
一种风机频率稳定控制器的设计及仿真实验
2017-11-04 01:56张建良齐冬莲
实验室研究与探索 2017年9期
张建良, 齐冬莲, 吴 越
(浙江大学 电气工程学院,杭州 310027)
一种风机频率稳定控制器的设计及仿真实验
张建良, 齐冬莲, 吴 越
(浙江大学 电气工程学院,杭州 310027)

提出了基于最大功率跟踪控制和微分控制的频率稳定控制器,建立了电网系统频率和风机有功调节能力之间的联系,并针对所设计的控制器在系统频率稳定方面的影响进行了分析。利用电力系统仿真软件DIgSILENT/PowerFactory搭建了系统仿真实验平台,验证了在系统受扰情况下,所提出的频率稳定控制器可以有效提高系统的频率响应性能。
双馈感应风机; 微分控制器; 最大功率跟踪控制; 频率支撑
0 引 言
近年来,风力发电技术在世界范围内得到了迅猛发展。双馈感应风机通过利用电力电子变流器实现最大功率跟踪(MPPT)控制,从而实现风能的最大化利用。然而在这样的传统控制方式下,风机的机械转速与电网频率之间完全解耦,风机无法灵活调节自身功率以响应系统频率的变化,从而导致风机不具备与传统同步发电机类似的惯性响应能力[1-5]。
随着风电渗透率的不断提高,风能的波动性和不确定性加剧了系统的功率扰动,而在最大功率跟踪控制下,风机却无法利用自身的转子动能为系统提供惯量支撑能力,从而加剧了频率的波动性,对电网的安全稳定运行造成了严重的影响。因此,如何通过在风机和电网之间构造合适的频率控制器,以有效利用风机自身的旋转惯量参与系统功率的调节控制,研究和实现风机在系统频率稳定方面的积极作用已成为学术和工业界亟待解决的问题[6-9]。
在文献[10]中,通过附加频率控制环节实现转子侧换流器的功率控制,使得风机通过提供一定的惯量支撑以实现频率响应能力。文献 [11]中分别利用电网频率的微分和偏差信号构建风机的有功功率控制,以提供虚拟惯量支撑。文献[12]中通过综合虚拟惯量控制与桨距角备用功率控制,配合传统机组实现对微电网内频率跌落的抑制作用。文献[13]中基于风机的数学模型和虚拟惯量控制,搭建模拟风电并网实验系统并进行测试,取得了良好的效果。文献[14-15]中研究了不同风速条件下双馈感应风机的频率支撑水平,并设计相应的频率控制策略实现系统频率调节目标。然而,现有利用风力机实现系统辅助调频的方法,普遍缺乏对风机系统惯量支撑能力的定量和定性分析,以及对系统频率稳定影响因素的讨论。
本文主要针对双馈感应风机的调频能力展开研究,首先提出了基于最大功率跟踪控制和微分控制器的频率稳定控制器,建立了系统频率和有功调节之间的联系,并对风机的惯量支撑能力进行定性和定量描述。然后深入分析了所设计的控制器对系统惯量支撑能力的影响。最后利用电力系统仿真软件DIgSILENT/PowerFactory环境搭建了系统仿真实验平台,并对受扰条件下所设计控制器实现系统频率稳定方面的有效性进行了验证。
1 双馈感应风机频率稳定控制器
1.1双馈感应风机模型
双馈感应风机的组成包括风力机、传动机构、双馈异步发电机(DFIG)、背靠背变流器(RSC和GSC)以及MPPT控制系统等部分,其基本结构如图1所示。

图1 双馈感应风机的基本结构
风力机通过利用巨大的叶片将空气动能转化为机械能,实现对发电机的驱动并发出有功功率。本文采用如下的静态模型刻画风机捕获的机械功率
式中:ρ是空气密度;R是风机叶片半径;vw是实时风速值;Cp是风能利用系数;λ是叶尖速比;ωD是风机的转子转速;θ是桨距角。通常情况下,如果Pwind低于额定功率值,桨距角一般保持在0°,这样,风能利用系数Cp是叶尖速比λ的函数。在桨距角一定的情况下,可以通过调节转子转速到达最优转速值,以获得风能利用系数的最大值,实现风能的最大捕获,如图2中的A所示。任何偏离最优转速值将导致捕获风能机械功率的下降,如图2的B和C点所示。

图2 风机运行曲线图
1.2双馈感应风机频率稳定控制器结构
双馈感应风机根据风速的不同,采取不同的控制方式,以实现最大风能捕获能力和系统稳定运行的目标。具体的,当风速低于额定风速时,机组采取最大功率跟踪控制算法以获得最大有功出力;而当风速高于额定风速时,机组将启动桨距角控制以保护风机安全运行,并限制有功出力水平在额定功率值。双馈感应风机的传统功率控制策略如图3所示。

图3 双馈感应风机的传统功率控制
电力系统调频主要依靠具有特殊功能的调频发电装置,而变速风机最大的优势在于变换转速,因此可通过转子旋转动能的吸收或释放以提供虚拟惯量支撑,实现对系统暂时的频率支撑能力,从而避免传统频率无差调节过程中风能的大量浪费。接下来将研究利用系统频率偏差信号,实现双馈感应发电机的惯量支撑能力。风机的转子运动方程表示如下:

(3)
式中:ωD为转子转速;HD是风机惯性时间常数;Pwind、Pref分别为风力机捕获的风能和由MPPT控制所得的风机有功功率参考值。
为响应交流电网频率变化以提供相应的频率调节能力,风电场必须实现有功功率的灵活调节。通过利用电网频率偏差信号实施辅助功率控制Pad,则风机的功率控制律变为:
PWF=Pad+Pref
(4)

(5)
式中:KD为微分控制器的比例参数;Δf是系统频率偏差信号;PWF为传递到交流系统的有功功率值;Pad为反映由频率偏差产生的功率调节值。一般来说,有很多种控制方法可以实现此处的功率调节值Pad,本文基于实现的方便性、稳定性和成本问题,采取微分控制器(D控制器)实现风机对系统频率波动的跟踪控制Pad。本文提出的频率稳定控制器如图4所示,其中LPF是低通滤波器,用作对微分环节下高频噪声的滤除。

图4 频率稳定控制器
1.3风机频率稳定能力的定性分析
通过1.2节内容可知,在频率稳定控制器作用下,可以将等式(3)中风机有功输出值Pref用PWF代替:
(6)
通过模拟同步发电机的有效惯量,可得:

(7)
式中,HW为风电场提供的虚拟有效惯量,为简便起见,下文中一律用f代替fWF表示系统频率信号。假定风速恒定并且桨距角并不启动,那么转子转速变化动态过程中,Pwind的变化很小基本可以忽略,从而转子动能可全部用于系统的惯性支撑,可得
(8)
将上式两边积分,并在转子起始转速ωD0处利用Taylor展开,有:
(9)
从式(9)可知,风场惯量支撑能力大小与转子转速有关:转子转速偏差越大,风场所提供的惯量越大,对系统频率的支撑能力也越强。同时可知风机的起始转速对惯量支撑能力也有很大的影响:起始转速越大,风场所提供的惯量也越大,对系统频率的支撑能力也越强。
1.4风机频率稳定能力的定量分析
综合表达式(3)~(5)可得:
(10)
式中,PWF0为风电场起始有功功率。将式(10)的两端积分后可得:

(11)
从而可得风场所能提供的有效虚拟惯量HW的表达式为:

(12)
式中,最大功率跟踪(MPPT)控制对HW的影响由下式表示:

(13)
而微分控制器对HW的影响由下式表示:

(14)
2 最大功率跟踪控制器对频率稳定能力的影响分析
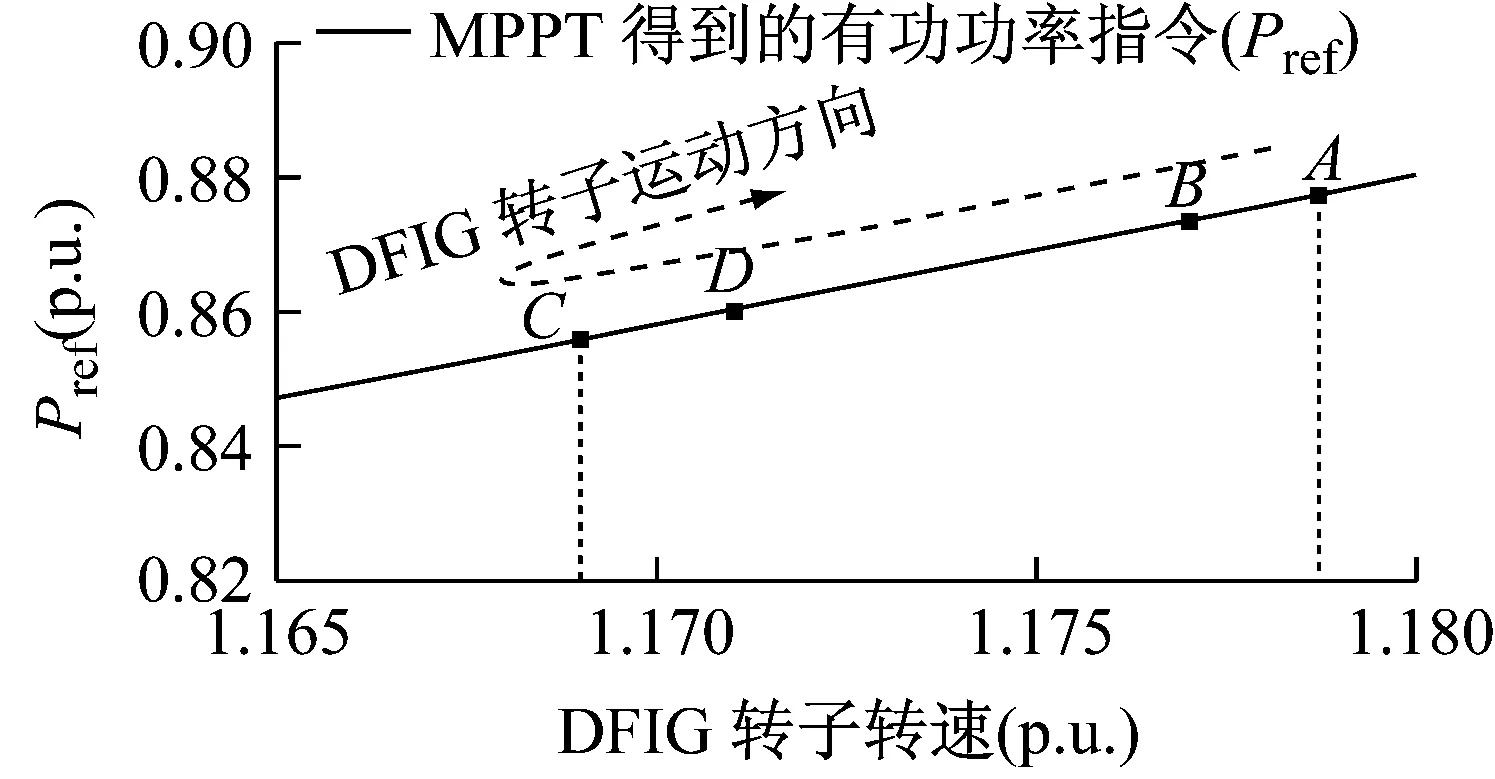
如图2所示,根据MPPT控制算法,在不同风速下风机有功参考值Pref是不同的。连接不同风速值下的最大功率点,便得到如图5所示的风机最大功率捕获曲线,可以看到不同风速条件对风机惯量水平HW的影响是不同的,从而对系统频率的支撑能力也是不同的。现将具体分析不同风速下的最大功率跟踪控制对频率稳定能力的影响。
(1) 中等风速下MPPT控制对频率支撑的影响(图5中B—D段)。为了响应交流系统频率下降事件,风机将通过微分控制器来增大PWF,其后果将导致风机转速ωD下降,从而引起Pref的下降,故F1中的分子为正值,因此F1的表达式为负。从而可知在中等风速区域,MPPT控制将对频率稳定支撑具有不利的影响。
(2) 在低风速下MPPT控制对频率支撑的影响(图5中A—B段)。在低风速条件下,MPPT曲线斜率比较陡峭,因此转子转速的微小变化将造成有功参考值Pref的大范围变化。考虑到MPPT控制对系统频率支撑能力的不利影响较大,导致不能抵消由微分控制器的引入所造成的Pad的增加,因此在此区域内微分控制器的影响可忽略。由于低风速下转速变化很小,HW约等于0,即风机在低风速下基本不提供系统频率的支撑。
(3) 在高风速下MPPT控制对频率支撑的影响(图5中D—E段)。在高风速条件下,风机的有功出力Pref保持恒定额定功率处,因此当电网频率跌落事故发生时,由于风机出力不能高于额定值,微分控制器并不起作用,故风场不能提供任何频率支撑能力;当电网频率出现上升事件时,将启动桨矩角控制以阻止转速持续上升,因此,MPPT控制对系统频率支撑没有不利影响,而风场提供的惯量仅仅来自于微分控制器。

图5 风机最大功率跟踪曲线
3 微分控制器对系统频率支撑能力的影响分析
根据等式(5)和(14)可知,微分控制器通过改变Pad而使得F2具有特定的表达形式,从而最终实现对频率支撑能力产生影响。因此,利用微分控制器可以追踪系统频率的波动,并实现对风机有功功率的调节,在微分控制器作用下的虚拟惯量部分为
F2=

(15)
同样地,只有在KD为负值时,F2才为正值。同时可知,F2为恒定值并且不受系统频率变化的影响,因此微分控制器作用下的HW为:

(16)
4 仿真实验平台构建及结果分析
为了验证所设计的控制器对系统频率的支撑作用,在电力系统专业仿真环境DIgSILENT/PowerFactory中,搭建如图6所示的系统频率稳定测试平台。具体的,该测试平台包括一个300 MW的风场和一个弱交流系统。风场由150台容量为2 WM的双馈感应发电机组成,弱交流系统含有一台同步电机,以及一个固定负载PL1+jQL1和可变负载PL2+jQL2,同步电机与风电场共同向弱交流系统输送电能。同步电机及系统相关参数如下:风场额定容量SWF=300 MW,微分控制器参数KD=-5,固定负载PL1+jQL1=400 MW+100 Mvar,可变变载PL2+jQL2=40 MW+10 Mvar,发电机额定容量Sg=300 MVA,发电机机端电压Ug=13.8 kV,发电机惯性时间常数Hg=4 s,原动机调差系数RP=0.04,原动机时间常数TW=8.405 s,伺服电机时间常数0.5,励磁调节器增益400,励磁时间常数0.01。
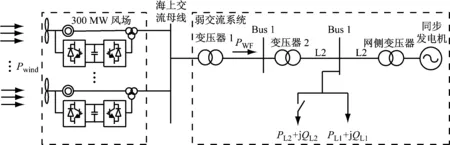
图6 系统仿真测试平台结构图
在频率控制器作用下的风场惯量响应特性曲线如图7所示。在t=5 s,如图7中的A点所示,可变负载PL2+jQL2投入系统,系统频率随之下降。为了应对频率下降的影响,则需要启动微分控制器。由图7(d)所示,Pad一直增大直至到B点处达到最大值。点A,B和D所围成的面积表示由控制器所激发的附加能量,如图7(d)中的S1+S2面积所示。可以看到,在系统的功率平衡点C处,有PWF=Pref,并且超前于频率最低点D。为了便于分析,以C点为分界线,将系统的惯量支撑作用HW分割成两个时间段:tA到tC段和tC到tD段。在tA到tC阶段,风机转速保持不断下降的趋势,而系统惯量HW一直保持为正值。正如图7所示,由A、B和C点包围的面积S1位于故障前功率值以上,可知在此时段内风机向系统提供正惯量支撑作用。然而在tC到tD阶段,由于转速在C点后逐渐上升,系统惯量HW为负值,表示为系统提供负的惯量。正如图7(b)所示,由C、D和E包围的面积S3表明在此区间内风机向系统提供负的惯量作用。通过对比分析图7(e)中电网频率特性曲线可知:①在频率下降的初始阶段,在微分控制器作用下频率的下降速度要慢,并且下降幅度也小;②在频率的后期恢复阶段,由于微分控制器的作用,风机转速变化范围较小,导致系统频率最低点较高,显示本文的频率控制器有助于增强系统的频率支撑能力。
(a)

(b)

(c)

(d)

(e)
图7 频率稳定控制器作用下系统频率响应特性
5 结 语
针对双馈感应风机在采用传统时对电网系统频率支撑的不足,本文提出了一种基于MPPT控制和微分控制的系统频率稳定控制器,并分析了其对系统频率稳定的影响。通过在DIgSILENT/PowerFactory中搭建系统仿真实验平台并进行仿真实验,验证了所提出的频率稳定控制器能够消除传统MPPT单一控制对系统频率支撑的不利影响。随着风力发电渗透率的不断提升,通过在双馈感应风机中加装频率控制环节,将对未来电力系统的频率稳定以及系统可靠运行具有重要的意义。
[1] 贺益康,胡家兵,徐 烈.并网双馈异步风力发电机运行控制[M].北京:中国电力出版社,2012.
[2] 李 杨,李华强,肖先勇,等.风特性对风力发电机组输出功率的影响[J].可再生能源,2012,30(5):34-41.
[3] Morren J,Pierik J,de Haan S W H.Inertial response of variable speed wind turbines[J].Electric Power Systems Research,2006,76(11):980-987.
[4] Lalor G,Mullane A,O’ Malley M.Frequency control and wind turbine technologies[J].IEEE Transactions on Power Systems,2005,20(4):1905-1913.
[5] 唐西胜,苗福丰,齐智平,等.风力发电的调频技术研究综述[J].中国电机工程学报,2014,34(25):4304-4314.
[6] 刘 巨,姚 伟,文劲宇,等.大规模风电参与系统频率调整的技术展望[J].电网技术,2014,38(3):638-646.
[7] 石一辉,张毅威,闵 勇,等.并网运行风电场有功功率控制研究综述[J].中国电力,2010,43(6):10-15.
[8] Zhang Z S,Sun Y Z,Lin J,etal.Coordinated frequency regulation by doubly fed induction generator based wind power plants [J].IET Transaction on Renewable Power Generation,2012,6(1):38-47.
[9] 蒋佳良,晁 勤,陈建伟,等.不同风电机组的频率响应特性仿真分析[J].可再生能源,2010,28(3):24-28.
[10] Ekanayake J,Jenkins N.Comparison of the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency[J] . IEEE Transactions on Energy Conversion,2004,19(4):800-802.
[11] Gautam D. Control strategy to mitigate the impact of reduced inertia due to doubly fed induction generators on large power systems[J]. IEEE Transactions on Power Systems, 2011, 26(1):214-224.
[12] 赵晶晶,吕 雪,符 杨,等.基于双馈感应风力发电机虚拟惯量和桨距角联合控制的风光柴微电网动态频率控制[J].中国电机工程学报,2015,35(15):3815-3822.
[13] 侍乔明,王 刚,马伟明,等.直驱永磁风电机组虚拟惯量控制的实验方法研究[J].中国电机工程学报,2015,35(8):2033-2042.
[14] 韩民晓,崔军立,姚蜀军. 大量风电引入电网时的频率控制特性[J]. 电力系统自动化, 2008, 32(1):29-33.
[15] 何成明,王洪涛,孙华东, 等. 变速风电机组调频特性分析及风电场时序协同控制策略[J]. 电力系统自动化, 2013, 37(9): 1-6, 59.
DesignandSimulationofFrequencyControllerforDoublyFedInductionGenerator
ZHANGJianliang,QIDonglian,WUYue
(College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
In this paper, the problem of frequency support capability for doubly fed induction generators (DFIGs) in the future grid with high penetration of wind power is discussed, and a frequency stability controller based on maximum power tracking control and differential control is proposed. The relationship between grid frequency and frequency support capability of DFIGs is built, then the influence of the designed controllers on system frequency stability is analyzed. And the power system simulation software DIgSILENT/PowerFactory is used to set up the system simulation experiment platform, the result proves that the proposed frequency stability controller can effectively improve the frequency performance of the whole system.
doubly fed induction generator; differential controller; maximal power point tracking control; frequency support
TM 614
A
1006-7167(2017)09-0087-05
2016-11-21
国家自然科学基金项目(U1509218);浙江省自然科学基金项目(LY15E070001);浙江省教育厅科研项目(Y201533326);浙江省实验室工作研究项目(YB201732);浙江大学本科实验教学自制仪器设备项目;德州仪器(TI)产学合作协同育人项目,美国国家仪器(NI)产学合作协同育人项目。
张建良(1984-),男,河南新野人,博士,讲师,研究方向为信号分析与处理、新能源发电系统的优化控制。Tel.:13758247189;E-mail:jlzhang@zju.edu.cn
猜你喜欢
大电机技术(2022年3期)2022-08-06
现代电力(2022年2期)2022-05-23
防爆电机(2021年6期)2022-01-17
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
中国惯性技术学报(2018年1期)2018-05-10
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
广东技术师范大学学报(2016年5期)2016-08-22
中北大学学报(自然科学版)(2015年6期)2015-12-02
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
