基于MPC的军用重型车辆ACC系统设计与仿真
2017-10-17 03:41高锦虎忠史小川刘宏亮
汽车实用技术 2017年18期
高锦,虎忠,史小川,刘宏亮
(陕西重型汽车有限公司,陕西 西安 710200)
基于MPC的军用重型车辆ACC系统设计与仿真
高锦,虎忠,史小川,刘宏亮
(陕西重型汽车有限公司,陕西 西安 710200)
自适应巡航控制(ACC)是一种可以有效减轻驾驶员的驾驶疲劳,提高车辆安全性的主动安全技术。对于长途机动的军用车辆具有广阔的应用前景。文章以陕汽某型号三代重型高机动军用车辆为目标车型,设计了基于模型预测控制(MPC)的车辆自适应巡航控制系统。并依据目标车型的性能参数及ACC系统的控制策略,以车辆动力学仿真软件TruckSim和Simulink为平台,建立了目标车型的整车纵向动力学和控制策略联合仿真模型。仿真研究所设计的ACC系统在不同的巡航工况下对前方目标车辆的跟随能力及自车的驾驶舒适性。仿真结果表明,文章设计的ACC系统能使自车在保持一定安全车距的前提下,较好的跟随前方目标车辆,同时提供良好的驾驶舒适性。
自适应巡航控制;模型预测控制;纵向动力学模型;联合仿真
Abstract:Adaptive cruise control(ACC)system belongs to active security technology, It aims at reducing the workload of driver and improving vehicle safety. The technology have widely developing prospect for military vehicle that used on long-distance transport. This article choose a 3rd heavy expended mobility tactical vehicle as the target vehicle, designed the adaptive cruise control system based on model predictive control(MPC). On the platform of TruckSim and MATLAB/Simulink, longitudinal dynamic model of vehicle and control model of ACC was established. Finally a co-simulation is conducted on typical ACC driving condition. The simulation results show that the ACC system designed can well follow the speed change of leading vehicle while keeping a certain distance, and has a better controllabitity for the driver.
Keywords: Adaptive Cruise Control; Model predictive control; longitudinal dynamic model; Co-simulation
CLC NO.: U467 Document Code: A Article ID: 1671-7988 (2017)18-34-04
前言
车辆自适应巡航控制(ACC)系统可有效减轻驾驶员的精神负担,减少因驾驶员的失误引起的交通事故,提高行驶的安全性、乘坐舒适性,并改善交通流等。当道路前方无车辆时,ACC系统会按照一个事先设定的速度行驶,即传统的定速巡航模式;一旦车载传感器检测到前方有车辆时,ACC系统会通过调整车速,保证一个安全的跟车间距行驶[1]。
本文以陕汽某型号 8×8重型高机动军用车辆为目标车型,在MPC的框架基础上,设计了一个兼顾安全性、跟车性、舒适性的ACC系统。并通过TruckSim和Simulink仿真平台,建立了能够模拟车辆运行工况,反映系统动态特性,同时兼顾模型精确性的汽车动力学系统模型[2]。联合仿真研究所设计的ACC系统在不同的巡航工况下对前方目标车辆的跟随能力及自车的驾驶舒适性。
1 ACC系统结构设计
1.1 总体方案设计
在参考乘用车辆成熟技术的基础上,设计了适用于军用越野车辆的ACC系统。该系统的目标车型为陕汽某型号重型越野车辆,其主要技术参数如表1所示:

表1 整车技术参数
图1为所设计的ACC系统结构示意图。系统主要由人机交互界面、信息采集单元、信号控制单元以及执行单元组成。其中人机交互界面包括 ACC功能选择开关、巡航车速设置开关、安全时距设置开关和系统故障灯。信息采集单元的功能是通过传感器对车辆前方一定范围内的环境进行感知,测量输出前方物体的速度、位置等信息。常用的环境感知传感器包括超声波传感器、红外线传感器、激光雷达、毫米波雷达、微波雷达、立体摄像机等,通过分析比较各类传感器的优缺点,本系统采用 77GHZ的毫米波雷达和摄像机两者相融合的方式对车辆前方物体进行感知。信号控制单元通过实时采集人机交互界面和信息采集单元输出的信号,经过控制算法运算后输出控制命令,控制相应的执行单元,以使车辆保持与前方物体的距离和速度。

图1 ACC系统结构示意图
1.2 关键零部件选型
ACC信号控制单元作为系统的核心部件,其作用是通过采集人机交互界面和信息采集单元的信号,根据系统控制策略输出相应的控制命令。经过分析系统的输入输出及其对信号的响应能力,选用主频为 40MHZ的 MC9S12XEP100为ACC信号控制单元的MCU。该芯片拥有的4路高速CAN通道,最高通讯速率可达 10Mbit/s,能为系统提供高效的信号采集、运算及输出功能。
ACC系统的环境感知传感器主要为激光雷达、毫米波雷达和摄像机,其中激光雷达分辨率高,夜晚工作不受限制,但雨雪雾天分辨率严重降低,并且价格高昂。毫米波雷达虽然价格适中,雨雪雾天对它的测量精度也影响不大,但不能有效识别行人、摩托车、车道线等物体。而摄像头虽可以有效识别行人、摩托车、车道线,但容易受雨雾及光线的影响[3]。经过分析系统的实际需求,采用毫米波雷达和摄像头相融合的方式实现对车辆前方环境的测量感知。系统所选用的传感器技术参数如表2所示。

表2 环境感知传感器技术参数
2 联合仿真系统建模
2.1 整车多体动力学模型
以TruckSim为平台,建立了目标车型的整车模型,该模型能够实时模拟车辆的运行过程,反映其各种运动学特性。它输出给Simulink的信号包括:车辆的纵向速度、加速度和位置等信息。
所选自车模型的制动系统带ABS功能,对模型的传动系、悬架及其他系统参数按目标车型的相应参数进行设置。前车车型为B级掀背式轿车,其模型各项参数全部采用默认值,仅对前车车速变化和制动时间等试验条件进行相应的设置。
2.2 ACC系统控制策略及模型

图2 ACC系统控制策略原理图
本文设计的 ACC系统控制策略采用分层控制结构。在间距策略计算出期望的跟车间距后,上层控制根据传感器检测到的行驶环境决定车辆的期望纵向加速度;下层控制算法则通过控制发动机扭矩和制动减速度,使得车辆最终表现出来的加速度和上层得到的期望加速度一致。现有的 ACC系统上层控制设计大多只考虑安全性和跟车性。然而,作为扮演驾驶员角色的上层控制策略,乘坐舒适性和燃油经济性也是其重要的评价指标[4]。因此,ACC系统的上层控制是一个多目标优化控制问题。模型预测控制(MPC)突破了传统思想束缚,采用预测模型、滚动优化、反馈校正等新的思路设计控制策略,使得控制效果和鲁棒性得到了大大的提高[5]。为此,本系统的上层控制策略基于 MPC框架,设计了一个兼顾安全性、跟车性、舒适性和节油性的多目标 ACC系统上层控制算法。控制策略原理如图2所示:
根据上述控制策略,在 MATLAB/Simulink中建立了安全间距模型、车间相互纵向动力学模型、上层控制模型及下层控制模型。
2.2.1 安全间距模型
安全间距策略,作为 ACC系统的重要组成部分,决定了ACC系统车辆在行驶过程中的跟车间距,为ACC系统的控制算法提供参考间距输入值。本系统采用可变车头时距策略(VTH)[1],其模型如式1所示:


式中,t0、cv为大于0的常数;vrel为前后两车的相对速度。
2.2.2 车间相互纵向动力学模型
传统的相互纵向动力学模型的建模方式大多将车间距、相对速度作为状态变量得到二阶状态方程模型,不考虑前车加速度的扰动。文中在对 ACC系统车间相互纵向动力学建模时,将车间距、本车速度、相对速度、本车加速度、本车加速度变化率作为状态变量,将前车的加速度作为扰动得到了两车间离散的相互纵向动力学模型。
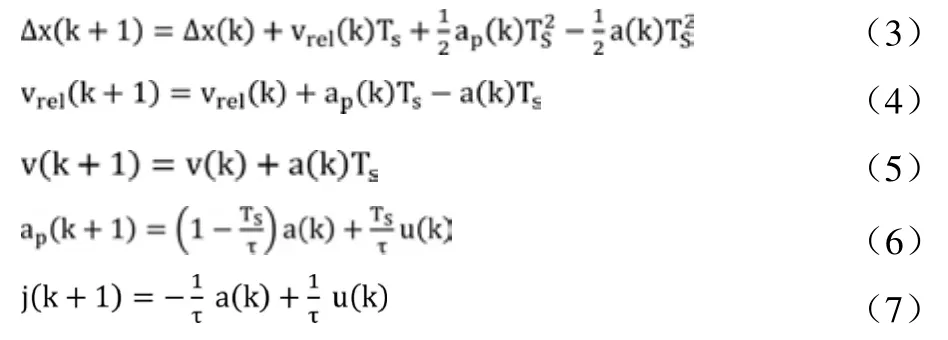
选取车间距误差、相对速度、本车速度、本车加速度、本车加速变化率作为ACC系统的状态变量:

将前车加速度视作ACC系统的扰动,并根据式3~7,得到如下ACC系统的车间相互纵向运动学状态方程:
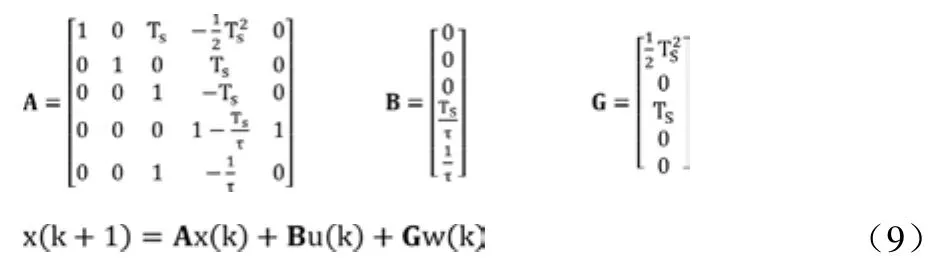
式9即为ACC系统的纵向运动学控制模型。相比于传统的二阶模型,该模型考虑了前车的加速度干扰,更加真实全面地在现了整个系统的动态演化规律。
2.2.3 上层控制模型
在ACC系统多目标上层控制中,控制的目的是使ACC系统车辆在跟前车的过程中满足安全性、舒适性以及燃油经济性。为了实现这些控制目的,本系统分别对各行驶目的进行分析建模,将其转化为相应的系统约束和性能指标,在MPC的框架下设计ACC系统的上层控制算法。
该算法选用间距误差δ(k)、相对速度 vrel、加速度 a(k)以及加速度变化率j(k)组成优化性能指标向量。
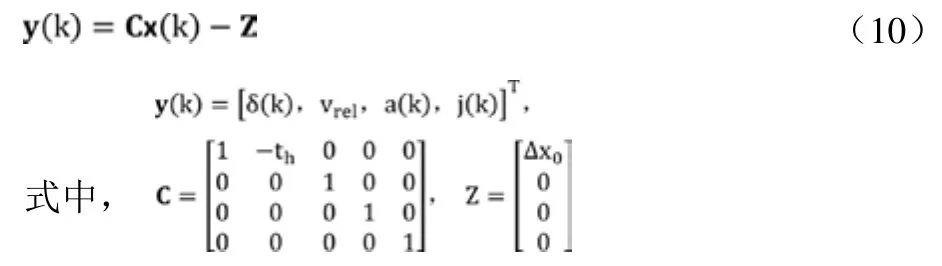
将上节建立的 ACC车间相互纵向运动学模型作为预测模型,对ACC系统的未来行为进行如下预测:
在MPC的框架下,将车辆ACC系统行驶过程中需要优化的多个性能指标的形式写成如下的值函数:

式中,Q和R为权系数,u为控制向量矩阵。

对应的系统约束整理如下:在每一个采样时刻,ACC系统通过车载传感器检测得到当前的行驶环境信息,首先对未来状态进行预测并进行反馈校正,然后通过在线优化相应的多目标性能指标,求取对应的数学规划得到控制序列,并将第一个值施加于控制系统,接着在下一个采样时刻重复该操作。
2.3 联合仿真模型

图3 ACC系统联合仿真模型图
在TruckSim中设置输入端口,包括发动机需求扭矩和制动减速度需求,输出端口包括车辆的位置信息、纵向加速度及速度。完成上述设定后,通过外部接口将车辆模型发送至指定路径下的 Simulink仿真文件中。TruckSim模块即以 S函数的形式增加到Simulink模型库中。通过调用该S函数,并加入控制器模块,即完成联合仿真环境的搭建。如图3所示:
3 ACC系统仿真结果分析
为验证设计的 ACC系统控制算法,选取了急刹车和跟车两个典型场景进行了仿真实验,通过判断行驶过程中ACC系统车辆能否有效避撞来衡量安全性,通过分析速度、车间距的调整及其跟踪性能来评价系统的跟车性,通过分析加速度评价系统的舒适性和燃油经济性。
3.1 急刹车场景仿真分析
该场景考察的是在两车相距较近时,前车突然急刹车,本车能否有效采取有效的措施避免碰撞。仿真结果如图 4、图5、图6所示:

图4 车间距响应曲线
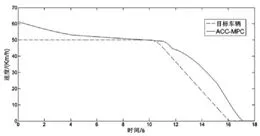
图5 车速响应曲线

图6 加速度响应曲线
根据图4的仿真结果,可以看出前车在急刹车后,两车的间距平滑减小。最终的值保持在2.3m,即未与前车发生碰撞。由图6可知,在整个刹车过程中多目标MPC算法的舒适度评价指标加速度的值保持在 3.5m/以内,大于系统设置的最大加速度值 2m/。这是因为在前车急刹车这样危险的情况下,ACC系统控制算法必须采取剧烈的刹车行为保证行驶的安全。其他性能的优化是其次的。
3.2 跟车场景仿真分析
该场景考察的是当前车以匀速、加速或减速任意工况行驶时,ACC系统车辆能否在保持安全间距的前提下,快速跟随前方车辆速度的变化。仿真试验设置前车先减速后,匀速行驶一段再加速,结果如图7、图8、图9所示:
根据图7的仿真结果,可以看出当前车的速度在不断的变化时,ACC系统车辆始终可以将两车的间距保持在安全距离附近。由图8可知,ACC系统车辆可以良好的跟随前车速度的变化,并可以将车辆的加速度控制在以内,具有很好的乘坐舒适性。
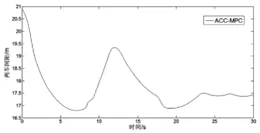
图7 车间距响应曲线
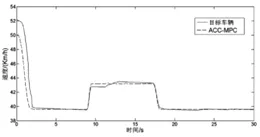
图8 车速响应曲线
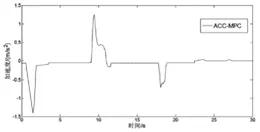
图9 加速度响应曲线
5 结论
仿真试验结果表明:
在急刹车场景下,基于多目标 MPC算法的系统首先保证车辆的安全性,可及时忽略系统对其他性能的优化目标。在跟车场景下,面对前车频繁的变速行为,系统在保证安全性和跟车性的前提下,有效的平滑了系统的动态响应,从而改善系统的乘坐舒适性。
[1] 罗莉华.车辆自适应巡航系统的控制策略研究[M].上海:上海交通大学出版社,2013.33-46.
[2] 李朋,魏民祥,侯晓利.自适应巡航控制系统的建模与联合仿真[J].汽车工程.2012.
[3] 陈慧岩,熊光明,龚建伟等.无人驾驶汽车概论[M],北京:北京理工大学出版社,2013,33-46.
[4] Fancher P,Ervin R,Sayer J.Intelligent cruise control field operation test(final report)[R].Transportation Research Institute, University of Michigan,1998.
[5] Adbullah R, Hussain A,Warwick K, et al.Autonomous intelligent Cruise control using a novel multiple-cotroller Framework incorporating fuzzylogic-based switching and tuning [J].Neurocomputing,2008,71(13):2727-2741.
[6] 吴利军,刘昭度,何玮.汽车 ACC 跟随控制策略的研究[J].汽车工程,2012.
Design and Simulation Of Adaptive Cruise Control For Heavy Military Vehicle Based on MPC
Gao Jin, Hu Zhong, Shi Xiaochuan, Liu Hongliang
(Shaanxi Heavy Duty Automobile Co., Ltd., Shaanxi Xi’an 710200)
U467 文献标识码:A 文章编号:1671-7988 (2017)18-34-04
10.16638/j.cnki.1671-7988.2017.18.013
高锦,学士,助理工程师,就职于陕西重型汽车有限公司。主要从事汽车电子电器产品的设计与开发工作。虎忠,硕士,工程师,陕西重型汽车有限公司。主要从事汽车嵌入式系统开发。史小川,学士,助理工程师,就职于陕西重型汽车有限公司。主要从事汽车电器系统开发。刘宏亮,学士,助理工程师,就职于陕西重型汽车有限公司。主要从事汽车实验、调试工作。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年3期)2022-06-17
福建轻纺(2022年4期)2022-06-01
能源工程(2022年2期)2022-05-23
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
纺织科技进展(2021年3期)2021-06-09
中国测试(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
科技视界(2016年2期)2016-03-30