
航行体水下发射流固耦合效应分析1)
2017-08-12 11:57杜特专王一伟黄晨光廖丽涓
力学学报 2017年4期
杜特专王一伟黄晨光廖丽涓
∗(中国科学院力学研究所流固耦合系统力学重点实验室,北京100190)†(中国科学院大学工程科学学院,北京100049)
创刊60周年专栏
航行体水下发射流固耦合效应分析1)
杜特专∗,2)王一伟∗,†黄晨光∗,†廖丽涓∗
∗(中国科学院力学研究所流固耦合系统力学重点实验室,北京100190)†(中国科学院大学工程科学学院,北京100049)
对于水下发射过程来说,掌握水动力载荷形成机理与结构响应特征是一个亟待解决的问题.研究该问题需要考虑含相变的复杂多相流动,变约束的结构运动以及这二者之间的耦合效应.本文采用松耦合的方法,以流体求解器为主体,将自编的固体结构程序接入流体求解器中,在每个时间步长内分别对流体动力学方程和固体结构动力学方程进行求解,通过流固界面之间的数据交换实现耦合计算.其中,流体求解器基于雷诺平均纳维斯托克斯方程,采用单流体模型处理多相流问题,引入空化模型描述空化相变,采用修正的湍流模型模拟混合物的湍流效应,并采用动网格技术处理移动边界问题.航行体的刚体运动和结构振动分开求解.结构求解器采用等效梁模型描述结构的振动,通过坐标变换给出了随体坐标系下的结构振动方程,求解方法采用时域积分法.所建立的流固耦合方法不仅能够捕捉到自然空化的演化情况,还可获得航行体所受水动力、结构振动响应以及截面的弯矩,获得了实验的验证.基于该方法研究了结构刚度、发射速度对空泡溃灭与结构振动耦合效应的影响规律.结果表明,同步溃灭是影响结构载荷的主要因素,包括溃灭压力幅值,溃灭压力作用位置,以及溃灭压力与结构振动的相位关系.
流固耦合,空化,溃灭,振动,数值模拟
引言
水下发射是复杂非定常流动与变约束条件下结构响应的流固耦合问题.空泡的非稳态演化包括回射、断裂、脱落等现象[13],呈现出随机性和较宽的涨落范围.随着有关工程结构的速度更高、质量更轻,流固耦合效应越来越凸显成为保证结构可靠性的重要科学内涵.相对于实验研究,数值模拟所需要的成本较低,需要的时间周期较短,而且易于调整各种参数.因此,将能精确描述空泡演化的计算流体力学方法与结构动力学程序耦合起来进行求解,对于解决水下高速航行体结构载荷机理以及强度设计等关键工程问题,具有重要的意义.建立水下发射流固耦合计算模型对于认识真实条件下的空泡发展过程、出水溃灭特征,以及水体/航行体的耦合效应等提供了重要的手段.
对于带空化的流固耦合问题,空化现象带来了更多的困难和挑战.首先,与气动弹性等常规的流固耦合不同,空化流动包含着液态水和水蒸气,是多相、多界面的问题.除了气固界面,液固界面之间的相互作用,还需要处理气液界面的问题.其次,空化区内部压力为饱和蒸气压,空泡的非定常演化会带来载荷时空的变化[4],特别是空泡的溃灭通常会伴随高压脉冲,在短时间内对结构的作用突出.反之,结构形状的改变也会对空泡的演化造成影响[5].另外,液态水与水蒸气的密度比约为1000:1,对于空化区内外的区域附加质量差别较大[6].由于空化区的存在,结构难以用简单的湿模态或干模态来处理.由于空化流动的非定常特性,空泡的演化也导致结构无法用固定的半湿模态来模拟[78].只能每个时刻根据空泡形态对模态进行修正,这样又会大大增加计算量.
针对包含空化的流固耦合问题,主要集中于水下复合材料螺旋桨的研究.Young等[910]利用边界元方法模拟空化流动,结合有限元分析结构的变形,模拟了水轮机叶片的在空化和无空化条件下的耦合效应,并利用实验进行了验证,分析了复合材料螺旋桨的性能.Young等[11]利用二维欧拉--拉格朗日数值方法对复合材料结构在水下爆炸过程中的瞬态响应进行了研究.随着计算软件和硬件条件的不断发展,商业软件和开源程序也逐渐成为重要的研究工具.Ducoin和Young[12]运用商业软件CFX建立了二自由度的动网格模型来模拟柔性水翼的变形,分析了柔性水翼动力学的规律.任怀勋[13]基于商业软件ANSYS及脚本控制对水翼空化问题进行了流固耦合计算,分析了三维水翼在空化流动作用下的流体动力和结构载荷特性.Campbell和Paterson[14]采用开源软件Open FOAM对大变形的柔性叶片进行数值模拟,计算结果得到了实验的验证.
对于水下发射的流固耦合过程,航行体的运动形式在水下发射的3个阶段中有所不同:在出筒阶段,航行体在适配器的约束下运动;在水中航行阶段和出水阶段,航行体做大幅的六自由度刚体运动和小幅结构振动.因此水下发射是一个变约束的大位移小变形的结构响应问题,比通常的纯振动问题更为复杂.鉴于空化问题的复杂性以及耦合的实现难度,计算方面通常对流体求解进行简化,将重点放在固体结构上进行研究.陈伟民等[15]将流体对结构的作用简化为附加质量,建立了考虑流体作用力的结构动力学方程,然后利用有限元方法对方程进行了求解,给出了水中顶部带圆锥头的圆柱壳体的水弹性振动特性,附加质量系数的计算结果与试验结果吻合较好.吕海波等[16]采用三维势流理论和边界元法计算了水下航行体结构的附加质量.但是获取带空泡流体的附加质量是仍未解决的问题.乐光明[17]采用任意拉格朗日欧拉方法方法,利用商业软件LS-DYNA计算了不同条件下航行体表面压力、应力等变化.程载斌等[18]基于LS-DYNA软件建立了气、液、固等多物质耦合,开展了水下无攻角发射过程的流固耦合数值模拟.李国良等[19]利用软件NASTRAN对潜射导弹出水过程中进行了数值模拟,得到了航行体所受的冲击力和冲击力矩.张健等[20]采用多体动力学仿真方法,研究无适配器约束条件下出筒过程动载荷响应特性,并分析了发射条件对出筒动载荷的影响规律.这些简化方法计算量较小,在处理特定工程问题时具有一定优势.但对于水下发射来说,空泡的生长、发展和溃灭等非定常演化过程会对结构的运动和变形产生强烈的作用,同时也会受到结构运动和变形的明显影响.因此越来越多的学者基于成熟的商业软件,通过二次开发对水下发射流固耦合问题进行分析.
王亚东等[21]建立了导弹水下发射动态仿真模型,获得了发射过程中多相流场、弹道参数及受力的时间历程曲线.杨晓光[22]利用FLUENT软件和刚体六自由度运动模块对航行体水下发射进行了模拟,分析了发射条件以及波浪对弹道的影响.赵成佳[23]和申丽辉[24]基于FLUENT软件采用用户自定义函数和分区动网格技术实现了流体和刚体的耦合计算,并研究了尾空泡和横向来流对航行体的受力和弹道的影响.但是并未考虑空化和结构振动.秦勇[25]基于FLUENT软件和用户自定义函数航行体均压排气水下发射过程进行了模拟,分析了波浪、横流和均压排气等因素对航行体水动力特性和运动特征的影响规律.马庆鹏[26]建立了二维轴对称模型,利用MPCCI软件实现FLUENT软件和ABAQUS软件的数据交换和耦合迭代,计算得到了航行体垂直出筒过程的结构响应.王一伟[27]基于FLUENT软件和自编结构求解程序,以二维模型为研究对象,分析了水下发射过程中刚体运动和结构振动反馈对水动力的影响.
现有的研究工作对水下发射进行了建模,并获得了相应的水动力和航行体响应规律,但是在计算模型上均作了不同程度的简化:或不考虑空化相变,或不考虑结构变形,或只关注出筒阶段,对于完整的水下发射流固耦合计算仍未见公开报道.本文针对水下发射的流固耦合过程进行建模,对水下发射的水动力和结构响应特性以及出水过程中的耦合效应进行了计算分析.
1 计算方法
1.1 流固耦合方法
本文采用松耦合方法进行流固耦合计算,在每个时间步长内分别对流体域的流体动力学方程和固体域的固体结构动力学方程进行求解,通过流体域和固体域之间的界面交换数据从而实现耦合求解.根据结构求解器和数据交换方式的不同可以分为两种模式:一种是以流体求解器为主体,把自编的结构程序接入流体求解器中,流体和结构之间的数据通过内存交换,称之为“A+”模式;另一种也是以流体求解器为主体,通过调用结构求解器进行结构计算,流体和结构之间的数据通过文本交换,称之为“A+B”模式.FLUENT软件作为通用的商业求解程序,能够模拟各种复杂流动,也提供了良好的二次开发接口,因此本文选取FLUENT软件作为流体求解器,并采用“A+”模式,图1为其方案框图.
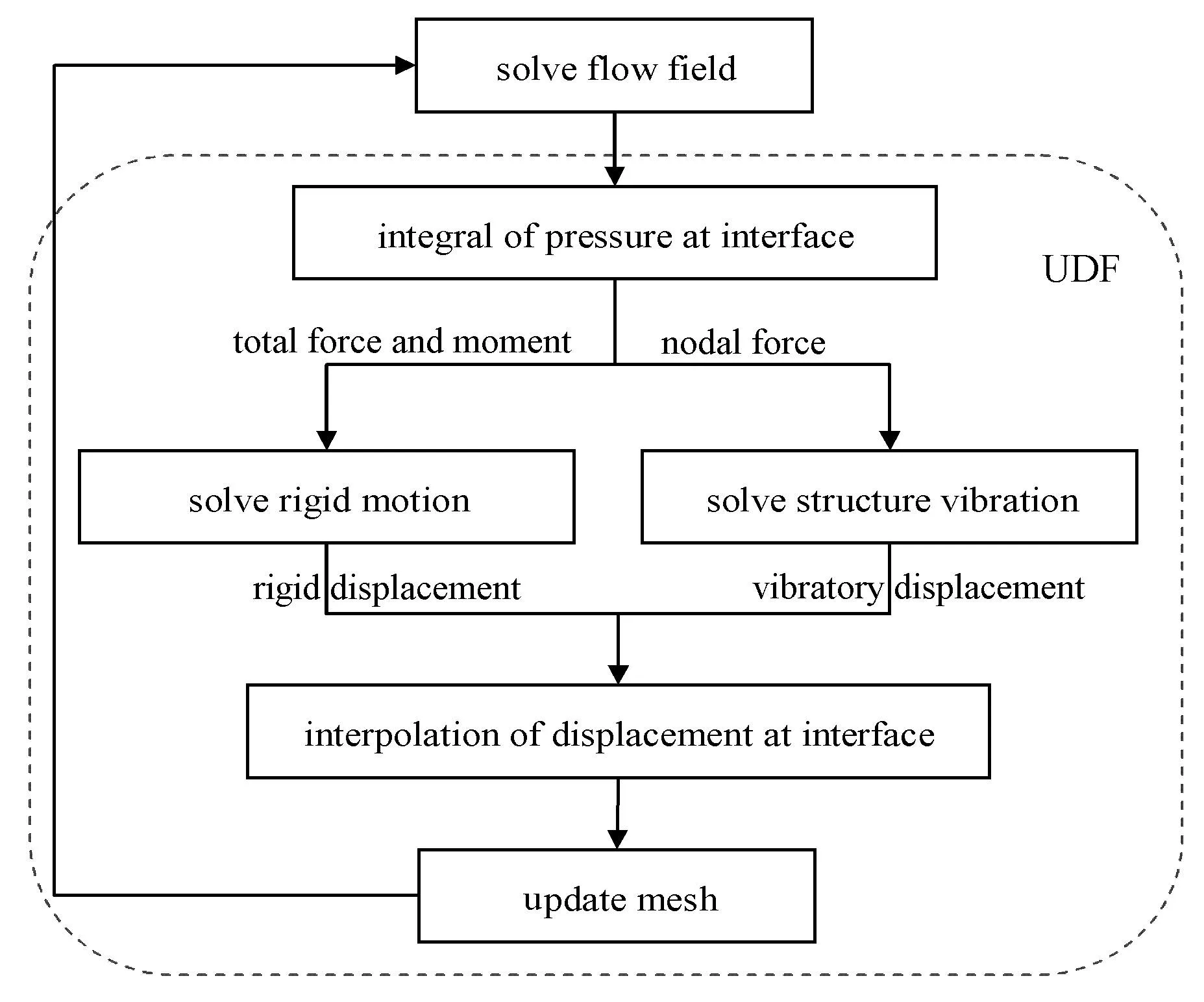
图1 流固耦合技术框图Fig.1 Block diagram of fluid-structur couplingmethod
在“A+”模式中,结构的求解以及流固耦合接口是通过用户自定义程序实现的,因此结构、流体之间的信息交换是直接在内存中进行的.一个时间步内的耦合包括以下过程:
(1)计算结构所受的节点力以及合力、合力矩.流场求解结束后,在流场计算域中遍历航行体上的面网格,获取面网格单元中心在大地坐标系的坐标(x,y,z).通过坐标变换求出对应的随体坐标系下的坐标(x′,y′,z′),从而判断该单元所处的相对位置.积分第i-1节点和第i节点之间的横向合力(Y′方向)作为第i节点的节点力.
(2)求解刚体位移和结构振动位移.调用结构求解函数,求解在节点力作用下的振动位移.计算航行体在合力、合力矩作用下的刚体位移.通过坐标变化求出大地坐标系下总的节点位移.
(3)插值流固边界位移.在流场计算域中遍历航行体上的网格节点,获取网格节点在大地坐标系的坐标(x,y,z).通过坐标变换求出对应的随体坐标系下的坐标(x′,y′,z′),从而判断该节点所处的相对位置,通过线性插值获得网格节点的位移.
(4)采用动网格方法,更新航行体表面所有网格节点的位置.更新结束后回到步骤(1),进入下一时间步的耦合计算.
在整个发射过程中计算域是从狭小空间到自由空间,对于这二者需要采用不同的动网格方法来处理.笔者主要用到了4种动网格算法,分别是弹簧网格法,局部网格重构,动态层状网格法和滑移网格法.对于出筒过程,为了提高精度、提高效率,一般采用滑移网格方法与动态层状网格方法相结合,网格需要是六面体或三棱柱型的单元.而对于水中航行和出水阶段,存在较大的刚体运动,因此采用弹簧网格方法与局部网格重构方法相结合,网格需要是四面体单元.这二者对于网格单元的要求是矛盾的,因此需要两套网格,出筒过程结束后需要将计算结果插值到新网格上,进行后续过程的计算(图2).
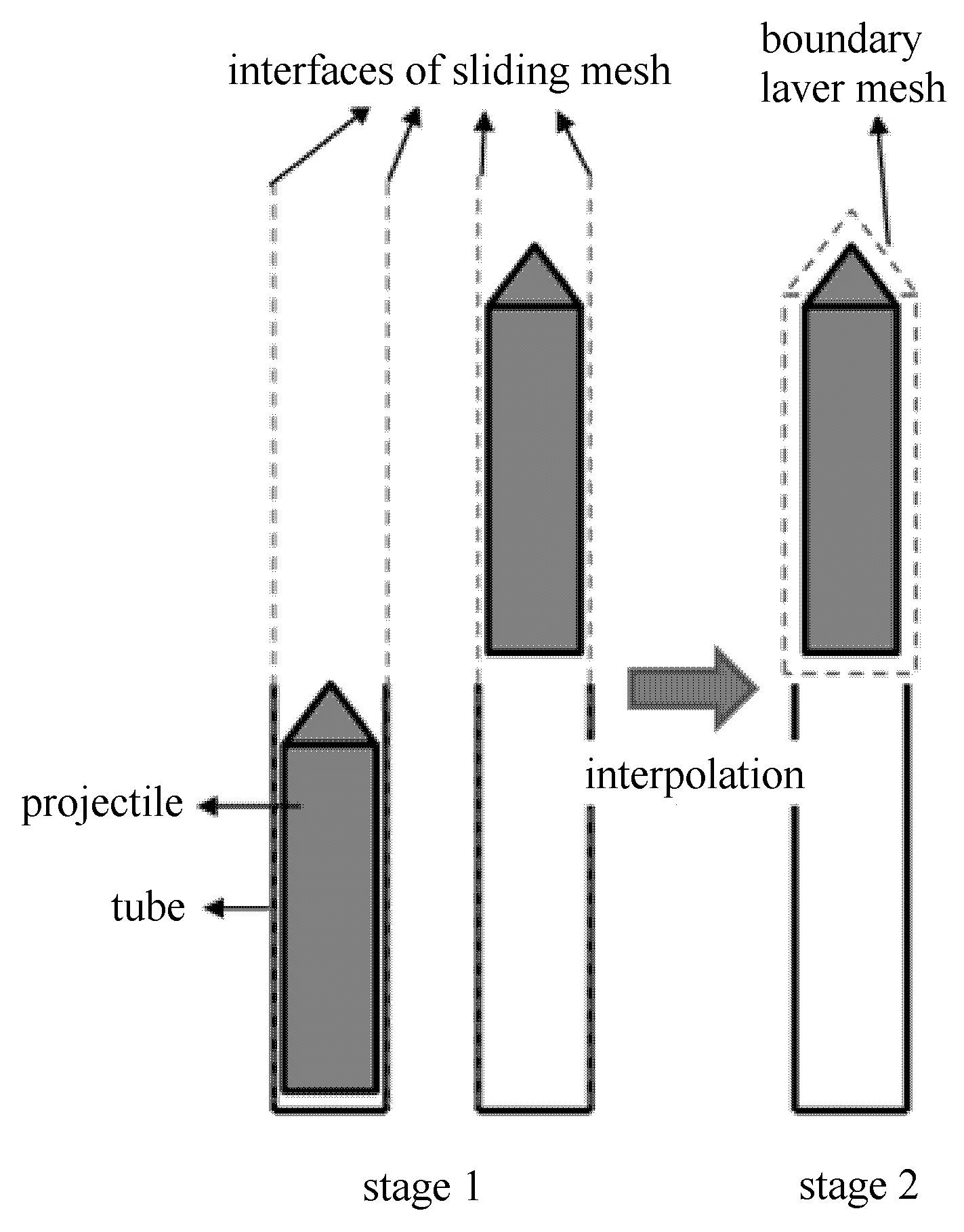
图2 计算衔接示意图Fig.2 Sketch of interpolation
1.2 空化流动模型
空化流动的控制方程包括混合物的雷诺平均纳维--斯托克斯方程(1)~(2),水蒸气质量分数f的输运方程(3).
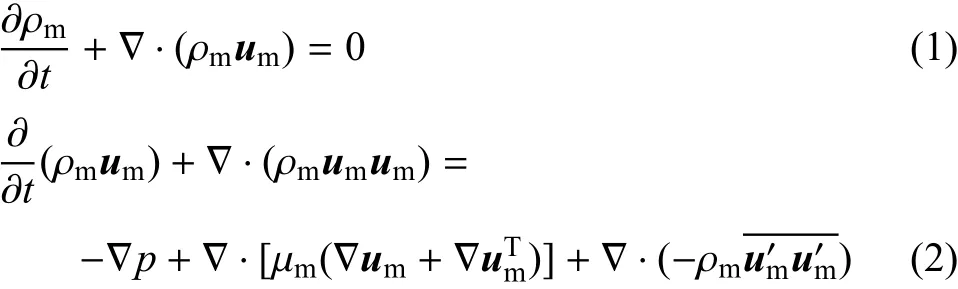

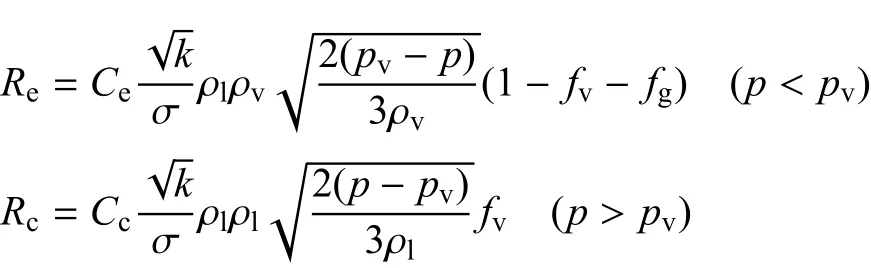
下标g和v分别代表不可凝结气体相和水蒸气相.fv为水蒸气的质量分数,fg为液体中所含不可凝结气体的质量分数,一般将这部分不可凝结气体取为空气,同时满足理想气体状态方程.由理想气体状态方程可知,在一定相同温度下压力较低时(例如液体的饱和蒸气压),即使这部分气体含量较少(例如10-5),也会由于膨胀作用而对空化流产生较大的影响.不可凝结气体的含量对物理实际和计算稳定性都有较大的影响,因此通常需要根据实际的水质给出.
本文采用修正的RNG k-ε湍流模式[29],该修正的湍流模式能够给出更为准确的回射流运动.湍流黏性给定如下形式

其中,f(ρ)=ρv+(1-αv)n(ρl-ρv).
1.3 结构计算模型
为了提高计算的精度和便于数据后处理,本文采用固定坐标系(惯性系)和随体坐标系(非惯性系)相结合的混合坐标体系,分别描述不同运动阶段的刚体位移及弹性振动.航行体的运动轨迹和姿态可以通过刚体的质心位置、3个欧拉角共6个变量确定.通过求解刚体运动方程即可获得航行体的运动轨迹和姿态.本文所关注的研究对象为细长体,因此可以将其简化为梁模型,其动力学方程为

其中,M为质量矩阵,C为阻尼矩阵,K为刚度矩阵,f为航行体所受节点力.方程(4)是基于小位移假设,而描述大范围的刚体位移为相对于航行体发射时的空间固定坐标系(图3中的XYZ坐标系),则需要建立随体坐标系和空间固定坐标系之间的转化关系.
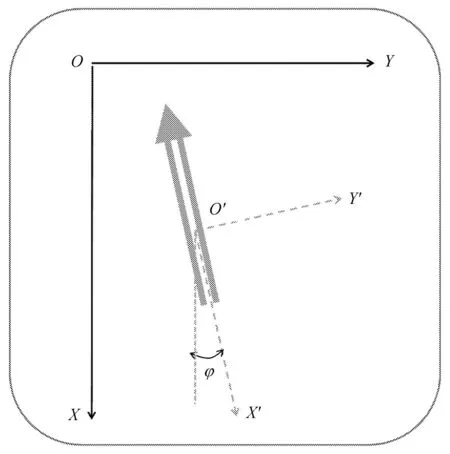
图3 坐标系示意图Fig.3 Coordinate systems
假设航行体只在XOY平面内运动,则随体坐标系和固定坐标系的位置关系为
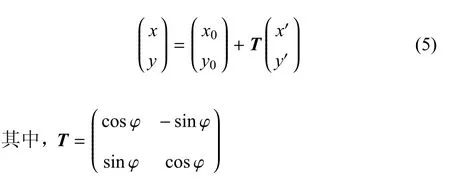
则节点位移关系为
节点速度关系为

节点加速度关系

其中(u0,v0),(˙u0,˙v0),(¨u0,¨v0)分别为节点的刚体位移、速度和加速度.考虑起始时刻固定坐标系与随体坐标系重合,即

只考虑横向振动(v′≡0),则有

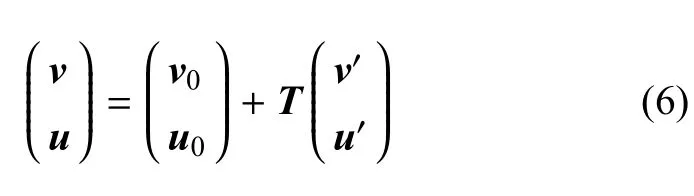
代入方程中可得

其中
xi为梁节点在质心坐标系下的坐标,总质量与绕质心转动惯量满足

由于刚体运动不引起结构阻尼,因此

整理可得随体坐标系下的结构振动方程
在小转动速度情形下,可以进一步忽略含高阶项˙φ2的项,即

可以看出,随体坐标系下的振动方程形式上与固定坐标下的方程形式相同,只是在外力项上需要扣除由于平动加速度和转动加速度带来的惯性力.计算中只需要对积分得到的节点力进行上述处理,即可求得航行体的振动位移,这样就能够将刚体运动和结构振动分开求解,便于计算以及后处理.本文采用时域积分法求解结构振动.
2 典型工况全过程模拟
2.1 对象及边界条件
对于水下发射来说,其所处的环境较为复杂,计算中需要做一定的简化处理.在没有侧向海流的情况下,航行体的运动一般可以视为平面运动(XOY平面内),即刚体运动只有3个自由度.
航行体直径为D,长度为L,头部形状为90°钝锥.初始时刻头部顶点与水面之间的距离为H=10D,出筒时刻的速度为V0,雷诺数为Re=7.2×107,空化数为Σ=0.26,不可凝结气体的质量分数fg=1.5×10-5.计算边界条件如图4所示.整个发射过程可以分为两个阶段:出筒阶段和筒外航行阶段.这两个阶段的计算由于动网格技术的不同分别采用了两套不同的网格(图5).在第1阶段中采用滑移网格方法和动态层状网格方法来模拟出筒过程,该类方法需要采用棱柱型网格.第2阶段采用网格重构方法,该方法需要采用四面体网格[30].由于两个阶段采用两套不同的网格,因此需要通过流场插值技术把第1阶段结束时的结果插值到新网格,作为第2阶段的初始值.在此算例中刚体运动只允许轴线运动一个自由度,以便于分析水动力与结构振动的耦合效应.
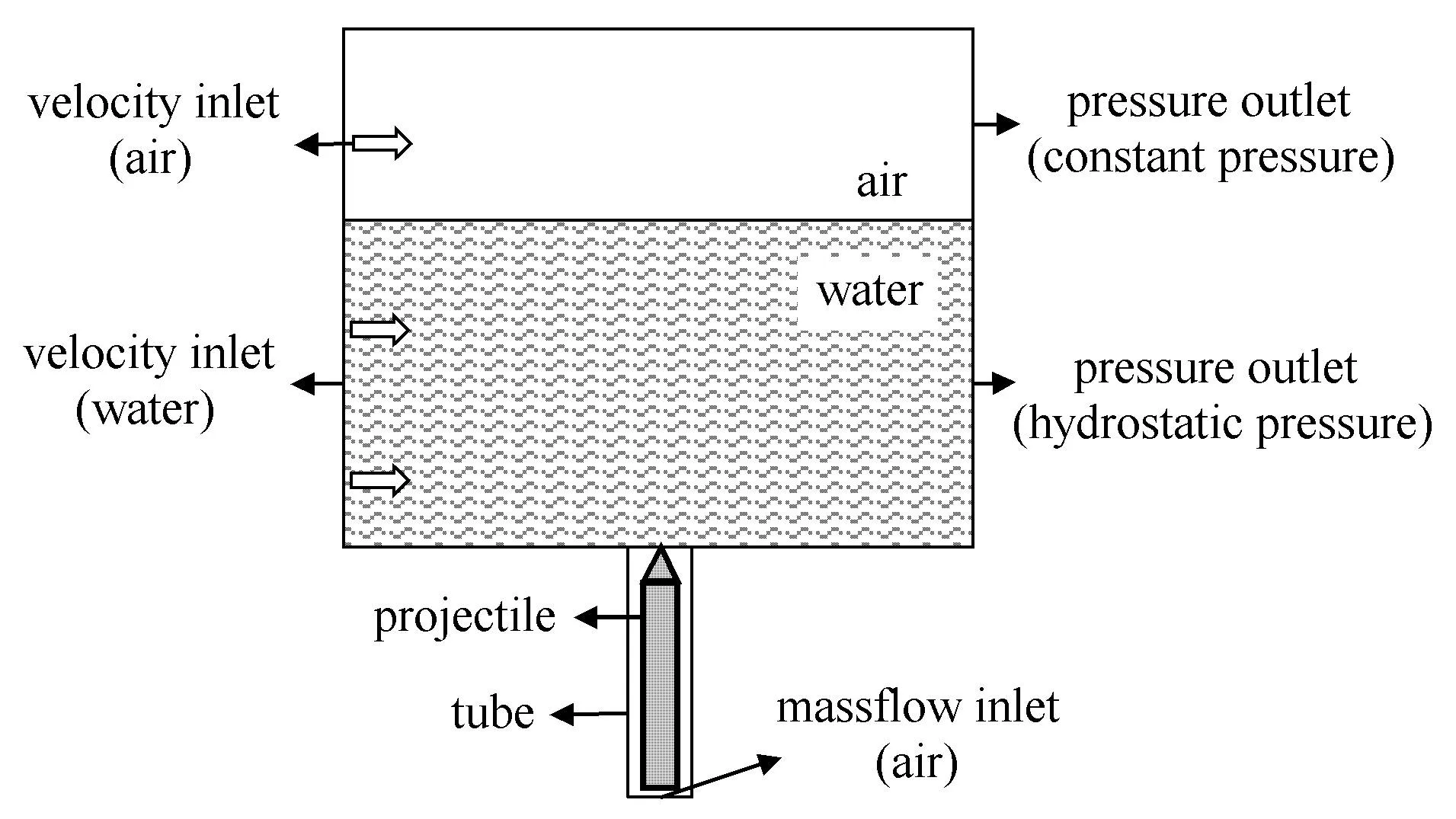
图4 计算边界条件Fig.4 Boundary conditions
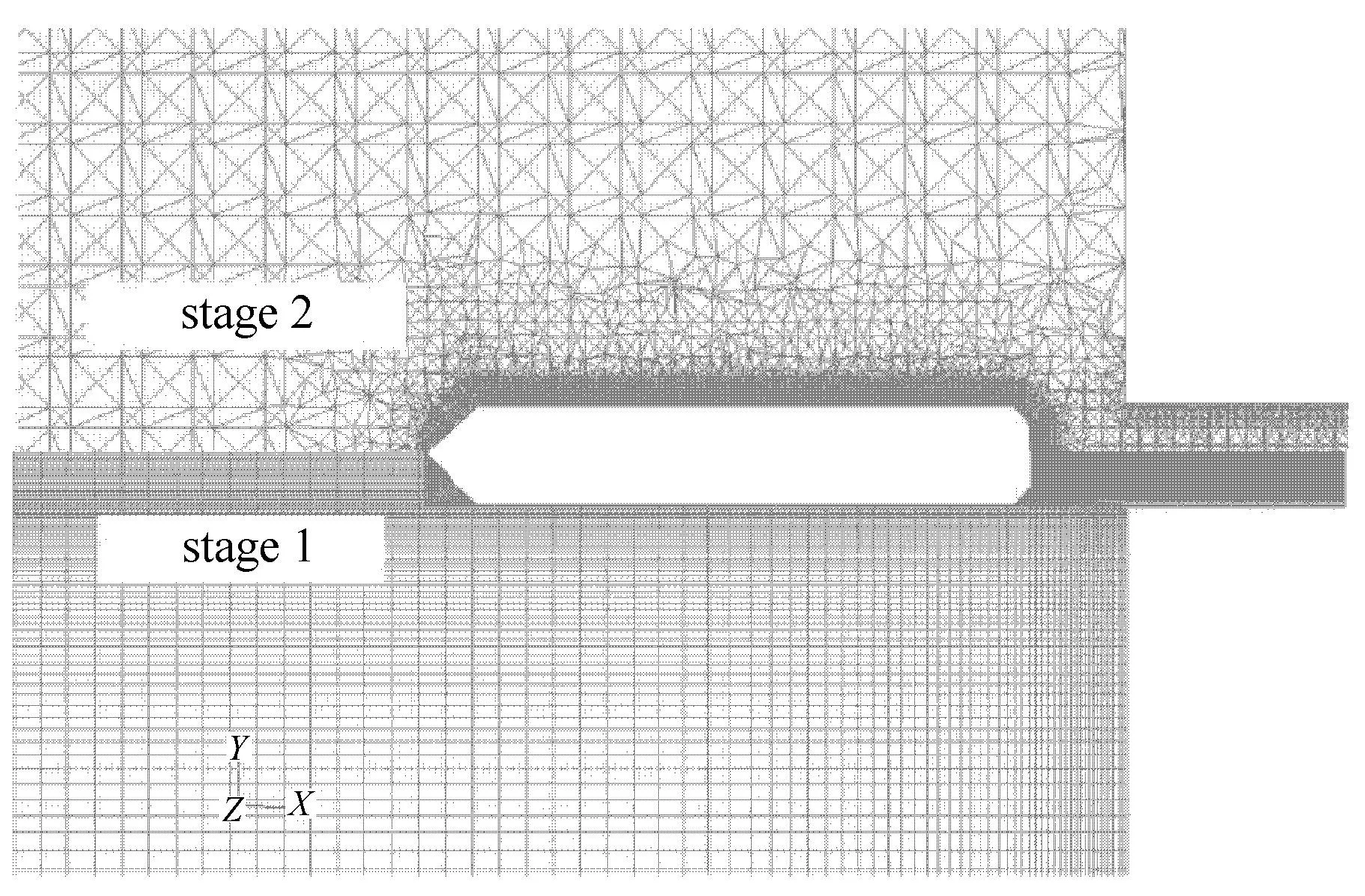
图5 轴截面网格:出筒过程(下)和出筒后(上)Fig.5 Meshes in themiddle section:Stage1(lower)and stage2(upper)
2.2 空泡演化特征分析
航行体周围的气团根据其性质可以分为附着空泡和燃气泡.其中重点关注的是航行体出水阶段附着肩空泡的溃灭过程.根据溃灭的特征可以将溃灭过程分为两个阶段(图6):在第1阶段,随着航行体穿过水面肩空泡从前端向空泡尾端依次溃灭,称为顺序溃灭;当溃灭点接近空泡尾端时进入第2阶段,剩余的空泡在周围压力作用下会同时溃灭,称为同步溃灭.
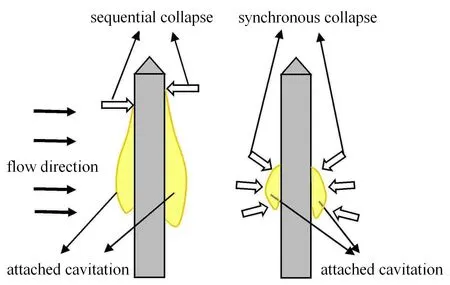
图6 附着空泡溃灭示意图Fig.6 Sketch of collapse process
2.3 水动力特征分析
定义无量纲时间t′=tU/D,其中U为发射速度,D为航行体直径.t′∈[0,15]为出筒阶段,t′∈[15,19]为水中航行阶段,t′∈[19,24]为出水溃灭阶段.图7给出了航行体迎背水面在t′=21时刻的压力分布.航行体表面压力存在两个峰值:溃灭峰值和回射峰值.溃灭峰值是由于空泡溃灭产生的高压脉冲[31],而回射峰值是空泡尾部由于流动再附导致的高压.可以看出,横向流动导致了迎背水面压力分布的差异:一方面迎水面的溃灭早于背水面,另一方面背水面的空泡长度较长,因此回射峰值更靠后.
图8和图9给出了溃灭过程中航行体所受无量纲节点力的时间曲线.无量纲节点力为CF=8Fn/(πD2ρ),其中Fn代表结构第n个节点所受的合力.可以看出两个溃灭阶段对应的溃灭压力的特征也不相同:在顺序溃灭阶段,溃灭压力从航行体头部向尾部依次扫过各个节点,溃灭推进的速度为Vc≈1.9V0,且幅值有波动;而在同步溃灭阶段,溃灭压力同时作用在相邻的几个节点上,且幅值高于顺序溃灭的压力幅值.从压力特征来看,顺序溃灭的压力幅值和空间脉宽较小,而同步溃灭压力是一个大范围、高幅值的压力脉冲,同步溃灭更可能造成结构的破坏.

图7 航行体表面压力分布(t′=21)Fig.7 Pressure distributionsat t′=21
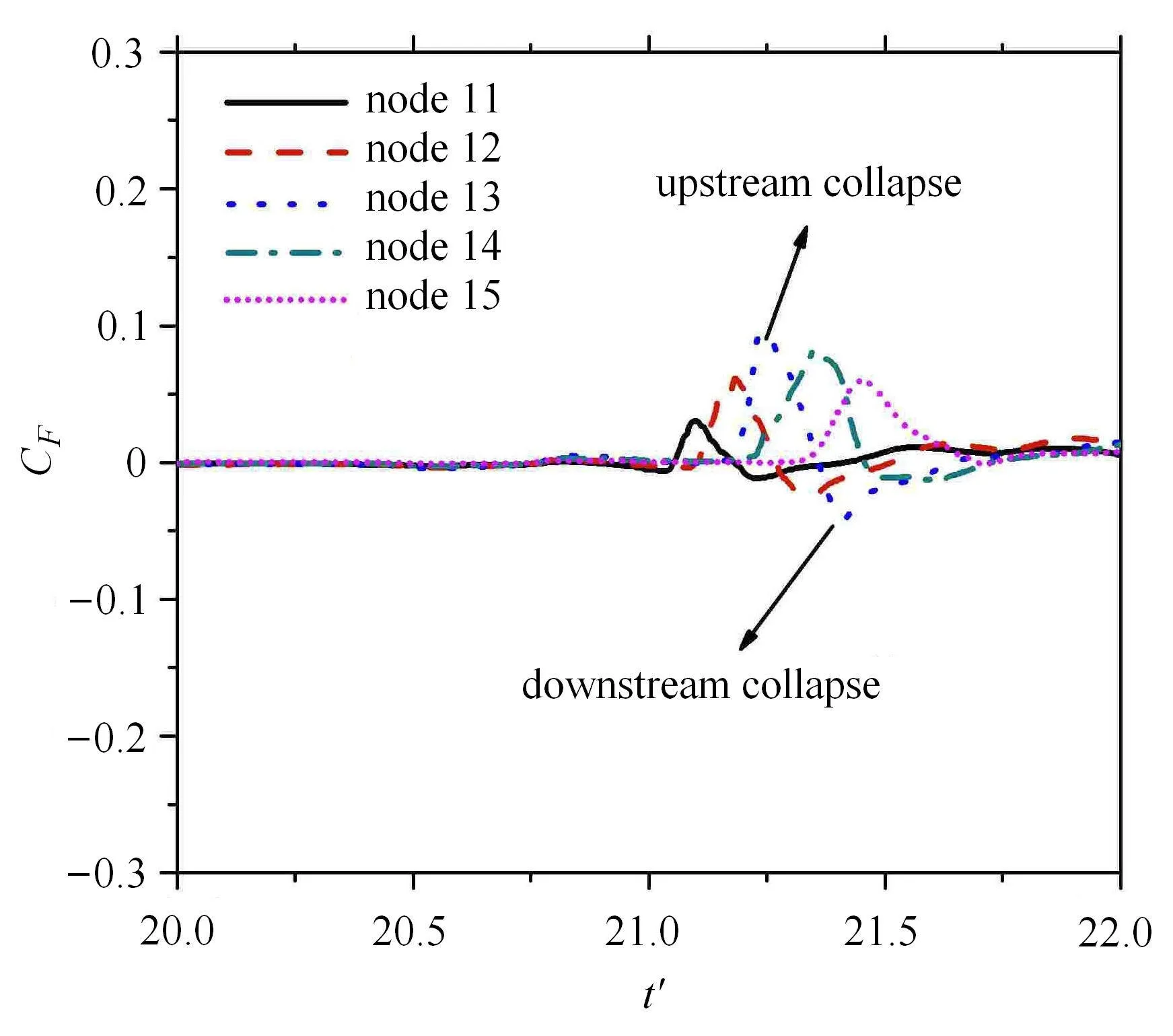
图8 节点力--时间曲线(顺序溃灭)Fig.8 Typicalnodal forces-time curves(sequential collapse)
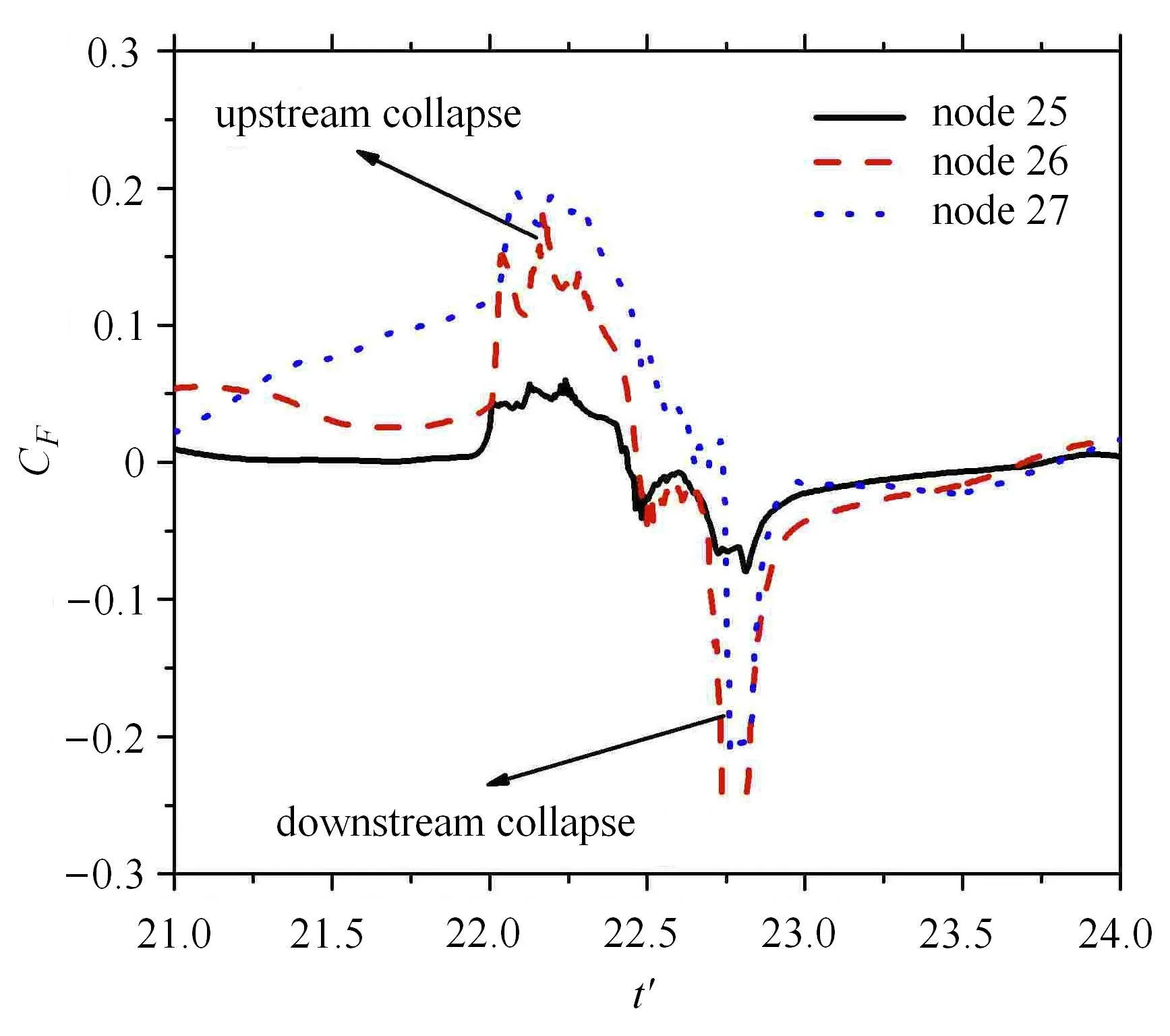
图9 节点力--时间曲线(同步溃灭)Fig.9 Typicalnodal forces-time curves(synchronous collapse)
2.4 结构响应特征分析
图10给出了水下发射过程中航行体不同位置截面的无量纲弯矩,其定义为CM=8Mn/(πD2ρV20LK),其中Mn为第n个节点所在截面的内力弯矩,K为刚度比例系数,在本算例中K=1.从图10中可以看出弯矩最大值出现在航行体的出水阶段,这与水动力的特征相符.
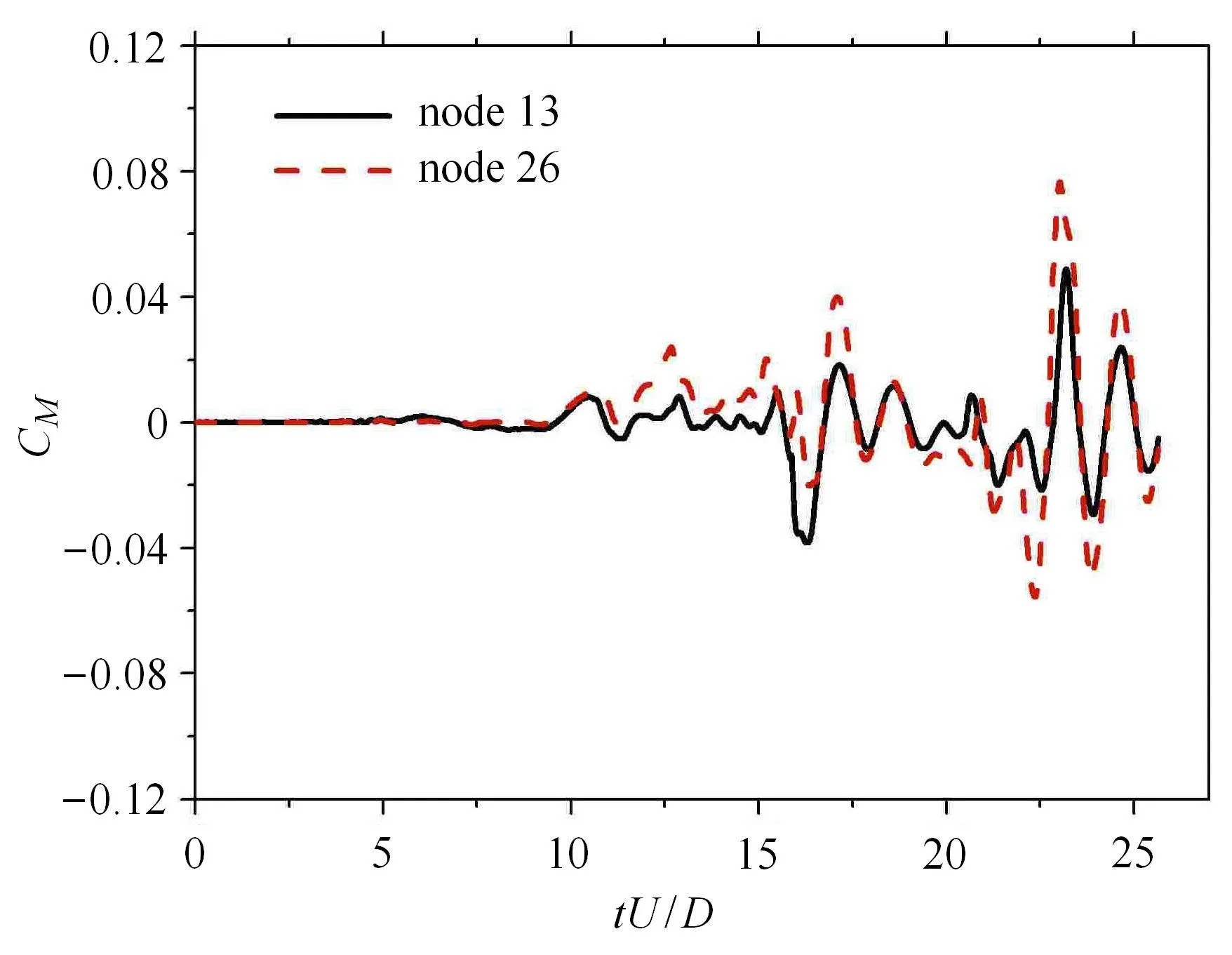
图10 水下发射过程中不同位置截面弯矩--时间曲线Fig.10 Bendingmomentsof di ff erentsections
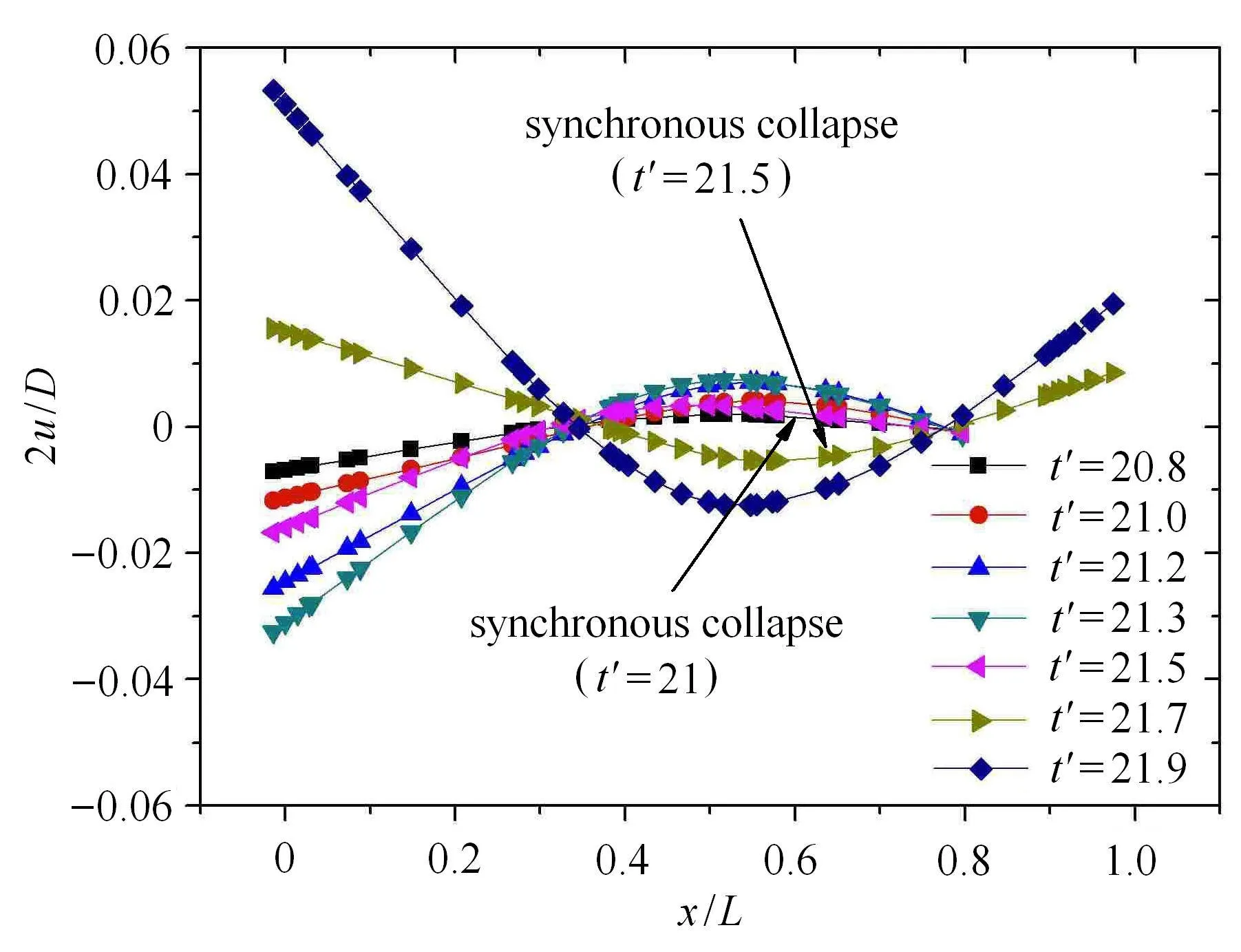
图11 同步溃灭阶段节点振动位移Fig.11 Vibratory displacementof projectileatsynchronous collapse stage
计算结果表明,在顺序溃灭阶段,结构弯矩较小,而同步溃灭阶段结构弯矩较大.因此附着空泡同步溃灭产生的溃灭压力是整个过程中的重要因素.
图11给出了同步溃灭阶段不同时刻航行体的节点振动位移,其中X轴代表节点位置,航行体的顶点为零点.2u/D代表随体坐标系下的无量纲振动位移.可以看出,在给定的计算条件下航行体以一阶弯曲振动为主,同步溃灭作用点位于一阶振动的两个节点之间.
从以上分析可以看出,在航行体出水过程中,肩空泡随之溃灭,并产生高压脉冲.由于横向流动导致迎背水面溃灭压力发生的时刻和位置有所差异,从而导致航行体产生较大的振动.肩空泡的溃灭分为顺序溃灭和同步溃灭两个阶段,其中同步溃灭产生的压力脉冲的幅值和范围更大,是导致结构内力弯矩达到最大值的直接原因.因此,在后续的分析中主要关注同步溃灭与结构振动的耦合效应.
3 耦合效应分析
3.1 发射条件的影响
对于水下发射来说,可控的发射条件包括:发射深度H、发射速度V0和横向流速U0.横向流动是导致迎背水面压力差异的主要原因,因此给定3个典型工况的计算条件(表1).
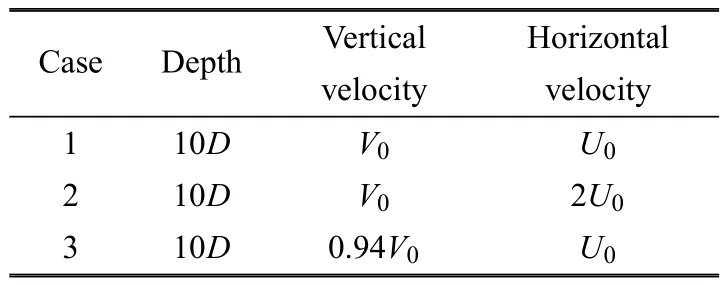
表1 计算条件Table 1 Simulation conditions
图12给出了不同发射条件下x/L=0.56截面的弯矩对比.可以看到,虽然3个工况对应的节点力在幅值上差别较大,但是截面弯矩的特征都很接近,有如下几个特点:
(1)顺序溃灭导致的截面弯矩均小于同步溃灭引起的弯矩.
(2)顺序溃灭阶段弯矩曲线有差异,但是在迎水面同步溃灭总是造成负向的弯矩最大值,背水面同步溃灭造成正向的弯矩最大值,因此在同步溃灭阶段弯矩曲线趋势一致.这是由于同步溃灭的峰值约为顺序溃灭峰值的2倍.
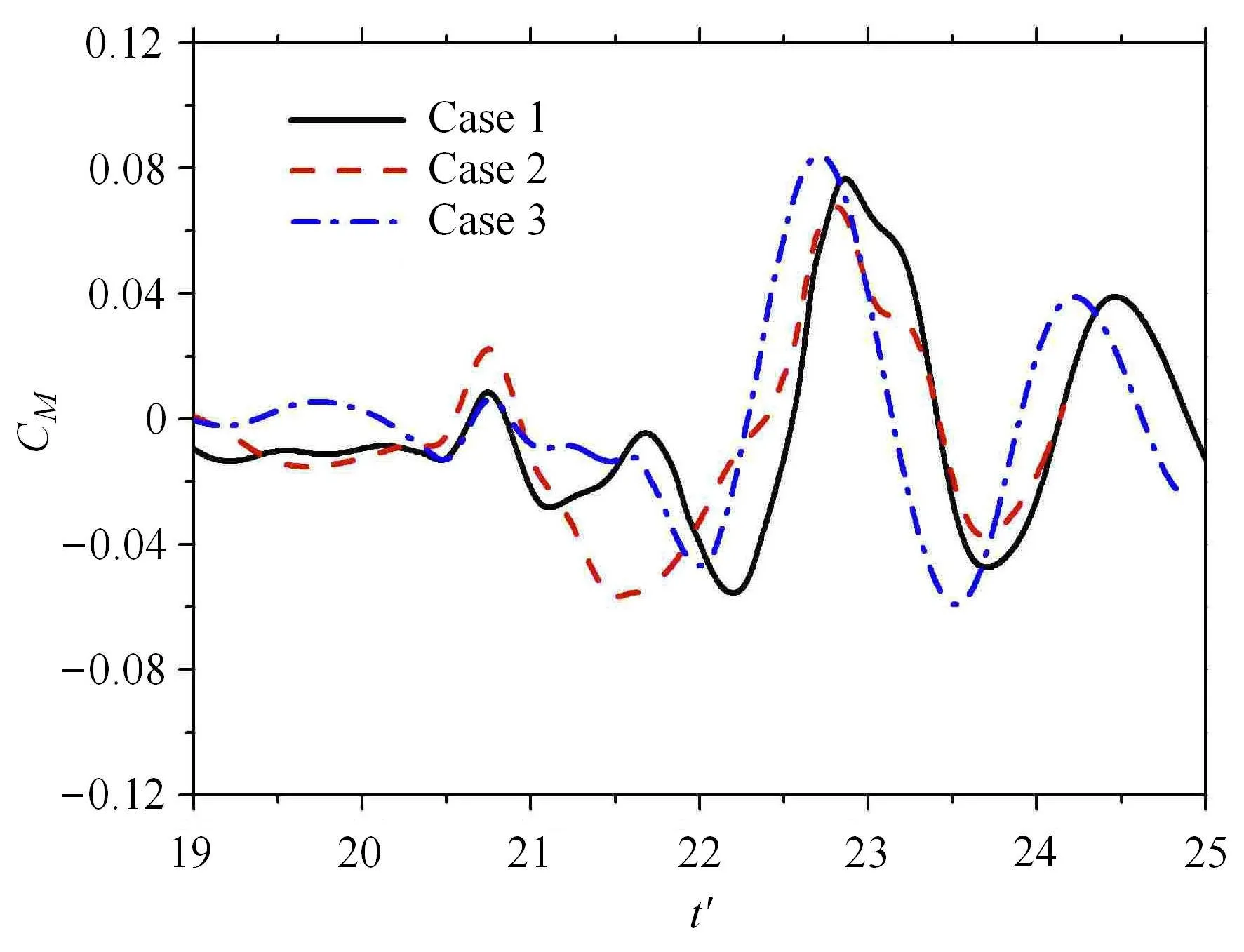
图12 不同发射条件下在x/L=0.56处的截面弯矩Fig.12 Comparation of bendingmomentsat x/L=0.56
(3)同步溃灭结束后结构进入自由衰减振动.
表2给出了3个工况对应的节点力和截面弯矩可以看到,Case 1和Case 3的溃灭压力幅值相差不大,但弯矩却有较大的区别.另外,Case 3的溃灭压力幅值低于Case 1,但是弯矩却高于Case 1.这说明虽然结构的振动是由于附着空泡溃灭导致的,但是并非溃灭压力的幅值越大、结构弯矩就越大,还存在其他控制因素.计算结果表明,Case3中同步溃灭作用于航行体的腹部,位于一阶振动两个节点之间.而Case 1中同步溃灭的作用位置更接近于第2个节点.当前参数条件下结构主要是一阶弯曲振动,因此在溃灭压力幅值相差不大的条件下,作用位置对结构弯矩具有重要的影响.Case2的迎水面溃灭作用更接近腹部,但是结构弯矩却低于Case1,这说明除了溃灭压力幅值和作用位置之外,迎背水面的溃灭时间差可能也是重要的影响因素.
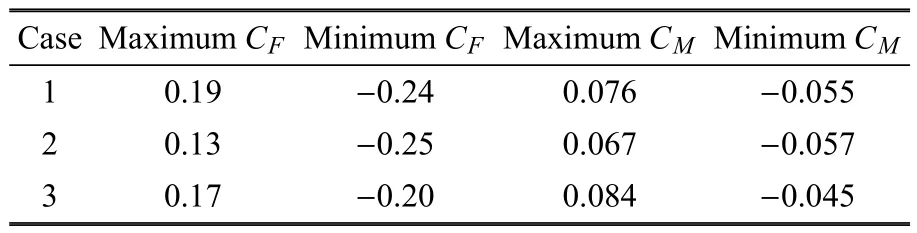
表2 同步溃灭阶段节点力及截面弯矩(x/L=0.56)Table 2 Nodal forcesand bendingmomentsat x/L=0.56
通过不同发射条件全过程的模拟,发现结构弯矩与溃灭压力的幅值并不是正相关,同步溃灭作用位置以及迎背水面同步溃灭时间差亦是影响结构弯矩的重要因素.
3.2 刚度的影响
为了进一步分析迎背水面溃灭时间差对弯矩的影响,保持其他计算条件不变,通过给定不同结构刚度(K=1,K=1.5,K=2,K=6),来调整二者之间的关系.计算结果表明,不同刚度对应的节点力特征基本一致,但是在局部溃灭压力幅值上有差异,这是由于结构振动对水动力的影响.在水动力相近的条件下,由于结构刚度的不同,其对应的结构弯矩也不同(表3).从图13可以看出,在溃灭过程中,结构一阶弯曲振动频率fs与刚度系数K的关系近似为:对于本文所给定的计算条件,当K≥1时,基本都以一阶弯曲振动为主.
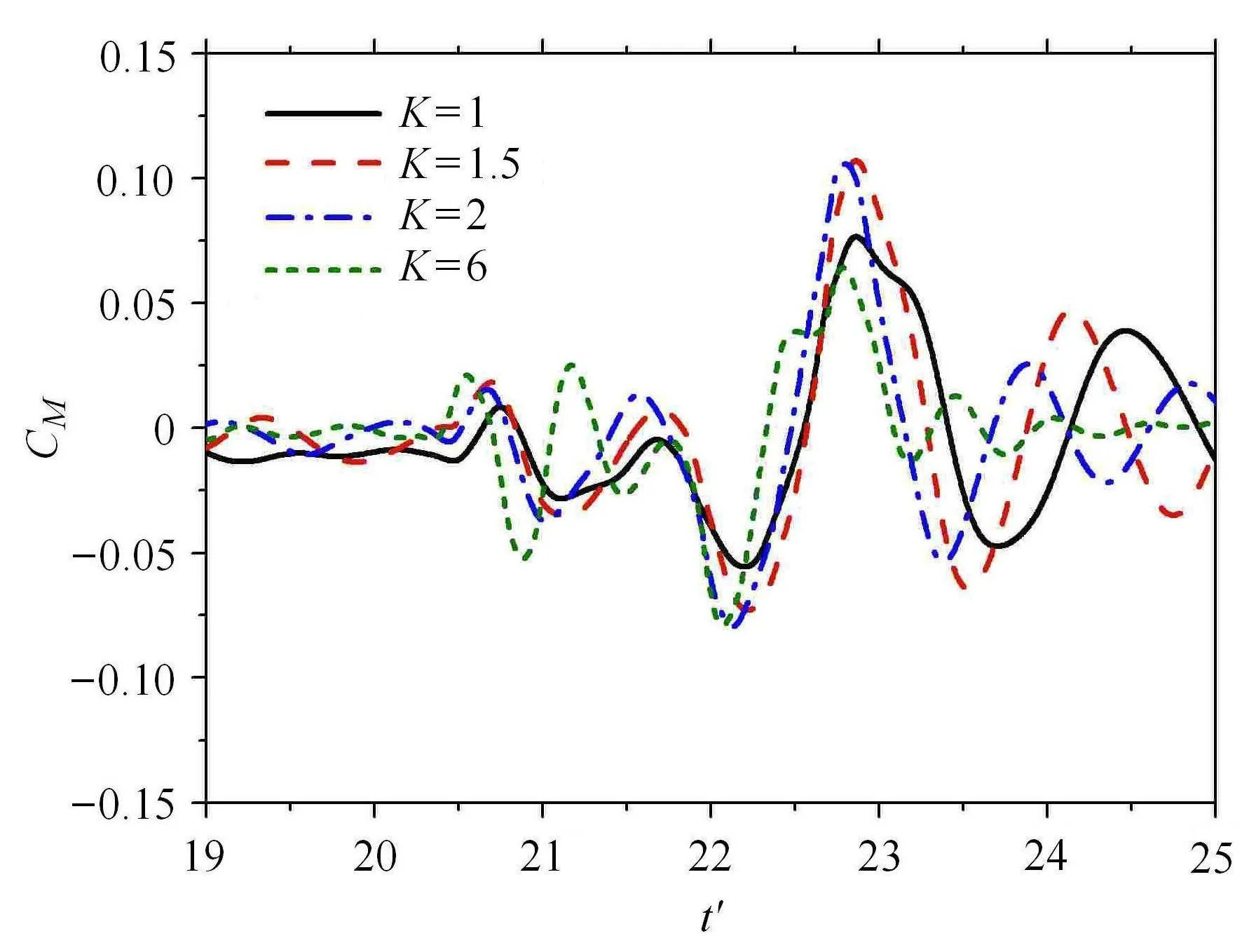
图13 不同结构刚度在x/L=0.56处的截面弯矩Fig.13 Comparation of bendingmomentat x/L=0.56w ith di ff erent sti ff nesses

表3 同步溃灭阶段节点力及截面弯矩(x/L=0.56)Table3 Nodal forcesand bendingmomentsat x/L=0.56
由于发射条件相同,因此不同刚度航行体计算得到的溃灭压力及其作用位置基本相同,区别在溃灭压力与结构振动的相位关系不同(表4).定义无量纲时间f∆T,其中f为航行体的一阶弯曲振动频率,∆T为迎背水面同步溃灭时间差.可以看出当f∆T=0.5时,航行体的结构弯矩最大,当f∆T=1.0时结构弯矩最小.这是因为当f∆T=0.5时,背水面溃灭与结构振动的相位相同,迎背水面溃灭对结构作用相互叠加,从而导致更大的结构弯矩.相反的,当f∆T=1.0时背水面与结构振动的相位相反,迎背水面溃灭对结构作用相互抵消,因此结构弯矩较小.
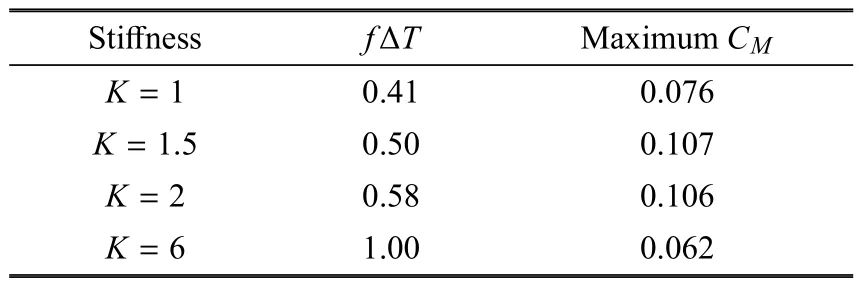
表4 无量纲时间f∆T与截面弯矩(x/L=0.56)的关系Table4 The relationship between f∆T and bending momentsat x/L=0.56
4 结论
本文围绕水下发射,针对关注的水动力载荷与结构响应特征等问题,建立了水下发射流固耦合计算模型.本文采用C语言编写数据传递,结构计算,结构程序调用,坐标变换,插值等子函数,利用FLUENT软件提供的用户自定义函数接口链接函数,实现空化流动模型和结构模型的耦合交互计算.同时利用动网格技术和插值技术实现了航行体从狭小空间的约束运动到自由运动的水下发射全过程模拟.
利用建立的流固耦合计算方法,对水下发射过程进行了模拟.对水下发射过程进行了数值模拟,分析了水动力和结构响应特征以及这两者之间的耦合效应,主要结论如下:
(1)在发射过程中,航行体上的附着空泡包括肩空泡和尾空泡.在航行体出水过程中,肩空泡会随之溃灭,并产生高压脉冲.横向流动会导致迎背水面溃灭压力发生的时刻和位置有所差异,从而引起航行体较大的振动.肩空泡的溃灭分为顺序溃灭和同步溃灭两个阶段,其中同步溃灭产生的压力脉冲的幅值和作用范围更大,是导致结构内力弯矩达到最大值的直接原因.
(2)不同发射条件的弯矩曲线在顺序溃灭阶段有差异,但是在迎水面同步溃灭总是造成负向的弯矩最大值,背水面同步溃灭造成正向的弯矩最大值,因此在同步溃灭阶段弯矩曲线趋势一致.这是因为同步溃灭的峰值约为顺序溃灭峰值的两倍.同步溃灭结束后结构进入自由衰减振动阶段.
(3)影响结构弯矩的主要因素包括:溃灭压力幅值,溃灭压力作用位置,以及溃灭压力与结构振动的相位关系.其他条件相同的条件下,溃灭压力作用位置越靠近腹部,结构弯矩越大.其他条件相同的条件下,迎背水面溃灭时间差与结构振动周期之比越接近于0.5时,结构弯矩越大;该比值越接近于1,则结构弯矩越小.
1张博,王国玉,黄彪等.云状空化非定常脱落机理的数值与实验研究,力学学报,2009,41(5):651-659(Zhang Bo,Wang Guoyu,Huang Biao,etal.Numericaland experimentalstudieson unsteady sheddingmechanismsof cloud cavitation.Chinese JournalofTheoreticaland Applied Mechanics,2009,41(5):651-659(in Chinese))
2 Franc JP.Attached cavitation and the boundary-layer-experimental investigation and numerical treatment.JournalofFluid Mechanics,1985,154(154):63-90
3王一伟,黄晨光,方新等.水下回转航行体的云状空化回射流运动特征研究,水动力学研究与进展,2013,28(1):23-29(Wang Yiwei,Huang Chenguang,Fang Xin,et al.Characteristics of the re-entry jet in the cloud cavitating fl w overa submerged axisymmetric projectile.Chinese Journal ofHydrodynamics,2013,28(1):23-29(in Chinese))
4 Venkateswaran S,Lindau JW,Kunz RF,etal.Computation ofmultiphasem ixture fl wsw ith compressibility e ff ects.JournalofComputationalPhysics,2002,180(1):54-77
5 KawanamiY,Kato H,YamaguchiH,etal.Mechanism and control of cloud cavitation.Journal ofFluids Engineering,1997,119(4):788-794
6陈玮琪,颜开,王宝寿等.物体斜出水过程的轴向水动力参数辨识.船舶力学,2007,11(4):521-527(Chen Weiqi,Yan Kai,Wang Baoshou,et al.Parameter identificatio of axial hydrodynamic forcesacting on axis-symmetricbody exitingwaterobliquely.JournalofShip Mechanics,2007,11(4):521-527(in Chinese))
7尹云玉.固体火箭横向响应载荷识别方法.宇航学报,2009,28(6):2135-2139(Yin Yunyu,The identificatio method of transverse responding load forsolid rocket.JournalofAsrtonautics,2009,28(6):2135-2139(in Chinese))
8尹云玉.固体火箭自由运行状态截面弯矩识别方法.宇航学报,2010,31(7):1706-1710(Yin Yunyu,The identificatio method for transverse respondsemomentofsolid rocketduring free flight JournalofAsrtonautics,2010,31(7):1706-1710(in Chinese))
9 Young YL.Time-dependent hydroelastic analysis of cavitating propulsors.JournalofFluidsand Structures,2007,23(2):269-295
10 Young YL.Fluid-structure interaction analysis of fl xible compositemarinepropellers.JournalofFluidsand Structures,2008,24(6):799-818
11 Young YL,Liu Z,XieW.Fluid-structure and shock-bubble interaction e ff ectsduring underwaterexplosionsnear compositestructures.JournalofApplied Mechanics,2009,76(5):911-914
12 Ducoin A,Young YL,Hydroelastic response and stability of a hydrofoil in viscous fl w.Journal of Fluids and Structures,2013,38(3):40-57
13任怀勋,三维水翼空化的流体动力和结构载荷特性数值模拟研究.[硕士论文].哈尔滨:哈尔滨工业大学,2014(Ren Huaixun.Numerical research on the hydrodynamic and structural characteristics of 3D hydrofoil under cavitation.[Master Thesis].Harbin:Harbin Instituteof Technology,2014(in Chinese))
14 Campbell RL,Paterson EG,Fluid-structure interaction analysis of fl xible turbo-machinery.JournalofFluidsand Structures,2011,27(8):1376-1391
15陈伟民,李敏,郑仲钦等.细长轴对称体的水弹性振动特性分析.中国科学:物理学力学天文学,2010,40(9):1165-1173(Chen Weim in,LiM in,Zheng Zhongqin,etal.Analysisof hydroelascity characteristic of axi-symmetry slender body.Scientia Sinica Phys,Mech&Astron,2010,40(9):1165-1173(in Chinese))
16吕海波,权晓波,尹云玉等.考虑水弹性影响的水下航行体结构动响应研究,力学学报,2010,42(3):350-356(L¨u Haibo,Quan Xiaobo,Yin Yunyu,et al.Dynamic response research of underwater vehiclew ith consideration ofhydroelascity.Chinese JournalofTheoreticaland Applied Mechanics,2010,42(3):350-356(in Chinese))
17乐光明.潜射导弹出水姿态与载荷特性分析.[硕士论文].哈尔滨:哈尔滨工业大学,2011(LeGuangming.Theanalysisofwaterexitattitudeand the load characteristic of submarine-basedmissiles.[Master Thesis].Harbin:Harbin Institute of Technology,2011(in Chinese))
18程载斌,刘玉标,刘兆等.导弹水下潜射过程的流体--固体耦合仿真.兵工学报,2008,29(2):178-183(Cheng Zaibin,Liu Yubiao,Liu Zhao,etal.FSIsimulation of the vertical launching processof underwaterm issile.Acta Armamentarii,2008,29(2):178-183(in Chinese))
19李国良,袁湘江,敖林.潜射导弹出水载荷数值算法研究.力学与实践,2012,35(4):25-30(LiGuoliang,Yuan Xiangjiang,Ao Lin.Simulation of under-water launchedm issile’swater-exit load.Mechanics in Engineering,2012,35(4):25-30(in Chinese))
20张健,范国芳,张兴国.航行体垂直出筒载荷特性及影响因素分析.战术导弹技术,2014,(5):6-10(Zhang Jian,Fan Guofang,Zhang Xingguo,Characteristic analysisand e ff ect factorsaboutdynam ic load of underwater vehicles during vertical launching from a tube.TacticalMissile Technology,2014,(5):6-10(in Chinese))
21王亚东,袁绪龙.气泡弹性对同心筒水下发射影响研究.船舶工程,2013(2):313-318(Wang Yadong,Yuan Xulong,Dynam ic analysis and com fort evaluation of the three-dimension body-vehicleroad coupled system.Chinese JournalofComputationalMechanics,2013(2):313-318(in Chinese))
22杨晓光,潜射导弹水下发射及出水过程三维数值研究.[硕士论文].哈尔滨:哈尔滨工业大学,2009(Yang Xiaoguang.3D numerical simulation on theprocess of themissile underwater launching and exiting from water.[Master Thesis].Harbin:Harbin Instituteof Technology,2009(in Chinese))
23赵成佳.考虑艇速等因素的航行体出筒过程的流场仿真研究.[硕士论文].哈尔滨:哈尔滨工业大学,2011(Zhao Chengjia.The simulation on exceeding tube processof an underwater vehicle consider factors such as boat speed.[Master Thesis].Harbin:Harbin Instituteof Technology,2011(in Chinese))
24申丽辉.航行体水下及出水过程的流体特性研究.[硕士论文].哈尔滨:哈尔滨工业大学,2013(Shen Lihui.Research on flui characteristics in the processofunderwatermotion and water-exitof vehicle.[Master Thesis].Harbin:Harbin Institute of Technology,2013(in Chinese))
25秦勇.均压气体对考虑波浪的水动力特性影响机制研究.[硕士论文].哈尔滨:哈尔滨工业大学,2014(Qin Yong.E ff ectof gasexhausting on hydrodynam ic characteristic of underwater vehicle considering wave.[Master Thesis].Harbin:Harbin Institute of Technology,2014(in Chinese))
26马庆鹏,潜射航行体出筒过程载荷特性的数值模拟研究.[硕士论文].哈尔滨:哈尔滨工业大学,2011(Ma Qingpeng.Numerical simulation on the tube-exit load characteristics of submarinelaunched vehicle.[MasterThesis].Harbin:Harbin Instituteof Technology,2010(in Chinese))
27王一伟.高速航行体水动力载荷特征与机理研究.[博士论文].北京:中国科学院大学,2013(Wang Yiwei.Principal characteristicsand physicalmechanismsof hydrodynamic load for high-speed underwater vehicles.[PhD Thesis].Beijing:University of Chinese Academy of Sciences,2013(in Chinese))
28 SinghalAK,AthavaleMM,LiH,etal.MathematicalBasisand Validation of the FullCavitation Model.JournalofFluidsEngineering,2002,124(3):617-624
29 Stutz B,Reboud JL.Two-phase fl w structure of sheet cavitation.PhysicsofFluids,1997,9(12):3678-3686
30杜特专,黄晨光,王一伟等.动网格技术在非稳态空化流计算中的应用.水动力学研究与进展,2010,25(2):190-198(Du Tezhuan,Huang Chenguang,Wang Yiwei,et al.Investigation of dynam ic mesh technique and unsteady cavitation fl ws.Chinese Journal of Hydrodynamics,2010,25(2):190-198(in Chinese))
31王一伟,黄晨光,杜特专等.航行体垂直出水载荷与空泡溃灭机理分析.力学学报,2012,44(1):39-48(Wang Yiwei,Huang Chenguang,Du Tezhuan,etal,Mechanism analysisaboutcavitation collapse load of underwater vehihles in a verti-cal launching process.Chinese JournalofTheoreticaland AppliedMechanics,2012,44(1):39-48(in Chinese))
STUDY ON COUPLING EFFECTSOFUNDERWATER LAUNCHED VEHICLE1)
Du Tezhuan∗,2)Wang Yiwei∗,†Huang Chenguang∗,†Liao Lijuan∗∗
(Key Laboratory forMechanics in Fluid Solid Coupling Systems,Institute ofMechanics,CAS,Beijing 100190,China)†(SchoolofEngineering Science,University ofChinese Academy ofSciences,Beijing 100049,China)
As to underwater launch,it is important to study the characteristic of hydrodynam ic forces and structural response.It includes complex fl w w ith phase change,structural behavior under time-vary constraints and coupling e ff ectsbetween flui and structure.Loosely coupledmethod isutilized in the presentwork,inwhich the structuralsolver is linked to the fl w solver.Governing equationsof flui dynam icsand structuraldynamicsare solved respectively.The coupled algorithm is achieved by exchanging data through the interface of flui domain and solid domain every time step.The fl w model is based on RANS equations.In thismodel,m ixturemodel is used to simulatemultiphase fl w,a cavitationmodel is introduced to describe the phase change,amodifie turbulencemodel is utilized to simulate the turbulente ff ectofmixture,and the dynam icmesh technique isadopted to dealw ith themoving boundary.Rigidmotion and structural vibration are calculated respectively.The structuralmodel is established based on the equivalent beam model,and computed by the time domain integralmethod in Body Axes System.The fluid-structur couplingmethod issetup aimed atunderwater launch processand hasbeen validated by the experiment.Thismethod could notonly capture the evolution of the natural cavitation,butalso obtain hydrodynam ics forces,structure vibration and bendingmomentof the projectile.Weutilize theproposedmodel to study the influenc of structuralsti ff nessand launch velocity on coupling e ff ect of cavity collapse and structural vibration.The results show that structural load ismainly a ff ected by collapse pressure including pressure amplitude,acting location and phase relationship between collapse pressure and structural vibration.
fluid-structur interaction,cavitation,collapse,vibration,numericalsimulation
O352
A
10.6052/0459-1879-16-401
2016-12-28收稿,2017-02-27录用,2017-02-27网络版发表.
1)国家自然科学基金资助项目(11402276).
2)杜特专,助理研究员,主要研究方向:高速水动力学.E-mail:dutezhuan@imech.ac.cn
杜特专,王一伟,黄晨光,廖丽涓.航行体水下发射流固耦合效应分析.力学学报,2017,49(4):782-792
Du Tezhuan,Wang Yiwei,Huang Chenguang,Liao Lijuan.Study on coupling e ff ectsof underwater launched vehicle.Chinese Journal ofTheoreticaland Applied Mechanics,2017,49(4):782-792
猜你喜欢
火箭推进(2022年2期)2022-05-14
上海交通大学学报(2021年8期)2021-09-02
疯狂英语·新读写(2021年6期)2021-08-05
数字海洋与水下攻防(2021年2期)2021-05-08
高校化学工程学报(2020年4期)2020-09-15
机械制造(2020年1期)2020-03-04
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
厦门理工学院学报(2016年1期)2016-12-01
系统工程与电子技术(2016年2期)2016-04-16
