
移栽机自动化送盘装置的关键部件及送盘方法的设计分析
2017-12-15 06:46李俊虹
农机化研究 2017年1期
马 振,胡 斌,李俊虹
(石河子大学 机械电气工程学院,新疆 石河子 832000)
移栽机自动化送盘装置的关键部件及送盘方法的设计分析
马 振,胡 斌,李俊虹
(石河子大学 机械电气工程学院,新疆 石河子 832000)
鉴于我国新疆地区大面积的种植模式,人工移栽穴盘苗劳动强度大、成本高、移栽周期长及移栽效率低等问题,设计了一种穴盘苗移栽机自动化送盘装置,并对关键部件和送盘方法进行设计分析。该装置由机架装置和传送带装置组成,伺服电机驱动传动链转动,穴盘层被带动向下移动,通过止动摇杆机构的配合工作,使穴盘自动下滑到传送带上;通过穴盘的自重和传送带的共同作用使穴盘到取苗输送装置入口处,实现穴盘自动化送入取苗输送装置。该装置结构简单、成本低,对增加农民的经济收入,解决育苗移栽技术大面积推广具有重要意义。
自动化;送盘装置;送盘方法;移栽机
0 引言
新疆地处我国西北地区,目前是全国最大的番茄、甜菜、红花及棉花等经济作物生产基地,但由于无霜期短、温度变化率大,不宜于早播。团场大部分番茄酱厂规模较小,吞吐量有限,收获期大量番茄积压,造成番茄腐烂,给农民造成很大的经济损失。因此,需要使番茄成熟期错开,采用育苗移栽的方法可有效地避开气候因子对经济作物的影响,缩短作物的生长发育期,提早作物成熟期,并且能够有效地提高经济作物的产量,增加团场农民的收入。
育苗移栽技术作为一种培植技术,有着直播不可比拟的优势,可以提前作物的生育期,能有效地避开作物受早春低温、倒春寒等气候的影响,提高幼苗的成活率,具有显著的节本、增产、增收效果[1-2]。
作物移栽主要包括两种方式:人工移栽和机械化移栽。人工移栽需要大量劳动力并且劳动强度大、效率低,很难实现大面积、大规模移栽,不利于钵苗移栽技术的推广应用。新疆是全国最大的农业主产区,其番茄、甜菜等经济作物的种植面积、产量近几年均居我国前列,对新疆经济的发展起了主导性作用。新疆在移栽机械化方面起步比较晚,主要是以引进国外的移栽机并进行仿制,但效率较低、精度不高。
国内对于移栽机送盘方面研究较少,辣椒、番茄移栽大多是由人工将穴盘送入取苗输送装置,未能实现全程机械化。针对这种情况,设计了一种自动化送盘装置。
1 结构及工作原理
1.1 工作原理
根据移栽机自动化送盘装置的工作原理和性能要求,其结构由机架、穴盘层装置、传动链装置、止动摇杆装置、止动长形铁片及传送带装置组成。机架中部均匀布置若干个穴盘层,穴盘层上方放有穴盘,下方与支撑长杆机构连接;支撑长杆机构和传动链连接,通过传动链带动穴盘层运动,传动链上的链轮通过机架上的轴承座固定;传送带装置放置于穴盘层前方,传送带倾斜并与穴盘层的倾斜角度相通。当伺服电机驱动传动链转动时,穴盘层向下移动到工作位置,止动摇杆机构工作,使穴盘自动下滑到传送带上,通过穴盘的自重和传送带的共同作用使穴盘到取苗输送装置入口处,实现穴盘自动化送入取苗输送装置。
1.2 结构布局
移栽机自动化送盘装置的总体结构布局如图1所示。该装置主要由机架、穴盘层装置、传动链装置、止动摇杆装置、止动长形铁片及传送带装置组成。
2 送盘装置的关键部件设计分析
2.1 穴盘层装置的设计分析
根据机械设计的最优原则,该装置的穴盘层装置放置于机架的中部,机架和穴盘层装置的空间布局如图1所示。机架上固定的穴盘层装置由穴盘层和支撑长杆机构组成,穴盘层沿着纵向均匀分布,根据作业速度和频率设定相邻穴盘层之间距离。为了能够让穴盘依靠自重下滑,穴盘层与水平面倾斜一角度α,使穴盘克服摩擦力自动下滑,其关系式为
mgsinα≥mgkcosα
(1)
式中m—穴盘的质量;
g—重力系数;
α— 穴盘层表面与水平面的夹角;
k—穴盘层上表面与穴盘之间的摩擦因数。

1.机架 2.限位横梁 3.进口检测区域 4.重力传感器 5.传送带 6.挡板 7.滑道 8.传送带 9.传送带轴承座 10.传送带支撑架 11.止动片 12.摇杆 13.销 14.基座 15.位置传感器 16.角接片 17.连接片 18.链节 19.轴承座 20.焊接片 21.隔板 22.支撑长杆机构 23.链轮 24.传动链 25.穴盘层 26.穴盘 27.止动长形铁片 28.电磁铁
穴盘层的结构示意图如图2所示。

图2 穴盘层结构示意图
穴盘层被中间隔板分为3块区域,每块区域可放置1~3个穴盘,穴盘为长5 200mm、宽2 700mm、高450mm。根据穴盘的尺寸,相邻两隔板的距离b应设置为
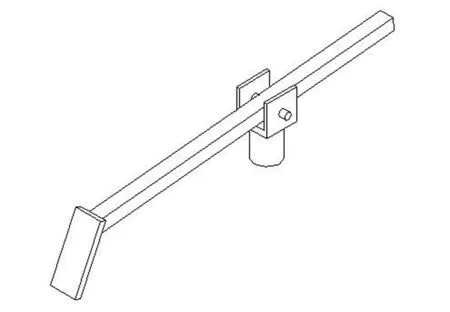
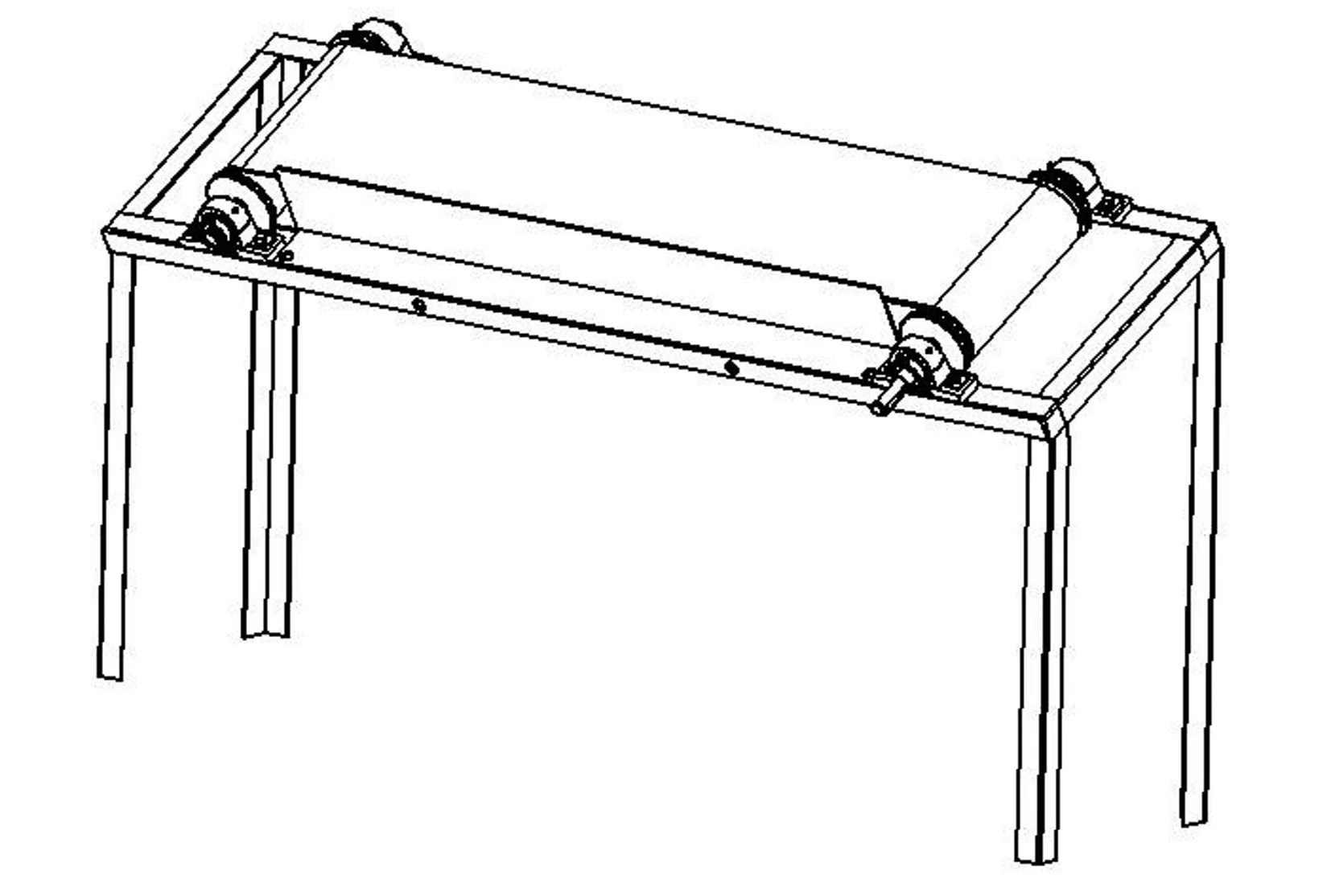
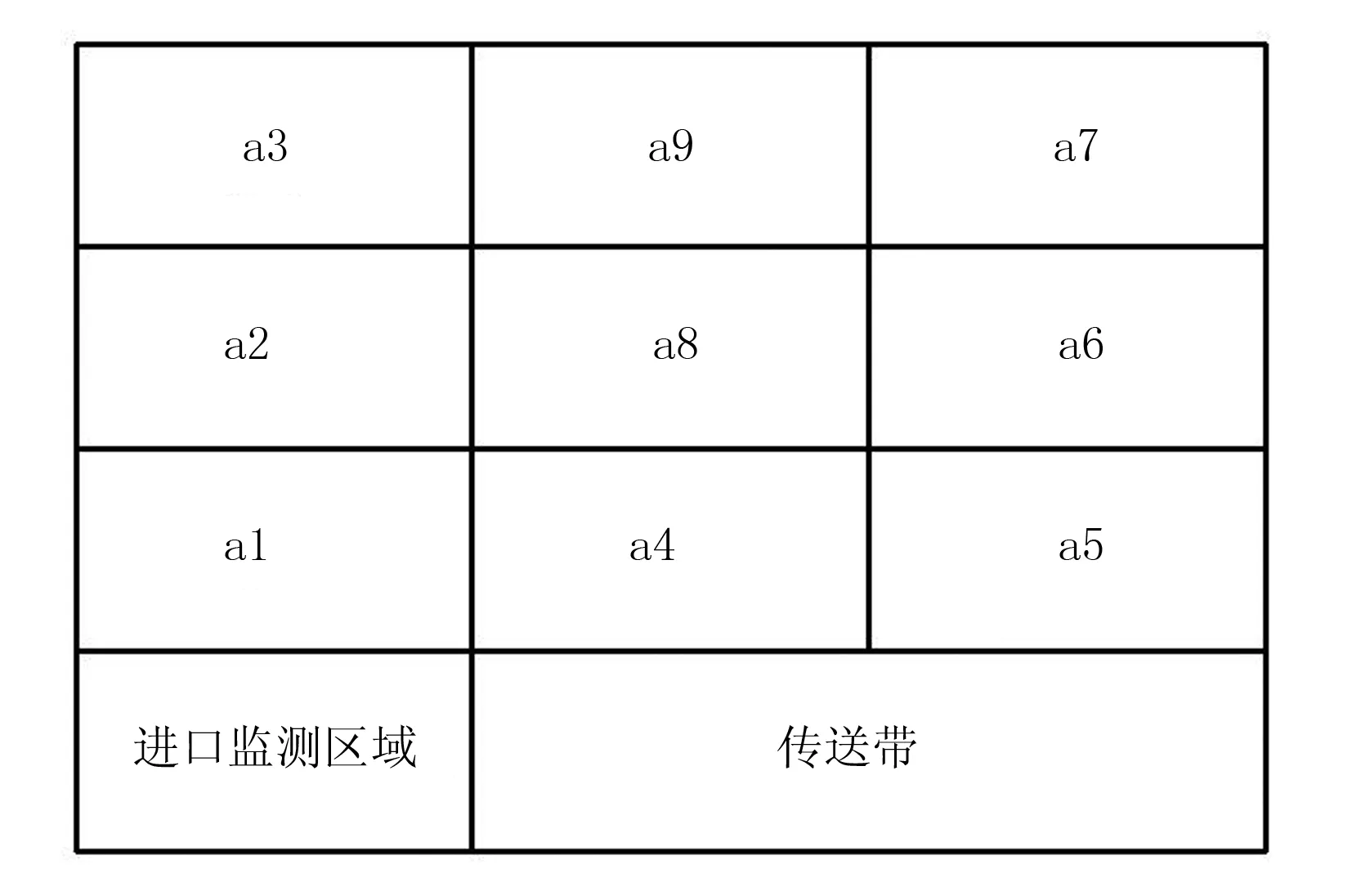
5200 (2) 穴盘层开口处与机架上的止动长形铁片相贴,止动长形铁片纵向设置3个,宽度为500mm。支撑长杆机构位于穴盘层的正下方,通过焊接在穴盘层上的焊接片与穴盘层连接,支撑长杆机构布置2个,其间距为500mm。支撑长杆机构的结构示意图如图3所示。 图3 支撑长杆机构结构示意图 2.2 传动链装置的设计分析 传动链装置由传动链、链轮及传动链轮轴承座组成,传动链装置布置在机架的两侧,通过传动链轮轴承座固定于机架上。传动链有2组,对称分布,且由若干个链节组成,链节首尾相连接,形成环形传动链;链节上设有连接片,连接片与支撑长杆机构上的角接片通过螺栓连接。 2.3 止动摇杆机构的设计分析 止动摇杆机构如图4所示。止动摇杆机构由止动片、摇杆、基座及销组成,止动片与摇杆相连接,摇杆与基座通过销连接,基座固定于止动长形铁片上。电磁铁位于摇杆远离止动片一端的下方,固定于止动长形铁片上。通过点电磁铁处开关的闭合控制止动摇杆机构的工作。 图4 止动摇杆机构示意图 2.4 传动带装置的设计分析 传送带装置示意图,如图5所示。传送带装置放置于机架的正前方,由传送带支撑架、传送带、挡板、传动轴及滑道组成,挡板在传送带的远离机架的一侧,传动轴位于远离进口检测区域的一端。为了使穴盘能够平滑滑到传送带上,传送带所在平面应与穴盘层的倾斜角度相同,滑道位于传送带和机架中间,和传送带平滑连接。 图5 传送带装置示意图 为了实现自动化送盘的功能,设计一种自动化送盘方法,实现有序的送盘。自动化送盘方法如下: 1)穴盘层工作位置的确定。伺服电机正转,通过传动链带动穴盘层向下运动,当最底下的第1个穴盘层的隔板上边缘和限位横梁的下边缘重合时,停止穴盘层运动。调整机架上的位置传感器的位置,使其能检测到穴盘层上的感应片,此时第1个穴盘层所处的位置就是工作位置。 2)穴盘层起始位置的确定。伺服电机反转,带动穴盘层向上运动,当最底下的穴盘层位于限位横梁上方某一距离时,穴盘层停止运动,此时最底下的穴盘层所处的位置就是穴盘层的起始位置。 3)工作阶段。首先3个穴盘层停置于起始位置,PLC控制器控制伺服电机带动链轮转动,传动链带动支撑长杆机构向下运动,与支撑长杆机构相连接的穴盘层向下运动。当第1个穴盘层到达限位横梁处时,位置传感器感应信号,伺服电机停止转动,第1个穴盘层停在工作区域。当伺服电机停止转动,第1个穴盘层停在工作区域时,电磁铁处开关闭合,电磁铁工作,摇杆被电磁铁吸附,与摇杆相连接的止动片向上移动,穴盘通过自重沿斜面的分力自动下滑,经过滑道进入进口检测区域和传送带上,传送带上的挡板使穴盘停止沿斜面向下滑动。 穴盘编号示意图如图6所示。重力传感器工作,检测到穴盘,穴盘按照编号a1、a2、a3纵向依次进入取苗输送装置进行取苗。当编号a3的穴盘进入取苗输送装置后,重力传感器第1次检测到无盘信号,电机转动,驱动传动轴转动并保持一定速率,带动传送带转动;编号a4、a5的穴盘向进口检测区域运动,当编号a4、a5向前移动一格穴盘长的距离后,编号a6穴盘自动滑落至传送带上。 图6 穴盘编号示意图 传送带保持转动,穴盘按照编号a4、a5、a6的顺序横向依次进入取苗输送装置;当在传送带上的编号a6的穴盘向前移动一格穴盘长距离后,编号a7的穴盘自动下滑至传送带上。 根据上述的运动规律,紧接着穴盘按照编号a7、a8、a9的顺序依次进入取苗输送装置;当编号a9的穴盘进入取苗输送装置后,重力传感器第2次检测到无盘信号,信号反馈,电磁铁处开关断开,摇杆回位,止动片回位至限位横梁。 止动片回位后,伺服电机第2次转动,带动穴盘层向下移动,第2个穴盘层进入工作区域。第2个穴盘层的工作过程和第1个相同,第2个穴盘层上的穴盘按照上述运动规律全部进入取苗输送装置后,第3个穴盘层重复上述工作过程。当第三个穴盘层上的穴盘全部进去取苗输送装置后,重力传感器检测到无盘信号,传送带连接的电机停止转动,连接链轮的伺服电机反转,穴盘层回到初始位置,自动送盘工作结束。 1)介绍了移栽机自动化送盘装置的工作原理及送盘方法,对关键部件和送盘方法进行了设计与分析。该装置结构简单,加工制造容易,稳定性好,成本低。 2)本次设计的移栽机自动化送盘装置,通过多种装置的组合,实现了自动化送盘功能,可以有效提高移栽效率,对育苗移栽技术大面积推广具有重要意义。 3)本次设计的移栽机自动化送盘方法,具有创新性,通过利用穴盘自重的特点提供运动的动力,具有节能的优势。 [1] 于晓旭,赵匀,陈宝成,等.移栽机发展现状与展望[J].农业机械学报,2014,45(8):44-53. [2] 张振国,曹卫彬,王侨,等.穴盘苗自动移栽机研究现状与发展前景[J].农机化研究,2013,35(5):237-241. [3] 张振国,曹卫彬,王鹏,等.番茄穴盘苗自动移栽机顶杆式取苗装置的设计[J].农机化研究,2013,35(4):72-75. [4] 赵晓伟,韩长杰,赵占军,等.新疆地区辣椒、番茄移栽机发展现状及趋势[J].农业科技与装备,2015(5):41-43. [5] 杜立恒,俞高红,张国风,等.高速插秧机钵体毯状苗纵向送秧装置的设计与试验[J].农业工程学报,2014,30(14):17-25. [6] 杨传华,方宪法,杨学军,等.基于PLC的蔬菜钵苗移栽机自动输送装置[J].农业工程学报,2013,44(S1):19-23. [7] 裘利钢,俞高红.蔬菜钵苗自动移栽机送苗装置的设计与试验[J].浙江理工大学学报,2012,29(5):683-687. [8] 韩长杰.穴盘苗移栽机自动取喂系统的设计与试验[J].农业工程学报,2013,29(8):51-60. [9] 田昆鹏,毛罕平,胡建平,等.自动移栽机门形取苗装置设计与试验研究[J].农机化研究,2014,32(2):168-172. [10] 严宵月,胡建平,吴福华,等.整排取苗间隔放苗移栽机设计与试验[J].农业机械学报,2013,44(S1):7-13. [11] 韩长杰,郭辉,张学军,等.硬质穴盘苗自动取苗装置设计[J].农业工程,2013(4):99-102. [12] 刘效亮,李其昀.育苗移栽机械化发展方向[J].山东理工大学学报,2003,17(3):108-110. [13] 徐丽明,张铁中,史志清.玉米自动移栽机取苗机构的设计[J]. 中国农业大学学报,2000(4):58-60. [14] 武科,陈永成,毕新胜.集中典型的移栽机[J].新疆农机化,2009(3):12-14. [15] 建能,王伯鸿,任根勇,等.蔬菜移栽机放苗机构运动学模型建立与参数分析[J].农业机械学报,2010,41(12):48-53. [16] 陈达,周丽萍,杨学军,等. 移栽机自动分钵式栽植器机构分析与运动仿真[J].农业机械学报,2011,42(8):54-57,69. [17] 马瑞峻,区颖刚,赵祚喜,等. 水稻钵苗机械手取秧有序移栽机的改进[J].农业工程学报,2003,19(1):113-116. [18] 俞高红,陈志威,赵匀,等. 椭圆-不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J].机械工程学报,2012,48(13):32-39. Design and Analysis of Key Components of the Automatic Feeding Device for Seedling Transplanting Machine Ma Zhen, Hu Bin, Li Junhong (Machinery and Electricity Engineering College, Shihezi University, Shihezi 832000,China) In view of large area planting pattern in the area of Xinjiang, artificial transplanting plug seedling has the problem of large labor intensity, high cost, long transplanting period and low efficiency of transplanting. We have designed a new type of automatic feeding device of plug seedling transplanting machine and analyzed the key parts and the method of the machine. The device is composed of a frame device and a conveyer belt device. The servo motor drives the drive chain, and the plug device is driven to move downwards. Through the joint operation of the stop and rocker mechanism, the plug is automatically dropped to the conveyor belt.The device is simple in structure and low in cost, which is of great significance for increasing the economic income of farmers and promoting the popularization of seedling transplanting technology.At the same time, it is beneficial to promote agricultural mechanization. automatic ; feeding device; feeding method ;transplanting machine 2015-12-15 国家自然科学基金项目(51365047) 马 振(1993-),男,安徽马鞍山人,硕士研究生,(E-mail)18255183270@163.com。 胡 斌(1968-),男,湖北英山人,教授,硕士生导师,(E-mail)hb_mac@shzu.edu.cn。 S223.94 A 1003-188X(2017)01-0068-04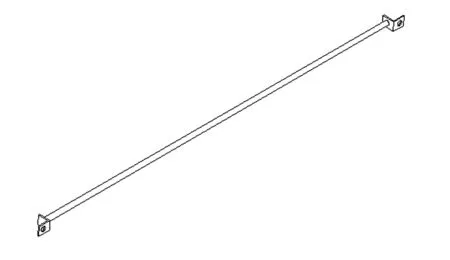
3 送盘方法的设计分析
4 结论
猜你喜欢
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
四川蚕业(2020年3期)2020-07-16
郑州轻工业学院学报(社会科学版)(2019年1期)2019-04-12
农业工程学报(2018年21期)2018-11-05
农机化研究(2018年6期)2018-06-06
现代园艺(2018年15期)2018-01-18
科学家(2017年1期)2017-04-11
中南大学学报(自然科学版)(2016年2期)2017-01-19
制导与引信(2016年3期)2016-03-20
