
DMC算法在CSTR温度控制中的应用
2018-03-26 04:23何美霞周箩鱼长江大学电子信息学院湖北荆州434023
长江大学学报(自科版) 2018年5期
何美霞,周箩鱼 (长江大学电子信息学院,湖北 荆州 434023)
连续搅拌反应釜(Continuous Stirring Tank Reactor,CSTR)是工业过程中广泛使用的一类反应器[1]。反应器温度及反应物浓度等对产品质量及生产安全有重大影响,因此对这些指标的控制是工业过程控制领域的研究热点。然而,由于CSTR具有强非线性的动态特性,传统的控制方法(如PID控制、比值控制)效果不尽人意,因此许多学者开始寻求更优的控制方法。李述清等[2]针对CSTR系统控制问题,设计了一种基于闭环增益成型算法的PID控制器,提高了PID控制器设计的简洁性和鲁棒性。刘士荣和俞金寿[3]采用神经模糊逆模控制与PID反馈控制相结合的复合控制策略,应用于CSTR的反应物浓度控制中。通过仿真证明了这类控制策略的有效性和实用性。刘松等[4]针对CSTR模型设计了具有高增益观测器的非线性鲁棒控制器(ONRC),提出一种简单的控制器的参数整定方法。仿真结果表明 ,该控制器对系统不确定性和干扰具有更好的抑制作用,且在模型参数摄动时具有更好的性能鲁棒性。李阳和聂宏[5]提出了一种非线性鲁棒模型BMI控制方法,通过CSTR的仿真试验说明了该算法的正确性和有效性。王宇红和杨璞[6]提出了一种基于PWA模型的控制策略,并将该策略应用到CSTR中,达到了期望的控制效果。下面,笔者总结了DMC算法原理,给出在具体运用该算法时的编程流程图,针对工业过程中广泛使用的CSTR系统,建立其非线性状态空间模型,并通过仿真试验研究DMC算法对非线性CSTR系统的反应釜内温度控制的有效性问题及系统处于理想状态、输出干扰及模型失配时的目标跟踪问题。
1 DMC算法流程图
DMC算法通过求取二次型性能指标的最优来确定未来的最优输入;计算出一组最优输入序列后仅将序列中的第1个输入应用于被控对象;到下一采样时刻,先检测被控对象的实际输出,并利用这一实时输出信息对预测值进行修正,再进行新的滚动优化。在具体运用DMC算法时可按照图1的流程编程实施,DMC算法原理的详细描述见文献[7],这里不在赘述。
2 非线性CSTR控制系统

图1 DMC算法编程流程图
一般来说,CSTR的主要部件包括釜体、釜盖、夹套、搅拌器、密封装置等。釜体顶部加有带动釜内搅拌器旋转的电动马达。反应釜内安装的温度传感器保证在线实时测量温度变化,采用传热速率高的铝制材料构造的釜壁,在热交换过程中可迅速调节釜内各点温度相等和稳定,即当釜内温度偏高时,夹套冷却液可迅速带走反应产生的热量;反之,温度偏低时,夹套热蒸汽提供反应所需的热量[8]。
由于CSTR具有较强的非线性,笔者采用DMC算法对其进行控制,在DMC控制器作用下的CSTR控制系统结构图如图2所示。在容积为V的CSTR中,进料以一定的浓度、温度和流量q进入反应器,在反应器中发生放热不可逆反应,CA为反应釜内反应物浓度,T为反应釜内温度,TC为冷却剂温度。取CSTR系统的控制变量为冷却剂温度TC,被控变量为反应釜内温度T。为便于对CSTR进行DMC控制仿真,需要离线一次性采集CSTR系统历史的冷却剂温度TCh和历史的反应釜内温度Th。在初始时刻k=0,根据期望目标Tss、Tch、Th,利用DMC控制器能得到时刻k=1的最优的控制输入Tc(k)。再对系统实际输出T(k)进行采集,并根据该数值与期望目标Tss的误差,滚动实时校正,得到下一时刻的最优控制输入。
为便于获取仿真所需的CSTR的单输入单输出(SISO)数学模型,取CSTR的一个稳态工作点[9]:
CA0=0.5mol/LT0=350KTC0=338K
令系统状态为x=[CA-CA0,T-T0]T,系统输入u=TC-TC0,系统输出y=T-T0,由反应物料平衡算式和能量守恒定律,求得非线性CSTR的状态空间模型如下:
(1)
式(1)的详细推导及其在Simulink中的实现见文献[10]。

图2 CSTR控制系统结构图
3 仿真试验与结果分析
3.1 数据计算及有效性研究
针对式(1)所描述的非线性CSTR系统,在初始时刻,给系统一个单位阶跃输入,可得到如图3所示的阶跃响应曲线。
从图3可以看出,系统在3.2s时已达到稳态。取模型截断时间为3.5s,采样时间为0.035s,则模型时域N=100。此时采集CSTR系统的输出得到的模型向量s的具体数值见表1。

dT= [0.2041,0.2887,0.2993,0.2738,0.2422,0.2115,0.1820,0.1536,0.1262,0.1000,0.0728,
0.0509,0.0281,0.0064,-0.0142,-0.0337,-0.0522,-0.0697,-0.0861,-0.1015]

表1 CSTR系统的模型向量
为研究DMC算法的有效性,当系统处于平衡状态时,加入DMC控制器;第8s开始,给系统加入输出干扰;第16s开始,又使系统处于模型失配,仿真观察系统是否能再次恢复平衡及恢复平衡所需要的时间,仿真结果如图4所示。从图4输出曲线可以看出,由于DMC控制器的引入,系统输出有较小的波动,1.1s后恢复了平衡;第8s开始,由于系统存在输出干扰,此时系统的输出波动增大,但在1.5s后恢复平衡;第16s开始系统遭遇模型失配,此时系统输出波动进一步增大,不过在2s时再次回到平衡。因此,当系统处于平衡态时,无论是遭遇输出干扰,还是模型失配的情况,DMC控制器都能有效地控制非线性CSTR系统,使之恢复平衡。
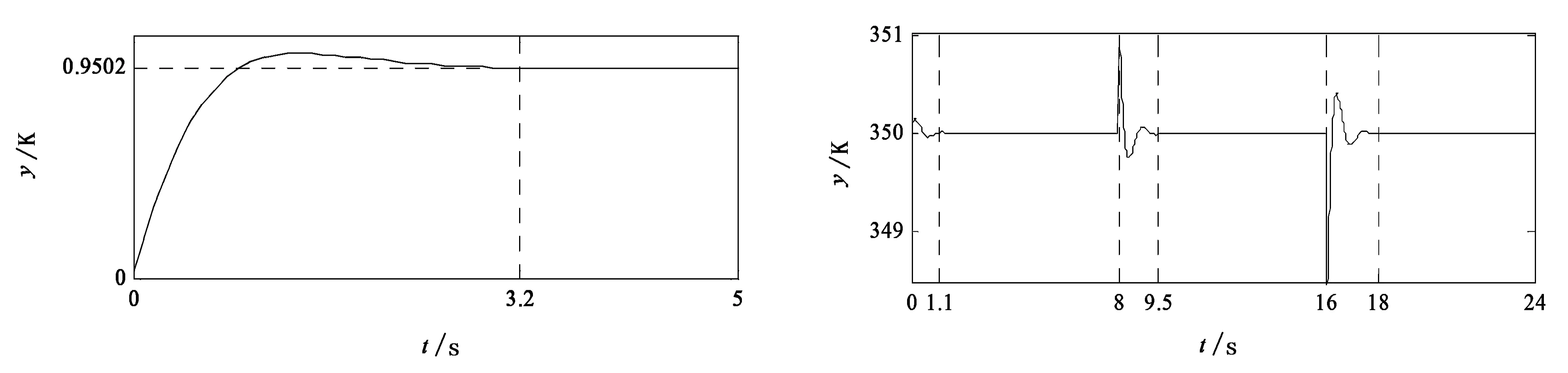
图3 CSTR系统的阶跃响应曲线 图4 平衡状态下的仿真图
3.2 目标跟踪研究
在上述基础上进一步研究DMC算法的目标跟踪能力。将仿真时间分为3个时段,每个时段设定不同的期望目标,具体为:①第1个时段k1,0~8s,yss=347K;②第2个时段k2,8~16s,yss=353K;③第3个时段k3,16~24s,yss=350K。考虑系统处于理想状态、输出干扰、模型失配3种情况下,仿真研究DMC算法的目标跟踪能力。
3.2.1理想状态
当系统处于理想状态时,仿真情况如图5所示。从图5可看出,每个时段的输入变化较平稳,实际输出的超调量均较小,调节时间短,能快速准确跟踪期望目标。
3.2.2输出干扰
在系统输出端引入 的干扰,仿真可得到如图6所示的曲线。

图5 理想状态下的输入输出曲线 图6 输出干扰下的输入输出曲线

图7 模型失配下的输入输出曲线
从图6可以看出,3个时段开始时输入、输出均有较大波动,实际输出最终能准确跟踪期望目标。
3.2.3模型失配
改变CSTR系统中进料流量的数值,令q=90L/min,使系统处于模型失配的状态,仿真结果如图7所示。
从图7可以看出,3个时段的输入、输出超调增大,实际输出能较快地跟踪期望目标。
3.3 结果分析
对比图5与图6可知,由于受到输出端1K的干扰影响,系统在k1、k3时段较理想情况的波动明显增大,且调节时间明显变长; 时段的波动较理想情况变缓,但起始时间超前了设定的时间(8s)。对比图5与图7可知,由于系统模型失配的影响,系统在k1、k2、k3的开始均有较大幅度的波动,其中k3时段的波段最大。表2为系统处于这3种情况时各项性能指标的具体数据。

表2 3种情况下的仿真数据
4 结语
非线性CSTR的反应器温度对产品质量及生产安全有着重大影响,但由于其强非线性的动态特性,传统的控制方法效果不尽人意。因此,笔者采用DMC算法对其进行控制。仿真结果表明,DMC算法不仅能对非线性CSTR系统的温度进行有效的控制,控制的稳态误差为零,而且在系统处于理想状态、输出干扰、模型失配情况下均能快速准确跟踪期望目标,具有较强的抗干扰能力和鲁棒性。该算法在非线性系统领域具有一定的应用前景。
[1]张健中.CSTR的Hammerstein模型辨识及预测控制[D].哈尔滨: 哈尔滨工业大学, 2010.
[2]李述清, 张胜修, 张煜东,等.连续搅拌反应釜过程的闭环增益成形PID控制器设计[J].计算机应用, 2011, 31(2): 483~484.
[3]刘士荣, 俞金寿.神经模糊逆模/PID复合控制在CSTR 中的应用[J].控制理论与应用, 2001, 18(5): 769~773.
[4]刘松, 李东海, 薛亚丽.连续搅拌反应釜系统的非线性鲁棒控制[J].化工学报, 2008, 59(2): 398~404.
[5]李阳, 聂宏.连续搅拌釜反应系统稳定性的BMI控制算法[J].计算机工程与应用, 2015, 51(23): 246~250.
[6]王宇红, 杨璞.一种基于PWA模型的控制策略在连续搅拌反应釜中的应用[J].化工学报, 2016, 67(3): 865~870.
[7]何美霞, 周箩鱼, 杨友平.DMC算法在电加热炉时滞系统中的仿真研究[J].长江大学学报(自科版), 2016, 13(22): 23~28.
[8]满红.CSTR过程的模型辨识及其非线性预测控制方法研究[D].大连:大连理工大学,2014.
[9]Ding B.Constrained robust model predictive control via parameter-dependent dynamic output feedback[J].Automatica, 2010, 46 (9): 1517~1523.
[10]何美霞, 杨友平.基于Simulink的连续搅拌反应釜的建模与仿真[J].长江大学学报(自科版), 2015, 12 (28): 21~25.
猜你喜欢
再生资源与循环经济(2022年9期)2022-11-20
电机与控制应用(2022年4期)2022-06-27
国际医学放射学杂志(2021年3期)2021-11-30
铜业工程(2021年1期)2021-04-23
天津化工(2021年3期)2021-01-08
基层中医药(2020年7期)2020-09-11
中国生殖健康(2019年8期)2019-01-07
雷达学报(2018年3期)2018-07-18
科学与财富(2018年33期)2018-01-02
仪表技术与传感器(2015年12期)2015-06-08
