
辅助人体站立系统的研究与设计
2018-04-13 01:06苏明亮王新安覃元元
计算机技术与发展 2018年4期
苏明亮,王新安,覃元元,何 想
(北京大学深圳研究生院,广东 深圳 518055)
0 引 言
随着全球人口老龄化趋势的加剧,老年人的市场需求越来越受到关注。由于生理机能逐年下降,下肢力量愈发不足,不少老年人存在站立困难的问题[1]。另外,脊髓损伤患者、膝关节乏力病人、下肢残疾人等,也面临同样困境。为了解决老年人和患者站立困难的问题,国内外众多专家学者进行了大量研究,提供了一些性能可靠的辅助站立方案,帮助老年人和患者自行站立,同时锻炼和调节他们的下肢肌肉,改善他们的生活自理能力。
随着计算机科技和嵌入式技术的高速发展,辅助站立系统也逐渐向高科技化、高性能化、高可靠性发展。美国公司Endorphin推出的一款辅助站立座椅[2],通过使用闭环式调节系统,协助使用者进行站立训练,能够锻炼他们的下肢力量,改善心肺适应性。意大利一家公司设计了一款名为StruzzoPlus[2]的站立装置,既可调节座椅的高度,又可通过两侧扶手和腿部靠垫提供支撑力,帮助使用者完成站立动作。相比国外,国内的站立研究仍处于实验探索阶段;哈尔滨工业大学提出的起立康复机器人[3]和平面连杆辅助起立系统[4],采用两种不同的装置结构进行实现,帮助使用者完成康复训练,具有较高的研究价值和医学价值。但由于高昂的研究成本和用于康复治疗的目的,辅助站立设备在国内普通家庭难以得到大规模的推广与应用。
文中通过建立人体数学模型模拟正常站立动作,进行运动学研究和分析;提出一种两自由度的辅助装置结构,并且结合座椅压力和足底压力实现符合人体站立过程的辅助装置控制系统。为适应使用者不同的体重和实现稳定安全的驱动效果,选择光电式编码器TRD-NA1024NW、霍尔传感器3144[5]实现闭环系统,加入紧急按钮装置和防漏电模块、电机减震设计等,提高系统的安全性与可靠性;并且通过足底压力对比实验,检验辅助站立系统对人体实际站立过程中起到的作用。
1 站立过程运动学分析
人身上有六百多种肌肉、两百多个大小关节,即便完成一个简单的动作,也需要依靠多种肌肉、关节、神经进行配合。人体站立过程中,大腿的所有肌群、小腿的所有肌群,以及背肌、腹肌等都会发挥作用;肌肉克服身体重力、地面摩擦力,完成人体向上、向前的动作[6-7]。
每个人站立的动作不尽相同,但是都有一定的规律。站立过程中主要依靠大腿、小腿的肌群,以及3个自由度的运动,即髋关节、膝关节和踝关节的旋转运动[8]。观察、分析、试验,寻找人体站立的特征点,进行运动学分析;然后在这个基础上,设计辅助站立系统提供合适的动力和速度。
1.1 人体站立过程分析
经研究,人体站立运动过程通常分为三个阶段。第一阶段:身体向前倾斜,双脚向后撑地,臀部和脚部同时用力,产生站起过程所需的动力,此时人体重心保持不变,属于人体站立的准备阶段;第二阶段:臀部离开座位,脚部持续用力,人体向前向上同时运动,此时重心向前上方移动;第三阶段:身体依靠惯性继续运动,基本只向上运动,直到人体完全站立,此时重心达到最高点[9-10]。
人体站立在前两个阶段需要用到的力气最大,也是辅助站立系统最需要提供动力的时间点。人体坐下运动过程与站立运动过程比较类似,可以根据人体站立运动过程进行逆向分析。
1.2 数学模型简化
人身上有六百多种肌肉、两百多个大小关节,如果对人体站立的所有自由度都进行分析,分析过程会过于复杂,也难以得到想要的结果。因此,结合数据建模的思想,需要对人体模型进行简化。以人体测量学中的正中矢状平面作为标准面,并且以地面为固定参考坐标系XOY,建立人体站立数学模型[11-12]。人体站立模型主要包括髋关节、膝关节、踝关节、上身、大腿、小腿、脚;其中包含的髋关节、膝关节和踝关节3个自由度,完成人体下肢运动。
1.3 人体站立运动学分析
建立的人体数学模型包含髋关节、膝关节、踝关节、上身、大腿、小腿、脚。假设髋关节的坐标为(xk,yk),膝关节的坐标为(xq,yq),踝关节的坐标为(xl,yl),臀部的坐标为(xt,yt),小腿、大腿、上身与水平面间的夹角分别为θ1、θ2、θ3,小腿的长度为l1,大腿的长度为l2,上身的长度为l3。选定踝关节为原点,即(xl,yl)设为(0,0)。
下面分别计算膝关节、髋关节的质心位置以及臀部的运动情况。
由数学关系和踝关节设定的条件,可得膝关节的坐标(xq,yq)[13]:
(1)
同理,髋关节的坐标(xk,yk)为:
(2)
结合上述两式,化简可得人站立过程中髋关节的坐标:
(3)
由l1,l2的变换矩阵,以及膝关节的坐标和髋关节的坐标,可得臀部的齐次变换矩阵,并进一步得到其位置和角度[13]:
(4)
(5)
(6)
对上式求导,可得臀部的速度为:
(7)
再对速度公式求导,可得臀部的加速度为:
(8)
2 辅助站立系统分析与结构设计
2.1 站立过程测量实验
根据上述的位移、角度、速度、加速度公式,进一步通过实验测量人体站立过程中臀部(或髋关节)的运动情况。选择16名身高(1.60~1.75 m)、体重(50~75 kg)有区别的正常人作为实验者,在规定的时间(通过50次站立测量,采用频次最大的2 s)内进行站立运动;通过单反相机以0.1 s的时间间隔获取实验者髋关节的运动轨迹数据。
实验要求:实验者上身挺直,双目平视,双手合十放在胸前,双脚自然放平,臀部自然坐在座椅的正中央处(以座椅质心在地面的映射点为坐标原点)。脚底和座椅上放置压力测试装置;腰部挂靠并固定在臀部位置的角度测量装置。实验者在规定时间2 s内,完成从坐姿到站立的自然动作。为了保证实验的准确性,在实验前让实验者参与三次训练,然后实验记录五组数据,并选择误差最小的一组作为实验最终输出[9]。
此处选择5名身高体重有差异的实验者(P1:身高1.68 m,体重65 kg;P2:身高1.72 m,体重72 kg;P3:身高1.65 m,体重70 kg;P4:身高1.75 m,体重75 kg;P5:身高1.70 m,体重74 kg)的测试数据进行分析。
根据髋关节在规定时间范围内水平方向和竖直方向上的运动位移数据,分别绘制出相应的位移曲线。人体站立过程中髋关节的水平方向运动X-Time曲线(单位:m)如图1所示,髋关节的竖直方向运动Y-Time曲线(单位:m)如图2所示。
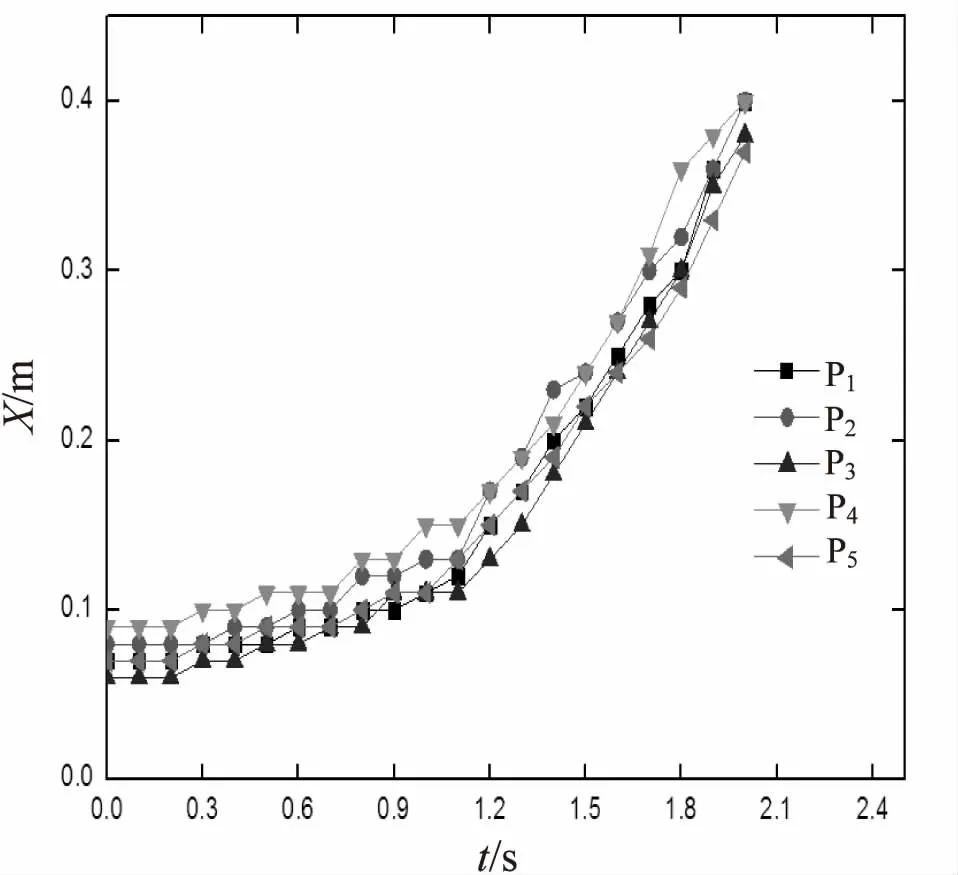
图1 髋关节水平方向位移曲线
通过固定的角度测量装置获取实验者在站立过程中不同时间点臀部的角度,其变化曲线如图3所示。
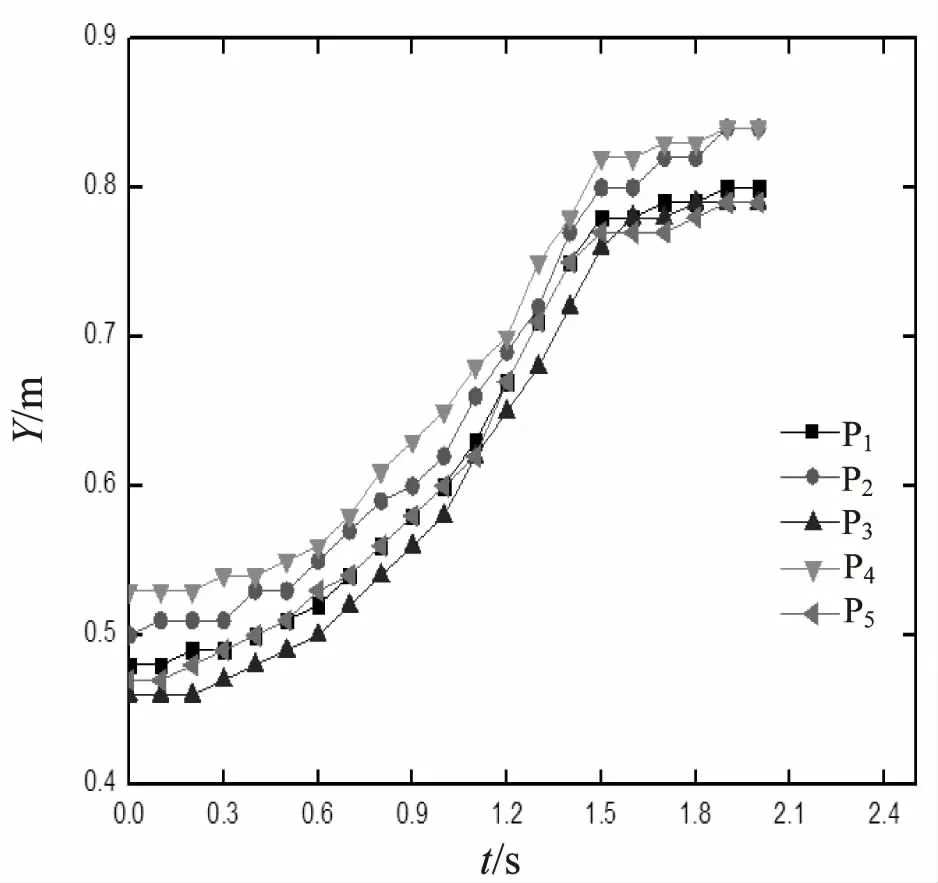
图2 髋关节竖直方向位移曲线

图3 臀部角度变化曲线
从图1和图2的运动轨迹可以看出,实验者的站立过程大致可以分为三段:在0.0~0.85 s内,髋关节水平和竖直方向都作缓慢运动,水平运动斜率0.037±0.002 m/s,竖直运动斜率0.100±0.020 m/s;在0.85~1.5 s内,髋关节水平和竖直方向都作较快匀速运动,水平运动斜率0.172±0.015 m/s,竖直运动斜率0.314±0.035 m/s;在1.5~2.0 s内,髋关节水平方向继续保持较快运动,竖直方向又恢复到缓慢运动的过程,水平运动斜率0.330±0.035 m/s,竖直运动斜率0.040±0.010 m/s。
比较图1内的位移曲线,曲线④为身高偏高(1.75 m)的实验者,曲线③为身高偏低(1.65 m)的实验者,曲线④的初始值和结束值与曲线③接近,而且变化趋势类似;比较图2内曲线④和曲线③的变化,二者的初始值和结束值有明显区别,曲线③处于最低处,曲线④处于最高处,二者变化趋势类似。因此,辅助装置需要座椅起始和结束高度自适应,提供竖直方向不同的助力,适配不同身高的使用者进行使用。
比较图1内的位移曲线,曲线④为体重偏重(75 kg)的实验者,曲线①为体重偏轻(65 kg)的实验者,曲线④和曲线①的斜率无明显区别;比较图2内曲线④和曲线①的变化,曲线①的斜率要略微高于曲线④,二者变化趋势类似,曲线①更加平滑。因此,辅助装置需要适配体重偏大的使用者,避免影响系统的供力装置、运行速度;可考虑采用闭环系统,进行反馈调节,解决个体体重差异带来的问题。
比较臀部角度变化曲线,如图3所示,在站立过程中,臀部角度逐渐变大(变化范围20°~-80°)。臀部角度变化体现在,站立过程中,身体前倾,臀部角度变大,力矩减小,减少对肌肉的压力,更易于站立。因此,辅助装置需要提供臀部座椅的倾斜助力,以及背部、小腿的辅助支撑力,辅助臀部完成较大角度的变化。
2.2 辅助装置的结构设计
结合实验分析可知,辅助站立装置需要提供给使用者水平向前和竖直向上的助力、臀部倾斜助力,以及给背部、臀部提供支撑力。辅助站立装置的结构设计有多种方式,如图4(a)所示。一款起立康复机器人装置结构[3]中,共有三个滑块提供助力。滑块1提供竖直向上的动力,滑块2提供水平向前的动力,滑块3与弹簧结合使用起到减震的作用。起立康复机器人装置结构明晰易懂,但是需要充分协调滑块1和滑块2的速度和助力大小,满足站立过程中向前上方的运动曲线。如图4(b)所示,基于平面连杆的辅助站立系统[4]通过三个连杆提供助力。连杆AB提供动力并且调节角度变化,带动其余两个连杆进行运动,在运行过程中始终保持两个杆件平行,确保座椅始终处于水平。该结构设计较为巧妙,但是升降的高度受限,需要较大的力矩完成。
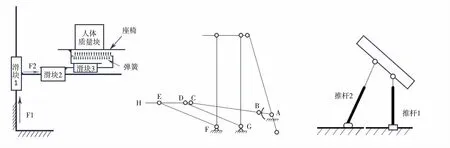
图4 辅助装置的结构设计
结合站立过程测量实验,可以知道人体站立过程中水平方向上的运动位移x的变化、竖直方向上的运动位移y的变化以及臀部的角度θt的变化;如图4(c)所示,提出一种两自由度辅助装置的动力学模型,由于在站立过程中人与座椅、地面之间存在摩擦力,需要增强座椅和地面的粗糙程度,防止站立过程中打滑;推杆1用来提供人站立过程向上的推力,推杆2由推杆1带动旋转的同时,自身产生斜向上的推力;二者始终保持座椅的平面与水平面的夹角符合人体站立过程中臀部的角度变化。另外,座椅间加入弹簧起到协调运动的作用,让人体在站立过程中起到更大的缓冲空间。
假设推杆1高度为h1,推杆2高度为h2,座椅的平面与水平面的夹角为θ,座椅长度为a,在不考虑摩擦力和弹性缓冲的情况下,可得这三者之间的关系为:
(9)
由此可见,通过控制推杆1和推杆2的速度,能够控制座椅的升降度,并结合实验数据模拟人体正常站立时臀部的运动规律,调整座椅的倾斜度与脚垫的摩擦程度,满足人体工程学,达到辅助站立的目的。
3 辅助站立系统的设计
3.1 系统整体架构设计
根据图4(c)的结构设计以及系统功能,文中设计实现的辅助人体站立系统主要包括控制单元、传感单元、电机控制单元、交互单元以及供电单元。其中,控制单元中选择主流的、资源较为丰富的STM32F103作为主控芯片,重点完成传感输入反馈与机电的闭环控制策略;传感单元包括足底压力、座椅压力、陀螺仪等传感模块,采集数据进行监控,协调主控芯片进行机电控制;电机控制单元主要包括电动推杆、光电式编码器、霍尔传感器等,主要实现闭环控制的效果;交互单元主要包括输入单元、按键控制单元,提高系统的交互友好性;而供电单元主要包括电源管理模块、防漏电装置,提高系统的安全性。系统整体架构如图5所示。
3.2 传感单元和交互单元
传感单元包括足底压力、座椅压力、陀螺仪等传感模块。足底压力模块可以通过判断脚底压力是否剧增,确定使用者是否需要站立,从而启动辅助站立系统;座椅压力模块可以通过判断臀底压力是否低于原来坐下的臀底压力的5%,确定使用者是否已经完成站立。此外,可以通过综合足底压力和座椅压力的情况,调整电机输出的转矩。陀螺仪模块主要用于测量推杆电机在运行过程中的角速度,通过检测电机过速或过缓造成的角速度偏移预设值的情况,采取紧急应对措施。此外,通过陀螺仪计算座椅的角度值也是驱动系统启动与停止的重要标志。
交互单元主要包括输入单元、按键控制单元。输入单元可以输入使用者的身高,控制系统会相应地调整电机运行参数;按键控制单元包括系统紧急制动按钮,以及电机手动控制按钮,为使用者提供可选的控制方案。
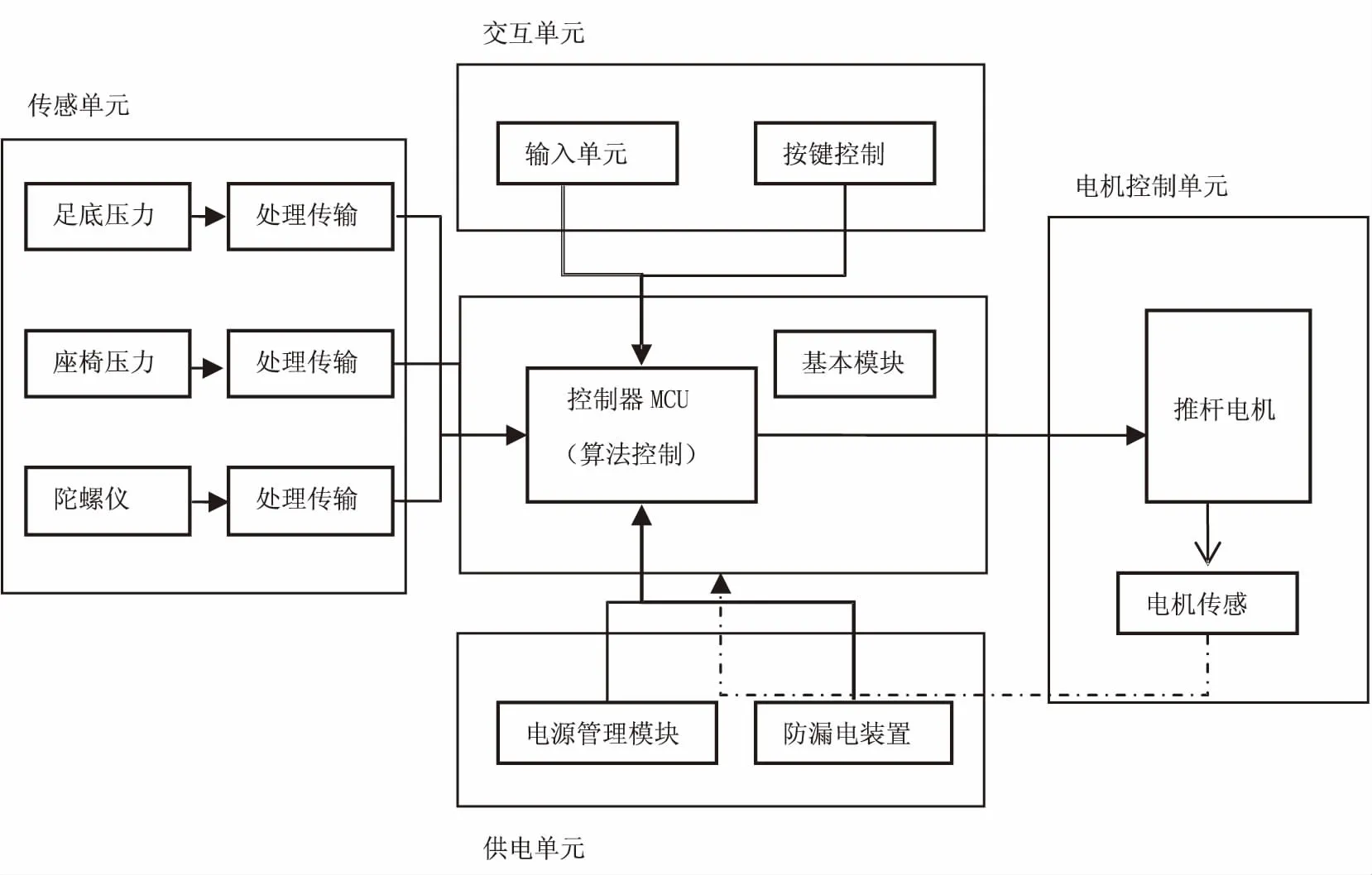
图5 系统整体架构
3.3 电机控制单元
文中采用的电机控制单元,以STM32F103作为主控芯片,结合光电式编码TRD-NA1024NW、霍尔传感器3144[5]进行闭环反馈调节,实现PID控制。根据使用者的体重和自身作用力大小施加作用力,有效控制电机的转速,模拟人体正常的起身站立过程。
主控制芯片STM32F103预设座椅的支承力大小和左右两侧推杆电机初始速度大小,将控制指令发给驱动器;驱动器输出相应大小的电流来控制推杆电机输出相应的转矩,同时电机的实际工作电流反馈给霍尔传感器、转速反馈给编码器。主控芯片根据反馈的实际电流值、转速值与预设值进行比较,对输出电流实时调整从而维持输出转矩的稳定。当驱动器或电机出现异常情况时,故障信号输出给控制器,控制器进行紧急制动。
3.4 系统验证实验
通过理论分析和模型建立可知,人体在站立过程中,身体的重量通过髋关节、大腿骨骼、小腿骨骼传至踝关节,最后通过足底传至地面。两只脚的足底压力相应表征了各关节、骨骼以及肌肉的承力大小[14-15]。通过对比实验,验证辅助装置在人站立过程中对下肢关节、肌肉减轻的作用。
选择一名身高1.72 m、体重68 kg的正常人作为实验参与者,在使用辅助装置和不使用辅助装置两种情况下限定时间正常站立(不借助扶手),分别进行五次测试;测试过程中,压力测试装置对实验者的足底压力实时变化进行采集。去除误差较大的测试数据,筛选站立时间接近的两组对照数据进行比较。实验者在不用和使用辅助装置的足底压力变化情况如图6所示。
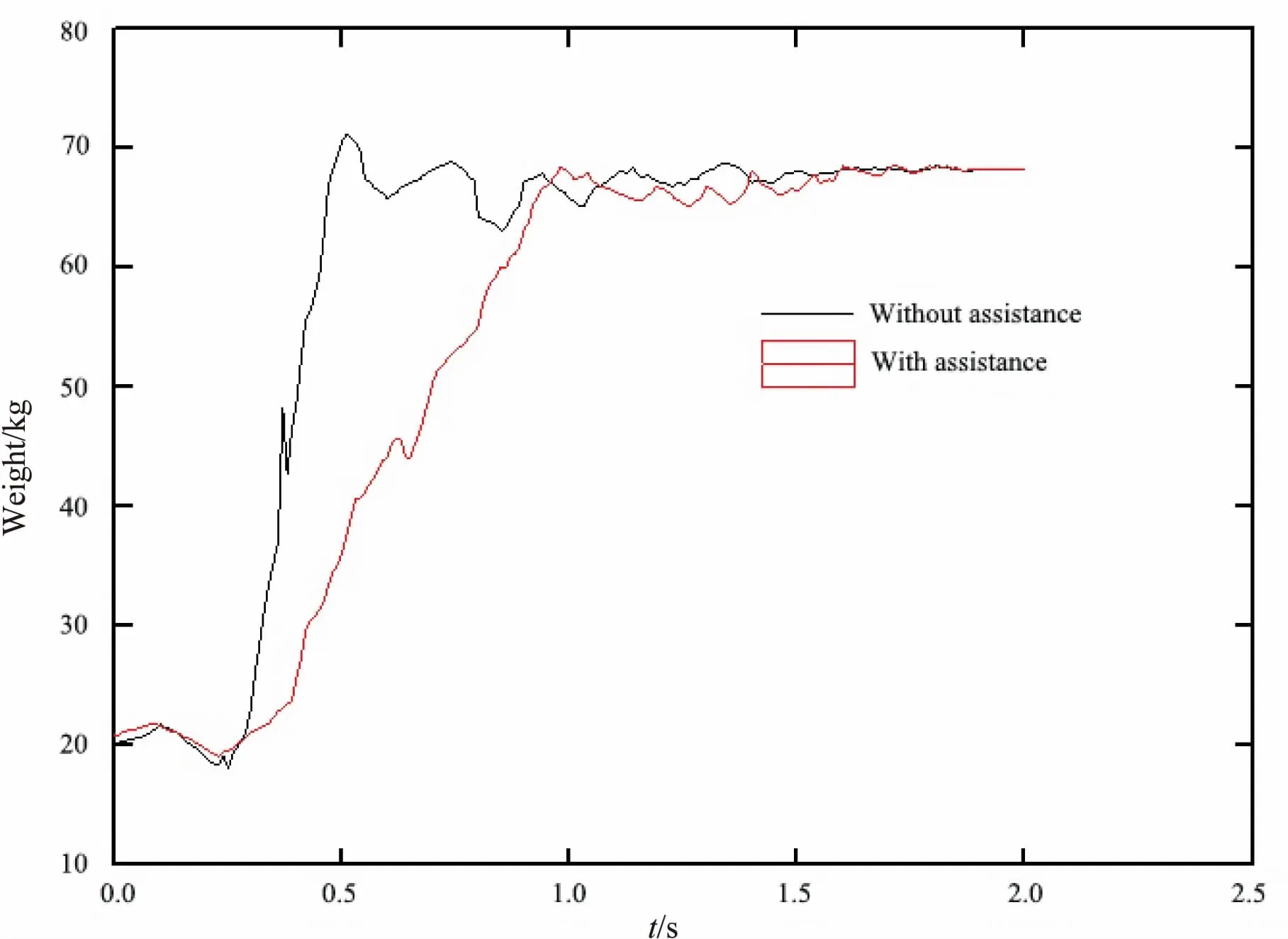
图6 足底压力曲线
通过不用辅助装置的曲线可知,人体站立过程中,当臀部接触座椅过程中,足底压力逐渐上升;当臀部离开座椅瞬间,足底压力急剧上升,超过人体正常体重值;当身体继续向上伸直到完全站立的过程中,足底压力在体重值附近波动。
通过对比两条曲线可以发现,在使用辅助装置站立时,花费的时间与正常站立接近,足底压力趋势也有类似:压力值先快速增加,然后缓慢增加。相比不用辅助装置的压力曲线,使用辅助装置的压力曲线前期没有急剧增长的过程,而是基本处于缓慢增长,后期趋于平稳,接近人体正常体重。说明足底承受压力在整个过程变小,尤其在站立的瞬间,原本需要的冲力给足底带来压力以及关节的承受力得到较大的缓解。辅助站立装置在人体站立过程中起到减轻下肢负担的作用,降低正常站立时起身瞬间带来的冲击力,较好地保护了下肢关节和脚部的支撑。
4 结束语
基于人机工程学原理建立人体数学模型,简化模型模拟人体正常站立运动,进行运动学分析和人体站立运动实验。根据数据建模和实验结果,设计一款两自由度的辅助站立控制系统。通过足底压力对比实验,证明该系统在人体实际站立过程中起到了一定的助力效果。结合计算机技术和自动化嵌入技术,辅助站立系统可以应用于多个场景,如日常生活、康复治疗等等。该系统仍有一些不足之处,需要进一步解决与完善,比如可增加腿部前后固定靠垫等,更好地满足人体力学的要求,并且在机械结构和响应速度方面有进一步的优化空间。
参考文献:
[1] 咸晓艳.从需求谈中国老年人日常生活用品设计[D].济南:山东轻工业学院,2011.
[2] KAMNIK R,BAJD T.Standing-up robot:an assistive rehabilitative device for training and assessment[J].Journal of Medical Engineering & Technology,2004,28(2):74-80.
[3] 姜洪源,马长波,李姗姗.一种新型辅助起立康复机器人的设计及逆运动学分析[J].中国康复医学杂志,2009,24(2):162-164.
[4] 李姗姗.人体起立过程建模与起立功能康复训练控制系统研究[D].哈尔滨:哈尔滨工业大学,2009.
[5] 王才东.六自由度教学机器人控制系统设计及实验研究[D].哈尔滨:哈尔滨工程大学,2008.
[6] 欧阳文昭,廖可兵.安全人机工程学[M].北京:煤炭工业出版社,2002.
[7] 崔来友,白士红,张春林,等.人体运动学模型的研究[J].机械设计与研究,2003,19(6):10-12.
[8] CONDIE E,CONDIE D. Functional electrical stimulation:standing and walking after spinal cord injury[J].Physiotherapy,1990,76(4):223.
[9] 王志强,姜洪源,Roman Kamnik.康复机器人辅助站立人体质心动量测试及模拟[J].吉林大学学报:工学版,2015,45(3):844-850.
[10] FUJISAWA N,MASUDA T,INAOKA Y,et al. Human standing posture control system depending on adopted strategies[J].Journal of Medical & Biological Engineering & Computing,2005,43(1):107-114.
[11] 孟庆鑫.穿戴式下肢康复外骨骼步态与控制策略研究[D].长春:长春理工大学,2014.
[12] ARTEMIADIS P K,KREBS H I.On the control of the MIT-Skywalker[C]//International conference of the IEEE engineering in medicine & biology.[s.l.]:IEEE,2010:1287-1291.
[13] 马志飞.辅助起立康复机器人控制系统的仿真与实验研究[D].哈尔滨:哈尔滨工业大学,2011.
[14] 王志强,姜洪源,Roman Kamnik.基于辅助起立机器人的人体起立动力学建模与试验研究[J].力学学报,2014,46(3):457-464.
[15] 陈云菲.基于FES的起立功能康复机器人设计及相关技术研究[D].哈尔滨:哈尔滨工业大学,2008.
猜你喜欢
心理研究(2022年4期)2022-08-10
中国典型病例大全(2022年11期)2022-05-13
中国典型病例大全(2022年9期)2022-04-19
冰雪运动(2020年4期)2021-01-14
自我保健(2020年1期)2020-03-13
散文诗世界(2019年6期)2019-09-10
婚姻与家庭·性情读本(2019年2期)2019-03-15
家庭科学·新健康(2017年12期)2018-01-09
爱你(2017年14期)2017-11-14
爱你(2016年18期)2016-04-10
