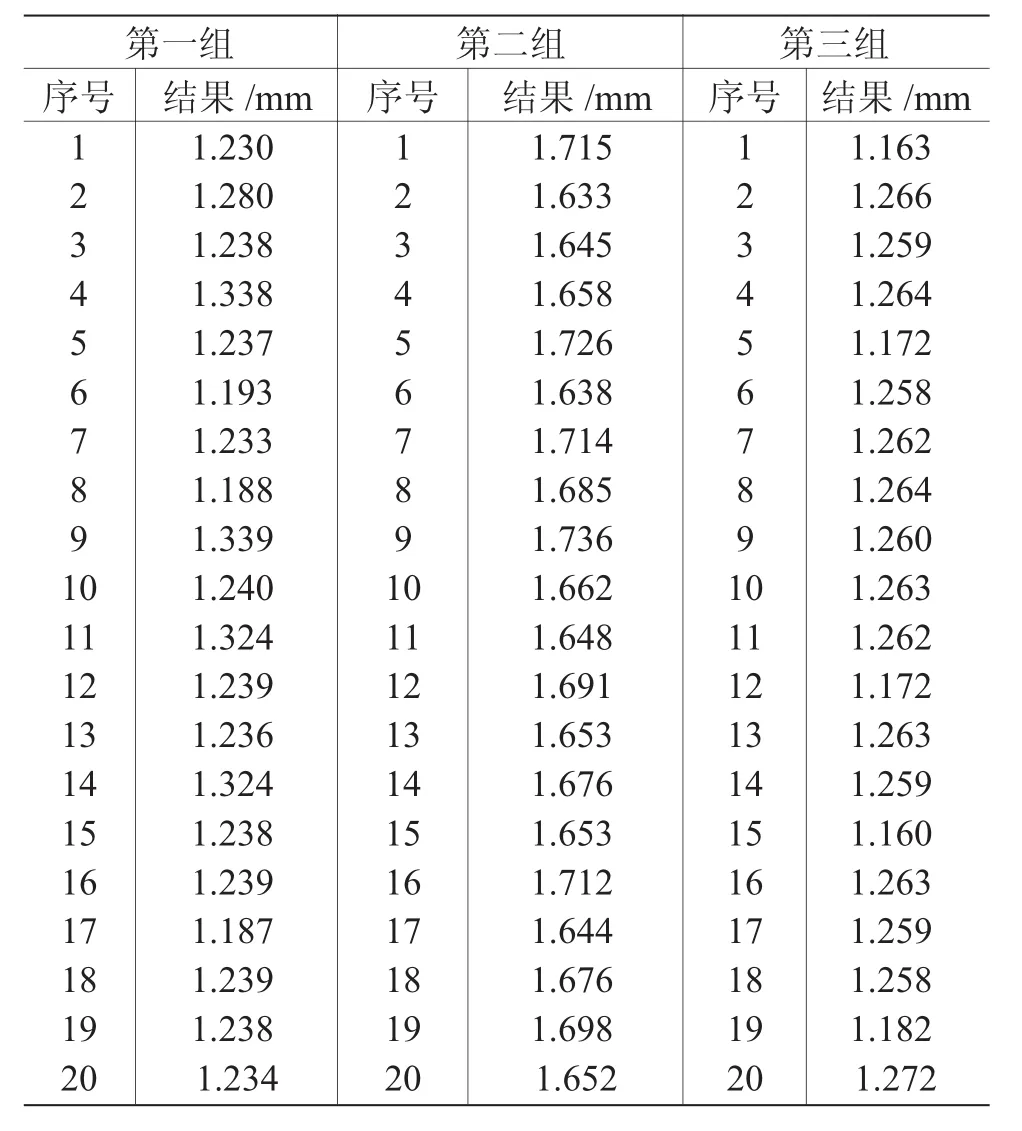
表1 单段PID控制震动幅度
2 结 论
综上所述,根据表1以及表2的结果对比,利用分段PID的方法控制电机的转速,有效地提高了在非线性负载的情况下系统的稳定性,将震动幅度减小了一个数量级,有效地提高了全自动设备的精度等级,从而使得设备在不增加任何成本的前提下可以满足微米级生产任务的使用要求,有很高的应用价值。小了整个架构的震动情况。实验结果如表2所示,分别对3组实验数据计算,中心值分别为:1.272 mm,1.258 mm,1.251 mm;3σ误差分别为:0.009 2 mm,0.009 0 mm,0.009 2 mm。因此单段PID控制方法的误差范围在±10 μm。
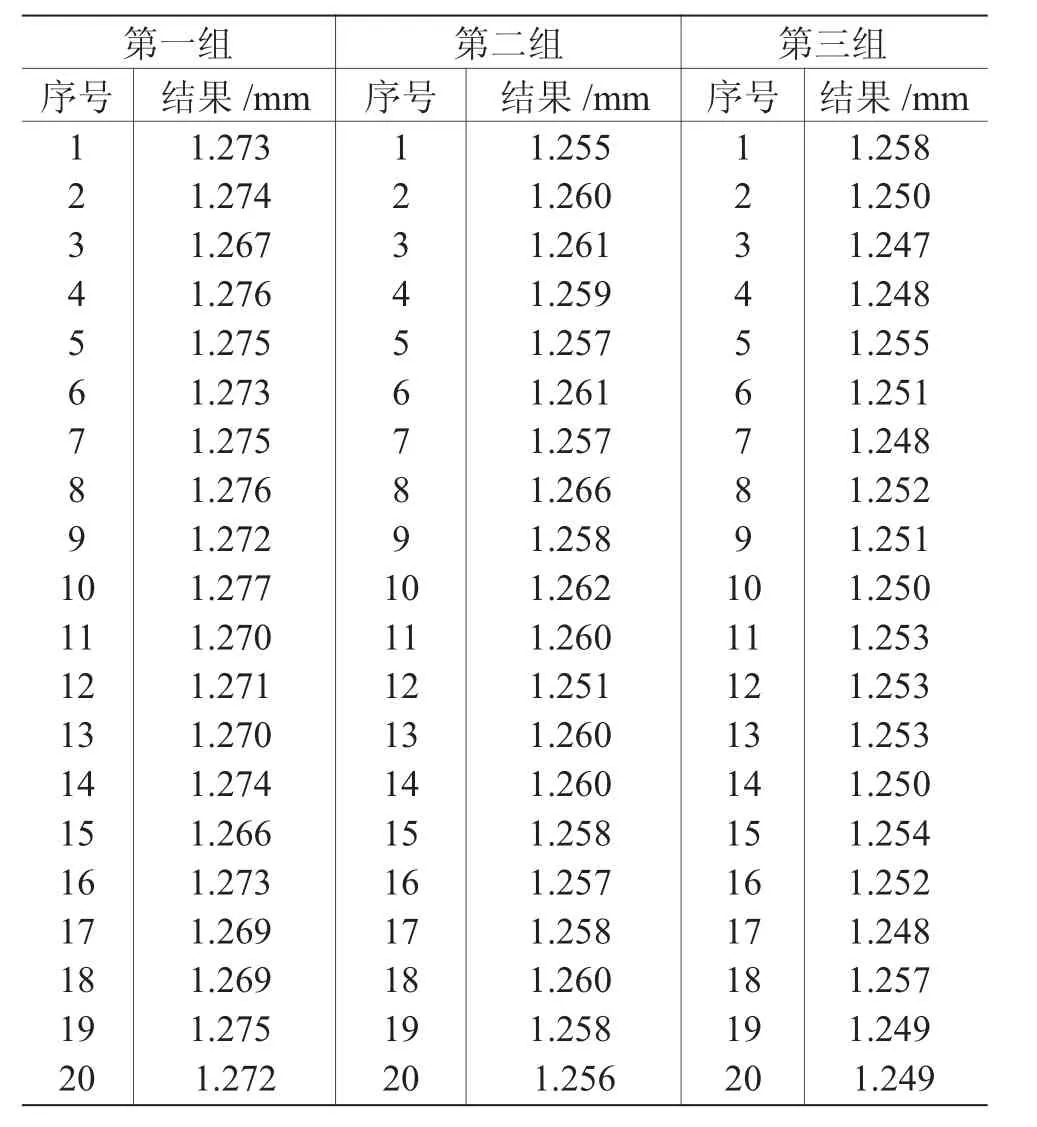
表2 分段PID控制震动幅度
[1] 株式会社,安川电机.机器控制器MP900/MP2000系列用户手册-运动程序篇[Z].2004.
[2] 株式会社,安川电机.机器控制器MP900/MP2000系列用户手册-运动程序篇[Z].2004.
[3] 株式会社,安川电机.Σ-7S伺服单元产品手册[Z].2014.
[4] 申辉阳,申栋梁.封闭式液位控制系统的PLC分段PID控制方法[J].机电工程技术,2012,41(2):31-33.
[5] 董丽荣,董文智.基于模糊-PID复合控制算法的电机转速控制[J].包头职业技术学院报,2010,11(3):12-14.
A Segmentation PID Control-method of Motor Speed for Solving Nonlinear Load System
REN Siyan,HAO Yanpeng,ZHANG Chenxi,HOU Yixue,WANG Yan
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
In this paper,a segmentation PID control-method of motor speed for solving nonlinear load system were given.Under the premise of without any increase in costs the method not only avoid a situation when signal segment PID control-method can not control nonlinear load system very stable,but also obviously decrease the vibration amplitude.It makes the automation's precision grade up to micron level and improve the automation's level of production capacity greatly.
Segmentation PID;Nonlinear load system;Motor speed
TM301.2
B
1004-4507(2017)03-0063-03
2017-04-10
猜你喜欢
冶金动力(2020年12期)2021-01-04
科学大众(2020年12期)2020-08-13
文萃报·周二版(2020年23期)2020-06-19
爆炸与冲击(2019年8期)2019-09-25
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
中国公路(2017年18期)2018-01-23
制造技术与机床(2017年5期)2018-01-19
山东工业技术(2015年24期)2015-12-10
学周刊·下旬刊(2015年10期)2015-07-22