
基于非线性积分滑模变结构控制三相VSR的研究*
2017-12-20 07:15樊英杰张开如狄东照李丽明王毅
电测与仪表 2017年4期
樊英杰,张开如,狄东照,李丽明,王毅
(1.山东科技大学 电气与自动化工程学院,山东 青岛 266590;2.国网山东潍坊寒亭供电公司,山东 潍坊 266110)
0 引 言
三相电压型PWM整流器(VSR)功率因数可控,能实现双向能量传递因而得到广泛的应用[1-2]。常用的控制策略仍然是传统双闭环PI控制方法,但双闭环PI控制器的设计依赖于系统精确的数学模型,而三相VSR本身是非线性时变的系统,当受到外界干扰或自身参数发生变化时,系统的鲁棒性变差[3-4]。目前智能控制如神经网络控制、模糊控制被广泛应用在三相VSR中。但神经网络收敛速度较慢、编程复杂,对微处理器要求较高,增加系统成本。模糊控制根据经验来制定模糊规则,且模糊规则之间相互制约使得输出效果不佳[5]。滑模控制是一种非线性控制,根据系统当前状态不断切换迫使系统按照预定的轨迹滑动,滑动状态对参数变化及扰动无关,保持高度鲁棒性且结构简单易于实现[6]。但由于电力电子开关器件惯性及时间滞后等因素造成系统状态在滑模面两侧来回穿越造成抖振,抖振会增大电力电子器件的损耗,影响控制系统的精确性,对系统控制器造成损害[7]。对于离散系统而言,抖振是不可能消除的,因此必须在一定程度上削弱抖振的范围。传统滑模包括误差及误差的微分项,而对误差求微分这一过程对引入高频噪声,加剧了抖振效应,影响滑模面上的运动品质[8]。因此线性滑模在复杂非线性系统中的应用控制能力略显不足。传统积分滑模只有误差及误差的积分项,避免了对误差微分的求取,积分项可以消除系统的稳态误差、提高系统的抗干扰能力。但是在初始误差较大的情况下,由于积分的作用会产生饱和效应(windup),引起超调过大响应时间过长的问题,因此在此基础上对积分项进行削弱,抑制积分项带来饱和问题[9]。在趋近律的选择上采用指数趋近律,减小抖振。本文采用非线性积分滑模变结构控制,减小系统的稳态误差、提高了系统的鲁棒性。最后通过仿真可以证明相对于传统滑模控制和双闭环PI控制具有更小的超调量和跟踪能力。
1 三相VSR的拓扑结构
图1为三相VSR的一般拓扑结构。VT1-VT6为IGBT,VD1-VD6为反并联的二极管。ea、eb、ec为电网电动势,ua、ub、uc为三相桥臂输入端相对电网中性点电压,ia,ib,ic为三相输入电流,L为输入滤波电感,Rs为系统等效内阻。电阻RL为直流侧负载,iL为负载电流,C为滤波电容,Vdc为直流侧电压。根据基尔霍夫电压定律得到三相VSR在静止坐标系下的状态方程为:

式中Si(i=a,b,c)表示三相 VSR每一桥臂的开关状态。Si=1表示上桥臂导通下桥臂关断,Si=0则表示相反。两相静止坐标系(Clark)变换和两相静止坐标系到两相旋转坐标系(Park)变换可以得到在d-q坐标系下的状态方程为:
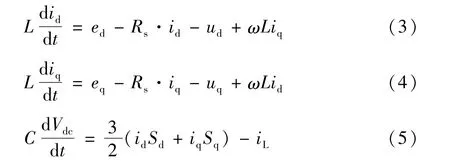
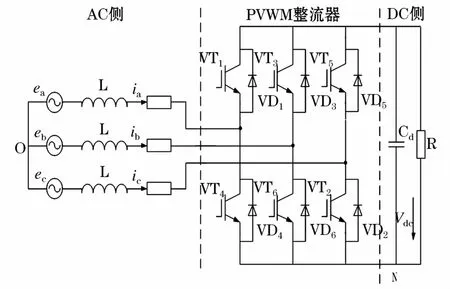
图1 三相电压型PWM整流器Fig.1 Three-phase voltage-source PWM converter
2 非线性积分滑模控制器的设计
如图2所示,滑模控制包括滑动阶段和到达阶段。系统状态变量从初始状态任意一点A到达点B,此时状态变量沿着滑模面S=0再从点B滑动到达原点O。这两种运动方式存在且可达,则系统开关函数需满足广义滑模条件:

满足上式李雅普诺夫不等式则取决于系统控制率的选择。

图2 滑模控制运动轨迹Fig.2 Moving track of sliding mode control
2.1 开关函数的设计

式中k1大于0。函数E(t)用来削弱积分项,其中E(0)等于系统的初始状态,即使系统在初始时刻就在滑模面上,具有全局鲁棒性。同时函数E(t)具有指数性质E(t)=E(0)e-t,当t趋近于无穷时E(t)=0。对式(7)求导得:

将ev的表达式代入式(8)可得:


将式(5)代入式(10)可得:


再对式(5)变形可得:两边同乘以Vdc可得:

式左边即为三相VSR的输出功率。若忽略三相VSR自身等效电阻等因素则有:

联立式(11)~式(14)可得:

当系统运行到稳定状态时 did/dt=diq/dt=0,则由式(3)、式(4)可知:

同时d轴电压与电网电压同向,因此eq=0,将式(16)、式(17)代入式(15),并忽略系统自身等效内阻Rs,化简可得:

对方程(18)两边同时除以ed/CVdc,则简化成如下表达式:


图3 非线性积分滑模控制结构图Fig.3 Structure diagram of nonlinear integrator sliding mode variable control
2.2 广义滑模条件的满足及控制率的选择
构造的滑模面满为了满足李雅普诺夫不等式(6),当Sv>0时,则要求 dSv/dt<0,因此应增大id,由式(3)可知应减小ud。同理当Sv>0时,应增大ud。
如图4所示,考虑到id、iq的解耦,选择简单的比例积分控制PI1、PI2即可满足要求,控制律为:

式中Pi(i=1,2)表示控制器的比例系数,Ki(i=1,2)表示积分系数。所得到的ud、uq直接利用电压空间矢量SVPWM调制方法产生脉冲控制IGBT即可。
2.3 指数趋近律
控制量的求取上这里选择指数趋近律,即令:

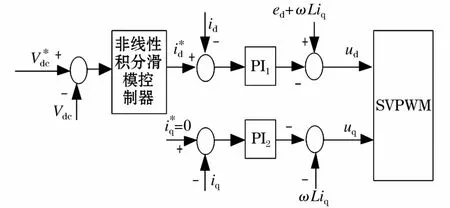
图4 非线性积分滑模控制框图Fig.4 Block diagram of nonlinear integrator sliding mode control
通过分析(21)微分方程可知ξ、k2影响系统在滑膜面上的运动品质,当k2较大时,由于惯性将会导致趋近滑模面速度过大引起抖振;当k2较小时,由于指数特性接近滑模面速度越来越小将会影响到达滑模面的时间,因此选取合适的ξ值,保证系统接近滑模面时保持一定恒定的速度接近滑模面,即使系统在有限时间内到达滑模面。
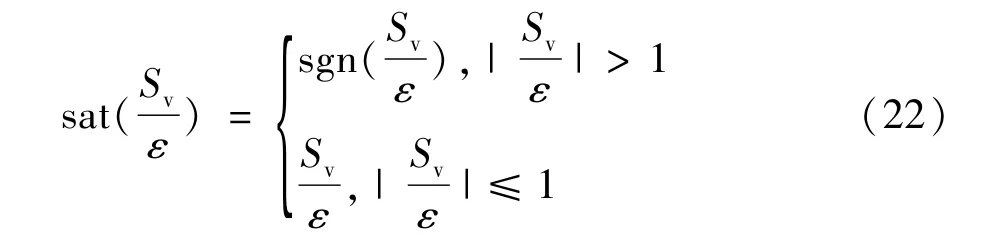
为了进一步削弱高频抖振,引入边界层的控制方法,在边界层内部为连续状态的的反馈控制,外部为正常的滑模控制。将式(21)中的开关函数 sgn(Sv)换位饱和函数 sat(Sv/ε),令:

即得到了滑模等效控制量。
3 仿真结果
采用MATLAB/SIMULINK搭建非线性积分滑模变结构、传统积分滑模和传统双闭环PI控制三相VSR的仿真模型。网侧输入的三相交流电压为160 V,输入电流峰值为20 A,频率50 Hz,输出直流电压为270 V。电容C为3 200μF,电感L为6.5 mH,负载电阻RL为18Ω。系统中含有3个PI调节器,经过模型参数计算可得,双闭环PI电压调节器参数设置为Kp=0.378,Ki=15.68。三相 VSR的开关频率为 10 kHz,k1=1,边界层厚度ε=0.5。
图5为非线性积分滑模变结构控制策略下的电网侧电压电流波形图,当系统运行稳定时从图中可以看出电网电压与电流同频同相。图6为功率因数
式中ε为饱和函数边界层的厚度。再联立式(18)、式(22)可解得控制量:图,从图中可以看出系统稳定运行时功率因数均在0.995以上,接近功率因数为1的控制,证明了该控制方法的正确性。
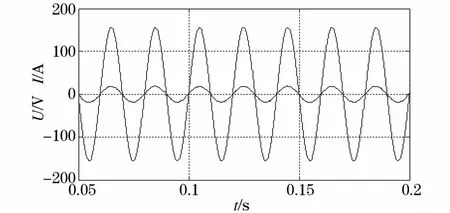
图5 交流侧侧电压和电流波形Fig.5 AC side voltage and current waveform

图6 功率因数图Fig.6 Power factor diagram
在0.2 s时负载发生突变,如图7所示为,三种控制方式输出的直流侧电压波形图。
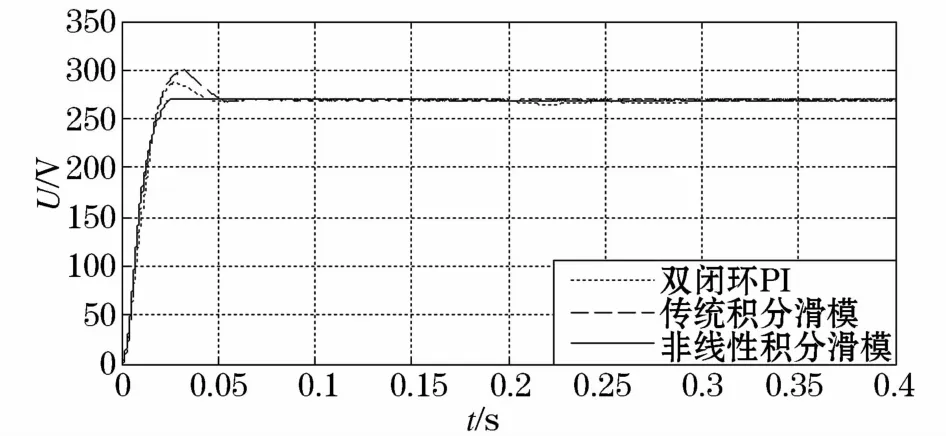
图7 直流侧电压Fig.7 DC side voltage
图8所示为三种控制方式输出直流侧电压超调部分对比图,表1为小波分析包抽取的数据和计算结果。传统积分滑模由于积分项的存在,初始误差较大时引起饱和效应,导致输出的直流侧电压超调量为11.6%,大于双闭环PI控制的6.4%,且到达稳态值得时间更长、效果更差。非线性积分滑模控制消除初始误差,使系统初始时刻便在滑模面上,因此输出直流侧电压超调很小仅有0.48%,且到达稳态值时间短,因此非线性积分滑模控制具有良好的跟踪能力。

图8 电压超调对比图Fig.8 Comparison diagram of voltage over-shoot
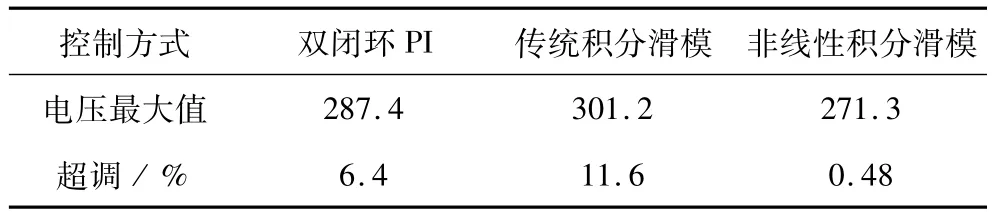
表1 电压超调数据Tab.1 Voltage over-shoot data
图9为负载发生突变时三种控制方式输出的电压波动对比图。从图中可以看出双闭环PI电压波动较大且到达稳态值时间较长。而传统滑模控制和非线性积分滑模电压波动很小,并很快恢复到稳定状态,两者均具有较强的抗扰能力。为进一步分析三种控制方式的特点,通过二维离散haar小波抽取数据进行3层分解可得的小波分析柱状图如图10所示。
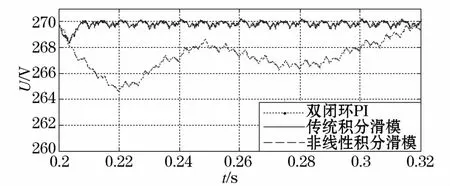
图9 电压波动图Fig.9 Voltage fluctuation diagram

图10 小波柱状图Fig.10 Wavelet histogram
由图10可以看出双闭环PI控制方式超调量大,抗扰能力较差导致稳态值所占百分比较小。传统滑模控制超调量大,但具有较强的抗干扰能力,因此稳态值所占的百分比较大。从中可以看出传统滑模控制因积分项的原因使输出电压超调部分和响应速度反而比双闭环PI的效果更差,但仍然具有较强的干扰能力。非线性积分滑模控制超调量小,抗干扰能力强,稳态值所占百分比大。因此非线性积分滑模使系统输出保持很小的超调量的同时又保持较强的抗干扰能力。
4 结束语
文章将非线性积分滑模控制应用到三相VSR中,在滑模面中引入积分项增强系统鲁棒性、减小稳态误差的同时又对积分项削弱,防止饱和效应带来的问题。最后通过仿真双闭环PI、传统积分滑模、非线性积分滑模三种控制方式的结果表明,非线性积分滑模使系统具有电压超调量小,抗干扰能力强,跟踪性能更好的特点。
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
系统工程学报(2015年2期)2015-02-28
