
基于混沌理论的电梯分时控制系统的应用研究
2018-03-23 03:45刘丽
西安文理学院学报(自然科学版) 2018年2期
刘 丽
(安徽新华学院 信息工程学院,合肥 230088)
从20世纪中期开始,关于模型控制理论得到了快速发展,整体而言,在构建控制系统时,需要经过3个阶段,即模型构建、模型分析以及基于模型进行系统设计[1].然而,由于当前实际情况中,受控对象的复杂程度在日益增加,因此,在进行模型控制系统建立时,应当结合受控对象具有的复杂特征展开积极有效的模型构建,这也是当前应当重点研究的内容[2].而如果此时设计的模型太过简单,那么对于系统的动态特征难以进行充分的反映,此时在实践应用中的效果是相对有限的.其次,当前应用较为常见的两种方法,为系统辨别以及有机建模.不管采取的是何种方法,最终得到的结果都是为了实现对真实系统的有效逼近,而且在实际系统中会存在一些不确定性因素,会对系统鲁棒性产生影响[3].
文献[4]则提出了一种参数估计方法.但以上方法均未考虑实际物理系统中可能出现的电梯非线性控制问题.由于执行器的执行能力都是有限的,在电梯非线性控制中,具有一种非线性特征,会对整个控制系统的稳定性,以及其控制效果产生较大影响,此时对于可能发生的电梯非线性控制,将无法发挥其最大的控制能力[5].同时在电梯非线性控制后,作用在系统上的实际控制量此时并不简单的受到控制器数值的影响.因此,此时得出的模型参数辨识的输入输出就可能出现明显偏差,严重时会造成系统的不稳定[6].文献[7]虽设置了控制量的速率饱和,然而,对于这种饱和并未及时的进行处理,对于执行器的增值饱和问题也未进行有效的考虑.
本文针对电梯非线性控制问题,提出了面向非线性混沌理论的改进电梯分时控制方法,并证明了该控制方法的闭环稳定性.进一步通过仿真实验,得出了该方法在跟踪能力方面更优,而且对于初始值的敏感性也较低.本文执行器对于速率饱和以及位置饱和同时进行分析,而且也对此进行了优化处理.
1 电梯分时控制的电梯非线性控制优化
本节提出基于混沌理论的优化电梯分时控制系统,通过综合分析执行器的执行能力给出分时控制算法.
在辨识PJM参数时,采用如下计算方法:
(1)

进一步对y(k+1)进行滤波
(2)


(3)
λ>0代表权重因子,能够对控制变量的变化幅度进行分析.
关于执行器执行能力(4),设
(4)
则在k时刻控制量增量范围可表示为
(5)
联立式(7)和式(9),并做如下变换:
(6)
忽略常量G,其等价于求解:
(7)
J在当x取何值时能够达到最小值,此时对于上述极值问题,可以通过非线性递归二次方法对其进行求解.
定义H、K矩阵和x向量如下:
(8)
其中,x∈Rn×1是拉格朗日乘子.采用如下步骤迭代求改进解:
x←0
iter←1
itermax←20
∈←∈0
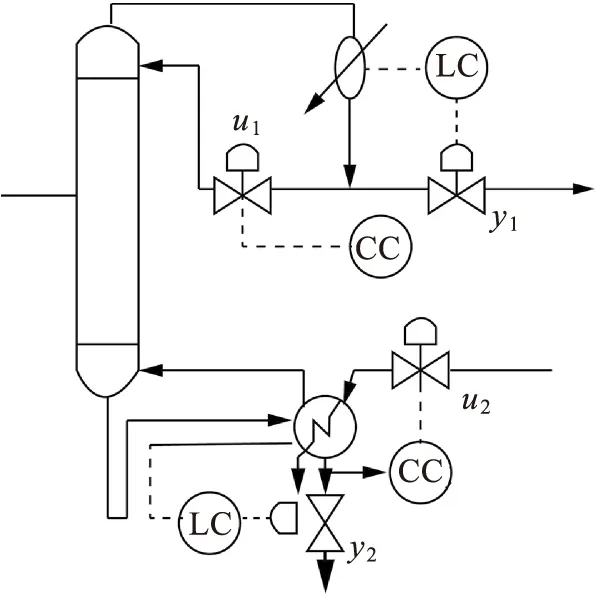
while(‖xiter-xiter-1‖<∈oriter {fori=1:n x(i)←max(0,ω) iter←iter+1 } } x=-E-1(F+MTx) (9) 其中,迭代次数itermax可变.从以上的计算过程中能够发现,在分时控制问题的求解中,等同于原来问题的对偶问题,此时最终解的获得可通过拉格朗日因子的逼近得到,而且整个过程中并不存在矩阵求逆运算.故此,所需的计算工作较小.当此时不等式的可行解为非空集合时,此时得到的算法具有较好的收敛性.而且能够得出,如果此时其中并不存在约束式(9),则此时在式(7)中能够得到最优解为x=-E-1F.利用式(13)能够得出,此时得到的最优解问题等同于添加了一个修正项到原来的问题约束中,此时不等式约束(9)是能够充分满足的. 图1 电梯控制系统 电梯被广泛应用于建筑业.但在电梯内可能产生的延迟问题,增加了控制律设计的难度,而通过电梯分时控制则能够实现对此类问题的有效分析.本文进行的仿真实验中,采用的是Wood/Berry电梯,如图1所示.u1表示其具有的回流速率(IB/min),u2代表电梯流量(IB/min),y1表示上部成份(mol% methanol),y2表示底层成份(mol% methanol).选择如下系统作为Wood/Berry电梯. 期望输出信号为 (10) (11) (12) (13) u(k)=u(k-1)+δsgn(Δu(k)), ‖Δu(k)‖>δ (14) 同时限定被控系统执行器执行能力为 (15) 结合上述研究基础,可对改进前后的算法进行仿真分析,得到结果如图2所示. 本文为了实现对控制算法前后的对比,对其关于初始参数的敏感度高低进行分析,设初始参数 再进行仿真后,结果如图3所示.假设此时执行能力不会受到限制,则此时通过电梯分时能够实现对信号的有效跟踪.结合图3的结果进行对比分析,能够得出,当产生电梯非线性控制之后,此时得到的改进前电梯分时控制是发生了显著静差.主要是由于此时在执行器中其中有一个是符合饱和状态的,另一个控制力却是处于未有效发挥的状态,如果初始参数存在摄动,那么此时经过改进之后的算法表现出了较为强烈的抖动,而且此时跟踪参考输入的能力也相对缺失,这就导致此时对于执行器的实际情况并未进行合理的考虑,使得此时在进行PJM参数校正时,产生量测误差,导致最终的净差值较大.对比之下,能够得出,本文所提出的改进之后的电梯分时控制算法对于执行器的执行能力并未实现充分的考虑.因此,能够实现跟踪参考输入,此时的算法性能是有效的. 图2 分时控制性能对比图 图3 改变初始参数后控制性能对比图 本文主要就在传统的电梯分时控制中,电梯非线性控制难以有效解决的问题展开了论述,并且就如何改进提出了改进算法.通过对混沌理论引入约束条件,使用非线性混沌理论方法进行数值求解,具有编程简单、计算量小的优点,而且对于闭合环境中该算法的性能进行了分析.结果表明算法具有较好的性能,而且计算量也较小.并且对于改进前后算法具有的性能优势进行了分析.仿真结果显示,本文方法具有较强的分时控制能力,对于初始参数依赖性较弱,能较好地解决电梯分时控制问题. [1] WU H X,HU J,XIE Y C.Characteristic model-based allcoefficient adaptive control method and its applications[J].IEEE Transactions on Systems,Man,and Cybernetics,Part C,2016,37(2):213-221. [2] HOU Z S.Highlight and perspective on model free adaptive control[J].Journal of Systems Science and Mathematical Sciences,2014,34(10):1182-1191. [3] VALENTINI G,WANG Z.From model-based control to data-driven control:survey,classification and perspective[J].Information Sciences,2013,235:3-35. [4] HOU Z S,JIN S T.A novel data-driven control approach for a class of discrete-time nonlinear systems[J].IEEE Transactions on Control Systems Technology,2011,19(6):1549-1558. [5] JIN S T,HOU Z S,CHI R H.A novel higher-order model-free adaptive control for a class of discrete-time SISO nonlinear systems[J].Journal of Dynamic Systems,Measurement,and Control,2016,135(4):044503. [6] KLUGE A,ZHU Y M.Controller-dynamic-linearization-based model free adaptive control for discrete-time nonlinear systems[J].IEEE Transactions on Industrial Informatics,2015,9(4):2301-2309. [7] XU D Z,JIANG B,SHI P.A novel model-free adaptive control design for multivariable industrial processes[J].IEEE Transactions on Industrial Electronics,2014,61(11):6391-6398.2 仿真实验




3 结论
猜你喜欢
制造技术与机床(2019年8期)2019-09-03
小学生学习指导(低年级)(2018年3期)2018-01-31
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2017年1期)2017-11-24
小学生时代·综合版(2016年7期)2016-05-14
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
红蜻蜓·低年级(2015年11期)2016-02-02
小说月刊(2015年4期)2015-04-18
