
面向虚实融合的卧室箱体建模与布局算法*
2018-04-08 00:48王冬青贾金原
计算机与生活 2018年4期
王 超,王冬青,贾金原
同济大学 软件学院,上海 201804
1 引言
近年来,随着人们生活水平的逐渐提高,以及计算机图形学技术的大力发展,利用计算机高度模拟室内家居DIY布局设计,为用户提供室内装潢预体验已经成为一种潮流。采用虚拟现实的理念对房间和室内家居进行图形建模,将室内家居进行数字化和可视化的重要性不言而喻。
而随着“互联网+”的发展,以及信息通信技术和互联网平台的不断推动,互联网与家居DIY布局设计行业深度融合,基于虚拟现实理念实现的在线室内家居DIY布局设计平台也应运而生1)http://www.homestyler.com;http://www.kujiale.com/。。借助于新的设计平台提供的室内模型和家具模型,让DIY家居布局设计效率大幅提高,再加上X3D、Unity3D、WebGL等层出不穷的网页3D技术,使得网页三维展示的瓶颈效应骤然下降。网页在线室内家居DIY设计平台能让用户免于庞大设计软件的安装,比较轻松地实现室内家居布局设计,在三维虚拟环境中获得室内装潢预体验。
然而科研永无止境,当前许多家居设计平台仍然面临以下问题。
(1)房间模型真实性较差。虽然当前家居平台采用三维家居模型能反映室内的家具,但对用户各自真实的室内场景仅限于统一的建模,不能反映用户自身室内场景的特点。
(2)家居布局设计人工干预量大。当前许多家居设计平台还是停留在用户简单地拖放家居等功能上,不能自动为用户计算摆放布局,使得用户的设计工作量较大。
除此之外,即便将室内场景建模的工作交给用户DIY完成,以反映室内真实情况,但对用户操作要求太高,如何提供一个操作便捷简单的建模方式也是不可回避的问题。同时,如何在3D环境中,在运算量可以接受的范围内,尤其是手机、平板这种小型移动端承受的计算范围内,实现家居的自动布局,还有待进一步研究。
2 相关工作
2.1 虚实融合
采用虚拟现实技术模拟室内家居布局设计同时需要室内场景模型和家具模型,家具模型由于其自身的共性,可以由家具厂商或家居设计平台统一定制,但用户的室内场景由于各有特点,统一制定不能真实反映室内的情况,需要熟悉自己室内特点的用户自行建模。
模拟室内家居布局设计目前流行三种方式:(1)三维室内模型和三维家具模型;(2)二维室内背景图像和二维家具图像;(3)二维室内背景图和三维家具模型。这三种技术方式各有特点,具体对比见表1。
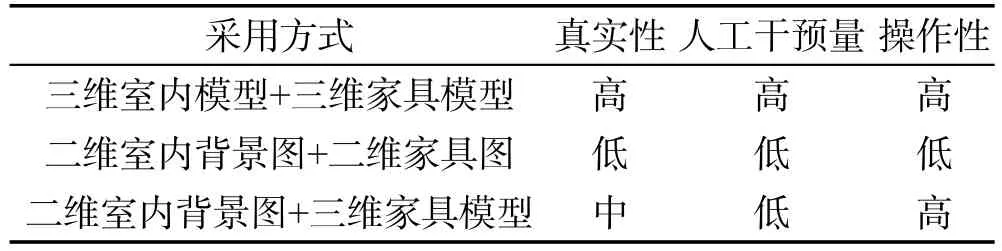
Table 1 Comparison of three ways表1 三种方式对比
三维室内模型和三维家具模型能带来很高的易用性和真实性,但由于室内场景三维模型要反映用户各自的真实情况而没有统一的建模,使得用户必须自行进行室内场景的三维建模,人工干预量较大。
二维室内背景图像和二维家具图像,不需要用户进行室内场景三维建模,拍摄一张室内照片即可,干预量较小,但由于家具和室内场景都是二维图像,缺少大量必要的视觉信息,使得视觉上缺乏真实性,同时也限制了用户操作性。
对于二维室内背景图像和三维家具模型,首先室内家居布局设计中,家具的操作空间大于已经定型的室内场景,而家具的三维模型提供的完整视觉信息和效果足够满足家具的操作空间。因此,采用二维室内背景图像建立的室内场景模型,虽然使得室内场景的视觉信息减少,但室内场景已经设计定型,操作空间相对较小,缺少的视觉信息均不影响真实性和操作性,反而免除了用户自行进行室内场景建模的工作量。本文采用这种方式。
由于二维室内背景图像取自于用户拍摄的真实室内照片,而三维家具模型是利用计算机图形技术虚拟制定,本文通过虚实融合的方式将两者结合,对二维真实室内背景图像进行一定的计算,合成新视觉图像以生成逼真的三维虚拟环境,实现二维图像到三维环境的过渡,使其与三维家具模型兼容并最终完成家具自动布局。
2.2 基于图像的渲染技术
基于图像的渲染技术(image-based rendering,IBR)是实现虚拟现实方式的一种,是输入一组真实场景的图像,按照透视原理处理后合成新视点图像,以实现二维室内背景图像到三维箱体模型的过渡。
IBR技术中,画中游(tour into picture,TIP)技术颇受欢迎,文献[1]对此提出了一套使用TIP进行箱体建模的方法,通过对图像灭点检测和墙线识别的方式进行图片理解,根据室内二维图片建立箱体模型。灭点检测是IBR技术的核心环节,文献[2]针对单目图像序列的标定提出了一种新的灭点检测算法,并结合高斯域上的灭点提取,提出了基于概率占用域的多目标跟踪的新理念,有一定的理论价值。文献[3]针对人工环境,提出了探测水平灭点和天花板灭点的新方法,创造性地先利用正交性去除异常点产生灭点候选集,再结合全局图像上下文和深层卷积网络提取的方法约束正在考虑的灭点候选集。文献[4]基于单张图像,根据室内墙线的标识,提出了相对深度的概念和基于相对深度计算的TIP技术,提出了模型到平面的距离,并在单灭点的场景中建立蜘蛛网格以提取坐标信息,由此进行建模。
除此之外,文献[5]提出了一种新的全景漫游建模方案,同样使用一种新的类蜘蛛网建模方案,通过重建球面全景图的场景三维模型来恢复场景的深度信息,以提供更好的漫游体验。文献[6]在虚拟柱面全景模型及相关技术的基础上,设计了一种增强图像匹配效果、消除黑洞现象的建模方法。该方法利用基于特征线段的匹配算法对图像进行匹配,然后用渐入渐出的方法进行平滑无缝拼接,再用反投影算法生成全景图像,正投影算法生成各视线方向的视图,最终在浏览器中实现柱面全景图像的漫游。
基于球面全景图和柱面全景图的方法需要的前期拍摄工作相对于普通二维图片更加复杂,不符合操作轻量化的要求。因此本文将采用单张二维室内图片的方式进行箱体建模。
2.3 室内家居自动布局
家居自动布局是利用计算机图形学技术,通过对室内场景和家具进行三维建模,在建模后的室内场景运用自动布局算法,确定家具模型在室内场景中的位置,进而模拟真实室内场景中的家居布局情况,最终得到反映用户布局需求的室内虚拟场景。家居自动布局利用计算机在视觉上模拟场景布局,有效减少人工布局设计工作量,提高工作效率。
目前家居自动布局算法受到了大量学者的关注[7-18]。主要有两种思路,即基于案例学习的布局方法和基于现代优化算法的布局方法。
(1)基于案例学习的布局方法[7-11]。该方法对大规模场景布局进行学习和训练,然后将训练结果用于待布局的家居场景中。例如:文献[7]对大规模场景数据库的布局结果进行学习,同时将案例学习生成的多种布局结果加入到数据库中,进一步丰富场景数据库。文献[9]将存储在语义数据库中的先验信息和用户偏好进行优化,并建立对应的基因表达式,提出了采用交互式方式进行计算的自动优化方法。文献[10]为了在复杂的室内场景中自动生成合理的家居布局,提出了一种基于数据驱动的室内空间布局计算方法。结合已合理布置的室内场景案例,首先将布局信息提取为先验信息,然后对布局约束模型进行训练,并将布局约束模型与硬布局约束相结合,构造了一个描述室内功能区布局合理性的能量函数,最后通过随机优化对能量函数进行求解。文献[11]提出了一种用于计算机图形应用的建筑物布局自动生成方法,将真实建筑的布局数据化,并训练成贝叶斯网络以合成一个布局体系结构,再通过随机优化的方式得到布局后的平面图,这样的思想也可以迁移应用到室内的家居布局中。
基于案例学习的布局算法需要事先在数据库中准备大量案例,对服务器的重量级存储是一个考验。同时,布局计算的时候对案例的检索也需要花费巨大的开销。
(2)基于现代优化算法的布局方法[12-14]。该方法使用量化函数描述家居布局合理程度,通过对该函数最优求解从而确定布局方案。例如:文献[12]从合理布局中抽取出层次和空间关系等布局特征,结合访问性和可视性等特征,为布局赋予代价函数以衡量布局结果的优劣,并通过模拟退火算法对函数进行最优求解。文献[13]提出了一个交互式家居布局系统,采用硬件加速蒙特卡洛采样器快速采样密度函数和布局准则结合的方式,为用户产生布局建议。文献[14]提出了基于距离场能量分布函数的布局算法,该算法通过在基于地面能量分布函数的距离场中,搜索能量最大的位置,以此为依据进行家居布局。
此外,文献[15]将家居之间位置上的约束关系作为家居自动布局的出发点,将家居彼此的约束关系用层次树的方式加以结构化组织,再把粒子群优化算法应用在层次树中,避免了约束冲突带来的局部最优,提高了算法的准确性,加快了算法的收敛速度,实现了实时最优布局。至于对约束关系的处理,文献[16]针对物体在三维环境中的运动轨迹,引入了一个新的约束系统来进行相关的限制。对运动轨迹的限制也可以应用到对最终位置的限制上,使得家居约束关系更直观。
文献[17]提出了一种称为墙网格结构的新型分析结构,将3D模型的位置和类别结合起来。通过对位置和类别关系的归纳过程对3D模型进行位置检索,以最终自动合成出一套具有语义有效性和布局良好性的室内场景。至于语义描述和自动布局的对应,文献[18]提到的wordseye系统可以将文本描述自动转换为其代表的三维场景,用语言分析和一定的描述技术,使得抽象通用的布局概念和策略具有更直观的描述性。
约束系统和分析结构固然有其自身的优点,但约束系统与分析结构的设计需要大量的人工经验,缺乏一定灵活性和兼容性,稍有不慎会带来算法的收敛问题。
总体来说,对应于上述思路的各种算法在具体实现中,还存在诸多问题,例如布局过程中人工干涉量较高,布局算法运行时间较长等。
2.4 本文工作的主要贡献
针对家居布局前,室内场景模型建立操作复杂,需要较大人工干预的问题,本文采用了TIP技术,根据用户拍摄的单张室内场景图片以及标定的墙线,自动生成三维室内场景箱体模型,完成二维图像到三维空间的过渡,减去了用户大量手工构建室内墙壁、地板、窗户等构件的工作量。
同时,在室内箱体模型中,引入了基于地面能量分布的放置场轻量级智能算法,通过轻量级算法,在较快时间内为用户进行自动布局,使得用户免于大量的家具模型拖拽、旋转等操作。
本文贡献在于自动布局算法,并在此基础上,通过自动漫游规划进行了算法上的应用创新,结合发展成熟的TIP箱体建模技术进行了组合创新,在虚实融合的箱体中实现自动布局。
将虚实融合理念用于家居设计中,结合TIP箱体模型和室内布局算法是本文的核心,为了更简洁又不失一般性地说明问题,本文采用最具有代表性的卧室布局案例进行展开说明。
3 技术路线
本文首先根据单张卧室图片进行箱体建模,然后加入三维家具模型,打下虚实融合的基础,再应用基于能量分布函数的自动布局算法,完成箱体中的家居自动布局。
3.1 基于TIP技术的箱体重建
在获得用户拍摄的卧室图像后,首先对墙线进行标识,并采用贴片的方式建立三维箱体模型;然后,对于原始图片中缺失的图片映射信息,通过智能推算的方式进行补缺,实现箱体模型的完整性;接着,根据标识的墙线计算灭点,并结合假定的室内场景高度获取箱体模型的深度,从而获取在世界坐标中的三维箱体模型的尺寸;最后,如果原始室内场景图片中存在家具,则在箱体的三维坐标中,对原始存在的家具信息也进行标识,为后续参与的布局做准备。
3.2 基于地面能量分布的放置场布局
在获得卧室的箱体模型后,同文献[14]一样首先根据门窗位置对地面的能量分布进行初始化;然后按文献[15]类似的方式,根据卧室家具功能进行主次关系的指定,并由此建立层次关系图,通过对关系图的广度优先搜索,形成家具的布局顺序;最后根据布局顺序依次确定家具各自的位置并动态引起相应的能量变化,为后续待布局的家具做准备。在全部家具位置得以确定后,再根据最后的能量分布规划箱体漫游行为。
3.3 整体技术路线
综上所述:本文整体技术路线图如图1所示。

Fig.1 Technology roadmap图1 整体技术路线图
4 箱体模型卧室场景建模
用户在建立室内场景模型时,若采用家居DIY设计平台提供的现存卧室场景模型,干预量小,但真实度太低,只能反映是一个卧室,而不能反映是用户自己的卧室。若将卧室建模工作,交给用户自己完成,用户可以根据自己熟悉的卧室特点建立非常真实的室内场景模型,但手工操作量太多,干预量大。而TIP技术在本文中的应用正是两者劣势的规避,两者强势的结合(如图2)。
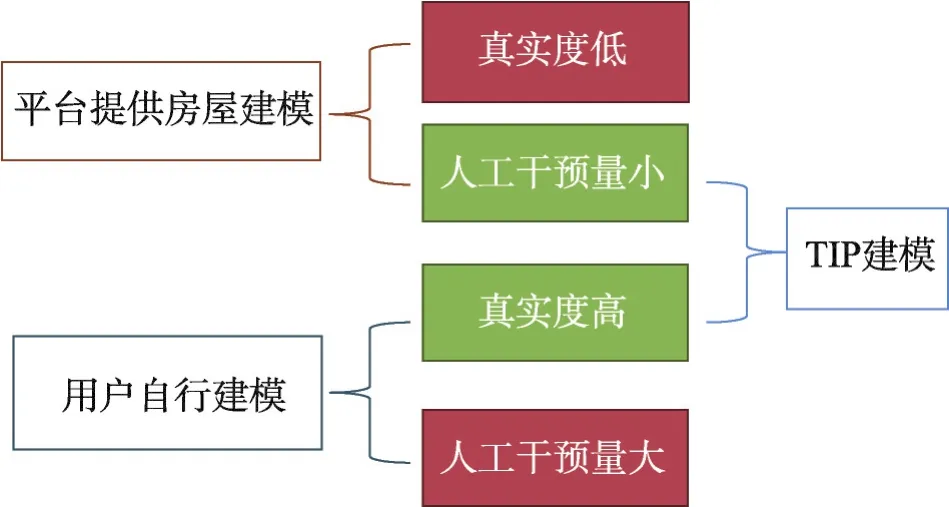
Fig.2 Advantage of modeling by using TIP图2 TIP建模的优势
4.1 箱体模型初始建立
从工程开发和用户体验设计的角度讲,对拍摄的卧室图片,采用文献[1]识别和手工描绘结合的方式标识墙线,使得用户在拍照和墙线自动识别的基础上,只需手工略微调整即可弥补自动识别的精度问题,人工干预量小。
根据二维卧室照片重建三维室内箱体模型的过程包括两步:
(1)根据墙线分片。
(2)分片贴在初始的箱体模型上。
根据标识的墙线,可以将原始的图片进行切割,形成5个面的切片,并分别贴在初始箱体模型的5个面上形成初始箱体模型,如图3所示。
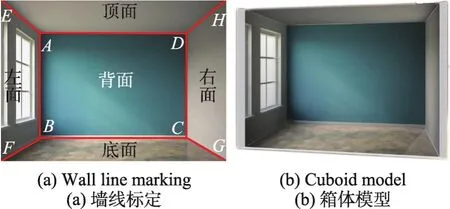
Fig.3 Initial cuboid model of indoor scene图3 室内场景初始箱体模型
这种利用图形学以使用少量信息生成新图像并粗略恢复场景的方式,避开了复杂的几何问题,用简单、直接的方式建立图像和箱体模型之间的联系,让二维卧室照片完成三维箱体模型的过渡,为虚实融合打下基础。
4.2 箱体模型切片信息补缺
从图3(a)可以看出,4条墙线的端点E、F、G、H分别与图片的4个顶点重合,使得比如为地面贴图的平面图形BFGC刚好为梯形,是最理想的切割分片的情况,但实际操作中,用户拍得不一定很精确理想,通常会出现图4的情况。

Fig.4 Non-ideal case for wall line marking图4 非理想情况墙线标识
可以看出,作为箱体地面贴图的平面图形BFB′C′GC不是标准梯形,是多出了两条边的六边形。这样因为缺少颜色数据的映射,建立的箱体模型会在地面出现信息的缺失,如图5所示。

Fig.5 Information missing region cuboid model图5 箱体模型信息缺失区域
若将图4中的CG边向下延长,与B′C′的右延线交于G′点,则构成的三角形GC′G′分别对应了图5中的信息缺失区域,如图6所示。
针对该种情况,本文采用智能算法,自动推算信息缺失区域里的像素信息,实现色彩上的平滑过渡。这里以缺失区域GC′G′举例说明。
对图7,设color(G)、color(C′)、color(G′)分别为缺失区域三角形3个顶点的颜色值,color(x)为缺失区域内待推算的点x的颜色值。x′为G′x与GC′的交点,其颜色由color(x′)表示,则可以通过以下公式进行计算:

其中u、v为上述公式的两个参数,取值0到1。而G′在地面上,本身属于缺失区域的点,其color(G′)可以用邻面墙壁的顶点代替。从图4中可以看出,邻面墙壁的顶点即为G点,因此这里可以用color(G)代替color(G′)。
遍历缺失区域内待推算点x并按式(1)进行颜色的智能推算,可完成箱体模型信息补缺。
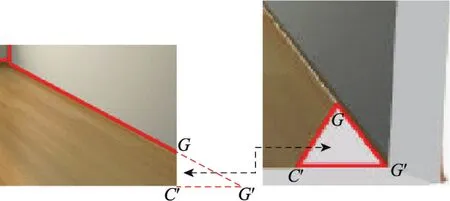
Fig.6 Information missing region图6 信息缺失区域

Fig.7 Fixing information missing regionGCG′图7 缺失区域GCG′补缺
4.3 获取箱体模型三维信息
将二维图像转换为三维箱体模型,还需要获知箱体的三维尺寸,由于拍照使用的相机参数和性能各有不同,根据照片还原室内场景的精确尺寸,难度太大,计算也复杂。这里采用基于深度[1-4]的方式进行粗略计算。
首先,从平面角度看,墙线在平面上延伸会交于一点,从三维立体的视觉看,墙线会向内交于一点,这样的点称为灭点,如图8所示。

Fig.8 Vanishing point图8 灭点
模型的高宽可由图片的高宽信息表示,即:

对于箱体的深度depth(box),需要结合三维视觉的信息进行确定。如图8(b),三维空间中的墙线将交于P点,而二维视觉的灭点V正是P点在平面ABCD(箱体背面)上的投影,而VU的长度正是箱体模型的深度。将平面CBFG沿着直线AB平移,使得其包含直线VU,如图9所示。
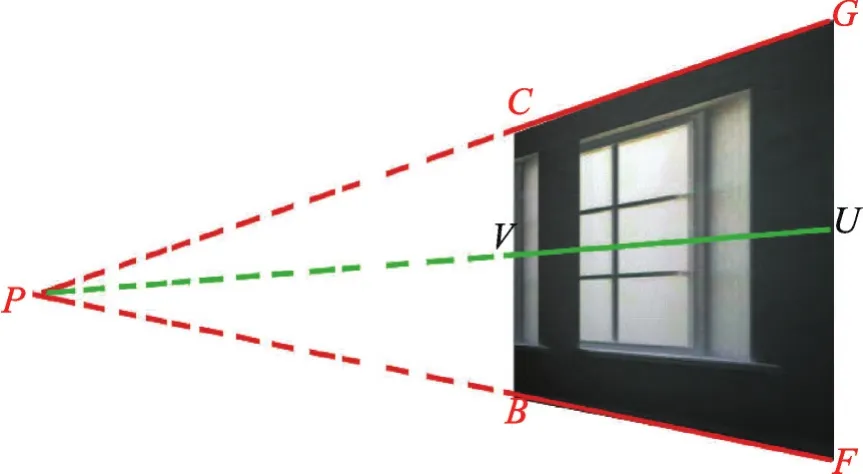
Fig.9 Fetching depth of cuboid图9 箱体深度获取
根据相似三角形原理以及文献[1]的方法,可以得出以下比例线段公式:

由此可以解得:

len(VU)就是箱体的深度depth(cuboid)。
这样方式计算出的初步深度只能反映房间内墙到拍摄者的距离,房间原始真实的深度需要用户稍加调整。
5 基于动态能量分布的放置场布局
本文在距离场思想上[14],提出了放置场的概念,将地面看作一个能量分布场。当确定了k个家具摆放位置后,地面每一位置(x,y)对应一个能量值家具摆放位置合理程度通过其占据区域Areafur里点位的能量和进行量化。
但和距离场相比,在家具布局顺序、地面能量分布计算方式以及布局过程中地面能量分布变化三方面做了相关的改进。
5.1 家具布局顺序规则
当前布局算法之所以会有计算不收敛或计算时间过长的潜在可能,是因为无序导致了冗余繁琐的搜索工作。因此本文同距离场思想[14]一样,是按照一定的排序顺序sorted_furnitures,利用贪心求解的思想,分次搜索各个家具能量和最大的位置。但在放置场中,家具布局顺序不单是根据家具高度和占地面积,而是根据人体工程学理论,以及布局目标房间的种类和家具主从关系,从而确定布局顺序。
以卧室为例,家具布局顺序规则为:(1)确定主要家具位置。主要家具布局确定后,再去确定从属家具。(2)针对同一层次从属家具,优先布局贴墙放置的家具。(3)针对若干个贴墙家具,优先布局与床有特定关系的家具。如床头柜与电视,都和床之间具有特定关系,必须分别在床的两侧和相对的位置。此外,优先布局有从属家具的家具,最后才考虑家具尺寸的因素。
例如:待布局的卧室里有若干个地面家具等待位置确定。既然是卧室,床是主要家具,其他家具为从属家具,椅子是写字台和梳妆台的从属家具,如图10所示的主从结构。对主从结构进行广度优先搜索可以得出一个序列:床→床头柜→电视→书桌→衣柜→梳妆台→椅子。
5.2 初始放置场地面能量分布函数
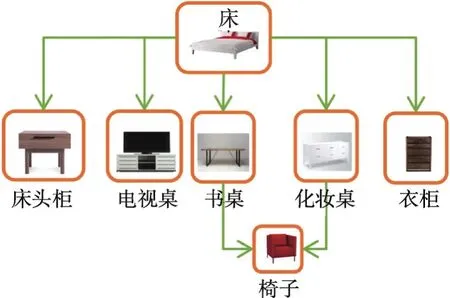
Fig.10 Master-slave structure of furniture in bedroom图10 卧室家具主从结构
文献[14]提出的能量值是单纯由位置(x,y)到门窗和中心距离带权均值Dmean(x,y)决定,本文在此基础上,引入了各个距离相差程度因子,即距离相差越小,能量值越高。距离相差程度由Dvar(x,y)表示,计算方式和数理统计中均方差类似。最初的家具个数为0,位置(x,y)的能量用以下公式加以量化:

这里Dmean(x,y)和Dvar(x,y)的计算公式为:

其中,d1、d2、d3分别表示点到门、地面中心、窗的距离;w1、w2、w3表示计算3个距离各自的权重,根据大量实验和调整,本文分别设置为0.1、0.3、0.6,计算出的地面能量分布如图11所示。
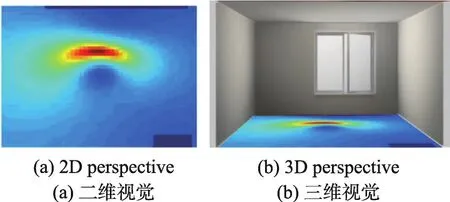
Fig.11 Initial ground energy distribution图11 初始地面能量分布
地面能量分布最高的地方即为图中红色最亮的地方,离门窗和中心有一段合理的距离,后期的布局中,也更好地满足和其他家具的位置关系,能很好地符合人体工程学理念和人为经验的布局规则,如图12所示。
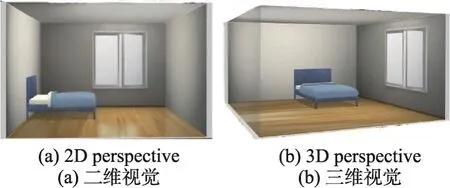
Fig.12 Bed is placed at reasonable location图12 床布局在合理位置
5.3 地面能量动态变化
文献[14]提出的基于距离场布局方法中,当一个家具确定位置后,单是将其占据区域Areafur里的点位能量值设为0,以不让其他家具与其发生碰撞。
本文提出的放置场布局方法中,还需要考虑其引起的地面能量分布的动态变化,进而使后续家具布局位置能更好得到反映。引起的地面能量分布变化主要包含如下3类:
(1)能量分布通用变化;
(2)能量分布特殊变化;
(3)能量分布附加变化。
其中,能量通用变化和特殊变化适用于所有待布局的家具,两者间的不同在于能量更新方式不同。而附加变化是针对某一类家具,如在床的位置确定后,附加变化在床的正对面附加一层能量分布,该层能量分布只适用于床前的电视桌。
特殊变化和附加变化没有通用公式,这是因为这两种变化的产生是由特定家具引起的。例如:当床的位置确定后,接下来通常是需要有两个家具位于床头两端以满足对称的几何特性。因此,在该情况下,地面上(x,y)位置的能量值计算如下:

通用变化的能量计算方式和初始时的计算方式类似,也用式(5)的计算方式,区别在于计算Dmean(x,y)和Dvar(x,y)时,除了考虑门窗和地面中心外,还要考虑已经布置好的家具,同时采用单位权值,因此地面上(x,y)位置的Dmean(x,y)、Dvar(x,y)计算修改如下:

Fig.13 Special energy change caused by bed图13 床产生的特殊能量变化
这里d1、d2、d3到dk+3表示到门、地面中心、窗以及当前存在的k个家具的距离。
比如当床头柜借助特殊能量变化布置在了床头两端,以及电视桌借助附加能量变化布置在了床对面,将一并引发通用能量变化,按上述公式计算后,能量如图14所示。
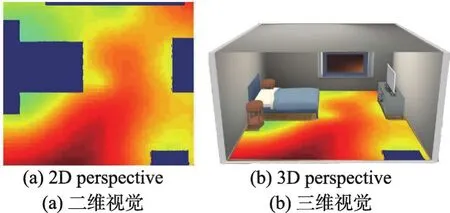
Fig.14 General energy change图14 通用能量变化
可以看出,能量开始往左边集中,那里正是适合放置其他比如桌子、平柜的地方。
综上所述,第i个家具fur的摆放位置的求解可以按以下形式表述。

按先前确定的布局顺序,依次为家具在能量分布场中搜索占据能量最大的位置,并在位置确定后动态更新地面能量的变化,为后续家具的位置搜索做准备,直到布局完成。
6 漫游向量场的生成
在所有家具位置确定后,使得地面的能量分布如图14所示,而如何根据地面的能量分布确定漫游区域以及区域上各个位置的视觉朝向是以下要解决的问题。
6.1 自动漫游区域生成
地面能量高低量化了家具位置的合理度,将在箱体模型中漫游的人看作是特殊的家具,是可以不用贴墙放置且可以在不同时刻处于不同位置的家具。因此人在漫游过程中所处的位置的合理程度也可以用地面的能量加以量化。漫游区域能量越高越好(如图15圈定范围)。
此外对着开口方向,逐行扫描能量最高的点再拟合为一条漫游曲线(图15绿色标记),可以此作为漫游区域代表路径,并将视觉朝向初始化为从开口正视箱体内墙的方向。如图15所示。

Fig.15 Best area for traveling图15 最佳漫游区域
6.2 自动漫游区域位置视觉朝向计算
在漫游区域确定后,接下来需要为区域上每一个位置确定朝向,这主要考虑两个因素。
(1)最多家具包含在当前朝向视觉范围内。
(2)箱体缺少的墙面不进入视觉范围。
人有一定的焦点视觉角度,让更多家具包含在当前朝向的焦点视觉范围内会带来好的漫游体验,针对该问题考虑如下:
以漫游区域代表路径上的一个位置O为例,如图16所示,方向OC决定当前焦点视野范围为∠AOB;然后将O与n件家具中心位置Fi连线,得到n条向量OFi,此时需要寻找一个OC使得其决定的∠AOB能包含最多的OFi。
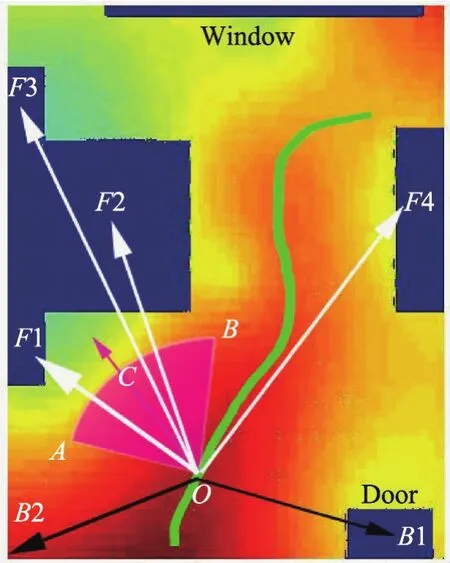
Fig.16 Vision orientation in routing area图16 漫游区域视觉朝向
设人的焦点视野范围为 2θ,即 ∠AOC=∠COB=θ,∠AOB=2θ;通过对向量OC的搜索,使得以下函数值达到最大。

其中angle用于计算两个向量的夹角。
OC方向决定的∠AOB范围包含了F1、F2、F3 3个家具,可作为该点的朝向。
对于在位置O对OC的搜索结果,有可能发生开口处的缺失墙面出现在视野中的情况,这是因为位置O和开口墙的左墙角B2的向量OB2被当前视觉范围∠AOB所包含,所以在对OC搜索过程中,要防止以下两个情况:
(1)∠AOB不能包含向量OB2或OB1。
(2)∠AOB不能包含于范围∠B2OB1。
故在对式(11)求解最大值时要加入两个约束,得到以下模型:

可以在漫游路径上对每个位置O,在范围[-π,π]内对决策变量OC进行搜索,以确定带有最佳视觉方向的漫游路径如图17所示。
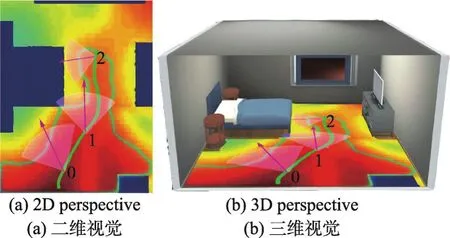
Fig.17 Routing area with vision orientation图17 带视觉朝向的漫游区域
对漫游区域内其他位置的朝向搜索,也可以采用这样的方式。
7 实验结果
本文使用VS2010与Web STORM实现布局逻辑,借助同济大学smart3D团队开发的在线家居平台(http://smart3d.tongji.edu.cn/vrfusion),将箱体建模的实验集成其中,利用其中的3D家具模型进行布局算法的实验。实验计算机为普通惠普PC,处理器为Intel®CoreTMi5-5200U CPU@2.2 GHz,内存4 GB,操作系统为Windows10 64 bit,浏览器为Chrome,采用的技术为WEBGL。
基于同济大学smart3D团队开发的在线家居平台,选择一些卧室图片,用以建立箱体模型。并将三维家具模型拖入箱体场景中,应用本文提出的自动布局算法得到自动布局结果,并和真实布局案例进行对比以验证算法的准确性。
由表2可知,根据原始二维图片构建的三维箱体模型,在尺寸和图像上面均能很精确地进行模拟。而作为对比的真实案例来自于真实平面布局设计图(或真实卧室照片)2)http://www.xmhouse.com;http://www.fang.com;http://www.lianjia.com;http://www.nipic.com/。,可以看出本文提出的自动布局算法的实验结果和真实布局案例的相符程度高,对实际布局有参考意义。此外,实验结果也表明,该算法针对不同长宽的卧室、不同家具组合和数量具有较强的适应性和兼容性。
除了表2给出的典型布局实验外,为了验证计算时间轻量化,本文针对8个不同卧室大小和家具组合的布局输入进行布局时间测算,如表3所示。
可以看出,针对不同大小的卧室和家具组合,均可在毫秒级的时间内计算出布局结果,并且随着家具个数以及房间大小的增加,计算时间增长平稳缓慢。
除此之外,表2展示的前5个实验结果是针对空房间的箱体建模和自动布局,建模的效果较好,失真度小,结合自动布局的结果能很好地说明虚实融合。为了对虚实融合进行增强性说明,在后3个案例使用了本身就包含少量家具的原始图片,由于这样的图片素材较少,这里采用的是自己制作的素材图片。从后3个的实验结果中可以看出,由于本身包含的家具会使得箱体模型效果略逊于空卧室的情况,但箱体理念仍然能得以充分表达。此外布局结果并没有受到原始家具的影响,图片本身包含的家具能和新加入的家具一起参与自动布局并得出正确结果,更好地说明了虚实融合的理念。
除此之外在布局后的卧室箱体中进行漫游,漫游区域和朝向也能得到充分和正确的限制。
8 结论
本文针对当前房间建模的操作繁琐性,以及室内自动布局平台和算法中存在的人工干预,同时布局响应速度不理想等问题进行了研究,采用一种基于图像渲染的画中游技术来生成卧室场景三维箱体模型,并在箱体中应用基于能量分布函数的放置场自动布局算法自动计算家具位置。本文在Web3D环境中的实验结果表明,该设计使得用户能快速根据自己的卧室场景建立三维模型,并在三维环境中实现较好较快的布局,同时生成箱体漫游策略,最终实现虚实融合。

Table 2 Experimential results表2 实验结果

Table 3 Running duration of automatic arrangement表3 布局运行时间
本文提出的设计思想,不仅可以用于卧室布局中,也可扩展到其他类型房间布局中,如客厅、厨房等,同时建模的方式也可以扩展到柱面全景或球面全景等场景建模中。
[1]Wang Haifei,Jia Jinyuan,Xie Ning.Vanishing point detection and scene reconstruction of cluttered room[J].Journal of Frontiers of Computer Science and Technology,2016,10(5):678-687.
[2]Kroeger T,Dai Dengxin,Gool L J V.Joint vanishing point extraction and tracking[C]//Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition,Boston,Jun 7-12,2015.Washington:IEEE Computer Society,2015:2449-2457.
[3]Zhai Menghua,Workman S,Jacobs N.Detecting vanishing points using global image context in a non-manhattan world[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition,Las Vegas,Jun 27-30,2016.Washington:IEEE Computer Society,2016:5657-5665.
[4]Kang H W,Pyo S H,Anjyo K,et al.Tour into the picture using a vanishing line and its extension to panoramic images[J].Computer Graphics Forum,2010,20(3):132-141.
[5]Li Zhi.Research and realization of spherical panorama navigation system based on TIP[D].Kunming:Yunan University,2014.
[6]Yang Ji,Chen Xiaowei.Research and implementation of VR model based on panorama[J].Application Research of Computers,2004,21(1):249-250.
[7]Fisher M,Ritchie D,Savva M,et al.Example-based synthesis of 3D object arrangements[J].ACM Transactions on Graphics,2012,31(6):135.
[8]Hays J,EfrosAA.Scene completion using millions of photographs[C]//Proceedings of the 34th International Conference on Computer Graphics and Interactive Techniques,San Diego,Aug 5-9,2007.New York:ACM,2007:4.
[9]Akase R,Okada Y.Automatic 3D furniture layout based on interactive evolutionary computation[C]//Proceedings of the 7th International Conference on Complex,Intelligent,and Software Intensive Systems,Taichung,China,Jul 3-5,2013.Washington:IEEE Computer Society,2013:726-731.
[10]Liu Milan,Jiang Hao,Xu Weiwei,et al.Automatic indoor areas layout for indoor scenes based on example database[J].Journal of Computer-Aided Design and Computer Graphics,2017,29(1):90-100.
[11]Merrell P,Schkufza E,Koltun V.Computer-generated residential building layouts[C]//Proceedings of ACM SIGGRAPH Asia 2010,Seoul,Dec 15-18,2010.New York:ACM,2010:181.
[12]Yu L F,Yeung S K,Tang C K,et al.Make it home:automatic optimization of furniture arrangement[J].ACM Transactions on Graphics,2011,30(4):86.
[13]Merrell P,Schkufza E,Li Z,et al.Interactive furniture layout using interior design guidelines[C]//Proceedings of ACM SIGGRAPH 2011,Vancouver,Aug 7-11,2011.New York:ACM,2011:87.
[14]Song Peihua,Jia Jinyuan.Online furniture layout method based on case-based reasoning and distance fields[J].Journal of System Simulation,2016,28(10):2438-2447.
[15]Chen Guangming,Li Guiqing,Liu Pei,et al.Hierarchical constraints with particles swarm optimization for furniture arrangement[J].Journal of Computer-Aided Design and Computer Graphics,2014,26(10):1603-1612.
[16]Smith G,Salzman T,Stürzlinger W.3D scene manipulation with 2D devices and constraints[C]//Proceedings of Graphics Interface,Ottawa,Jun 7-9,2001.Toronto:Canadian Information Processing Society,2001:135-142.
[17]Xu Wenzhuo,Wang Bin,Yan Dongming.Wall grid structure for interior scene synthesis[J].Computers&Graphics,2015,46(1):231-243.
[18]Coyne R,Sproat R.WordsEye:an automatic text-to-scene conversion system[C]//Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques,Los Angeles,Aug 12-17,2001.New York:ACM,2001:487-496.
附中文参考文献:
[1]王海菲,贾金原,谢宁.复杂室内图像的灭点检测与箱体重建方法[J].计算机科学与探索,2016,10(5):678-687.
[5]李智.基于TIP的球面全景图漫游系统的研究和实现[D].昆明:云南大学,2014.
[6]杨记,陈孝威.基于全景图像的VR建模研究及实现[J].计算机应用研究,2004,21(1):249-250.
[10]刘米兰,蒋浩,许威威,等.基于案例库的室内区域自动布局方法[J].计算机辅助设计与图形学学报,2017,29(1):90-100.
[14]宋佩华,贾金原.基于案例推理及距离场的家居在线布局方法[J].系统仿真学报,2016,28(10):2438-2447.
[15]陈光明,李桂清,刘培,等.家居布局的层次化约束及其粒子群优化[J].计算机辅助设计与图形学学报,2014,26(10):1603-1612.
猜你喜欢
现代装饰(2021年5期)2021-12-02
玻璃纤维(2021年3期)2021-07-20
文苑(2018年18期)2018-11-08
意林·少年版(2018年10期)2018-05-30
百科探秘·航空航天(2016年6期)2016-12-01
科技资讯(2016年6期)2016-05-14
现代商贸工业(2016年35期)2016-04-09
专用汽车(2016年9期)2016-03-01
早期教育(家庭教育)(2009年9期)2009-10-20
数码家居(2009年7期)2009-08-31
