
数字化变电站采样值报文非整周期采样误差分析及其补偿算法研究
2017-12-20 07:15段太钢吴双惠金华蓉卜银娜寇华垒
电测与仪表 2017年4期
段太钢,吴双惠,金华蓉,卜银娜,寇华垒
(许继电气股份有限公司,河南 许昌 461000)
0 引 言
数字化变电站是近年来高速发展的新兴技术,是未来电网技术的发展趋势。采样值报文在数字化变电站中占据非常重要的地位。过程层电子互感器采集电流电压信号后,通过光纤将采样值报文传输给间隔层及站控层设备。目前,国际电工委员会(IEC)已经制定了电子式电压互感器标准 GB/T 20840.7-2007[1]和电子式电流互感器标准 GB/T 20840.8-2007[2],对基于光纤串口的采样值报文传输进行了规范。SAC/TC 57制定了 DL/T 860.91[3]和DL/T 860.92[4]标准,对基于光纤网口的采样值报文传输进行了规范。这些标准有利于实现变电站综合自动化系统的标准化和互操作性。
限于智能设备的处理能力和网络设备的吞吐能力,IEC 61850规定的采样值报文采样率较低。有每周波40点、80点、160点、256点等速率,一般采用每周波80点。相对于传统电量信号每周波1 000点以上的采样率非常低。显然,在低采样率的情况下,非整周期采样问题更为明显,直接导致傅里叶变换的频谱泄露现象和栅栏效应更为严重[5]。这都将严重影响频域分析的准确度,特别是对相位精度的影响很大。
现有方法大多是通过加窗插值傅里叶变换减小这种误差[6-10],只考虑了频率偏差对结果的影响。实际上,从不同的相位开始截取数据分析,对结果的影响也是不一样的。文献[11]从有效值和功率的角度考虑了初始相位的影响,但是在某些应用场合,需要用傅里叶分析各次谐波含量,有效值和基波含量仍有一定区别。本文从频率和相位两个角度,全面分析傅里叶变换非整周期采样误差,找出误差最小条件,并给出相应补偿算法,提高分析精度。
1 非整周期采样误差分析
实际现场工作条件下,电网频率必定在一定范围内波动,非整周期采样不可避免。以每周波80点为例,IEC 61850采样值报文采样间隔固定为250 μs,不会跟随电网频率变换。因而,在电网频率出现波动的时候,必然出现非整周期采样现象。电网频率可以通过各种频率跟踪算法得到,不在本文讨论范围内,以下分析假设实际电网频率已知。
假设实际电网频率为f,傅里叶分析理论基波频率为F,记λ=f/F;基波采样点数为N,幅值为Am,初始相位为θ的采样信号时域表达式为:
采用离散傅里叶变化(DFT)对采样信号进行频域分析,其DFT的基波分析结果为:
将θ1和θ2记作公式(3)中内容:

简化公式(2)为:


根据向量误差定义,非整周期采样相对于整周期采样的误差E为:

相量E的幅值即为幅值比差,相量E的相位即为相位误差。根据公式(4)~公式(6)得到误差E表达式为:
由此可见,非整周期采样误差跟基波采样点数N,频率偏差λ,截取波形初始相位θ有关。而采样点数和频率偏差往往由现场条件决定,后端分析唯一能减少误差的方法是,选取合适的初始相位θ截取数据进行分析。
2 幅值和相位最小误差条件及补偿
在非整周期采样误差分析的基础上,分别从幅值误差和相位误差两个方面寻找最合适的初始相位。
2.1 幅值误差最小条件及补偿
假设,a和b分别定为式(8)中的量:

得到公式(6)向量的模:

当‖E‖=1时,幅值误差为0。从式(9)解得幅 值误差最小条件为:

式中k为整数。
因此,当初始相位θ按照式(10)取值时,没有幅值误差。但是在实际应用中,往往不能完全准确取到任意初始相位,应尽量接近最小误差条件取值,然后用式(9)进行补偿。
2.2 相位误差最小条件及补偿
相位误差即为式(6)的向量角度。相位误差角度记为δ,则得到δ:

将a,b,α,β分别定义为:
则式(11)简化为式(13):

寻找最小相位误差条件转化为求函数的极值点,记为f(β):

式中a,b,α均为已知量,可以通过式(12)求得,β为关于θ的变量。函数f(β)的极值点,必然其一阶导数为0,得到:
化简式(15),得到:

取f′(β)=0,可以得到:

将式(12)带入式(17),得到:
从而得到最小相位误差条件:
式中k为整数。
在实际应用中,可根据式(19)选取合适的初始相位θ,使相位误差最小。但此时相位误差并不为0,应再根据式(11)进行补偿。
3 软件设计
3.1 最优起始相位角
根据GB/T 15945-1995规定,电网频率允许在[49.8,50.2]Hz范围内波动。本文考虑到故障发生情况下,电网频率波动范围会超过国标规定。因此在实际频率为[49,51]Hz的宽范围内进行仿真,以增强算法的适应能力。
为了验证本文理论分析的正确性。使用基本DFT变换扫描在不同采样点数、不同电网实际频率、不同起始相位角的基波分量幅值误差和相位误差。同时,使用本文算法直接计算在各种情况下的幅值误差和相位误差。两种方法算出的误差完全相同。因此,在表1~表4中,均只提供一种算法的仿真结果。
频率在[49,50]Hz的范围内变化,幅值误差最小时的最优起始相位角如表1所示。
频率在[50,51]Hz的范围内变化,幅值误差最小时的最优起始相位角如表2所示。
表1~表2为从幅值误差角度考虑,在不同采样点数和实际频率情况下的最优起始相位角。从表中数据得出:在实际频率和理论频率均为50 Hz时,从任意起始相位角开始采样,均没有相位误差。幅值误差最小时,最优起始相位角大致在45°附近。随着实际频率的增加,最优起始相位角略微变小;随着采样点数的增加,最优起始相位角也略微变小。本文给出的为IEC 61850规定的采样值报文主要采样点数下的仿真数据。其他采样点数情况下,分析方法完全相同。

表1 频率49.0 Hz~50.0 Hz,幅值误差最小时的最优起始相位角Tab.1 Frequency 49.0 Hz~50.0 Hz,the optimal starting phase angle when amplitude error is minimum
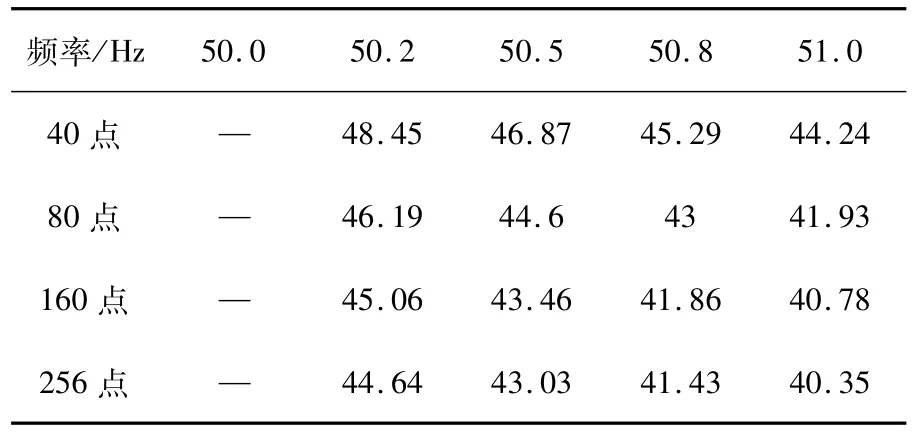
表2 频率50.0 Hz~51.1 Hz,幅值误差最小时的最优起始相位角Tab.2 Frequency 50.0 Hz~51.0 Hz,the optimal starting phase angle when amplitude error is minimum
频率在[49,50]Hz的范围内变化,相位误差最小时的最优起始相位角如表3所示。

表3 频率49.0 Hz~50.0 Hz,相位误差最小时的最优起始相位角Tab.3 Frequency 49.0 Hz~50.0 Hz,the optimal starting phase angle when phase error is minimum
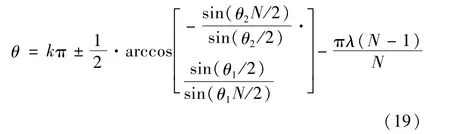
频率在[50,51]Hz的范围内变化,相位误差最小时的最优起始相位角如表4所示。
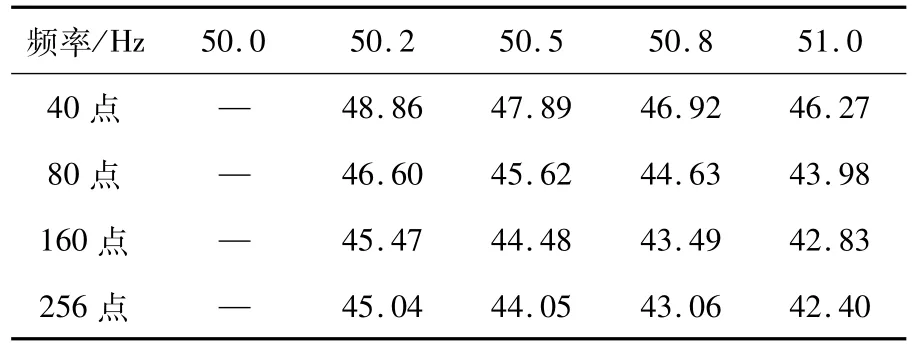
表4 频率 50.0 Hz~51.1 Hz,相位误差最小时的最优起始相位角Tab.4 Frequency 50.0 Hz~51.0 Hz,the optimal starting phase angle when phase error is minimum
表3~表4为从相位误差角度考虑,在不同采样点数和实际频率情况下的最优起始相位角。从表1~表4中的数据综合分析,在实际频率和理论频率均为50 Hz时,从任意起始相位角开始采样,均没有相位误差。幅值误差最优起始相位角和相位误差最优起始相位角变化规律相同。然而,从两个角度考虑的最优起始相位角仍不完全相等。可根据需要,选择倾向于其中一个的最优值,或在两者之间加权综合考虑。
3.2 误差曲线
本文以智能变电站最常用的每周期80点为例,仿真在各种情况下的幅值误差和相位误差。在其他点数下,变化规律完全相同,仿真得到幅值误差绝对值变化曲线如图1所示。
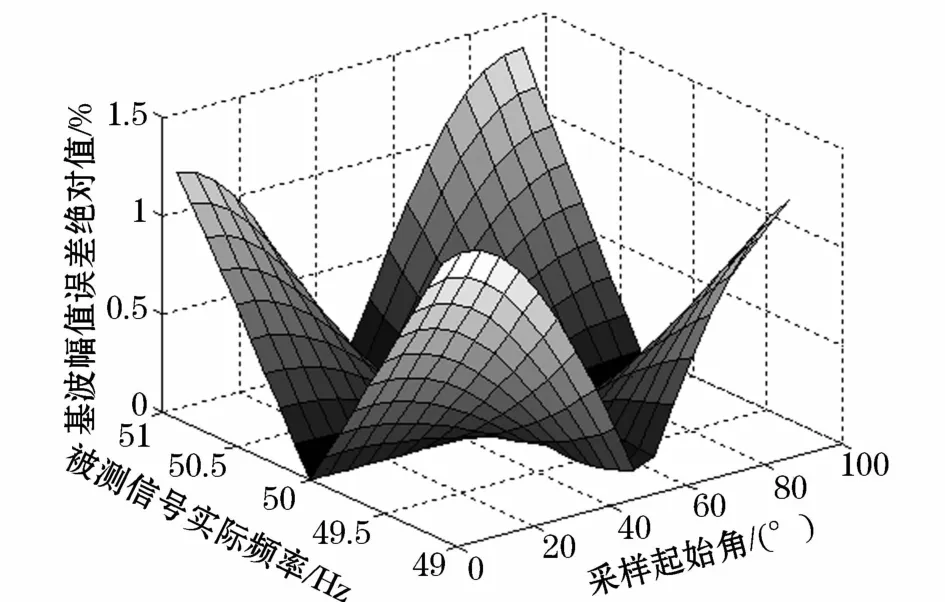
图1 幅值误差绝对值变化曲线Fig.1 Absolute value curves of amplitude errors
从图1看出,在本文规定的实际电网频率范围内,按照式(10)找到的最优起始相位角,能够使幅值误差完全为0。仿真得到相位误差绝对值变化曲线如图2所示。
从图2可以看出,在实际频率和理论频率不相等的情况下,按照式(19)找到的最优起始相位角不能完全消除相位误差。只能使相位误差相对最小,仍需要根据式(11)进行补偿。

图2 相位误差绝对值变化曲线Fig.2 Absolute value curves of phase errors
4 结束语
在精度要求不高而实时性要求高的应用场合,可大致在45°起始相位附近截取数据进行计算,再根据本文算法补偿,误差相对较小。
在精度要求高的场合,根据本文公式准确选取最优起始相位角,再进行相应补偿。理论上可以完全消除误差。
在现场工作条件下,考虑到高次谐波分量的干扰,本文算法不能完全消除误差,但仍能显著减少误差。
猜你喜欢
河南医学研究(2020年27期)2020-10-18
物理学报(2018年22期)2018-12-18
测控技术(2018年9期)2018-11-25
数学小灵通·3-4年级(2017年12期)2018-01-23
北京航空航天大学学报(2017年10期)2017-04-20
小学生导刊(低年级)(2016年11期)2016-11-14
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年14期)2016-04-11
