
基于Matlab的自适应控制技术在车辆制动中的应用
2017-08-09 02:05陶红艳余成波
重庆理工大学学报(自然科学) 2017年7期
杨 亚,陶红艳,余成波
(重庆理工大学 a.机械工程学院; b.远程测试与控制技术研究所, 重庆 400054)
基于Matlab的自适应控制技术在车辆制动中的应用
杨 亚a,陶红艳a,余成波b
(重庆理工大学 a.机械工程学院; b.远程测试与控制技术研究所, 重庆 400054)
针对汽车在制动环节中的纵向稳定性问题,根据其受力情况,建立了1/4车辆单轮模型,并在对传统控制器模型特点进行分析的基础上,优化设计了基于参数自适应的模糊PID控制器模型。利用Matlab针对不同控制方法进行仿真分析,结果显示:改良后的模糊PID控制器模型在其鲁棒性、控制精度、反应灵敏度、智能控制化方面有着较为明显的优势。这为进一步改进该控制器模型的模糊规则与控制算法方面提供了一定的参考。
防抱死制动;滑移率;自适应模糊PID控制
中国经济持续稳健的增长,极大程度上提升了老百姓的收入水平。而且中国科技与工业产业技术的不断发展,也日渐提高了汽车生产质量与工艺制造水平。经济与科技相互作用,一定程度上增加了汽车在居民生活当中的流通量。汽车购买量的增加在方便我们出行的同时,却也给社会带来了一系列交通问题。在各类汽车交通事故中,刹车制动问题是引起的交通事故的主要原因。给汽车安装防抱死(ABS)制动系统则是提高汽车制动安全系数的有力保证[1]。在汽车制动过程中,ABS制动系统可以提高车轮与地面的摩擦力,提高刹车过程中的鲁棒稳定性,缩短刹车距离。因此,汽车配置防抱死制动系统可以在一定程度上降低交通事故的发生率。
对于汽车防抱死制动系统而言,选择合理的控制方法与算法是车辆制动领域的重点研究方向。复杂多变的路面环境使得汽车制动系统的控制算法难以利用线性数学模型进行控制计算。
随着国内外专家学者在汽车制动领域中的研究层次的不断深入,涌现出了以经典控制理论为核心的最优控制、自适应控制、非线性控制等方法。而利用经验学习判决知识,又产生了模糊控制、神经网络控制等基于现代控制理论的控制方法。其中PID控制简单实用,控制精度也较好,但是其鲁棒性较差。而模糊控制由于其本身不需要知道被控对象的具体的数学模型,对误差有着较强的抗干扰能力,能够实现对不确定对象与非线性对象的控制,类似于系统的智能判决者,使其在汽车制动控制系统中的应用具有广阔的前景。只是面对系统自身的一些不确定性因素所带来的误差[2],普通的模糊控制方法难以有效去除,控制精度不高。
通过分析汽车在纵向制动过程中的受力情形,比较各控制方法在汽车制动过程中的作用与缺陷,在传统控制方法的基础上,改良设计了基于参数自适应的模糊PID汽车控制器模型。它结合模糊控制的高鲁棒性与PID控制的高精度的优势,不仅优化了系统对制动过程的响应特性,也改善了汽车对路面的识别制动能力,提高了汽车制动安全系数,缩短了汽车纵向制动距离。
1 车辆制动模型
对于车辆的纵向制动,常见的车辆模型主要有四轮车辆模型、双轮车辆模型、单轮车辆模型。为简化汽车制动力模型并且能够反应汽车在制动过程中的动态过程变化,建立了双轮制动模型,如图1所示。
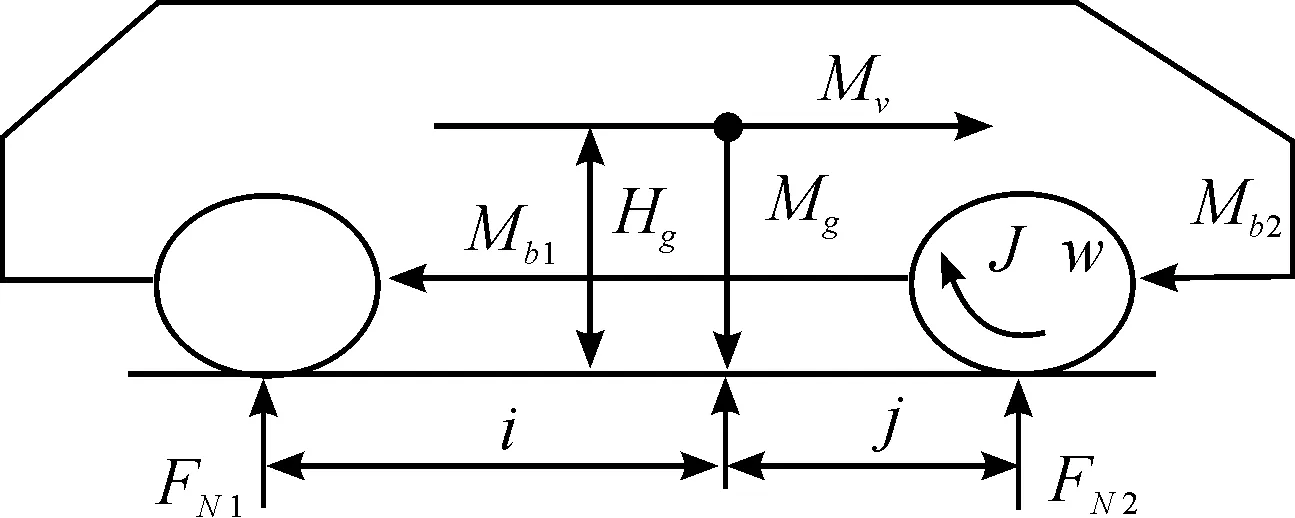
图1 双轮车辆模型
模型如下:
(1)
其中:FN1、FN2分别代表前后轮纵向摩擦力;Mb1、Mb2代表两轮制动力矩;μ1、μ2代表地面附着系数;i、j代表前后轮到质心距离;Hg代表质心到地面高度;J、w代表前后轮的转动惯量与角速度。
由于本文研究的重点主要针对汽车纵向制动,而不考虑驱动问题,因此在双轮汽车制动力模型的基础上,忽略空气阻力与车轮滚动阻力,建立起单轮车辆模型,称之为1/4车辆模型。结合力学知识可得:
(2)
(3)
(4)
(5)
其中:M为车辆质量;v为车辆初始速度;Fs为轮胎所受到的摩擦力;J轮胎的转动惯量;R为汽车的车轮半径;A*为制动因数;Mb为制动力矩。而对于轮胎模型,本研究采用经验模型。它是通过大量的轮胎实验数据分析[34],把车轮制动力的变化通过参数拟合,以数学形式表达出来。在各拟合方法当中,尽管魔术公式在处理轮胎受力特性中的拟合精度较好,但是计算量比较大。综合以上原因,本研究采用一种简化的双线轮胎模型,通过滑移率与附着系数的关系来表现轮胎的制动力特性。

(6)
其中: μg为车轮抱死情况下的滑移系数; φopt为轮胎最佳滑移率;φ为车轮制动过程中的动态滑移率。在基于滑移率的研究过程当中,对于制动系统的建模主要是针对液压传动部分。对于该液压系统中的电磁阀与液压缸[5]等汽车防抱死的重要组成部分的建模较为困难。结合汽车动力学力学相关知识,将所建立液压系统的模型简化为一个比例积分环节。
(7)
制动力矩计算方法如式(5)所示。
2 自适应模糊PID控制器设计
我们研究设计模糊PID自适应控制方法的初衷在于充分利用模糊控制的较高的鲁棒性,并借助该方法提高对系统较大误差的抑制作用。而对于误差较小的情况,由于模糊控制的精度太低,这就需要利用PID模型去控制。传统的模糊PID还需要考虑控制器的切换,当选定的数值大于预设值时切换到模糊控制器作用,小于预设值时,切换到PID控制,即
(8)
其中Ce的值要根据试验才能确定[6]。各项参数的选择要考虑到防止引起较大的超调量。在参数自整定模糊PID控制方法中,对于PID控制器的设计,有增量式与位置式。
位置式亦称全局式,如果采样周期足够小,就可以获得足够精确的近似计算结果。但是该方法工作量多,对计算机内存需求也较大。考虑到计算机的硬件配置与运行速度,本研究选择占用内存较小的增量式算法PID控制器,可得如下关系式:
(9)
式中:e(k)、ec(k)为滑移偏差及偏差变化率;Kp、Ki、Kd分别为比例环节、积分环节、微分环节的系数。
对于控制器的设计,选用的是e、ec两变量作为输入变量,输出变量有3个,分别是PID控制器的微分系数、积分系数与比例系数,其关系如图2所示。
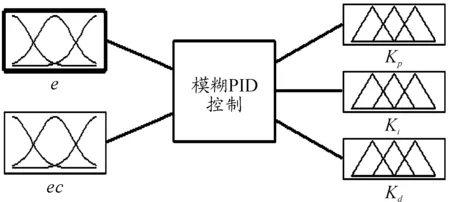
图2 模糊PID控制器
为了便于简化分析研究,在设计自适应模糊控制器的过程中,忽略电机的延迟特性,考虑到汽车制动中的各种因素的影响[7],定义误差与误差变化率的模糊论域[8]范围均为[-6,-6]。隶属度函数采用三角形,交叠系数应当控制在0.5~1之间。因为交叠系数高于1时,会出现过判断,导致多条模糊规则同时作用,这不利于解模糊过程的进行[9]。同样的,如果过低,中间甚至出现零交叠,这会导致设计的模糊控制器没有任何分辨判决能力,也就丧失了研究模糊PID的意义。因此,把误差与误差变化率的变量等级分为7级,如图3所示,分别是:正大(PM)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NM)。为了提高控制器的控制精度,在靠近零点处采用密集型模糊控制规则。
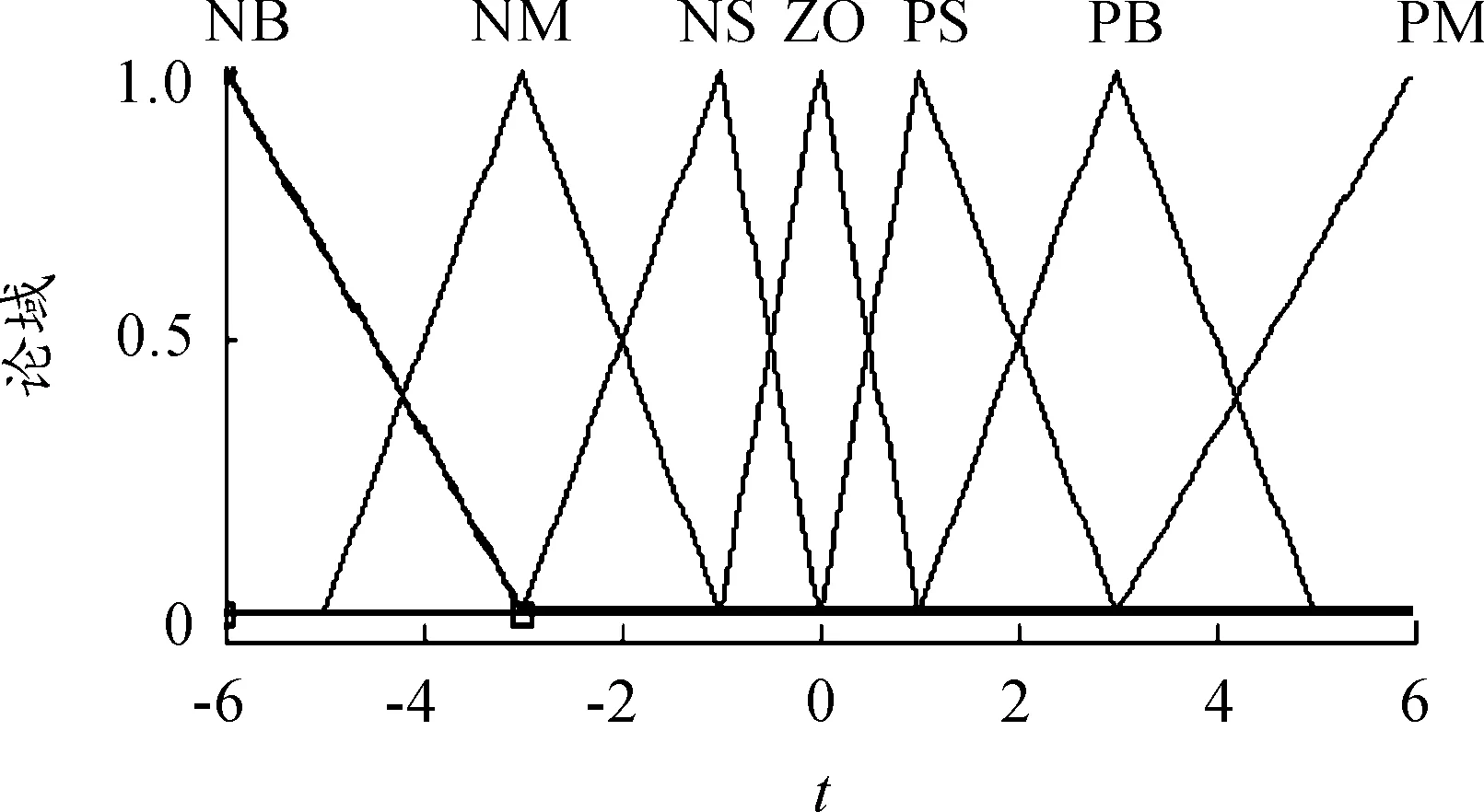
图3 误差与误差变化率的隶属度函数
对于PID的3个输出变量,设置其模糊论域为[0,1].由于三角函数的触发灵敏度较高,同样还是选择三角函数作为输出变量的隶属度函数。其语言变量分为5级(如图4所示),主要为大(B)、中(M)、小(S)、正零(O)、零(Z)。
模糊化之后,则有:
(10)
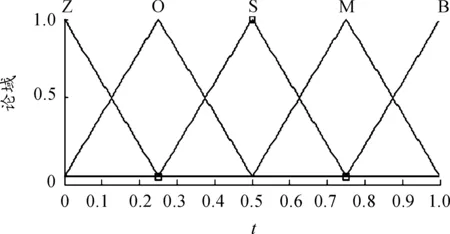
图4 输出变量的隶属度函数
参照汽车实际工作状况与相关资料[10-11],对于该模糊控制器的推理,定义如下模糊语法规则:
Ife=NB,ec=NB,Kp=M,Ki=Z,thenKd=S。
按照这种语法规则,一共制定了49条模糊判决语句,如表1所示。
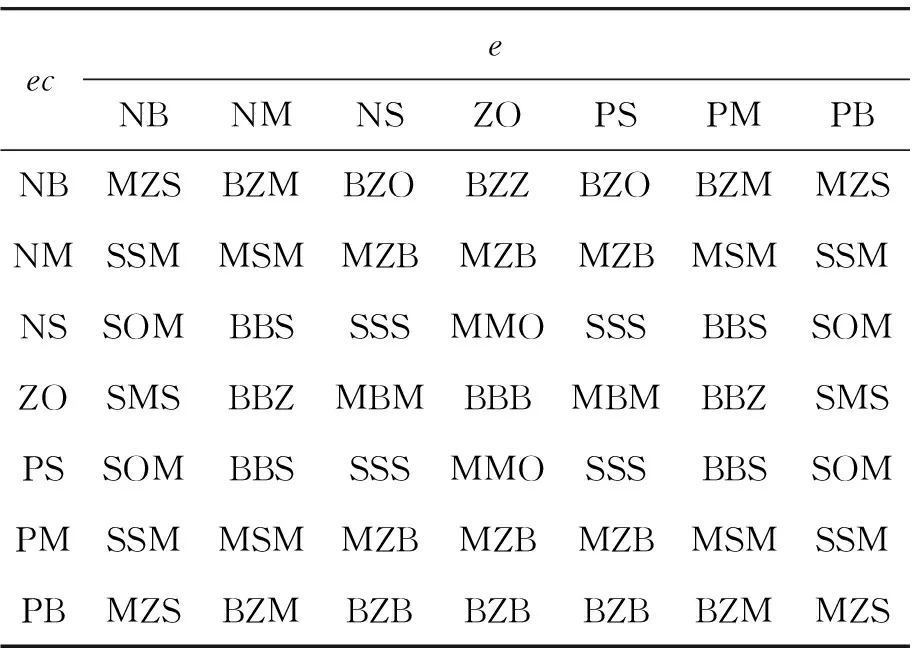
表1 模糊规则
对于模糊判决主要有重心法、最大隶属度函数法、系统加权平均法、隶属度限幅元素平均法。系数加权平均法为
(11)
系数Ki的选择要根据实际情况确定,
当选择ki=φf(xi) 时,即获得其隶属度函数,即重心法:
(12)
考虑到汽车实际刹车过程与研究的可行性,可以利用足够小的样本间隔来获得所需要的精度,而重心法相对于其他解模糊算法,不仅可以满足精度要求,而且运算起来也是十分简洁。本研究解模糊算法采用重心法[12]。可以利用该种方法分别对Kp,Ki,Kd进行解模糊判决。
3 仿真分析
在经过分析并建立相关控制器模型之后,设定的仿真参数如表2所示。
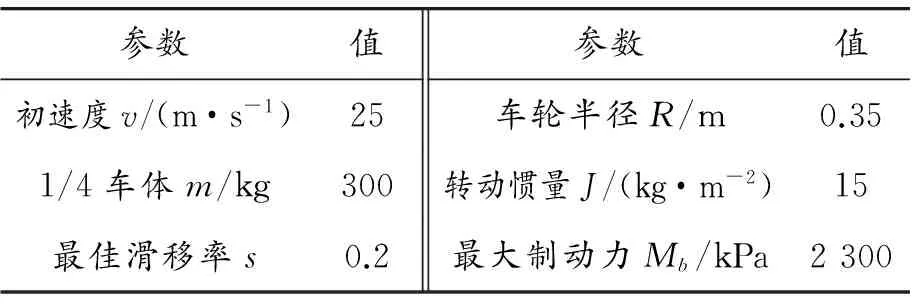
表2 汽车仿真参数
然后利用Matlab进行仿真,仿真结果如图5~7所示。
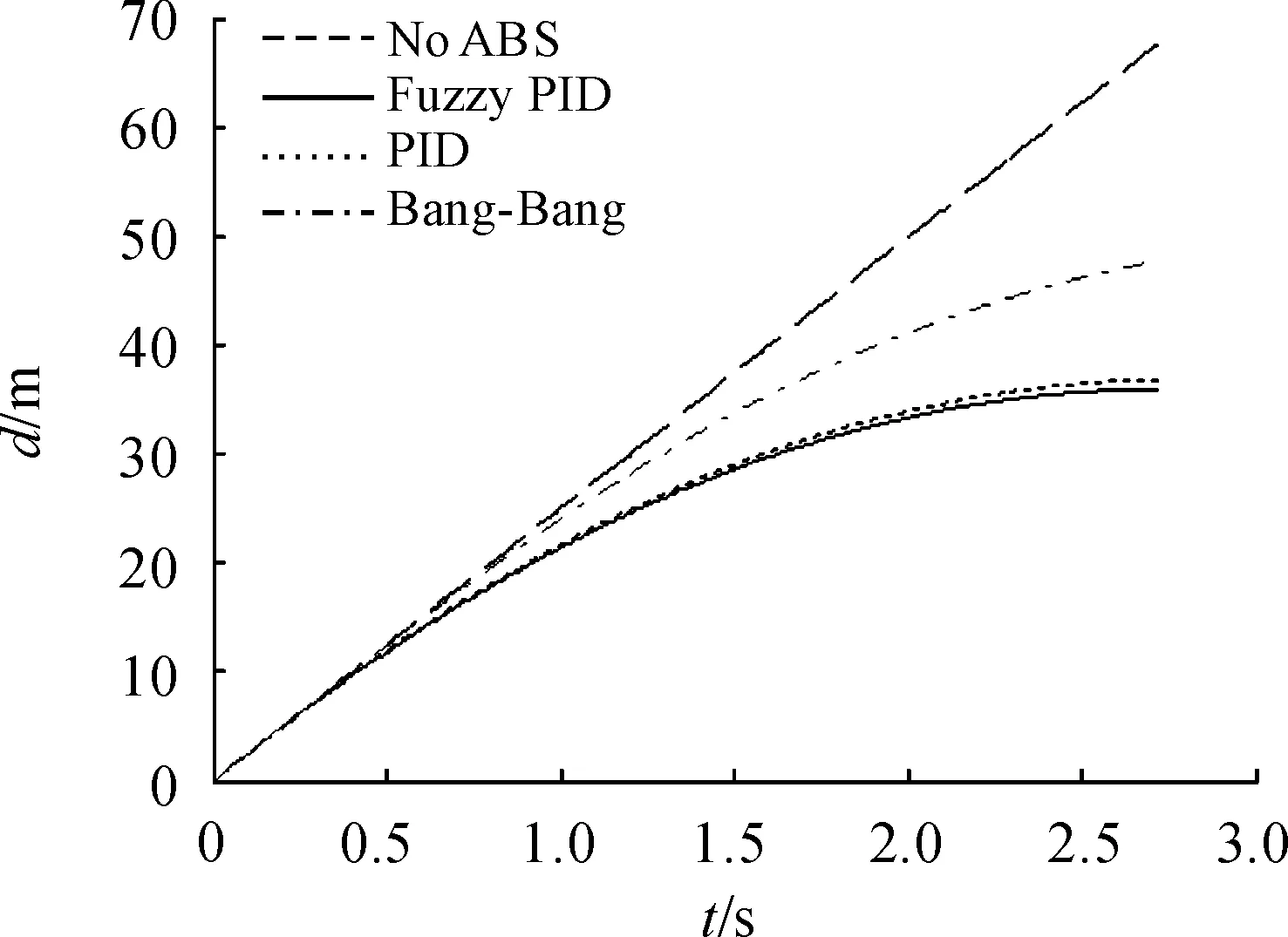
图5 不同控制器的制动距离

图6 不同控制器的制动力矩
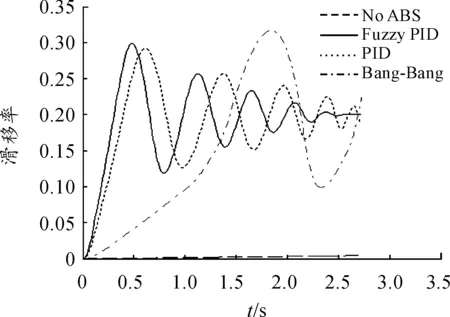
图7 不同控制器的滑移率
由以上的仿真实验曲线可以看到:无ABS制动的汽车,刹车距离最长,滑移率最低,制动力矩比具有ABS的汽车的制动力矩要小很多,使得汽车在制动过程中最终趋向于车轮抱死状态,这样既减少了汽车轮胎的使用寿命,加速了其磨损进程,也给道路交通安全埋下了隐患;而基于最优控制的Bang-Bang汽车ABS防抱死制动控制模型,相对于无ABS制动系统汽车而言,明显缩短了刹车距离,制动力矩随着刹车时间的持续上升幅度明显,滑移率也能保持在0.2附近,但是其制动力矩与滑移率的变化幅度较大,鲁棒稳定性太差。
PID控制模型的控制效果则明显优于前两者,而且它实时滑移率基本处于0.2附近,允许有小幅度波动,同样,其制动力矩达到最大制动力矩的时间也较短,这一点充分说明了该控制器模式的制动系统反应灵敏度高。但是,当面对滑移率出现一定程度的波动时,制动力矩也出现了一定幅度的波动。这也说明,基于PID控制模式的制动系统对来自滑移率引起的误差的抑制作用的抗干扰能力效果不佳。
在本文研究的4种汽车刹车控制模式中,通过Matlab的仿真结果来看,无疑是基于模糊PID控制器的刹车系统的控制效果最佳。与另外3种刹车制动模式相比,基于自适应模糊PID控制器的刹车系统刹车距离最短,制动力矩上升到最大制动力矩的时间同样也是最短,灵敏度较高。它的滑移率震荡幅度也较小,基本都处于最佳滑移率0.2附近,鲁棒稳定性较好。随着刹车时间的持续,其滑移率与制动力矩基本处于稳定状态,尽管在一定程度上还存在一定幅度的波动。
4 结束语
通过对自适应模糊PID控制器的分析设计并利用Matlab进行仿真,与其他几种汽车纵向制动控制器的控制效果进行对比分析,本文中所采用的模糊PID自适应控制器在其控制精度与鲁棒性方面明显优于其他单一控制模式下的控制系统。当然,也应当注意到,对于模糊控制器,其设计方式不是一成不变的,而且其模糊化的语法规则的制定是获得良好制动效果的保证。而且自适应模糊PID控制系统可以通过类似于智能学习的方法,依靠制定的模糊规则进行模糊判断,同时自身也能根据系统变化实时修改调整一些参数,使其达到自适应、智能化的目的。
研究过程中也存在一些问题,比如对于一些参数的设定过于理想化,难以用于处理更加复杂多变的路况环境。而且仿真结果尽管优于其他几种制动控制方法,但是其鲁棒性与灵敏度依然难以做到瞬时同步反应。下一步的研究重点是继续优化自适应模糊PID控制的语法规则与设计方法。
[1] 余志生.汽车理论[ M].北京:机械工业出版社,2001.
[2] 王慧,杨林.模糊自适应PID控制在汽车ABS中的仿真研究[J].交通运输系统工程与信息,2012(5):52-56,139.
[3] 钱兆刚,田丽,周红艳,等.汽车防抱制动系统的分数阶PID控制算法研究[J].重庆工商大学学报(自然科学版),2014 (10):29-34.
[4] 冯谣.汽车防抱死制动系统PID控制算法仿真研究[D].西安:长安大学,2014.
[5] 晏蔚光,李果,余达太,等.基于模糊PID控制的汽车防抱制动系统控制算法研究[J].公路交通科技,2004(7):123-126.
[6] 俞琳琳.复合PID-模糊控制在ABS中的应用研究[D].重庆:重庆大学,2011.
[7] 李果.车辆防抱死理论与应用[M].北京:国防工业出版社,2009.
[8] RAESIAN N,KHAJEHPOUR N,YAGHOOBI M.A new approach in Anti-lock Braking System (ABS) based on adaptive neuro-fuzzy self-tuning PID controller[C]//International Conference on Control,Instrumentation and Automation.USA:IEEE,2011:530-535.
[9] KUMBASAR T,HAGRAS H.Big Bang-Big Crunch optimization based interval type-2 fuzzy PID cascade controller design strategy[J].Information Sciences An International Journal,2014,282:277-295.
[10]孙习武.车辆防抱制动系统的仿真研究[D].合肥:合肥工业大学,2006.
[11]崔胜民.汽车系统动力学与仿真[M].北京.北京大学出版社,2014.
[12]姚占辉.汽车防抱死制动系统控制方法分析与仿真研究[D].西安:长安大学,2009.
(责任编辑 刘 舸)
Application of Adaptive Control Technology Based on Matlab in Vehicle Braking
YANG Yaa, TAO Hongyana, YU Chengbob
(a.College of Mechanical Engineering; b.Remote Testing and Control Technology Research Institute, Chongqing University of Technology, Chongqing 400054, China)
In order to save the problem with the longitudinal stability of the car in the braking process, we have established a quarter of the vehicle single-wheel model through the vehicle force. What’s more, a fuzzy PID controller model based on parameter adaptive is designed and optimized based on the analysis of the characteristics of the traditional controller models. We use the Matlab for different control methods to simulate and analyze.Finally, the results show that the improved fuzzy PID controller model has obvious advantages in its robustness, control precision, reaction sensitivity and intelligent control, which provides a certain degree of reference for further improving the fuzzy rules and control algorithms of the control model.
anti-lock brake; slip rate; adaptive fuzzy PID control method
2017-02-18
重庆市自然科学基金资助项目(CSTC2007BB3410);重庆市科技人才培养计划(新产品研发团队)资助项目(CSJ2013KJRC-TDJS40012)
杨亚(1989—),男,河南正阳人,硕士研究生,主要从事机电一体化研究,E-mail: 541093686@qq.com。
杨亚,陶红艳,余成波.基于Matlab的自适应控制技术在车辆制动中的应用[J].重庆理工大学学报(自然科学),2017(7):63-68.
format:YANG Ya, TAO Hongyan, YU Chengbo.Application of Adaptive Control Technology Based on Matlab in Vehicle Braking[J].Journal of Chongqing University of Technology(Natural Science),2017(7):63-68.
10.3969/j.issn.1674-8425(z).2017.07.009
U461
A
1674-8425(2017)07-0063-06
猜你喜欢
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
航天制造技术(2016年6期)2016-05-09
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
探测与控制学报(2015年4期)2015-12-15
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
