
机载环境下组合设备转动惯量和惯性积计算方法
2017-08-09 09:54王斌
环境技术 2017年3期
王 斌
(中国电子科学研究院,北京 100041)
机载环境下组合设备转动惯量和惯性积计算方法
王 斌
(中国电子科学研究院,北京 100041)
在机载环境下,由多个设备组合而成的大型组合设备的转动惯量和惯性积测量困难。比较简单的方法是得到其中每个设备的转动惯量和惯性积后,利用公式计算得出组合设备的转动惯量和惯性积。对设备旋转和平移时惯性张量的转换矩阵进行了完善和推导,使其适应机载三维环境。此外,对几个特例进行了说明,为计算组合设备的转动惯量和惯性积提供了公式依据。
机载环境;转动惯量;惯性积
引言
转动惯量和惯性积是物体做转动时其惯性的度量。对于飞机来说,飞机的转动惯量和惯性积是载荷计算、操稳特性分析和气动弹性分析不可缺少的数据。飞机转动惯量和惯性积的大小取决于机身及机载设备的质量分布和转动时所对应的转动轴位置。
大型组合设备经常由多个小设备组成,组合设备一般形状不规则、质量分布不均匀。在工程上,对于组合设备,其转动惯量和惯性积通常采用实验的方法得出。例如使用扭摆法、落体法、三线摆法和复摆法等测量转动惯量。对于惯性积直接测量有困难,但也可以通过对不同角度下转动惯量进行实验的方式推导出[1]。
以上方法需要做实验,周期长,费用大,并且有时不具备实验条件。通过对组合设备中各个小设备转动惯量和惯性积进行计算得出组合设备的转动惯量和惯性积更加方便使用。本文对使用公式计算组合设备转动惯量和惯性积的公式进行推导和完善。
1 转动惯量和惯性积
机载环境下组合设备设计时,需要的转动惯量参数通常有:以全机坐标系(或本体坐标系)三个坐标轴的转动惯量Ix、Iy、Iz和惯性积Ixy、Iyz、Ixz,其单位为kg·m2。
飞机总体设计人员收集各个承制厂家设备的惯性积和惯性积,进而计算出全机或者大型组合设备的转动惯量和惯性积。
2 需要使用公式的推导
2.1 惯性张量的引入
对于质点系组成的刚体,其对某点O的动量矩为:

其中:
L为动量矩;
mi为每个质量单元的质量;
ri为每个质量单元距离;
ω为刚体的角速度。
式 (1)用矩阵形式表示为:

其中:
I为惯性张量,其为一个由9个分量构成,表示刚体定点转动惯性的量值。
如令:

则I可以表示为:

其中,Ix、Iy和Iz称为转动惯量,Ixy、Iyx和Ixz称为惯性积。
2.2 坐标系的平移对转动惯量和惯性积的影响
一般地,相对于设备自身上某个点的惯性张量很容易得到,但多个设备组合安装在一起时,经常会需要计算某个设备相对于另一个设备所在坐标系的惯性张量。一般地,两个设备间坐标轴方向相同,区别在于原点不同,此时相当于求解坐标系的平移对惯性张量的影响。
如图 1所示,假设质点系组成的刚体位于参考坐标系Ox1y1z1,此时坐标系平移(x0y0z0),形成新的坐标系为Ox2y2z2。
则此时在Ox1y1z1坐标系内,惯性张量矩阵I2表示为:

将式(6)中I2x分项展开:


以此类推可得I2y和I2z的表达式。
将式(6)中I2xy分项展开:

注意式(9)中,I1xy=-∑mixiyi,同时如果将O点选择在质心位置,则有∑mixi=0和∑miyz=0,则式(9)变为:

以此类推可得I2y2和I2x2的表达式。
则式(7)得:
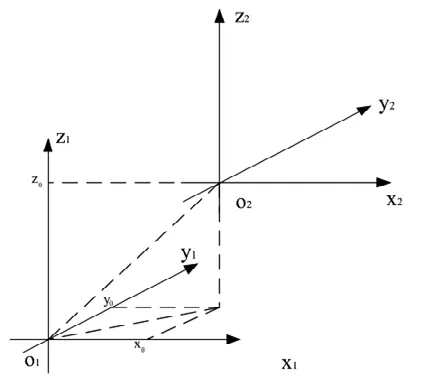
图 1 坐标系平移

其中m为刚体总质量,注意上式成立的条件是原坐标系原点O选择在质心位置。可以得到以下结论:刚体所在坐标系平移时,新坐标系下的惯性张量可以通过刚体在以质心为原点的参考系下的惯性张量求得。
2.3 坐标系的旋转对转动惯量和惯性积的影响
同样,设备在飞机上安装时经常需要旋转一个角度安装,会需要计算某个设备相对于一个旋转的坐标系的惯性张量,一般地,两个坐标系之间共原点,坐标轴之间相差某个角度,此时相当于求解坐标系的旋转对惯性张量的影响。
对此情况,文献[2]中给出了转换矩阵。
如图 2对于任意两个共原点的直角坐标系Ox1y1z1和Ox2y2z2。可以证明,Ox1y1z1可以通过三次绕其坐标轴的旋转变换得到Ox2y2z2,每次转过的角称为欧拉角。例如,Ox1y1z1首先绕1z轴转动角ψ形成新的坐标系Ox1yaza,再沿着ay轴转动角θ形成新的坐标系Ox2yazb,再沿着x2轴转动角φ形成新的坐标系Ox2y2z2。
由旧坐标系Ox1y1z1到新坐标系Ox2y2z2的转换矩阵见式(12)。

注意上式与旋转顺序有关,上式中旋转顺序是z-y-x,实际上旋转顺序共有12种。尽管最终的状态一样,但是不同的转动顺序对应不同的的欧拉角和不同的转换矩阵。
而惯性张量的转换关系为:

2.4 物体对任意轴的转动惯量和惯性积
两个坐标系之间的关系均可以表达为其中一个坐标系先平移至于另一个坐标系共原点,然后再旋转至与另一个坐标系同轴。则在一个坐标系下的物体相对于另一个坐标系的惯性张量也可以通过先平移再旋转的转换矩阵得出。
3 特例
3.1 参考系坐标轴方向变化
3.1.1 改变单个坐标轴方向
实际应用中,有时设计软件参考系与全机参考系不一致,需要改变参考系中单轴方向。如图 3所示,假设需要将x轴方向反转。
则转动惯量和惯性积关系见式(14)。


图 2 坐标系旋转

图 3 改变单个坐标轴方向
3.1.2 交换坐标轴方向
实际应用中,有时设计软件参考系与全机参考系不一致,需要交换两个坐标轴方向。如图 4所示,假设需要将y轴和z轴互换方向。
则转动惯量和惯性积关系见式(15)。

3.2 相对坐标轴位置变化
3.2.1 平面对称安装
设备实际安装中,有时需要平面对称安装。如图 5所示,假设对称平面为xz平面。
则转动惯量和惯性积关系见式(16)。

3.2.2 轴对称安装
设备实际安装中,有时需要轴对称安装。如图 6所示,假设对称轴为z轴。
则转动惯量和惯性积关系见式(17)。

3.2.3 点对称安装
设备实际安装中,有时需要轴对称安装。如图 7所示,假设对称点为O点。

图4 交换坐标轴方向

图5 平面对称安装

图6 轴对称安装

图7 点对称安装
则转动惯量和惯性积关系见式(18)。

4 转动惯量和惯性积的叠加
实际中经常遇到的情况是多个子设备组合为一个组合设备,其中每个子设备在各自参考系下可以得出各自的重心位置、转动惯量和惯性积,此时可以要求每个子设备给出各自重量、重心位置、转动惯量和惯性积,再通过公式求得组合设备的转动惯量和惯性积。如式(19)所示,文献[3]给出了一个求解组合设备转动惯量和惯性积的公式,但是其中各项物理含义和参考系关系不太明确,在此予以明确。

其中:Ix、Iy和Iz为组合设备的转动惯量,参考系原点位于组合设备的重心,单位为kg·m2;
Ixy、Iyx、Ixz为组合设备的惯性积,参考系原点位于组合设备的重心,单位为kg·m2;
Ixi、Iyi和Izi为子设备i的转动惯量,参考系原点位于子设备i的重心,单位为kg·m2;
Ixyi、Iyxi、Ixzi为子设备i的惯性积,参考系原点位于子设备i的重心,单位为kg·m2;
Wi为子设备i的重量,单位为kg;
Xi、Yi、Zi为子设备i的重心坐标;
X、Y、Z为组合设备的重心坐标。
注意计算时各子设备的转动惯量和惯性积的参考系原点为各自重心,各子设备的坐标系轴的指向应调整为一致,组合设备的转动惯量和惯性积的参考系原点为组合设备重心,坐标系轴的指向与各子设备的坐标系轴的指向相同。
组合设备的重心的计算通过式(20)得出。

注意计算时各单元的重心位置坐标系需要统一,组合设备的重心位置结果在同一坐标系下。
5 结束语
综上所述,组合设备的转动惯量和惯性积,可以根据本文中推导的公式,以子设备的重量、重心位置、重心转动惯量和重心惯性积作为输入计算给出。
[1]吴斌,杨全洁.用扭摆法测量导弹惯性积的误差分析[J].弹箭与制导学报, 2005,25(4):153-155
[2]肖业伦.航空航天器运动的建模——飞行动力学的理论基础[M].北京: 北京航空航天大学出版社, 2003.
[3]飞机设计手册总编委会.飞机设计手册第8册:重量平衡与控制[M].北京: 航空工业出版社, 1999.
王斌,男,(1982-),北京,工程硕士,工程师,飞行器设计专业,主要从事电子设备装机适配性相关技术研究工作。
Method for Calculating Moments and Products of Inertia of Large Assembly Under Airborne Circumstance
WANG Bin
(China Academy of Electronics and Information Technology, Beijing 100041)
It is difficult to measure the moments and products of inertia of large assembly, which is consist of several parts, under airborne circumstance. The simple way is to calculate the moments and products of inertia of large assembly to obtain the moments and products of inertia of every part. Previous expressions of transformation matrix of matrix of inertia, under parallel moving and rotation moving, are extended to improve the compatibility with airborne circumstance. Furthermore, certain transformation matrices were developed under special cases. This paper provides equation basis for calculating moments and products of inertia of large assembly.
airborne circumstance; moments of inertia; products of inertia
V219
A
1004-7204(2017)03-0026-05
猜你喜欢
河南科技(2023年1期)2023-02-11
Chinese Physics B(2022年5期)2022-05-16
广东石油化工学院学报(2022年1期)2022-03-25
数理化解题研究(2021年34期)2021-12-26
黑龙江交通科技(2020年5期)2020-01-13
新课程·下旬(2018年7期)2018-01-19
中学物理·高中(2016年1期)2016-05-26
中学生数理化·高二版(2016年7期)2016-05-14
肇庆学院学报(2016年5期)2016-03-11
新高考·高一物理(2015年5期)2015-08-18
