
某A00纯电动汽车驱动电机的匹配及其标定
2018-02-26 07:34谭明作
装备制造技术 2018年12期
谭明作
(柳州五菱柳机动力有限公司,广西柳州545005)
0 引言
能源危机和环境污染,这是当今世界面临的两大难题。地球石油的蕴藏量是有限的,石油资源将在未来一段时间内耗竭,现在世界能源消费是以石油为主导,为避免能源危机,必须要求能源消费结构发生改变。改革开放以来,我国经济得到快速发展,同时环境问题也日益突出。我国汽车市场已经成长为世界第一大汽车市场,国家一直重视汽车的尾气排放问题,汽车排放法规即将更新至国六标准。同时,在解决汽车能源结构问题上,国家也在大力鼓励PHEV、HEV、EV以及BSG/ISG弱混等新能源汽车的发展,并出台政策支持。动力电池成本持续减低,根据行业预测信息,到2020年,每千瓦时的电池成本有可能降低到80美元,新能源汽车产业发展前景乐观。随着政策的产生和执行,将带动汽车配套产业在新能源技术方面加速布局。
1 纯电动汽车整车电气系统
除了传统燃油车的控制单位,电动汽车还需要增加整车控制器(VCU:Vehicle Control Unit)。VCU通过采集油门踏板、刹车踏板、档位等信号,用以判定驾驶员的驾驶意图;再通过监控车辆状态,如车速、水温等信息,经过判断处理,然后向电机控制器(MCU:Motor Control Unit)和动力电池管理系统(BMS:Battery Management System)发出控制指令,同时,VCU还对仪表、安全气囊、空调压缩机等车载电力系统进行控制。
驱动电机、动力电池和整车控制器构成了纯电动汽车的典型结构。纯电动汽车整车电气系统框架如图1所示。
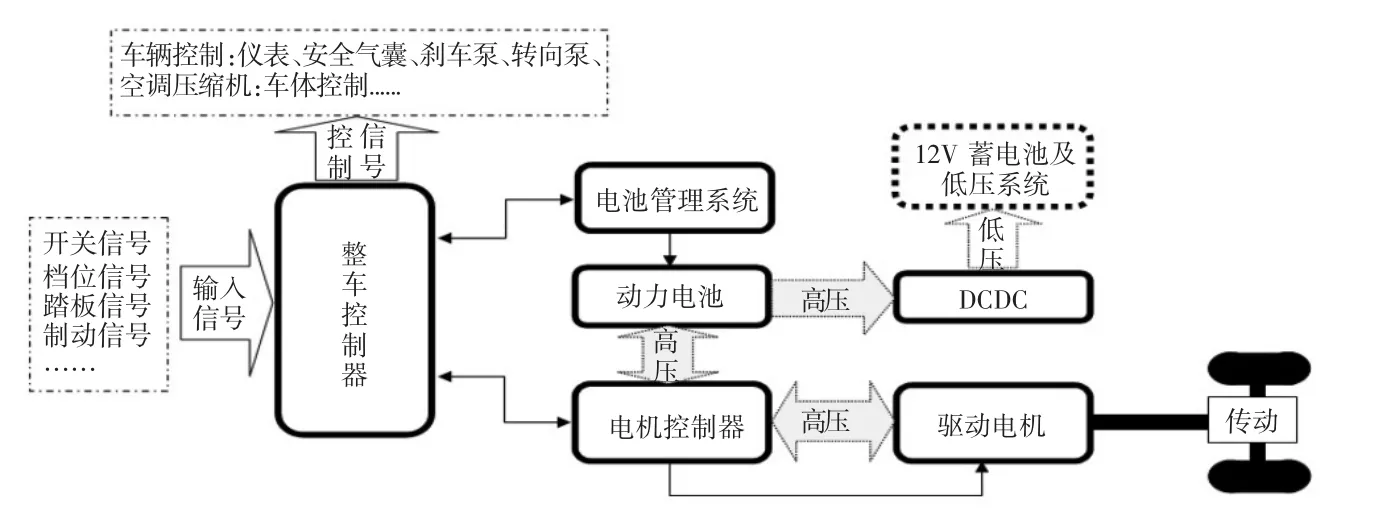
图1 纯电动汽车整车电气系统框图
纯电动汽车整车控制系统的功能定义,主要包括节能管理、舒适控制以及安全保障等。驱动电机转矩控制是整车控制系统功能的一个重要组成部分。纯电动汽车的动力性能主要取决于驱动电机、动力电池、传动系统及电控系统之间匹配[1]。
在对纯电动汽车动力系统进行匹配设计时,可根据动力系统指标选择合理的驱动电机参数,以满足整车的动力需求。动力系统评价指标包括:最高车速、爬坡性能和加速性能。
2 驱动电机参数的选择和匹配
纯电动汽车的驱动系统包括动力电池、驱动电机和电机控制器。驱动电机是纯电动汽车的机械输出单元。驱动电机的参数匹配,如:峰值/额定功率、最高/额定转速及峰值/额定扭矩等,需要根据整车的动力性要求来进行设计,在兼顾性能的同时需要考虑成本因素[2]。
2.1 纯电动汽车运动力学
根据车辆运动过程的受力分析,可以分为驱动力、滚动阻力、空气阻力、坡道阻力和加速阻力。汽车行驶过程受力示意图如图2所示。

图2 汽车行车过程受力示意图
根据图2,可得出汽车匀速行驶过程中的力学平衡关系。如式(1)所示。

式中:Ft为驱动力,N;Ff为滚动阻力,N;Fw为空气阻力,N;Fi为坡道阻力,N;Fj为加速阻力,N.
纯电动汽车的减速器速比、传动系统效率、轮胎半径、空气阻力系数、迎风面积、整车装备质量等指标参数确定后,可得出车辆的驱动力,如式(2)所示。

式中:Ttq为驱动电机转矩,N·m;ig为变速器各档位传动比;i0为减速器速比;ηT为动力传动系统机械效率,%;rd为车轮滚动半径,m.
滚动阻力计算,如式(3):

式中:m为整车装备质量,kg;g为重力加速度,取9.8m/s2;f为滚动阻力系数;α为道路坡度,rad.
空气阻力计算,如式(4):

式中:CD为车辆空气阻力系数;A为车辆迎风面积,m2;va为车辆行驶速度,km/h.
坡道阻力计算,如式(5):
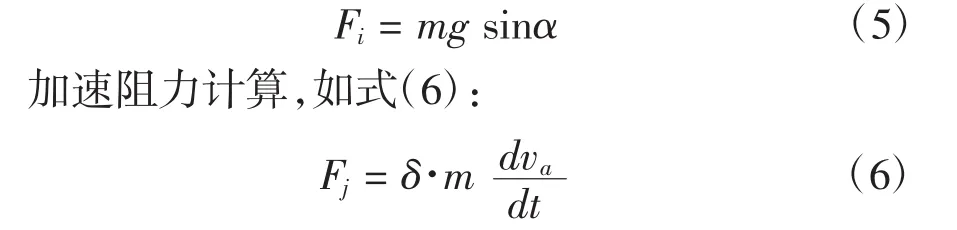
在进行动力性初步匹配计算时,由于不知道汽车轮胎等旋转部件准确的转动惯量数值,对于旋转质量换算系数δ,通常按经验公式进行匹配计算确定,经验公式如式(7)所示:

式中,δ1和 δ2取值范围:0.03~0.05;在进行计算时,通常取值 δ1= δ2=0.04.
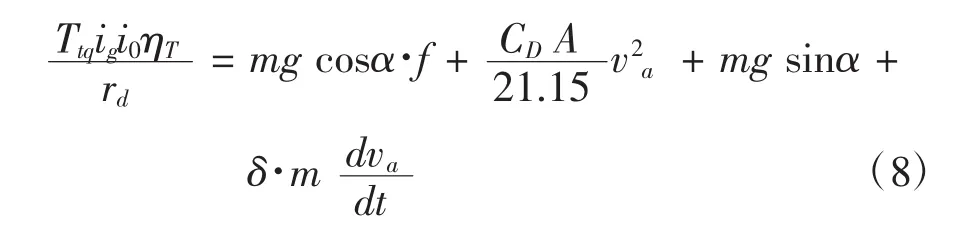
根据以上公式,可得汽车行驶过程中的力学平衡方程,如式(8)所示。
功率扭矩与转速的关系,如式(9):

汽车行驶速度与驱动电机转速的关系,如式(10):

可得纯电动汽车功率平衡方程式,如式(11):

2.2 纯电动汽车动力性能需求的计算
对于纯电动汽车,其动力性能需求,即为其驱动电机的功率和转矩的需求。在国标《GB/T 18385-2005电动汽车动力性能试验方法》中,将最高车速、加速时间以及爬坡度作为评价汽车动力性能的主要指标,如图2所示。
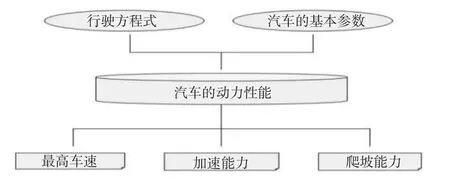
图2 汽车动力性能
2.2.1 整车的最高车速
整车的最高车速主要评价车辆的高速行驶能力。最高车速主要取决于驱动电机的额定功率、最高转速和变速箱的速比。设定当前车辆状态为在平坦路面下匀速行驶,即忽略坡道阻力和加速阻力时,最高车速下所需求的驱动电机最大功率方程式[3],如式(12)所示。

纯电动汽车最高车速时所需的功率,即为驱动电机的额定功率。
2.2.2 整车的爬坡性能
根据车辆的常规道路状况,一般车辆爬坡度范围在20%~30%.整车的爬坡性能用于评价车辆在大负载状态下和低速状态下的通过性能。当车辆以最低车速通过某一坡面时,所需驱动电机最大功率的方程式,如式(13)所示。
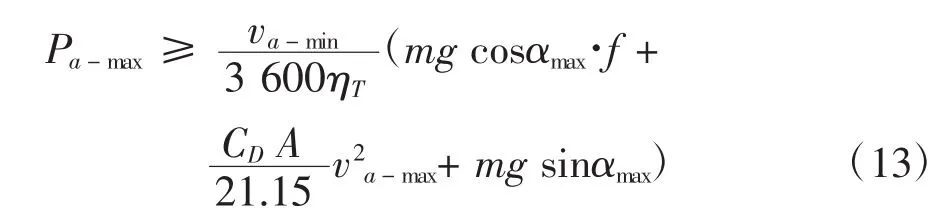
其中:va-min是所设计的最低通过车速;αmax为最大坡度角,αmax=arctanφmax.
对于纯电动汽车,最大爬坡性能主要取决于驱动电机的低速最大转矩输出能力和短时过载能力,因此爬坡性能决定了驱动电机的最大扭矩需求。
2.2.3 整车的加速性能
对于纯电动起来来说,驱动电机的最大输出功率能力决定了其整车的加速性能。在加速到目标车速的过程中,驱动电机所需要的最大功率的方程式,如式(14)所示。

车辆起步加速时,其车速曲线可以近似拟合为如下公式,如式(15)所示。

式中,a为拟合系数,计算中通常取值0.5,vm为加速后期车速;tm为加速时间。
由此可得,加速时需求的功率公式,如式(16):

纯电动汽车动力性能主要体现整车极限运动能力,与动力系统所能提供的功率和转矩密切相关,是满足驾驶需求的基本保证。对于大多数汽车,动力系统最大功率由加速性能指标决定,因此,纯电动汽车设计的加速性能决定了驱动电机的峰值功率。
2.2.4 某A00纯电动汽车驱动电机的参数匹配
对于纯电动商务车用驱动电机系统,峰值功率持续时间规定为60 s;对于纯电动乘用车和混合动力车用驱动电机系统,持续时间规定为30 s.纯电动汽车驱动电机额定区和峰值区之间的区域即为过载区,峰值与额定值的比值即为驱动电机的过载系数。根据动力与成本两个因素,驱动电机的过载系数取值范围通常定在2~3之间。
在驱动电机的峰值功率确定的情况下,如果过载系数过大,即额定功率过小,则会导致驱动电机长时间工作在过载状态,电机容易损坏,故障率增大。如果过载系数过小,即额定功率过大,则电机长时间工作在欠载状态,浪费电机容量。因此需要结合车辆的常规用途,合理选择驱动电机的过载系数,可有效利用电机容量,降低电机成本,并可延长电机使用寿命。
某A00纯电动汽车设计的基本参数,如表1所示。
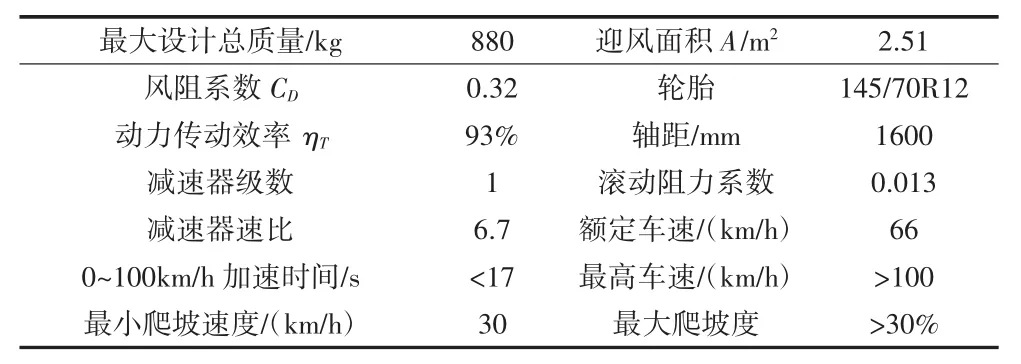
表1 某A00纯电动汽车基本参数表
将表 1参数代入式(12)、式(13)、式(16),分别计算出:最高车速时需要的功率Pv-max≥14.69 kW,爬坡时需要的功率Pa-max≥23.47 kW,加速时需要的功率Pacc≥29.96 kW.由此可知,当驱动电机满足加速性能要求时,该纯电动汽车的最高车速以及爬坡性能也能得到满足。根据式(2),可知在爬坡时需要的扭矩Ta-max≥ 103.8 N·m.
因此,最终为该A00纯电动汽车匹配驱动电机时,以加速性能来确定峰值功率,以最高车速性能来确定额定功率,最终参数确定峰值功率为30 kW,额定功率为15 kW,峰值扭矩为105 N·m.
最高车速决定了驱动电机的最大转速。根据式(10)可知驱动电机转速与汽车行驶速度的关系,如式(17)所示。

过计算可以得出,该A00级纯电动汽车驱动电机的理论最大转速需求为7 195 r/min,计算出额定转速为4 749 r/min.最终该车型驱动电机转速参数确定最高转速为7 500 r/min,额定转速4 750 r/min.通过式(9),可知驱动电机额定转矩为30 N·m.该A00纯电动汽车最终匹配的驱动电机性能参数如表2所示。

表2 某A00纯电动汽车驱动电机匹配参数
3 驱动电机标定
这款A00纯电动汽车的驱动电机为永磁同步电机(PMSM),采用FOC控制。FOC控制主要包含了电流采样、坐标变换和SVPWM,通过Clark坐标变换,把三相静止电流转换成两相电流,再经过Park坐标变换,将静止的电流变换成旋转的电流,得到交轴电流Iq和直轴电流Id(它们是相互垂直的并且同时跟随着磁场方向在旋转),经运算后,得到控制电压命令,从而产生PWM控制信号,实现对PMSM的精准控制。
根据驱动电机的参数,对电机进行设计开发,在新电机完成开发后,为了提高电机控制的扭矩控制精度,实现动力系统效率最优控制,必须对新电机进行标定开发,以获取准确的电机参数、准确的旋变位置信息,最优效率工作点,以及电机的运行性能。驱动电机控制的核心是在直流电压和电压利用率的约束内,尽量输出更大的转矩、达到更大的转速。因此需要找到合理的Iq/Id指令组合用于控制,实现预期的性能目标。
驱动电机标定开发的主要内容包括电机本体基本参数获取、传感器标定、旋变零位标定、电机特性标定以及标定数据的验证。根据车辆的NVH状况,如是驱动方向产生的固定频率震动,还需要对电机扭矩控制的PID参数进行标定。
4 结论
本文中的某A00纯电动汽车,主要用于市区代步使用,在驱动电机匹配设计时,在满足动力性时,还需要兼顾经济性,从而使整车成本具备竞争优势。本文以整车设计的基本参数为依据,通过汽车的动力性能评价来确定驱动电机参数,以及简要介绍驱动电机的控制和标定,为纯电动汽车驱动电机的匹配设计提供参考。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
消费导刊(2018年10期)2018-08-20
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
汽车维护与修理(2015年5期)2015-02-28
