
精细农业无线传感器网络终端节点定位研究
2017-12-15 06:49王立舒张丽影张智文王树文
农机化研究 2017年1期
王立舒,张丽影,张智文,杨 鹏,王树文
(东北农业大学 电气与信息学院,哈尔滨 150030)
精细农业无线传感器网络终端节点定位研究
王立舒,张丽影,张智文,杨 鹏,王树文
(东北农业大学 电气与信息学院,哈尔滨 150030)
针对现有精细农业传感器网络监测系统中的终端节点模块定位算法易陷入局部最优、定位精度低等缺陷,提出了一种改进无线传感器网络节点定位算法针对大豆农田ZigBee无线网络终端节点进行定位,采用高斯数据筛选模型修正接收信号强度测量距离。同时,在标准粒子群算法基础上引入混合变异策略,运用混合策略中各个变异函数的优势在算法搜索过程中作用于种群,使粒子跳出局部最优,保证全局搜索遍历能力。大豆实验田试验表明:标准粒子群定位算法和本文提出的混合变异粒子群定位算法的总体定位平均误差分别为1.746 1m和1.170 8m,表明改进方法的定位精度更高。
传感器网络;RSSI测距;混合变异粒子群算法;定位;精细农业
0 引言
随着精细农业的迅速发展,无线传感器网络的应用成为采集农田信息、提高农田管理水平及增加作物产量的重要手段[1]。在应用农业无线传感器网络进行测量过程中,传感器终端节点定位是重要环节,大量节点必须确定位置信息才能进行有效的环境信息监测[2]。
近年来,智能算法在农业无线传感器网络节点定位上的应用越来越多。文献[3]引入标准粒子群算法进行定位,相比于模拟退火法表现出了更好的定位效果并且降低了成本,但并未针对无线传感器网络进行修改。文献[4-5]在引入标准粒子群算法的基础上进行改进:文献[4]首先应用Dv-distance方法估计节点位置,再应用PSO算法进行定位;文献[5]将PSO与Dv-hop算法结合对节点进行定位,但定位精度有待提高。
本文主要针对标准粒子群算法具有定位精度差及容易陷入局部最优等问题提出一种改进粒子群节点定位算法,并应用RSSI测距方式进行节点距离计算,在粒子群算法搜索过程中引入混合变异策略,提高进化性能和定位精度,以采集精确的环境信息。
1 RSSI测距
1.1 RSSI信号测距模型
考虑到由于多路径反射、障碍物阻挡等复杂因素,采用Shadowing模型进行农业中传感器节点测距[6]。Shadowing模型的表达式如式(1)所示,以dBm作为计量单位。则有
(1)

1.2 测距误差校正
由于实际农业环境变化复杂,测量精度不高,误差较大,本文采用高斯数据筛选模型剔除测量中的误差值[7-8]。其具体的操作公式为
(2)
(3)
通过式(2)和式(3)可求得某一未知节点RSSI的测量均值m和平方差σ2,将得到的数值应用于式(4)即可得到每个RSSI值对应的分布密度函数;再根据式(4)确定RSSI的选值范围,本文选择临界点为0.2即保留区间[0.2 1]之间的数值。则有
(4)
将筛选出的RSSI值按式(5)进行均值求解,最后根据2.1中公式计算得到较精确的测量距离为
(5)
其中,n为节点接收的RSSI值的个数;m为测量均值;xi为RSSI测量值;k为筛选出的RSSI测量值的个数;ti为筛选出的RSSI测量值。
2 改进粒子群定位算法
2.1 混合变异策略
在标准粒子群算法中包含m个粒子,搜索空间中的每个粒子都作为待优化的可行解,且通过粒子间的协作与竞争寻求问题的最优解。每个粒子根据式(6)和式(7)在搜索过程中更新自己的位置和速度,则有
vid(t+1)=ωvid(t)+c1r1[pbid(t)-xid(t)]+
c2r2[gbd(t)-xid(t)]
(6)
xid(t+1)=xid(t)+vid(t+1)
(7)
其中,ω为惯性系数;c1、c2为学习因子;r1、r2为服从U(0,1)分布的随机数;t为迭代次数。
标准粒子群算法易实现,但容易陷入局部最优,收敛速度慢且精度变低[9-11]。本文提出的混合变异策略将Gaussian函数和柯西函数结合在一个算法中,个体根据适应度的大小在不同阶段使用不同策略,充分发挥各函数的优势[12-15]。在算法迭代初期应用柯西变异函数对算法进行扰动,扩大粒子的搜索范围,增加粒子的多样性;而采用Gaussian函数能够实现较强的局部搜索能力,算法迭代后期易陷入局部最优,当适应度值多次未发生变化则判断为粒子陷入了局部最优;此时采用高斯变异函数对粒子进行小范围的扰动,使粒子跳出局部最优,提高算法的精确度。两者结合可提高粒子搜索能力及群体的多样性,通过不断地迭代寻优,使粒子得到更好的逼近精度。
2.2 自适应惯性权重
惯性权重是粒子群算法中最重要的改进参数,本文采用非线性递减的方法实现惯性权重的自适应调整,提高全局和局部搜索能力。其具体的实现公式为
(8)
其中,ωmax、ωmin分别为惯性权重的最大值和最小值;t为当前的迭代次数;T为最大迭代次数。
2.3 适应度函数
根据选择的测距方法RSSI进行测距,由于测量距离一定会存在误差,则定位问题转化为误差模型优化问题,即求解适应度最小值,且适应度值越小,得到的定位结果也越优。由此,该问题的适应度函数为
(9)
式中m—定位区域内的有效信标节点的个数;
di—测量距离;
(x,y) —未知节点的估计坐标;
(xi,yi)—信标节点的坐标。
3 试验与分析
2015年6月30日,在大豆试验田进行了未知传感器节点定位试验,选择100m×100m的试验场地,栽种的大豆植株平均高度33cm,植株栽种整齐。将终端监测节点在测量半径范围内均匀随机散布于场地中, 20个终端节点为信标节点,20节点为未知节点;测距半径为40m,参考距离d0为1m,经试验验证径损耗指数β取值为3.0;算法迭代次数设置为50次,粒子群规模为100,学习因子c1=c2=1.496 2,收敛精度设置为10-6。定位结果均为相同条件下进行50次试验得到结果的平均值。
本文试验器材为ZigBee传感器模块,主要采用CC2530核心芯片,应用CC2530芯片上的RSSI测距功能进行节点间距离测量。
大豆秧苗的生长情况部分试验器件如图1所示。

图1 大豆植株与试验器件
使用C++编写数据处理软件的显示界面如图2所示。
进行RSSI测距并将修正的数据进行上位机存储应用在改进粒子群算法的定位中,限定测距误差为10%。应用标准和改进的粒子群算法对未知的20个节点进行定位,以未知坐标点[43 54]为基准对象进行影响因素为信标节点个数的试验,其他节点方法相同。试验得到坐标数值如表1所示。在保证其他试验参数不变且信标节点个数为10的条件下进行传感器节点测距误差的试验得到坐标数值如表2所示。
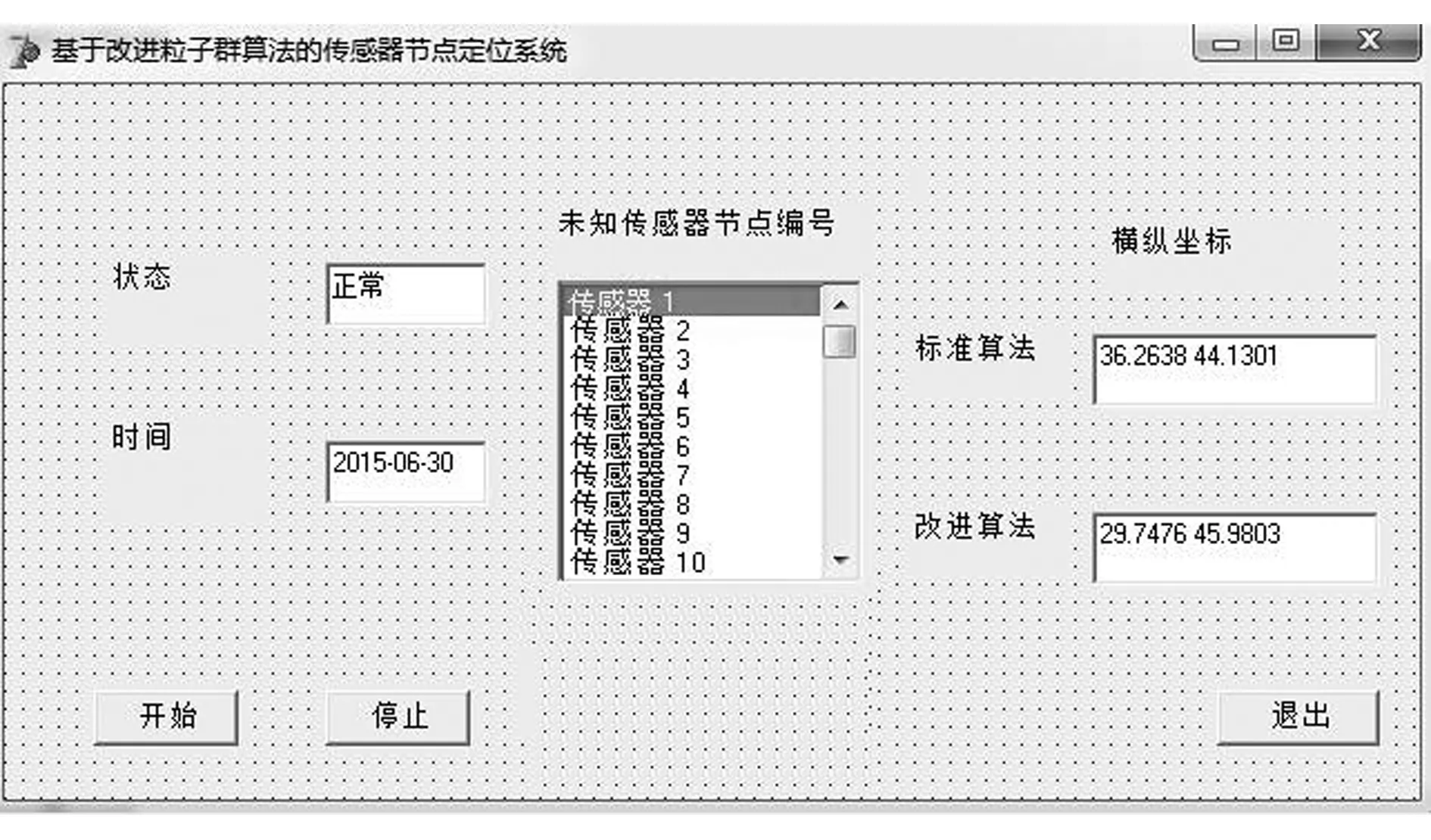
图2 数据显示界面

信标节点个数改进算法得到坐标粒子群算法得到坐标2[36.263844.1301][29.747645.9803]4[41.241755.3824][44.632850.5082]6[46.369655.6329][42.731251.6673]8[44.029159.3727][43.666251.7128]10[45.308854.7850][45.386454.0971]12[43.061955.9533][45.109057.8636]14[42.580956.3052][44.943453.4003]16[45.862753.7668][43.086955.9607]18[44.078651.5133][43.212253.4022]20[43.396754.7019][43.439853.2418]

表2 不同测距误差得到未知节点坐标
本文针对信标节点个数进行节点定位试验,定位得到的坐标进行误差数据分析如图3所示。
测距误差是影响定位精度和算法稳定度的重要因素。在其他条件不变的情况下,根据不同测距误差得到的试验结果,如图4所示。

图3 信标节点的数量对平均定位误差的影响

图4 不同测距误差对平均定位误差的影响
通过节点个数和测距误差两种因素的结果比较,验证了本文提出的改进算法的精确性较高,同时在较少的信标节点的情况下能得到更优的定位结果。
针对文中设定的20个未知节点进行定位误差的试验,在测距误差为5%,信标节点为14的情况下,试验结果显示如图5所示。两种算法的平均定位误差分别为1.746 1m和 1.170 8m。
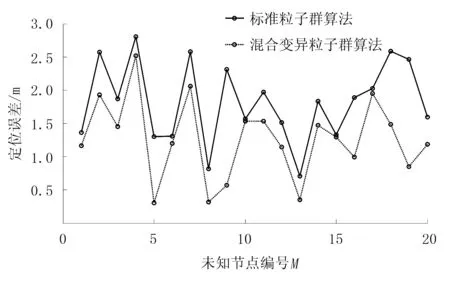
图5 节点定位误差比较
4 结论
1)在应用RSSI基本测距方法的基础上采用高斯数据筛选模型修正其测量距离,提高测距精度,为本文应用改进算法定位坐标减小误差影响。
2)定位算法在粒子搜索迭代过程中运用柯西变异函数和Gaussian变异函数混合策略对最优解进行变异搜索,克服了标准算法容易陷入局部最优和定位误差大的缺点,保证了全局遍历性。
3)针对影响定位效果的两个主要因素进行试验,结果表明:在相同定位误差的情况下,本文算法需要更少的信标节点。同时,在测距误差和信标节点取值相同的情况下,本文研究方法比标准粒子群算法的定位精度更高,体现了该方法的有效性。
[1] Burrrel J,Brooke T,Beckwith R.Vineyard computing :Sensor networks in agriculture production[J].Persvasive Computing,2004,3(1): 38-45.
[2] 曾迪,余瑶.无线传感器网络节点定位算法研究[J].数字通信,2014,41 (3):22-27.
[3] GOPAKUMAR A, JACOB L. Localization in wireless sensor networks using particle swarm optimization[C]//Proc IET International Conference on Wireless, Mobile and Multimedia Networks. Mumbai, India: IET Press, 2008:227-230.
[4] NAMIN P H, TINATI M A. Node localization using particle swarm optimization[C]//Proc 7th International Conference on Intelligent Sensors, Sensor Networks and Information Processing. Adelaide, SA, South Australia:IEEE, 2011: 288-293.
[5] CHUANG P J, WU C P. Employing PSO to enhance RSS range-based node localization for wireless sensor networks[J].Journal of Information Science and Engineering, 2011, 27(5): 1597-1611.
[6] 王俊,李树强,刘刚.基于相似度的温室无线传感器网络定位算法[J].农业工程学报,2013,29(22):154-161.
[7] 章坚武,张璐,应瑛,等.基于ZigBee的RSSI测距研究[J].传感技术学报,2009,22(2):285-288.
[8] 周海洋,余剑.无线传感器网络中基于RSSI的测距研究[J].电子测量技术,2014,37(1):89-91.
[9] 张亚明,史浩山,陈克松,等.一种改进的无线传感器网络优化定位算法[J].电子科技大学学报,2015,44(3):357-362.
[10] 周利军,彭卫,曾小强,等.基于杂交变异的动态粒子群优化算法[J].计算机科学,2013,40(11A):143-146.
[11] 王俊,李树强,刘刚.无线传感器网络三维定位交叉粒子群算法[J].农业机械学报,2014,45(5):233-238.
[12] 侯微,董红斌,印桂生.一种改进的基于分解的多目标进化算法[J].计算机科学,2014,41(2):114-118.
[13] 王立舒,侯涛,姜淼.基于改进多目标进化算法的温室环境优化控制[J].农业工程学报,2014,30(5):131-137.
[14] 冯秀芳,吕淑芳.基于RSSI和分步粒子群算法的无线传感器网络定位算法[J].控制与决策,2014,29(11):1966-1972.
[15] 马超,邓超,熊尧,等.一种基于混合遗传和粒子群的智能优化算法[J].计算机研究与发展,2013,50(11):2278-2286.
Precision Agriculture Wireless Ssensor Network Terminal Node Localization
Wang Lishu, Zhang Liying, Zhang Zhiwen, Yang Peng, Wang Shuwen
(College of Electrical and Information, Northeast Agricultural University,Harbin 150030,China)
For existing precision agriculture sensor network node localization algorithm is easy to fall into local optimum positioning accuracy and low,this paper presents an improved wireless sensor network node localization algorithm to target ZigBee wireless network nodes soybean fields, gaussian filter model updating data received signal strength measurements, Introduced in the standard particle swarm algorithm based on the mixed mutation strategy, using the advantages of a mixed strategy of each variogram role in population in the algorithm search process, the particles trapped in local minima, to ensure global search ability to traverse.By experimental field trials soybean farm, the average positioning error standard particle swarm algorithm and proposed positioning mutation particle swarm hybrid positioning algorithms were positioning accuracy 1.7461m and 1.1708m, it indicates that more accurate methods of improvement.
sensor network; RSSI ranging; hybrid mutation PSO algorithm; position; precision agriculture
2015-12-08
黑龙江省自然科学基金面上项目(C2015006);教育部“春晖计划”基金项目(Z2012074);黑龙江省教育厅科技项目(12521038)
王立舒(1973-),男,哈尔滨人,教授,博士,博士生导师,(E-mail)wanglishu@neau.edu.cn。
S24
A
1003-188X(2017)01-0043-04
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
中国惯性技术学报(2020年6期)2020-04-06
科学(2020年3期)2020-01-06
铁道通信信号(2018年3期)2018-04-19
浙江工业大学学报(2017年5期)2018-01-22
电子制作(2017年7期)2017-06-05
发明与创新(2016年17期)2016-12-22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
