舰载机着舰下滑段飞行员操纵策略研究*
2018-03-21 06:14刘嘉向锦武张颖甄冲
动力学与控制学报 2018年1期
刘嘉 向锦武 张颖 甄冲
(1.海军航空大学,烟台 264001) (2.北京航空航天大学航空科学与工程学院,北京 100191)
引言
除自然环境外,舰载机着舰还将受到引导光束基准角、飞机返航重量、飞行速度、飞行姿态等因素影响[1,2].对于同型号飞机,母舰通常以统一的引导光束进行下滑引导[3].但由于执行任务不同,燃油弹药等消耗不同,即便是同型号飞机每次返航着舰重量也不可能完全一样.而对于不同着舰重量飞机,其配平状态将不同,即不同重量将对应不同的下滑速度和迎角.理论上飞行员可以根据着舰重量在多种配平状态下进行着舰.但从进入下滑道窗口到着舰一般仅有不到30秒时间,在这短短30秒内每次都要根据飞行状态临时配平又要反操纵进行轨迹跟踪,这将给飞行的操纵带来极大挑战[4,5].因此实际飞行中,飞行员通常以某种原则和策略进行操纵,即目前所存在的“保持速度不变”和“保持迎角不变”操纵策略(以下简称为“保速度”和“保角”策略,在图表中分别用“V-hold”和“a-hold”指代).即无论飞机着舰重量如何变化,飞行员在跟踪下滑光束的同时,要么保持基准速度不变,要么保持基准迎角不变.进而实现轨迹跟踪和着舰.以往着舰策略研究,大多集中在自动着舰轨迹跟踪和动力补偿方案设计方面[6-13],如文献[8]论证了动力补偿必要性,文献[11-12]通过构建驾驶员模型,比较了“背面技术”和“前面技术”在着舰轨迹跟踪效果上的差异,证明了“背面技术”优越性.分析了飞机设计中影响着舰轨迹控制的关键因素;文献[9]给出了“保速度”和“保角”策略的自动控制动力补偿方案;文献[10]分析了着舰轨迹稳定性变差的原因和动力补偿的必要性.这些文献对两种策略的自动控制实现方法进行了研究.文献[14]对飞行员进舰过程的变策略控制模型进行了研究,但这一策略更倾向于研究飞行员本身固有的思维判断过程而不是本文所指的操纵方法和原则.综上,以往研究没有从飞行员的视角研究着舰策略与操纵方法,没有比较“保速度”和“保角”策略在着舰效果上的最终差异,无法直接用于飞行训练指导.目前虽然舰载机动力补偿系统已较为成熟并逐渐成为舰载机标准配置之一,但作为任务的最终执行者,作为自动驾驶的最终备份,飞行员必须掌握“手动”反区操纵技巧,才能具备上舰资格.因此,从操纵角度,研究舰载机着舰操纵策略有着重要意义.
本文针对不同返航重量下如何提高着舰精度这一问题,对飞行员操纵策略进行研究.研究思路是,首先对需要应用的数学模型进行介绍,而后对“保速度”和“保角”策略“基准状态”进行探讨,基准状态研究是后续着舰操纵策略研究的基础.所谓“基准状态”就是飞行员操纵策略中所要保持的参考状态,如“保角”策略中的基准迎角角度、“保速度”策略中的基准速度等.然后,针对着舰操纵行为和飞行操纵策略得到对应模型被控对象,最后通过人-机-环境闭环仿真和着舰点分布比较,分析着舰策略差异及其成因.这一研究可为飞行员实际操纵提供理论参考,为自动着舰系统设计提供借鉴.
1 数学模型
1.1 数学模型简介
进行驾驶员操纵策略研究,开展人-机-环境仿真,需要用到飞机动力学模型、舰船运动模型、大气扰动模型、飞机运动学模型、飞机驾驶员模型等数学模型.其中飞行动力学模型本文采用经典的小扰动方程进行描述[15].大气扰动模型采用文献[16]舰尾流模型和大气紊流模型.对于舰船运动模型,由于舰船运动将进一步使飞机着舰点发散,为便于比较着舰策略影响,此处假设舰船匀速直线行驶且没有受风浪影响产生六自由度运动.在运动学模型中,通过坐标变换,可以得到飞机尾钩运动学模型、飞行员观察视线运动模型以及甲板运动模型等,通过这些模型可以仿真绘制着舰轨迹和飞机着舰点分布.在飞机驾驶员模型中,本文采用文献[17]提供的具有自适应能力的飞机驾驶员最优控制模型.限于篇幅,上述数学模型不再赘述.
1.2 人-机-环境闭环仿真算法流程
飞行员操纵下的人-机-环境闭环仿真算法流程如图1所示,具体步骤如下:
步骤一,构建带有延迟环节的增广被控对象;
步骤二,根据飞行任务,构建飞行员最优控制指标函数和操纵策略数学模型,确定模型参数;

图1 人-机-环境闭环仿真算法流程Fig. 1 Algorithm implementation of Pilot-Aircraft-Environment simulation
步骤三,计算飞行员最优控制增益;
步骤四,控制方程离散化及自适应状态估计;
步骤五,求解驾驶员操纵向量,人机系统时域仿真.
2 着舰操纵基准状态研究
本文所述“操纵基准状态”是指飞行员“保速度”策略中所要保持的速度和“保角”策略中所要保持的迎角.理论上,当飞机着舰重量不变,以恒定下滑角进近时,飞行员可以采用多种配平状态进行着舰,即每一着舰重量都对应一个“速度-迎角”状态集.在这一集合内,通常根据失速迎角、复飞要求、起落架冲击载荷限制等因素最终确定一个着舰进近速度.那么当着舰重量不同时,就存在一个与着舰重量对应的进近速度集.那么对于随机的着舰返航重量,飞行员应该以什么样的速度或迎角进行着舰呢?下面就这一问题进行研究.本文以A-4D型飞机为算例对操纵基准状态以及后续着舰策略进行分析.飞机基本参数详见文献[18].假设飞机以恒定下滑角γ=-3.5°进行进近,通过配平计算,得到不同着舰重量下(文中不同着舰重量采用着舰最大有效载荷百分比表示,Maximum Payload简称MP)配平需用推力和配平迎角如图2~3所示.

图2 配平需用推力曲线Fig. 2 Thrust curves required in trim

图3 配平需用迎角曲线Fig. 3 Angle curves of attack (AOA) Required in trim
由图2~3可见,着舰重量越大,配平速度和迎角越大.因此,为避免满载返航失速,应以最大着舰重量状态作为着舰操纵基准状态.由于数据有限,暂不考虑复飞要求和着舰冲击等其它限制因素,仅通过失速迎角限制确定着舰进近速度.假设失速迎角αs=22°,根据失速迎角和配平迎角曲线,可以确定飞机的失速速度为65.87m/s,而后按照进近速度为失速速度1.15倍确定飞机的着舰进近速度[16],这一速度即为“保速度”策略的基准速度,这一速度对应的迎角即为“保角”策略基准迎角.最终明确对于不同着舰重量返航操纵,应以最大着舰重量作为操纵基准状态,确定“保速度”策略基准速度Vappoach=75.75m/s,“保角”策略基准迎角αappoach=16.34°.同时注意到,当飞机以这一状态进行进近时,飞机处于操纵反区.
3 着舰操纵策略研究
为比较“保速度”和“保角”策略着舰效果,本文首先对着舰策略进行数学建模,而后进行人机闭环着舰仿真,考察两种策略下的着舰分布效果,最后对造成二者差异的成因进行分析.
3.1 着舰操纵策略数学模型
进行着舰操纵策略研究的关键是如何对现实中的飞行员操纵原则进行数学描述.下面首先对被控对象进行构建,而后根据实际驾驶要素对操纵策略进行建模,最后确定飞行员参数并计算控制增益.由此实现了对飞行员操纵策略的数学描述,并可以得到飞行员在不同策略下的操纵输出.
3.1.1 控制方程
飞行员模型中的被控对象为飞机动力学模型,以小扰动方程描述飞机动力学模型

(1)
“保速度”策略飞行员的驾驶原则是,在保持眼部跟踪下滑光束的同时,尽量保持基准速度不变,即飞行员以高度误差和速度误差作为观察要素进行飞机操纵,由此确定状态方程纵向状态向量和操纵向量为:
xvzx=[ΔV,Δα,Δq,Δθ,Δh/V]T
(2)
(3)
u=[δe,δP]T
(4)
与之类似,“保角”策略驾驶原则是,保持眼部跟踪下滑光束的同时,尽量保持基准迎角不变,由此确定“保角”策略纵向状态向量和操纵向量为:
xazx=[ΔV,Δα,Δq,Δθ,Δh/V]T
(5)
(6)
uzx=[δe,δP]T
(7)
两种策略下横航向状态向量是一致的,均以航向偏差和滚转角误差作为观察要素,由此确定状态向量和操纵向量如下:
xhx=[Δβ,Δp,Δr,Δφ,Δψ,Δyg/V0]T
(8)
(9)
uhx=[δa,δr]T
(10)

3.1.2 飞行员操纵策略数学描述
假设理想情况下,飞机已进入下滑道窗口,此时飞行员将根据下滑光束和舱内仪表进行轨迹跟踪和着舰.飞行员的操纵原则是在保持跟踪下滑光束的同时尽量保持基准速度或基准迎角不变.由于人本身的最优控制属性,飞行员将尽量采用最小的操纵量和操纵速率实现这一目标.由此可以得到两种策略下最优控制模型的目标函数如下:
(11)
(12)
(13)
(14)
这一目标函数和加权矩阵体现了操纵策略的核心数学要素.其中下标“v”代表“保速度”策略、下标“α”代表“保角”策略;Jzx、Jhx分别是纵向和横航向目标函数,eh为高度误差、ev为速度误差、eα为迎角误差、Rzx是纵向操纵加权矩阵、Fzx是纵向控制速率加权矩阵,eyg是飞机横向偏离误差、eφ是滚转角误差、Rhx是横航向操纵加权矩阵、Fhx是横航向控制速率加权矩阵.飞行员生理参数按照平均水平进行选取[18].由于座舱内没有迎角变化率显示设备,且着舰时并未要求下沉率最小,因此暂不将迎角变化率和下沉率作为指标函数状态向量,由此“保速度”策略下飞行员观察向量仅有eh、ev、eyg、eφ;“保角”策略下飞行员观察向量为eh、eα、eyg、eφ.因此两种策略下,纵向和横航向观察加权矩阵均为Qyzx=Qyhx=diag([1,0,1,0]),假设飞行员对油门杆、驾驶杆、脚蹬投入驾驶精力相同,则操纵加权矩阵Rzx=Rhx=diag([1,1]),综上,得到飞行员模型参数如表1所示.
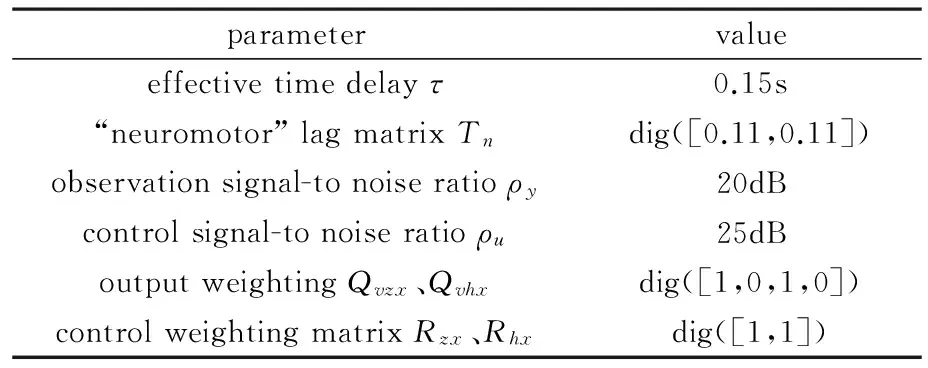
表1 飞行员模型参数Table 1 Input parameters of pilot model
根据驾驶员模型计算流程,以给定神经动力延迟矩阵Tn为终止条件,循环计算得到不同着舰重量下,控制速率加权矩阵F如表2所示.由此可以进一步开展人机闭环着舰仿真.

表2 飞行员模型计算结果Table 2 Calculation results of pilot model
3.2 着舰策略仿真
根据飞行员模型计算结果和仿真流程,可以得到着舰时间历程飞行员操纵量和飞机动态响应.如图4~7以20%最大着舰重量为例,示出了飞行员操纵量、飞机纵向及横航向动态响应.由图4~5可见,着舰过程中升降舵和油门是主要操纵量,飞行员在着舰任务中对纵向操纵投入的精力相对要多.但同时也应注意到,由于着舰区域与舰船运动方向成一定夹角,以及横航向扰动气流的存在,飞行员在进行纵向轨迹跟踪的同时,还需要操纵副翼和方向舵对航向偏差和飞机滚转姿态进行修正,如图7示出了两种策略飞行员操纵下横航向飞机动态响应.

图4 “保速度”策略飞行员操纵量Fig. 4 Pilot control in V-hold principle

图5 “保角”策略飞行员操纵量Fig. 5 Pilot control in a-hold principle

图6a 两种操纵策略下的速度响应对比Fig. 6a Comparison of velocity responses in control of a-hold and V-hold principles

图6b 两种操纵策略下的迎角响应Fig. 6b Angle of attack responses in control of a-hold and V-hold principles

图6c 两种操纵策略下的俯仰角速度响应Fig. 6c q responses in control of a-hold and V-hold principles

图6d 两种操纵策略下的俯仰角响应Fig. 6d Pitch angle responses in control of a-hold and V-hold principles

图6e 两种操纵策略下的高度响应Fig. 6e Height responses in control of a-hold and V-hold principles

图7a 两种操纵策略下的侧滑角响应Fig. 7a β responses in control of a-hold and V-hold principles

图7b 两种操纵策略下的滚转加速度响应Fig. 7b p responses in control of a-hold and V-hold principles

图7c 两种操纵策略下的偏航加速度响应Fig. 7c r responses in control of a-hold and V-hold principles

图7d 两种操纵策略下的滚转角响应Fig. 7d Rolling angle responses in control of a-hold and V-hold principles

图7e 两种操纵策略下的偏航角响应Fig. 7e Yaw angle responses in control of a-hold and V-hold principles

图7f 两种操纵策略下的横向偏离运动距离响应Fig. 7f Yg responses in control of a-hold and V-hold principles
通过人-机-舰-环境仿真和运动学方程,可以得到两种策略下飞机着舰分布.“保速度”策略着舰分布如图8a所示,“保角”策略着舰分布如图8b所示.
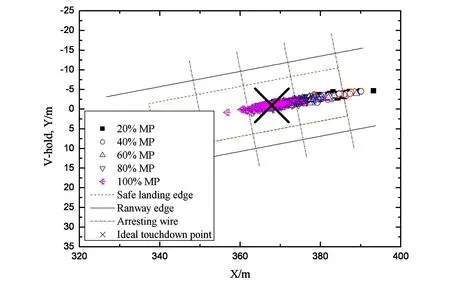
图8a 不同空重下“保速度”策略着舰点分布图Fig. 8a Touchdown points distribution of different weight in V-hold principles
由图8可见,采用“保速度”策略飞机着舰点“发散”,与理想着舰点纵向最大平均误差可达近17米,横向着舰误差平均也在2米左右,同时部分着舰点超出了安全着舰区域.采用“保角”策略飞机着舰点相对集中在第一根拦阻索和第四根拦阻索之间,与理想着舰点纵向最大平均误差不超过10米,横向最大着舰平均误差不超过1.8米,所有着舰点均在安全着舰区域内,可以实现着舰.进行100次蒙特卡洛仿真,进一步比较纵向和横向着舰误差如图9所示.详细比较不同着舰重量下着舰误差如表3所示.其中XTD是着舰点纵向坐标、YTD是着舰点横向坐标.
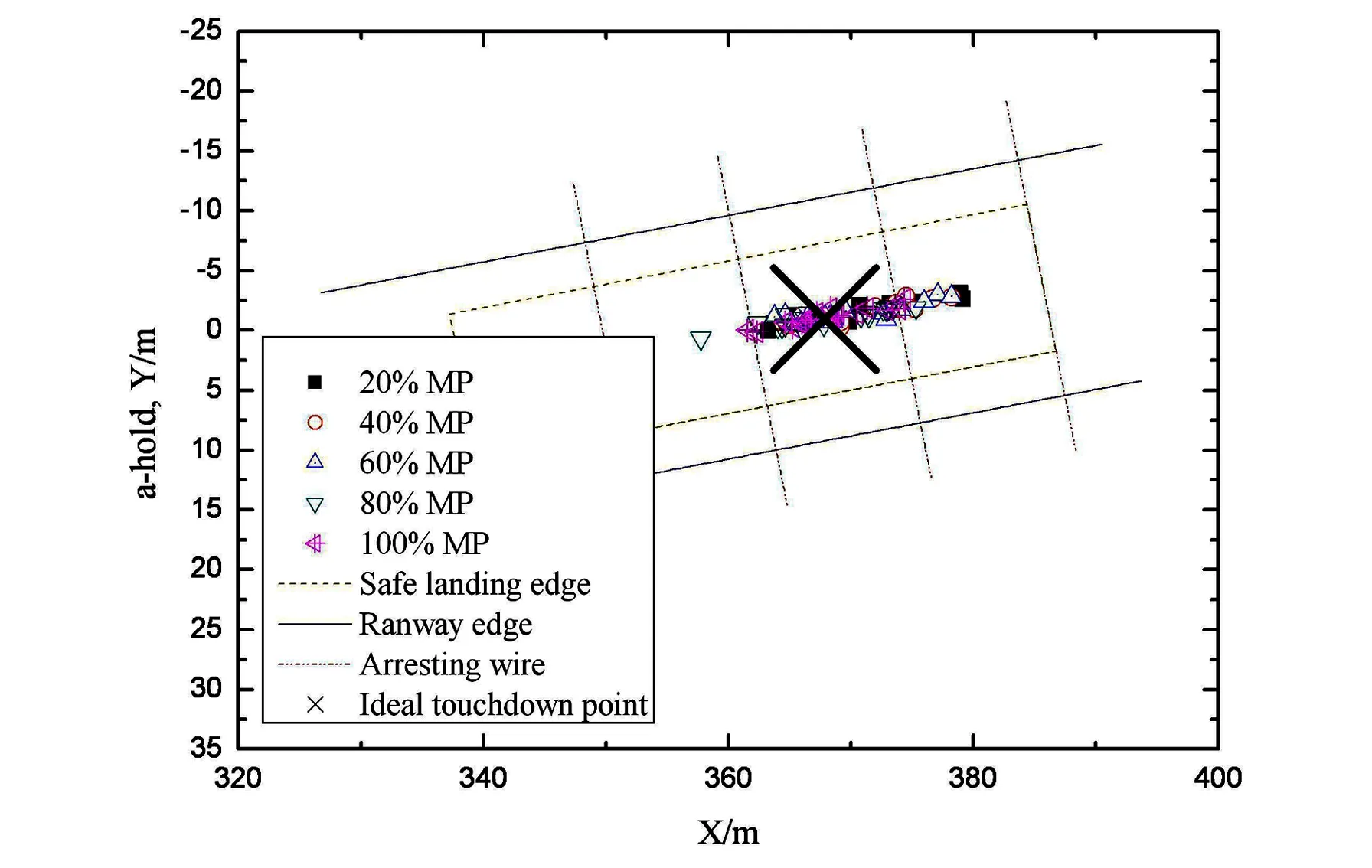
图8b 不同空重下“保角”策略着舰点分布图Fig. 8b Touchdown points distribution of different weight in a-hold principles

图9a 不同着舰重量下不同策略纵向着舰误差Fig. 9a RMS error of XTD with different recovery weights in two principles

图9b 不同着舰重量下不同策略横向着舰误差Fig. 9b RMS error of YTD with different recovery weights in two principles
由图9可见,采用“保角”策略,着舰点平均值更靠近误差零线,更接近理想着舰点,着舰精度高于“保速度”策略.由表3可见,在“保速度”策略下,着舰重量越小,平均着舰点偏离理想着舰点越远.当着舰重量发生变化时,“保速度”策略平均着舰点变化范围可达12米;而在“保角”策略下,平均着舰点变化范围仅为4米,不同重量下“保角”策略着舰点集中在-1.8~9.4m之间,而“保速度”策略着舰点集中在7.2~17m之间.因此对于不同着舰重量操纵问题,采用“保角”策略可以获得更稳定的着舰分布,着舰精度较高.

表3 不同着舰重量两种着舰策略误差比较Table 3 Comparison of RMS Error of touchdown points in different principles with different recovery weights
3.3 着舰策略分析
3.3.1 着舰分布分析
从前述着舰误差比较可以发现,在相同着舰重量下“保角”策略着舰分布略大于“保速度”策略;而不同着舰重量下,“保角”策略平均着舰点更为稳定.下面对上述现象进行分析.着舰点之所以分布在一定范围,其主要原因是,受随机大气扰动作用,飞机动态响应将在飞行员操纵下呈现一定随机性,因此可以从飞行员对飞机随机响应的抑制效果上,对着舰范围进行分析.由于着舰重量与基准状态相差越远,着舰误差越大,为分析效果更为明显,以20%着舰重量为例进行分析.进行100次蒙特卡洛仿真,比较飞机响应抑制效果如图10所示.由图10a可见,“保速度”策略对速度扰动抑制效果最好,在这一策略下,飞机的速度增量始终在零附近徘徊.而“保角”策略下飞机的速度扰动仅得到了一定抑制,但远未消除.同时可以发现,只要有人操纵,无论采用何种策略,其速度扰动抑制效果均优于无控飞机.图10b展示了两种策略下的迎角扰动及其抑制效果,由图可见,有人操纵下,迎角扰动反而增大.这是因为,无控飞机在舰尾流影响下自由运动,迎角扰动完全转化为飞机动态响应,因而迎角变化增量小;而有人操纵下,飞机在进行下滑轨迹跟踪过程中将以恒定“状态”进行下滑,不再对外界扰动做出自由响应,扰动气流直接作用于保持恒定姿态的机体,由此必然使迎角扰动增大,因此,飞机在飞行员操纵下迎角扰动更为明显.比较不同策略迎角扰动抑制效果,由图10b可见,相同着舰重量下,“保角”策略的迎角扰动抑制效果好于“保速度”策略,虽然二者迎角扰动均值相差不大,但“保角”策略扰动误差范围明显小于“保速度”策略,在“保角”策略下,迎角扰动最大为3.5度左右,而“保速度”策略下,迎角扰动最大可达6度左右.

图10a 不同策略下速度扰动抑制效果比较Fig. 10a Comparison of airspeed disturbance restraint in two principles

图10b 不同策略下迎角扰动抑制效果比较Fig. 10b Comparison of AOA disturbance restraint in two principles

图10c 不同策略下俯仰角扰动抑制效果比较Fig. 10c Comparison of θ disturbance restraint in two principles

图10d 不同策略下高度扰动抑制效果比较Fig. 10d Comparison of Height disturbance restraint in two principles
对于俯仰角扰动,由图10c可见,相同着舰重量下,“保角”策略扰动抑制效果优于“保速度”策略.对于高度扰动,如图10d所示,两种策略都对于高度扰动进行了抑制,并将眼部跟踪高度误差控制在零附近.综上,两种策略的扰动抑制效果各有优劣.因此,在恒定着舰重量下,“保角”策略着舰分布范围略大于“保速度”策略,是多种因素综合作用的结果,其主因是速度扰动引起.“保速度”策略下,虽然迎角扰动抑制效果较差,但其较好的速度扰动抑制能力,将使其着舰分布范围更小.
3.3.2 平均着舰点分析
在不同着舰重量下,“保角”策略着舰均值更稳定.着舰点均值可以等效认为是排除随机扰动因素的理想着舰点.而理想着舰轨迹是飞行员通过观察下滑光束操纵飞机加以实现的.即理想着舰点偏差主要由飞行员眼部跟踪误差和尾钩误差组成,图10d已经证明两种策略下的眼部跟踪效果差别不大.因此尾钩误差就成为不同重量着舰点差异的主要因素.而尾钩误差主要由飞行姿态角引起.现比较不同着舰重量、不同策略下着舰姿态角如图11所示.由图可见,“保速度”策略下,不同着舰重量的配平基准姿态角存在显著差异,而且其姿态角扰动随着飞行员操纵而增大,这将显著增加尾钩误差.而采用“保角”策略,首先确保了不同着舰重量下基准姿态角的一致,其次,在飞行员操纵下,迎角扰动得到了一定抑制,飞行员不仅进行了下滑光束跟踪,同时采用保持迎角不变操纵原则,对姿态角扰动进行了抑制,因此,不同着舰重量下“保角”策略平均着舰点更稳定,精度更高.

图11 不同策略下俯仰角姿态角误差比较Fig.11 Comparison of RMS error of θ in two principles
4 结论
为提高舰载机在不同着舰重量下着舰精度,对舰载机着舰下滑段飞行员操纵策略进行了研究,结果表明:
1)随空重增加,配平需用推力增加,配平速度增加、配平迎角增加.为避免满载返航失速,应以最大着舰重量配平状态作为操纵基准参考状态.飞机设计中应对最大着舰重量进行规定.
2)从着舰点分布看,不同着舰重量下,“保速度”策略着舰点“发散”,部分着舰点超出安全着舰范围.“保角”策略着舰点相对集中.在算例中“保角”策略着舰点集中在-1.8~9.4m之间,“保速度”策略着舰点集中在7.2~17m之间.因此,对于不同着舰重量,采用“保角”策略可以获得更稳定的着舰分布,着舰精度较高.
3)“保角”策略着舰精度高于“保速度”策略的原因在于,一是“保角”策略针对不同重量配平状态,采用了恒定的基准姿态角;二是“保角”策略不仅通过跟踪下滑光束保持了轨迹角,减小了高度误差,而且通过保持基准迎角不变减小了姿态角误差,进而减小了尾钩误差.因此“保角”策略着舰精度高于“保速度”策略,且更为稳定.
综上,在着舰下滑段,理论上建议飞行员采用“保角”策略操纵.但这一结论是基于A-4D型算例飞机得出的,因此为证明结论有效性仍需更为多样且全面的气动数据,对其进一步验证.
1Durand T S,Wasicko R J. Factors influencing glide path control in carrier landing.JournalofAircraft, 1971,4(2):146~158
2田瑾,赵廷弟. 舰载机着舰安全的多维状态空间分析. 北京航空航天大学学报, 2011,37(2):155~160 (Tian J, Zhao T D. Multi-dimensional state space model to aircraft-deck landing safety.JournalofBeijingUniversityofAeronauticsandAstronautics, 2011,37(2):155~160 (in Chinese))
3Bannett R J. Optimal control of the F-8C in a fully automatic carrier approach. AD-753010. 5285 Port Royal Road, Springfield, USA: National Technical Information Service, 1972
4 Nastasi R, Martorella P, Huff R, et al. Carrier landing simulation results of flight path controllers in manual and automatic approach∥American institute of aeronautics and astronautics. AlAA atmospheric flight mechanics conference. Gatlinburg, Tennessee: American Institute of Aeronautics and Astronautics, 2013:1~9
5陈宣仪,刘刚,洪冠新. 舰载机返航着舰的关键点和关键要素的分解与分析. 飞行力学, 2011,29(2):20~24 (Chen X Y, Liu G, Hong G X. Selection and analysis of key points and factors in carrier air-craft landing process.FlightDynamics, 2011,29(2):20~24 (in Chinese))
6Urnes J M, Hess R K. Development of the F/A-18A automatic carrier landing system.JournalofGuidanceControl&Dynamics, 2012,8(3):289~295
7Subrahmanyam M B. Hinfinity design of F/A-18A automatic carrier landing system.JournalofGuidanceControlandDynamics, 2012,17(1):187~191
8Craig S J, Ringland R F, Ashkenas I L. An analysis of navy approach power compensator problems.AerospaceSciencesMeeting, 2015,9(10):737~743
9张玉洁,杨一栋. 保持飞行迎角恒定的动力补偿系统性能分析. 飞行力学, 2006,24(4):30~33 (Zhang Y J, Yang Y D. Analysis of the approach power compensator system with constant angle of attack.FlightDynamics, 2006,24(4):30~33 (in Chinese))
10 王新华,杨一栋,朱华. 低动压着舰状态下飞机的操纵特性研究. 飞行力学, 2007,25(4):29~36 (Wang X H, Yang Y D, Zhu H. Research of handling characteristics of aircraft in low dynamic pressure situation.FlightDynamics, 2007,25(4):29~36 (in Chinese))
11 赵振宇,韩维. 飞机着舰轨迹稳定性及飞行员操纵策略研究. 兵工自动化, 2015,34(11):26~29 (Zhao Z Y, Han W. Research of flight path stability and pilot control strategy in carrier landing.OrdnanceIndustryAutomatic, 2015,34(11):26~29 (in Chinese))
12 赵振宇,韩维,陈俊锋. 飞行员着舰下滑轨迹跟踪操纵策略研究. 飞行力学, 2015,33(6):519~522 (Zhao Z Y, Han W, Chen J F. Research of pilot strategy to pursuit flight path in carrier landing.FlightDynamics, 2015,33(6):519~522 (in Chinese))
13 范晔,袁锁中,杨一栋. 着舰状态飞行员控制策略研究. 飞行力学, 2008,26(3):37~40 (Fan Y, Yuan S Z, Yang Y D. Research of pilot control strategy in carrier landing.FlightDynamics, 2008,26(3):37~40 (in Chinese))
14 屈香菊,崔海亮. 舰载机进舰任务中的驾驶员变策略控制模型. 北京航空航天大学学报, 2003,29(11):993~997 (Qu X J, Cui H L. Variable strategy pilot model of carrier landing approach.JournalofBeijingUniversityofAeronauticsandAstronautics, 2003,29(11):993~997 (in Chinese))
15 方振平,陈万春,张曙光. 航空飞行器飞行动力学. 北京:北京航空航天大学出版社,2005:288~289 (Fang Z P, Chen W C, Zhang S G. Aircraft flight dynamics. Beijing: Beihang University Press, 2005:288~289 (in Chinese))
16 Moorhouse D J, Woodcock R J. Background information and user guide for MIL-F-8785C specification flying qualities of piloted airplanes. AFWAL-TR-81-3109, 1982,7:188~194
17 刘嘉,向锦武,张颖等. 自适应飞机驾驶员最优控制模型研究及应用. 航空学报,2016,37(4):1127~1138 (Liu J, Xiang J W, Zhang Y, et al. Research and application of the adaptive optimal control pilot model .ActaAeronauticaetAstronauticaSinica, 2016,37(4):1127~1138 (in Chinses))
18 Gu J X. Flight Stability and Automatic Control. Second Edition. Beijing:National Defense and Industry Press,2008:435~444
猜你喜欢
小哥白尼(军事科学)(2021年7期)2021-11-20
军事文摘(2021年19期)2021-10-10
北京航空航天大学学报(2021年6期)2021-07-20
文苑(2020年6期)2020-06-22
意林·全彩Color(2019年4期)2019-05-11
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
科技传播(2014年4期)2014-12-02
筑路机械与施工机械化(2014年2期)2014-03-01
诗潮(2014年7期)2014-02-28
阅读与作文(英语高中版)(2013年8期)2013-08-20