
GNSS RTK接收机检定的国际标准ISO 17123-8及其实验结果分析
2018-03-06 12:28陈海林
导航定位学报 2018年1期
陈海林
(中海石油技术检测有限公司,天津 300452)
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)技术在各个行业获得了广泛的应用,成为野外导航定位的有力工具。传统的静态测量需要较长的测量时间,除特别需要进行高精度测量外,一般都采用实时动态载波相位差分(real time kinematic,RTK)的方法来获取待定点的3维坐标。RTK的实质就是把基准站观测到的载波相位观测值和基准站的位置信息以一定的格式通过数据传输设备实时地传送给流动站,在流动站组成差分方程,实时地给出用户所在位置的厘米级3维坐标信息和精度指标[3]。基准站(亦称为参考站)的作用是为流动站提供提供改正信息,用以消除或降低多路径效应、电离层影响、对流层影响等对测量结果的影响,基准站可以是与流动站相距几千米的另外一台GNSS接收机(该台GNSS接收机可以架设在已知点上,也可以架设在未知点上);也可以是来自连续运行参考站(continuously operating reference stations,CORS)的虚拟参考站[4-5],这种方法也称为网络RTK。
为了检定RTK的测量精度,国家测绘地理信息局曾于2009年发布了全球导航卫星系统(GNSS)测量型接收机RTK检定规程CH/T 8018—2009[6],该规程已经应用到了我国的GNSS RTK接收机的检定中,也为广大测绘工作者所熟知。但CH/T 8018—2009仅仅是国内标准,与国际标准化组织(International Organization for Standardization,ISO)发布的国际标准ISO 17123-8[7]相去甚远。采用国际标准、消除技术壁垒,是国际社会的通行准则。本文就有关GNSS RTK接收机检定的国际标准ISO 17123-8作一介绍,供广大从业者参考。
1 国际标准ISO 17123-8检定方法
国际标准ISO 17123-8采用图1所示的场地来检定GNSS RTK接收机。如果是网络RTK,则不需要基站。两个流动站之间的距离a为2~20 m;流动站之间水平距离及高差用除RTK方法之外的其他方法测定,其精密度优于3 mm,这些值称为参考值,参考值用来考察检核用流动站坐标计算出的流动站之间的距离和高差之间是否存在异常值,参考值并不参与统计检验;流动站与基准站之间的距离b与执行的任务相匹配;流动站及基准站上天线的对中精度为1 mm;天线高的测量精度为1 mm。
国际标准ISO 17123-8检定过程的观测数据由不同序列构成,每个序列包含5组观测数据,每组观测数据包含流动站1及流动站2的连续观测数据。相邻观测数据组之间的时间间隔为5 min,这样一个序列的5组观测数据需要25 min。由于多路径效应影响的变化周期为20 min,因此这5组观测应该均匀分布在这25 min之内。为了克服卫星星座结构变化、电离层及对流层对检定结果的影响,相邻序列的起始时间至少需要相隔90 min。这样获得的检定结果才能够反映各种误差对RTK测量结果的影响。
国际标准ISO 17123-8有2种不同的野外检定过程即简化检定及完整检定。简化检定只包含一个序列,只进行异常值探测,不进行统计检验。完整检定包含3个序列,可以进行标准差计算及统计检验。
1.1 简化检定
如前所述,简化检定只需要一个序列,5组观测。表1表明了简化检定采集数据的顺序。
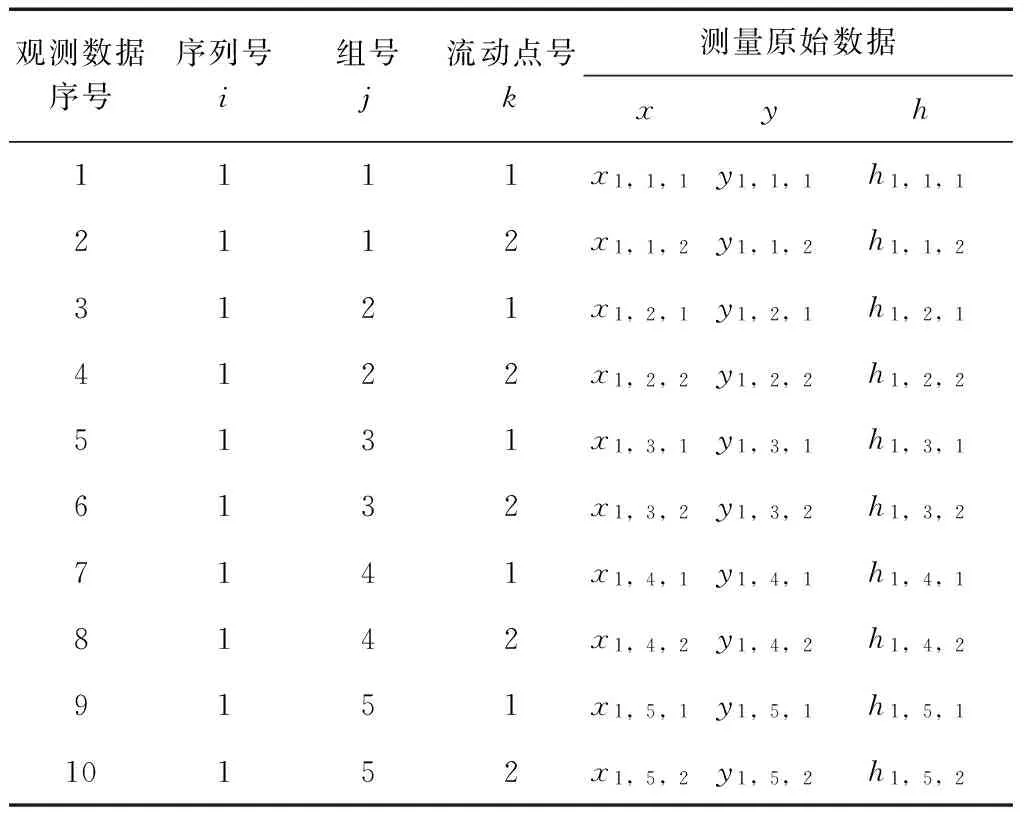
表1 一个序列的测量顺序
数据采集后,计算第i(这里i=1)个序列中的第j组(这里j=5)数据所获取的2个流动站之间的水平距离、高差及与参考值之间的平差为
i=1;j=1,…,5。
(1)
式中:xi,j,k、yi,j,k及hi,j,k分别为流动站的3维坐标x、y、h;i为序列号;j为组号;k为流动站号;Di,j、Δhi,j分别为计算出流动站之间的水平距离和高差与参考值的差值;D*、h*分别为流动站之间水平距离及高差的参考值;εDi,j、εhi,j分别为水平距离及高差的偏差。由此计算出
(2)
式中:sxy、sh为完整检定获得水平距离及高差标准差;当然sxy、sh也可以是由仪器生产厂家标出的技术指标。
如果由式(1)计算出的结果不满足式(2)中的任意一项,则有足够的理由怀疑这次检定结果是不可靠的,需要重新进行检定。
1.2 完整检定
完整检定包含3个序列,即完整检定由3个简化检定组成;相邻的简化检定起始时间至少需要相隔90 min。
在进行数据处理之前,需要对着3个简单检定获取的数据分别进行处理,处理方法与前述一致,确保每一个简单检定的数据中都不包含粗差。处理步骤如下:
(3)
(k=1,2)
依据观测值及式(3)可以计算出残差r为
(4)
(i=1,2;j=1,…,5;k=1,2)。
计算残差平方和为
(5)
流动站坐标的自由度vx、vy及vh是相等,其计算公式为
vx=vy=vh=(i·j-1)·p=
(3×5-1)×2=28
(6)
最后可以求出流动站坐标单次测量的实验标准差sx、sy及sh为
(7)
由式(7)可以求得GNSS RTK平面位置(x,y)的实验标准差sxy为
(8)
依据式(7)同样可以计算出流动站平面位置的标准不确定度uISO-GNSS?RTK-xy及高差的标准不确定度uISO-GNSS?RTK-h为:
uISO-GNSS?RTK-xy=sxy;
(9)
uISO-GNSS?RTK-h=sh。
(10)
为了说明在相应自由度下获得的sxy及sh的性质后,需要回答以下问题:
1)平面位置的单次实验标准差sxy是否小于或等于制造商给出值σxy或小于其他方法给定的值σxy?
2)高差的单次实验标准差sh是否小于或等于制造商给出值σh或小于其他方法给定的值σh?
①同一台仪器在不同的时间进行的2次测量;
②不同仪器进行的2次测量。
在置信水平为1-α=0.95、自由度为vx+vy=56的条件下,可以构成表2所示的假设检验。

表2 测量结果的统计检验
对表1做如下说明:
1)问题1中的零假设为获得的平面位置(x,y)的实验标准差sxy是否等于平面位置的理论精度(或者预先给出的值)σxy?只有满足下列条件,才能够接受零假设:

(11)

(12)
(13)
(14)
如果不满足式(14),则拒绝零假设。
2)问题1中的零假设为获得的高差h的实验标准差sh是否等于高差的理论精度(或者预先给出的值)σh?只有满足下列条件,才能够接受零假设:
(15)

(16)

(17)
(18)
如果不满足式(18),则拒绝零假设。


(19)
(20)
F0.975(56,56)=1.70;
(21)
(22)
如果不满足式(22),则拒绝零假设。

(23)
(24)
F0.975(28,28)=2.13;
(25)
(26)
如果不满足式(26),则拒绝零假设。
对测量结果进行不确定度评定是衡量测量质量的重要方法。表3给出了不确定度的来源。

表3 GNSS(RTK)测量的误差源及测量不确定度评定
从表3可以获得平面位置坐标的合成测量不确定度为
(27)
式中ha为天线高。
从表3可以获得垂直坐标的合成测量不确定度为
(28)
取包含因子k=2,则可得扩展不确定度为:
Uxy=2·uxy;
(29)
Uh=2·uh。
(30)
2 实验检定及结果分析
实验检定用的设备为海星达H32,其标称的RTK 定位精度:平面为±(10 mm+1×10-6×D);高程为±(20 mm+1×10-6×D)。采用按照图1所示的设定流动站及基准站:2个流动站之间的距离为15 m,高差相等;基准站至流动站之间的距离为100 m。流动站之间的距离及高差采用标称测距精度为±(1 mm+1.5×10-6×D)、测角精度为±1″的TC-1201全站仪进行测量,其结果为水平距离参考值D*= 14.99847 m,高差参考值h*=3.33 mm。
2.1 简化检定
完全按照ISO 17123-8的要求获取实验数据,见表4。

表4 简化检定测量数据测量的误差源及测量不确定度评定
按照式(1)及表2的数据,可以获得表3的计算结果。

表5 简化检定的计算结果
由表3可以看出,海星达H32的检定结果满足了国际标准ISO 17123-8的要求,与计量检定结果一致。
2.2 完整检定
完全按照ISO 17123-8的要求获取了3个系列实验数据,为了节省篇幅,这里仅仅列出按照式(7)及式(8)计算出的平面位置的实验标准差为sxy=7.5 mm;高差的实验标准差为sxy=16.1 mm。按照仪器生产厂家给出的技术指标,有σxy=10 mm;有σh=20 mm,则表明都接受零假设,这套GNSS RTK的测量精度达到了仪器的出厂指标。
由于测量不确定度还没有在测绘行业广泛应用,限于篇幅,本文也不对检定结果进行测量不确定度评定。
3 结束语
GNSS RTK技术已经成为一种常规测量手段,在测绘生产实践中使用频繁。按照CH/T 8018-2009 全球导航卫星系统(GNSS)测量型接收机RTK检定规程[6]的规定,其检定周期为1年,这表明在这1年的有效期内,该套GNSS RTK的测量结果都应该能够满足精度要求。但实际情况并非如此,各种因素的影响将导致GNSS RTK测量结果的精度降低,需要经常重新对仪器进行检核。如果时常将仪器经常送到仪器检定中心进行检定,不仅费时费力,而且还会耽搁测绘任务的工期。因此,在仪器检定的有效期内,建议作业单位自己按照ISO 17123-8所提出的检定方法,对GNSS RTK进行检核,以确认仪器处于良好工作状态。
[1] 刘春保.2016国外导航卫星发展回顾[J].国际太空,2017(2):34-42.
[2] 中国卫星导航系统管理办公室.北斗卫星导航系统简介[EB/OL].[2017-05-28].http://www.beidou.gov.cn/xtjs.html.
[3] 张振军,谢中华,冯传勇.RTK 测量精度评定方法研究[J].测绘通报,2007(1):26-28.
[4] 付兆祥,雷小鹏,唐红涛.基于CORS系统的网络RTK在图根控制测量中的应用[J].北京测绘,2016(5):117-120.
[5] 曹鸽,王玉柱.GPS、RTK、网络RTK技术在工程测量中的应用[J].北京测绘,2012(5):83-85.
[6] 国家测绘局.全球导航卫星系统(GNSS)测量型接收机RTK检定规程:CH/T 8018—2009[S]. 北京:测绘出版社,2009.
[7] International Organization for Standardization(ISO).Optics and optical instruments - Field procedures for testing geodetic and surveying instruments - Part 8:GNSS field measurement systems in real-time kinematic (RTK):ISO 17123-8[S]. 2nd ed.Switzerland:ISO,2015.
猜你喜欢
煤气与热力(2021年10期)2021-12-02
医学美学美容(2021年21期)2021-11-20
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
装饰装修天地(2020年11期)2020-07-04
医学新知(2019年4期)2020-01-02
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
中国绿色画报(2017年9期)2017-09-16
房地产导刊(2015年6期)2015-10-21
