
发动机缸体柔性生产线自动上下料装置研究
2018-03-20 06:11房长兴
制造技术与机床 2018年2期
毕 岩 房长兴
(①沈阳机床股份有限公司,辽宁 沈阳 110141;②华晨宝马汽车有限公司,辽宁 沈阳 110044)
随着劳动力成本的不断提高,在机械制造加工行业,使用各种自动化设备辅助传统加工实现无人自动化生产已是大势所趋[1]。发动机缸体作为汽车发动机的核心部件之一,其柔性加工生产线中机器人自动上下料装置的设计对于提高整线加工精度和效率有重要意义。
1 总体方案设计
基于生产线规划的精益制造原则、柔性生产原则、精益自动化原则、精益平面布置原则[2],完成生产线的布局如图1所示。8台机床串联布置,实现缸体各面的粗加工与半精加工,要求机器人实现8台机床的自动上下料。
机器人上下料装置通常有3种形式,悬挂式机器人(悬架+倒挂式关节机器人+机械手爪)、轨道移动式机器人(移动轨道+关节机器人+机械手爪)和龙门式机器人(桁架机器人+机械手爪)。这3种形式的优缺点对比如表1。
表1 机器人方案对照表
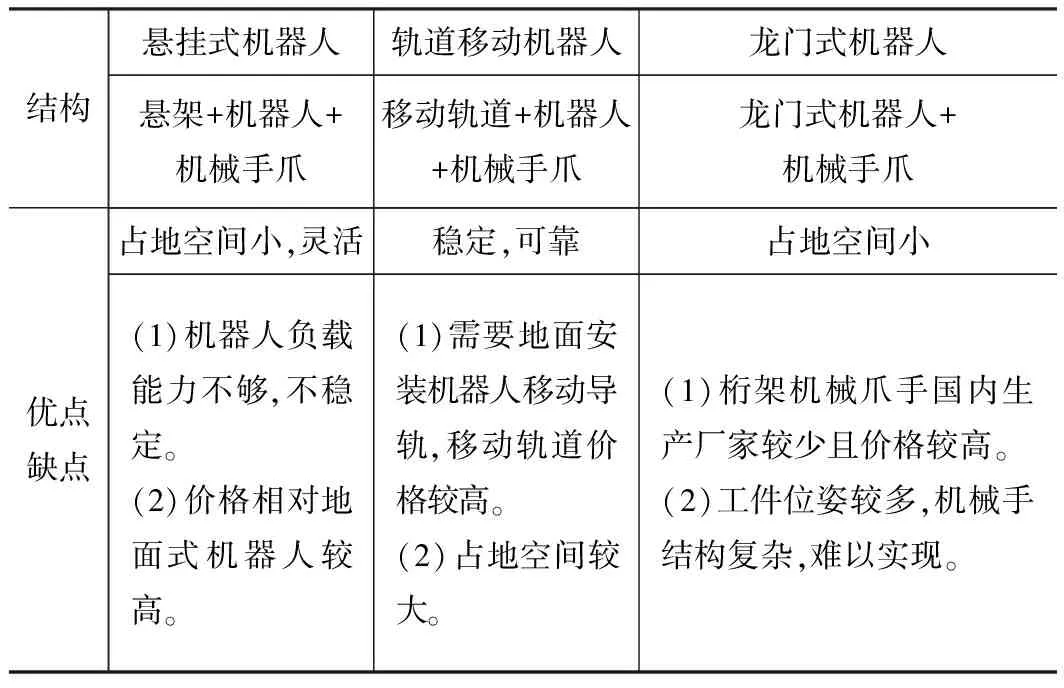
结构悬挂式机器人轨道移动机器人龙门式机器人悬架+机器人+机械手爪移动轨道+机器人+机械手爪龙门式机器人+机械手爪优点缺点占地空间小,灵活稳定,可靠占地空间小(1)机器人负载能力不够,不稳定。(2)价格相对地面式机器人较高。(1)需要地面安装机器人移动导轨,移动轨道价格较高。(2)占地空间较大。(1)桁架机械爪手国内生产厂家较少且价格较高。(2)工件位姿较多,机械手结构复杂,难以实现。
因为生产线要求机器人负载能力较大(抓取重量≥150 kg;其中,缸体重量80 kg,夹具70 kg),缸体加工过程中位姿较多,为了确保抓取中的稳定可靠,通过对比3种方案,初步选择轨道移动机器人(移动轨道+关节机器人+机械手爪),根据其具体结构完成总体方案的设计,如图2所示。


2 机器人选型及轨道设计
由于上下料过程需要较多的位置和姿态的变换,故采用六轴关节机器人。综合考虑搬运行程及搬运重量等因素,选择那智不二越ST210F机器人,其技术参见表2。
表2 ST210F技术参数

型号ST210F-01结构关节型自由度6驱动方式AC伺服方式最大可搬重量/kg210设置条件落地式主机重量/kg1110
为了实现机器人在8台机床自动上下料,特在六轴关节机器人的基础上拓展第七轴——直线行走轴,以承载、驱动、导引机器人沿给定的方向直线运动,需要进行直线轨道的设计。轨道设计的关键点是具有足够的承载能力,且能承受机器人操作时产生的倾覆力矩。承载重量主要包括机器人本体、机器人手爪及发动机缸体等自动上下料装置。而在机器人自动上下料时,操作手臂需要伸出距离较大,而机器人操作手臂末端爪手和发动机缸体重量较大,对机器人移动导轨造成倾覆力矩。根据上述条件,最终选择齿轮齿条+导轨的结构形式。
3 机器人爪手设计
机器人爪手设计要求夹持缸体具有一定的刚度与强度。机器人抓取缸体应能够顺利地把缸体放进夹具中,便于刀具加工。机器人爪手的结构设计,如图3所示。根据目前现有的发动机模型,对机器人手爪抓取缸体的定位方式和夹持点进行设计,选择左侧面的一面两销进行定位,如图4所示。



4 缸体位姿的确定
位姿是指确定缸体在输送料道和机床夹具上的位置和姿态。为了方便缸体在料道上运输和夹具定位装夹,以及机器人抓取时缸体位姿变换尽可能的少,所以我们需要确定缸体在整线中的位姿,从而减少机器人动作节拍,提高工作效率。
缸体在粗加工、半精加工线的位姿如图5所示。
缸体在输送料道的位姿要求缸体在输送料道的输送过程中尽可能的平稳,与料道导轨的接触面尽可能大;在机器人上料区时,便于机器人的抓取,减少机器人手爪抓取缸体过程中的调整时间;尽可能采用一套机器人手爪完成整线中缸体的上下料工作。缸体在输送料道上料区位姿如图6所示,缸体顶面向上,底面与料道导轨相接触,前后端面与输送料道方向相同。初步选取缸体的前、后端面为机器人手爪的抓取面,选取前、后端面水道孔为手爪定位孔。
5 结语
本文根据现有的柴油发动机缸体生产线模型完成了机器人自动上下料系统的搭建,通过调研分析国内外机器人、机械手等自动上下料装置,根据柴油发动机生产加工的特点,基本确定了以轨道行走式机器人自动输送方式的技术方案。大幅缩短加工准备和辅助工时,节省人工并提高加工可靠性,使机床无人化运转得以实现,显著提高劳动生产率。
[1] 杨俊,卢勇,吴义荣.基于GSK-RB工业机器人的电机端盖加工自动上下料功能实现[J].机电工程技术,2013,42(7):42-44.
[2]董正荣.NSE气缸盖生产线的规划与工艺分析[J].柴油机设计与制造,2011,17(1):35-43.
猜你喜欢
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年3期)2020-12-25
中国惯性技术学报(2020年4期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
装备制造技术(2019年6期)2019-08-15
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2018年24期)2019-01-03
科技与创新(2018年12期)2018-06-22
荣誉杂志(2017年7期)2017-08-23
