
新型磨机换衬板机械手的工作空间分析
2017-08-16 14:51刘祚时杜人照
制造业自动化 2017年6期
殷 娜,刘祚时,童 乐,杜人照
(江西理工大学 机电工程学院,赣州 341000)
新型磨机换衬板机械手的工作空间分析
殷 娜,刘祚时,童 乐,杜人照
(江西理工大学 机电工程学院,赣州 341000)
机械手的工作空间是评价机械手工作能力的一项重要指标。基于SolidWorks研究设计一种新型磨机换衬板机械手,并对机械手的正运动学和工作空间问题研究分析。首先,通过SolidWorks进行建立新型磨机换衬板机械手结构的三维模型;其次,采用D-H法进行建立机械手的运动学方程并求解,并使用MATLAB Robotics Toolbox工具箱进行运动学模型验证;最后,采用蒙特卡洛法和基于SimMechanics建模仿真法进行工作空间对比分析,得到机械手末端手抓的工作空间点云图基本一致。对比分析结果表明与机械手本体设计参数相符合,从而验证了设计的新型磨机换衬板机械手结构的合理性。
新型磨机换衬板机械手;正运动学;工作空间;蒙特卡洛法;MATLAB
0 引言
在加工矿石过程中,磨机是矿山工业中主要的矿料研磨设备,由于磨机长期在重载下工作,其安装在磨机内部的衬板极易被磨损破坏。在实际现场操作中,人工更换一次磨损衬板需要花费大量时间,其不仅效率低下、降低经济效益,且极不安全[1]。针对目前存在的问题,设计一种全新的磨机换衬板机械手虚拟样机模型,通过理论和仿真验证该机械手结构设计的合理性。
当前,用于机械手工作空间求解的方法众多,其中几何法是以绘制几何图形为目的进行求解机械手工作空间的边界,其主要优点是直观性比较强,但需要受机械手自由度数目的约束[2];解析法一般是采用多次包络方式进行求解机械手工作空间边界,在机械手关节数目不多的情况下常被广泛采用[3];数值法一般是采用计算机械手工作空间边界曲面上的特征点,构成边界曲面[4,5],其中,蒙特卡洛法是求解中最常用的一种数值方法,此方法不仅简单,具有代表性,且常适用于工程问题。
1 新型磨机换衬板机械手的结构模型
球磨机筒体内部直径4.8m,筒体入口直径1.1m,筒体长度12m,衬板质量187kg。依据实际使用要求,运用SolidWorks软件设计一种本体为6个自由度的新型磨机换衬板机械手,包括吊臂的回转、变幅、伸缩和一个具有3姿态调整能力的末端手抓机构,设计的机械手本体结构三维模型如图1所示。
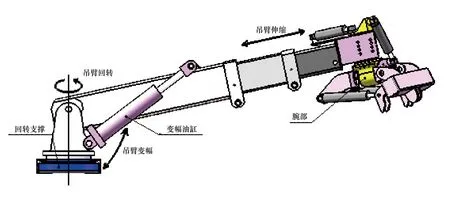
图1 磨机换衬板机械手结构三维模型图
2 磨机换衬板机械手运动学分析
2.1 运动学方程的建立与求解
机械手的正运动学是在给定机械手各个关节角度值或移动距离的情况下,通过一系列计算,推出末端手抓在笛卡尔空间中的位置与姿态。通过采用D-H法[6],建立磨机换衬板机械手坐标系简图,如图2所示。
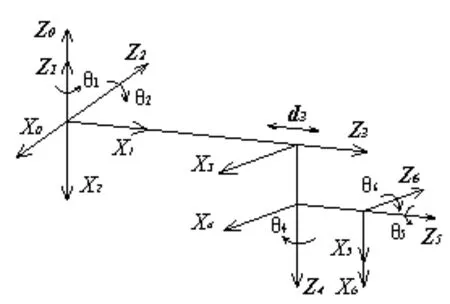
图2 磨机换衬板机械手连杆坐标系简图
凭据机械手D-H连杆坐标系和已知条件,得出表1所示的机械手相对应连杆的具体参数值。

表1 磨机换衬板机械手D-H参数
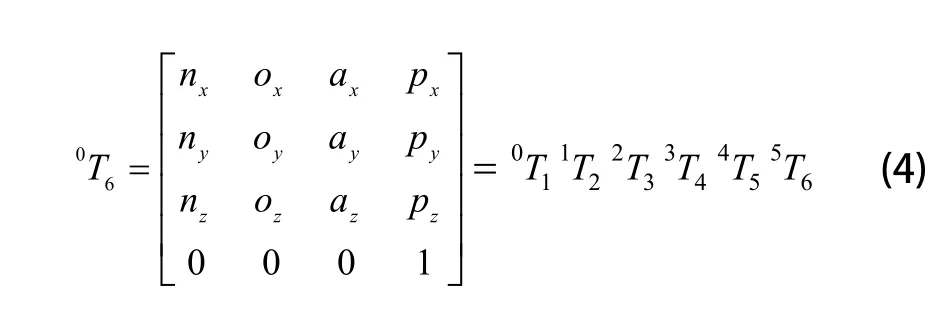
采用Ai矩阵进行机械手相邻连杆i对于连杆i-1的相对位姿变换矩阵:

D-H坐标系下的连杆6的坐标系表示的是磨机换衬板机械手的末端手抓,可以采用表示与连杆i-1坐标系的相对位姿关系,即为:

得出变换矩阵为:
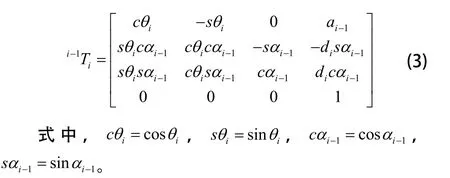
根据表1中磨机换衬板机械手各个连杆的参数和式(3)可以把式(2)改写为:
根据以上各式,最终求解得出机械手末端手抓位置:
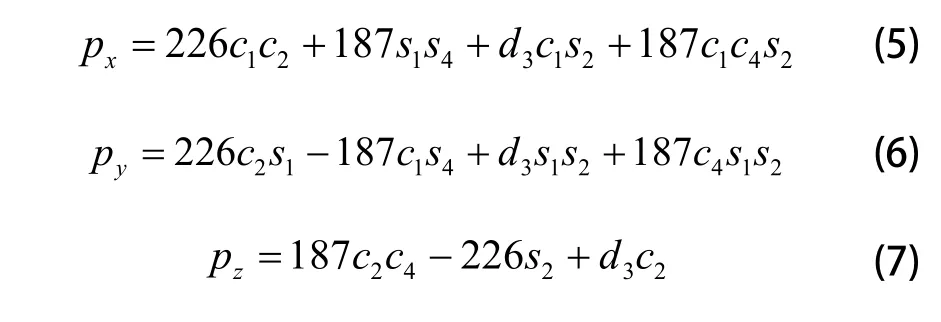
式中,ci,si(i=1,2,3,4,5,6)分别表示
2.2 运动学模型的验证
给定磨机换衬板机械手任意关节变量qi数值,代入式(5)、式(6)、式(7)中,求出机械手末端手抓的位置px、py、pz,调用MATLAB Robotics Toolbox工具箱中的drivebot函数进行仿真分析[7]。图3为磨机换衬板机械手关节驱动图和仿真模型图,其中,关节变量偏移值0ffset为θ1=π/2,θ2=π/2,d3=1000mm,θ1=0°,θ5=π/2,θ6=0°,为机械手初始位置。仿真过程中,输入关节变量qi的具体数值,在关节驱动图中得到x, y, z的具体数值与代入求解的数值进行比较。
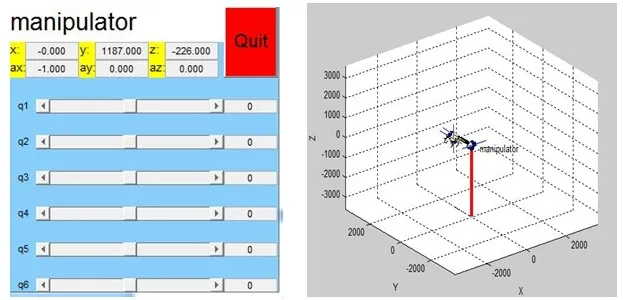
图3 磨机换衬板机械手关节驱动和仿真模型图
随机选取三组关节变量q值,分别为:
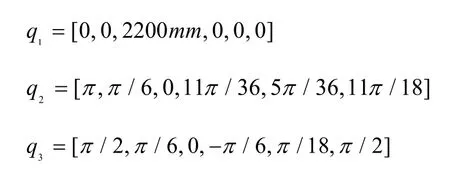
代入磨机换衬板机械手末端手抓位置求解和使用MATLAB Robotics Toolbox仿真求解,得出表2中的各组比较数值。

表2 运动方程解和仿真解比较
结果显示分析,采用两种方法得出的磨机换衬板机械手末端手抓位置向量大体一致,从而也说明了所设计的磨机换衬板机械手的末端手抓所达位置的合理性和正确性。
3 磨机换衬板机械手工作空间分析
3.1 基于蒙特卡洛法工作空间分析
蒙特卡洛法是一种采用随机抽样进行数学数值问题处理的方法,已被普遍应用在解决工程问题中[8]。此种方法不仅运用简单,并且可以使用图像显示,结果清晰,可以运用在求解各种关节类型机械手的工作空间问题中[9]。原理式为:

qi为机械手关节变量(转动关节类型采用θi表示,移动关节类型采用di表示);Q为关节空间;WR为工作空间,由广义坐标qi决定,为三维空间。
求解详细步骤如下:
1)利用机械手的正运动学方程进行求解,进而得出磨机换衬板机械手末端手抓的位置向量值

式中i为关节数目,取1~6;θimin和dimin为第i转动或移动关节变量下限;θimax和dimax为第i转动或移动关节变量上限;N为采样数。
3)将得到的伪随机值代入式(5)、式(6)、式(7)中,得出机械手末端手抓的位置,再使用MATLAB软件绘制机械手末端点具体位置,得到机械手工作空间点云图。
取随机点数N=50000,即机械手末端产生50000个随机位置,使用MATLAB获得磨机换衬板机械手的工作空间三维点云图和各个平面的投影视图,如图4所示。

图4 基于蒙特卡洛法的磨机换衬板机械手的工作空间图
图4 中,磨机换衬板机械手具体工作空间显示范围为:x∈(-3387,3387)mm,y∈(-3387,3387)mm,z∈(-2000,1500)mm,选取机械手任意关节值,代入机械手末端位置px、py、pz中得出,理论计算所得的数值都在仿真所得的点云图范围内。得出基于蒙特卡洛法得出的具体结果与实际理论计算数据相符,也验证了基于蒙特卡洛方法进行机械手工作空间分析的正确性。
3.2 基于SimMechanics建模的工作空间分析
采用SimMechanics建立磨机换衬板机械手的仿真模型图,其中模型的角度驱动值来自定义产生的随机数值,仿真结果输出为机械手所求实际工作空间[10]。
3.2.1 改进的混合同余法产生随机数原理
传统的随机数产生是用rand()函数,得到的随机数是伪随机数,其可能存在着长周期相关和序列不均匀等问题。本文采用一种基于改进的混合同余法进行生成随机数值,设N=300,区间为[0,1],依据公式得到300个随机数序列点图,图形显示随机序列均匀性较好,如图5所示。

图5 改进混合同余法产生的随机数序列点图
改进的混合同余法公式如下所示:

式(8)、式(9)中,mod为求余函数,M为模数,A为乘数,N为采样数,Xn在(0,M)内服从均匀分布随机变量,Yn在(0,1)内服从均匀分布随机变量。
通过多项实验数据选取对照得出,选取A=2045,M=220时所得到的随机数序列在实际求解中显示的效果较为理想。
3.2.2 基于SimMechanics仿真模型的建立
采用SimMechanics对机械手进行建模仿真,通过研究机械手结构简图,记录末端手抓坐标点,将数值输入到MATLAB中进行数据处理,最终获得机械手运动工作空间点云图。SimMechanics仿真求解机械手工作空间具体步骤如下:
1)确定机械手仿真参数,进行其结构建模;
2)添加驱动类型,采集末端手抓位置坐标信息;
3)进行数据采集、处理,得出工作空间图形。
磨机换衬板机械手结构建模如图6所示。
图6中,一个地Ground模块表示机械手固定机座,五个转动关节R1、R2、R4、R5、R6模块表示机械手的转动关节、一个移动关节P3模块表示机械手的一个移动关节、六个J1~J6 Actuator模块分别驱动六个关节,另外, 六个刚体模块L1~L6代表杆件1~6,一个Body Sensor模块记录末端手抓位置[11]。
参照机械手D-H连杆参数进行设置模型仿真参数,关节角度输入量采用改进的混合同余法产生的随机数值代入,即转动关节为移动关节为
3.2.3 基于SimMechanics建模的工作空间图形生成
根据SimMechanics结构模型,结合机械手工作空间的求解步骤,最终获得机械手工作空间点云图,如图7所示。

图6 基于SimMechanics的磨机换衬板机械手结构模型
【】【】

图7 基于SimMechanics建模的机械手的工作空间图
4 结论
在相同的电脑环境下,从仿真用时上看,选取50000随机点,使用蒙特卡洛法仿真运行时间为24.634s,使用基于SimMechanics建模的最终的仿真运行时间确是4.532s。虽然改进混合计算法和蒙特卡洛法仿真工作空间形状相差不大,但求解速度明显提高很多,说明了基于SimMechanics建模的在数据处理上具有很大优势。
对比两种方法,得出的磨机换衬板机械手的工作空间点云图基本一致,满足实际设计机械手安装衬板所需要达到的工作空间位置,从而也进一步验证了实际设计的新型磨机换衬板机械手结构的有效性和合理性。
[1] 李勇,王继新,郝万军,等.基于虚拟样机技术的大型磨机换衬板机械手结构分析[J].中国工程机械学报,2009,7(2):157-160.
[2] Moldovan L. Geometrical Method for Description of the 6-PGK Parallel Robot’s Workspace[A].International Conference on Complexity and Intelligence of the Artificial and Natural Complex Systems,Medical Applications of the Complex Systems,Biomedical Computing.IEEE Xplore[C],2008:45-51.
[3] Wen-Fu X U, Li-Tao L I, Liang B, et al. Workspace Analysis of Space 3R Robot[J].Journal of Astronautics,2007,28(5):1389-1394.
[4] 陈章平,刁燕,姚林,等.微创手术机器人的工作空间分析[J].机械设计,2010,27(10):70-72.
[5] CAO Y, LU K,LI X, et.al. Accurate numerical methods for computing 2D and 3D robot workspace[J].International Journal of Advanced Robotic Systems,2011,8(6):1-13.
[6] 刘祚时,童乐,黄高荣.磨机换衬板机械手结构设计及运动学分析[J].机械设计与制造,2016(7):85-88.
[7] 刘晶晶,彭俊泉,刘新华.基于MATLAB的串并混联7-DOF仿人机械臂正运动学分析及仿真[J].机械传动,2015,39(7):59-62.
[8] 李亚玮,黄晋英.八自由度机械臂正运动学及工作空间分析[J].机械传动,2016,40(4):94-96.
[9] 李瑞峰,马国庆.基于Matlab仿人机器人双臂运动特性分析[J].华中科技大学学报(自然科学版),2013,41(s1):343-347.
[10] 许卫斌,平雪良,应再恩,等.6R型串联机器人工作空间快速求解方法[J].机械设计,2013,30(6):28-31.
[11] 赵燕江,张永德,姜金刚,等.基于Matlab的机器人工作空间求解方法[J].机械科学与技术,2009,28(12):1657-1661.
Workspace analysis of a new relining manipulator on mill
YIN Na, LIU Zuo-shi, TONG Le, DU Ren-zhao
TH241.2
:A
1009-0134(2017)06-0091-05
2017-02-11
国家自然科学基金(71361014);江西省重点科技计划项目(20151BBE50038);江西省研究生创新专项资金项目(YC2015-S283)
殷娜(1990 -),女,安徽亳州人,硕士研究生,研究方向为机器人技术和自动化技术。
猜你喜欢
矿山机械(2022年8期)2022-09-01
设备管理与维修(2022年15期)2022-08-28
建井技术(2022年2期)2022-07-30
北京大学学报(自然科学版)(2022年2期)2022-04-09
防爆电机(2021年3期)2021-07-21
建材发展导向(2021年6期)2021-06-09
水泥工程(2020年4期)2020-12-18
建材发展导向(2020年16期)2020-09-25
小哥白尼(趣味科学)(2020年6期)2020-05-22
中国矿山工程(2019年5期)2019-10-28
