一种基于偏转镜的激光空间合束方法研究
2018-05-18 00:54李卫森郑耀锋
电光与控制 2018年5期
郭 豹, 张 兵, 黄 伟, 李卫森, 郑耀锋
(中国电子科技集团公司第二十七研究所,郑州 450047)
0 引言
光电精确制导武器在现代高科技局部战争中发挥着越来越重要的作用,同样,战术激光干扰武器、战略高能激光毁伤武器的性能也随着战争形势的需求变化及光电技术的快速发展而得以显著提升[1],在此过程中,高功率/能量激光器作为激光武器系统的关键组件,其技术水平能力显得尤为重要。
目前单台高功率/能量激光器对晶体、光学膜片、热畸变控制等有着较高的技术要求,且体积庞大、成本高、周期长,直接限制了其在激光武器系统上的应用,因此,在工程上为实现高功率/能量、高光束质量激光输出,通常采用合束的方法[2]。对脉冲激光而言,采用多台激光器进行时域精密同步合成及空域光路合束设计,以实现峰值功率上的累加效应和更远距离的作战。对连续激光而言,采用多台激光器进行空域合束为主,以实现在空间局部位置上的激光平均功率叠加,达到更好的作战效果。
国内外对激光合束做了大量的研究,提出了多种激光合束方案,如几何光学法、镀膜法等,广泛应用于光学实验、材料及军事科学,其中,几何光学法主要包括:1) 平板玻璃法,适用于对多束激光合成及传输效率要求不高的实验,其光学结构简单,但在未镀膜的条件下理论最高合成及传输效率为50%;2) 缺角直角棱镜法,适用于2束激光合成,其优点是合成效率高,但要求各光束激光尽可能地靠近,在工程上对结构及光学设计要求高,不适用于大口径光束的合成;3) 小角度全反射棱镜法,适用于多束激光合成,其合成和传输效率能够达到85%,但对五角棱镜顶点的加工要求很严格,光路设计复杂。镀膜法是对几何光学法的一种改进,主要针对多束不同波长的激光进行合成,利用先进的镀膜工艺,设计不同的光学镜组,如滤光片、棱镜偏振分光镜、平板偏振分光镜、多面反射镜、冰洲石双窗OE双输出棱镜等,结合组合透镜进行调焦,实现远场的空间合成[3-4]。
本文针对多路相同波长的大功率、大口径光纤激光束,通过对单光路进行高精度偏转反射、聚焦的优化设计,结合新型材料的镀膜工艺降低镜片的热畸变,根据激光测距信息,自适应调整与电视光轴的一致,实现在远场多路激光之间、激光轴与电视轴之间的自动合束调节。
1 空间合束原理
基于偏转镜的激光空间合束方法主要包括由反射镜组件、调焦模块、聚焦单元组成的光学部分及激光测距单元、电视成像单元等。以电视成像单元的视场中心轴为标准参考轴系,根据激光测距信息,分别计算并调节单路激光束的偏转角度及聚焦距离,形成在远场目标处的空间位置汇聚,同时,对电视图像进行光斑采样,分析激光光斑的质心对应于电视视场内的角度位置,作为偏转镜的微调环节的反馈,实现激光光轴与电视视轴在测距位置上的精确交汇。
根据距离信息对偏转镜进行调节,如图1所示。
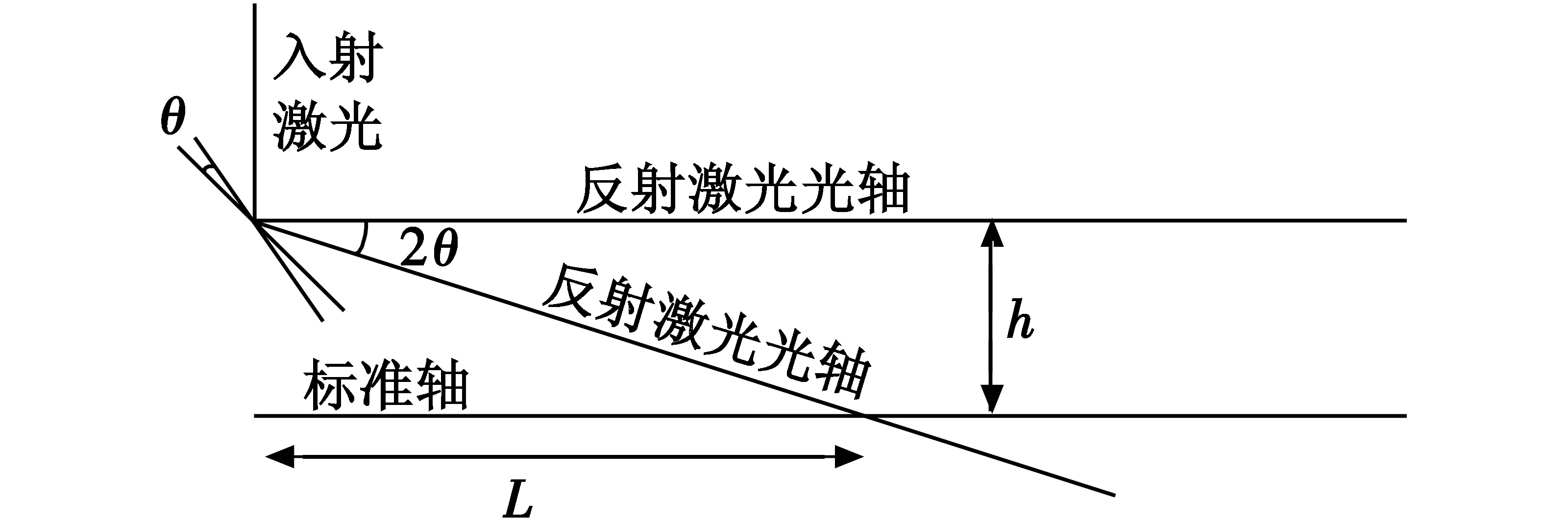
图1 偏转镜调节示意图Fig.1 Adjustment of deflection mirror
若激光光轴与电视视轴在同一个平面上,当间距为h,测距信息为L,偏转镜调整角度为θ时,激光轴调整角度为2θ,其对应的基本关系为
(1)
在工程设计上,受光学膜片加工精度、调焦偏差、安装误差等因素影响,激光轴与标准参考轴系一般不存在于同一个平面上,因此,往往需要对所设计的光学系统进行X,Y轴两个方向上的标定。
若标定后的偏转镜在位置L0上对激光轴的调整量为θx0,θy0,则对应在任一距离位置L,其X,Y轴方向上的调整量分别为
(2)
(3)
式中:hx,hy分别对应激光光轴与标准参考轴系在X,Y轴方向上的间距;kx,ky分别为偏转镜在X,Y轴方向上的经过汇聚单元后的扩束比系数,通常情况下kx=ky,但在工程应用上,需分别计算kx,ky,即
(4)
式中:θx1,θy1分别为在第1个位置点上偏转镜的X,Y轴角度值;θx1′,θy1′分别为在第1个位置点上对应电视视场内激光光斑的X,Y轴角度值;θx2,θy2分别为在第2个位置点上偏转镜的X,Y轴角度值;θx2′,θy2′分别为在第2个位置点上对应电视视场内激光光斑的X,Y轴角度值。
2 设计与标定
以2路大功率光纤激光为例,其远场空间合束设计如图2所示,包括合束光路设计、调焦设计、偏转镜控制及标定4部分。

图2 2路激光空间合束设计示意图Fig.2 Schematic diagram of 2 lasers’ beam combination
图2中,单一激光光路根据安装方式,采用反射、偏转、汇聚3种光路转换方式,并根据激光功率选择目前先进的多层镀膜工艺技术,反射镜、偏转镜膜片反射率及调焦模块聚焦单元膜片透过率均大于99.9%,保证了光学系统具有较小的热畸变。
2.1 光学设计
聚焦单元采用多片透镜组合的设计方式,如图3所示。
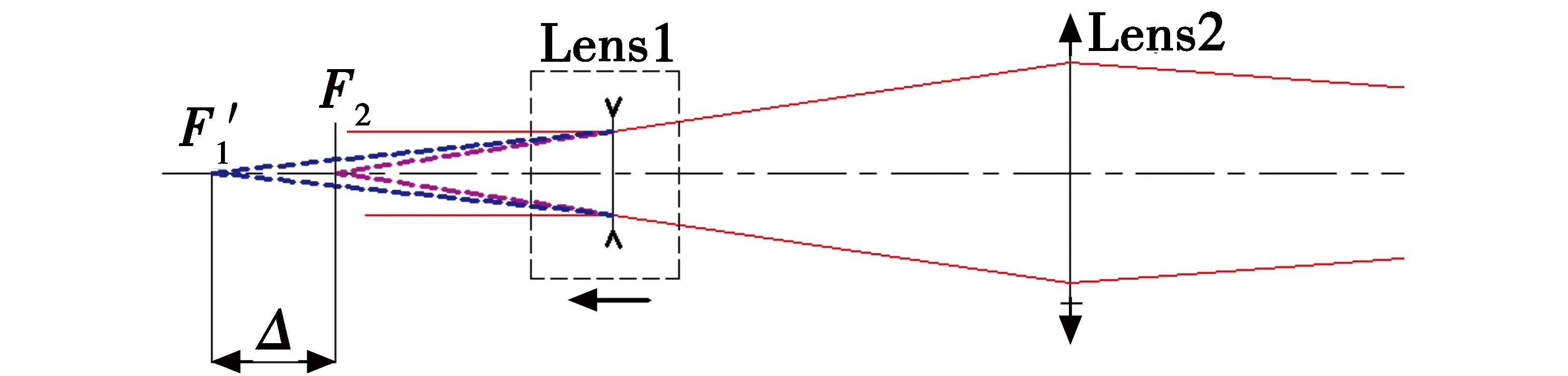
图3 聚焦单元设计Fig.3 Design of the focusing lens unit
根据几何光学参数变换,可以知道聚焦单元组合焦距f为
f=f1*f2/Δ
(5)

音圈电机作为一种基于安培力原理制造的电磁力驱动直线运动电机,与其他直线驱动方式相比,具有体积小、驱动电压低、运动精度高的优点[5],因此,采用高精度音圈电机作为聚焦镜组的承载平台,通过改变Δ的大小,改变聚焦单元的焦距,实现不同距离上的聚焦控制。
本文中选用的某音圈电机,最大加速度可达到 920 m/s2,总行程为 30 mm。驱动器的位置反馈来自于Heidenhain直线光栅反馈,经过细分模块,理论分辨率可达到 0.12 nm,同时,电机控制及驱动模块根据激光测距信息,计算相应的位移距离,实现聚焦镜组的快速、准确定位,通过对调焦及聚焦单元进行Zemax仿真分析,其理论聚焦光斑大小及调焦位置如表1所示,通过分析可知,50~1000 m焦距调整量为20.239 mm。
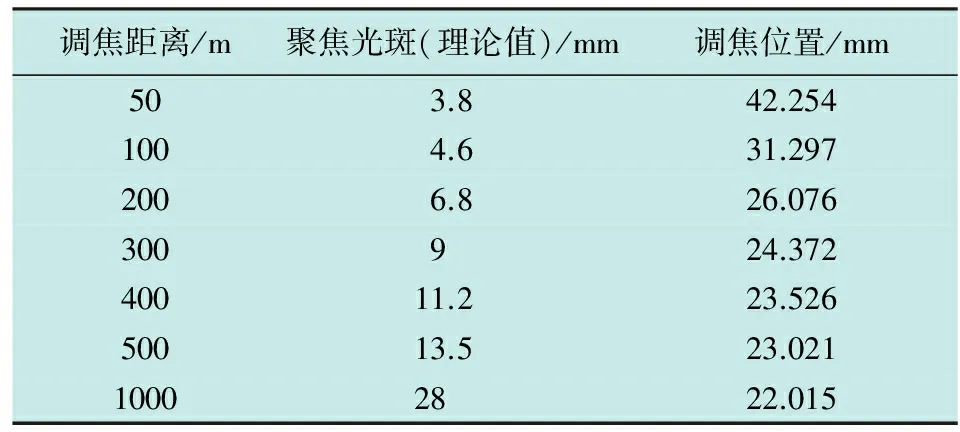
表1 调焦及聚焦分析
2.2 偏转镜控制
偏转镜组件主要包括摆镜、压电驱动器、控制器3部分,其中,摆镜与驱动器采用一体式设计方式,与控制器之间通过线缆连接。
两轴压电陶瓷式精密偏转镜,以90°平分放置,每轴采用2个压电陶瓷,以推拉模式形成偏摆运动,其原理如图4所示。
通过桥式连接电路闭环控制方式,由过位电阻应变片传感器或电容传感器对压电陶瓷驱动器的输出位移进行检测、采样,通过信号转换和 A/D转换送回控制系统,不断朝设定值进行反馈校正,以提高精度[6],同时,结合差分结构设计方式,能够在较宽的温度范围 (-10~50 ℃) 内保持良好的角度稳定性,具有较好的线性度、分辨率和定位精度。
选用3通道模拟和数字式偏转镜控制器,具备外部RS422通信功能,根据激光测距模块的距离信息,实现对偏转角度的分析与精确控制。
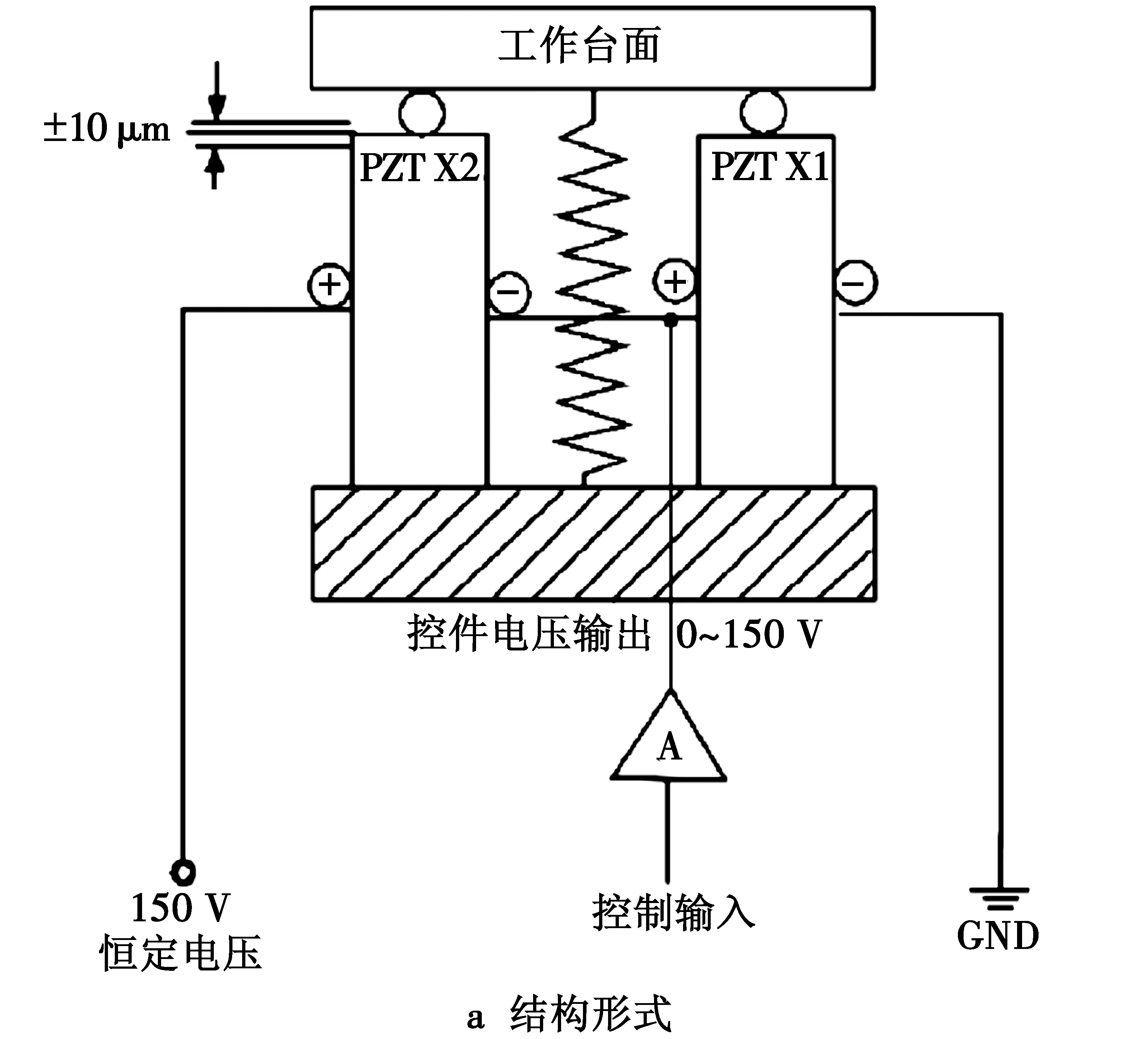

图4 压电陶瓷式偏转镜工作原理Fig.4 Principle of piezoelectric ceramic deflection mirror
偏转镜的控制流程如图5所示。

图5 偏转镜控制流程Fig.5 The control process of deflection mirror
2.3 标定方法
光束控制作为激光武器系统中的重要组成部分,每个组件的加工与安装误差均会对合束精度造成重大的影响,因此,除了提高加工与安装精度外,仍需对光学系统进行远场及近场的双重标定。
远场标定是通过设定标准的观瞄系统,结合平行光管、气动光学平台等专业设备,依次对激光测距光轴、电视视场轴进行远场调整,将其与标准观瞄系统轴处于平行状态。
近场标定主要是针对激光器光轴与电视视场轴之间的交叉标定,采用2点标校法进行标定。首先控制偏转镜处于θx,θy两个方向的中间位置点,通过微调结构装置,使2路激光光斑在所需的合束距离点L1上处于重合,此后,再选定一个不同的距离点L2,通过控制偏转角度,使2路激光重合,记录下2次的距离及偏转角度信息,即可用于计算在X,Y两轴方向上的扩束比系数,并实现根据距离信息的自动调节。
3 试验结果分析
在某设备的研制中,针对2路同等功率的高能光纤激光,采用本文合束方法的试验条件如下所述。
1) 调焦及合束距离点。
因试验场地空间有限,通过激光测距机测量,其平视、通视最远距离为187 m,因此选择184 m作为合束的第1个位置点,107 m位置点(最近极限合束位置)进行验证;在仰视情况下,近处3层试验楼可悬挂试验材料的最远距离为275 m,因此选择253 m作为合束的第2个位置点,在272 m位置点进行验证。
2) 试验材料。
在近距离位置,以大块的木质试验板作为激光打击材料,易固定,且可单板多次测试,在远距离位置,为方便试验材料的固定,选择在试验楼外墙粘贴小块塑料材质试验板。
3) 激光出光时间。
以激光在试验材料上产生清晰可辨的光斑为准,通过多次的测试,发现对木质试验材料,在设定激光功率一定的情况下,激光出光时间约3 s即出现明显的烧蚀痕迹,同时可观测;对塑料材质试验材料,在同等激光功率下,激光出光时间约1 s即出现明显的烧蚀痕迹,同时可观测。
调焦效果如图6所示,通过钢尺比对及测量,上述4个位置点上的聚焦光斑直径分别为4.2 mm,6 mm,7.9 mm,8.4 mm,与表1的仿真结果相比具有较高的一致性和准确性。

图6 单路激光调焦效果Fig.6 Focusing effect of single laser
合束效果如图7所示。因合束后的激光功率较强,在试验板上灼烧形成的光斑边界模糊,因此通过测量形心间距的方式,判断合束精度。其中,木质试验板合束光斑中碳化较为严重的位置为形心,塑料材质试验板合束光斑中颜色发白处为形心。通过钢尺比对及测量,上述4个位置点上的2束激光形心间距分别为3.5 mm,4.7 mm,5 mm,6 mm,考虑到高能激光在大气传输中的影响,达到了预期的合束效果。
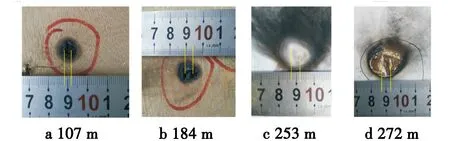
图7 2路激光合束效果Fig.7 Beam-combining effect of 2 lasers
为进一步验证合束前后的高能激光打击效果,选择深圳大疆公司的“精灵3”四旋翼无人机作为空中目标,经过对无人机的拆解,确定对易造成无人机坠落的关键部位(机翼与机身连接处,此处中空且线路密集,线路烧断或塑料壳体大面积损伤均会造成无人机无法平衡而坠落)进行激光打击试验,打击过程及效果如下所述。
1) 在430 m位置点上,无人机处于悬停状态;
2) 在跟瞄转台稳跟目标后,开启单路高能激光,26 s后,无人机坠落;
3) 在同样的位置点和高度,升起第2架无人机并悬停;
4) 在跟瞄转台稳跟目标后,启动合束功能,对准相同的打击位置,开启2路高能激光,11 s后,无人机坠落。
对无人机的毁伤打击效果如图8所示。

图8 高能激光对无人机毁伤效果Fig.8 The damaging of UAV by high-energy laser
通过上述对无人机的打击过程及效果可以看出,合束后的激光功率、打击能力得到显著提升,对无人机的打击时间减少了58%。
4 结论
本文设计并实现了基于偏转镜的2路激光合束装置,实现了对高能光纤激光束的远场汇聚功能,通过外场的调焦、合束、打击试验,验证了本文方法的准确性和装置的可行性,同时具有可扩展性,适用于多路激光的远场合束要求。但在调试过程中也暴露出了一些问题,如对光路的机械加工、安装、光轴标校精度要求较
高,以至于调试过程较为繁琐、时间过长,因此,在今后的研究中仍需对此做进一步优化。
参 考 文 献
[1] 刘京郊.光电对抗技术与系统[M].北京:中国科学技术出版社,2004.
[2] 高军涛,杨寿佳,李益民,等.基于精确延时控制的脉冲激光功率合成研究[J].光学与光电技术,2011,9 (4):52-56.
[3] 李红艳,任向军.光束合成技术研究及其应用[J].激光与光电子学进展,2002,39(7):22-25.
[4] 孙毅.多波段高功率激光合束技术及热效应研究[D].长春:中国科学院长春光学精密机械与物理研究所,2015.
[5] 邵琳达,赵英伟.音圈电机驱动小角度转台控制方法研究[J].兵器装备工程学报,2016,37(8):142-145,176.
[6] 李永锋,王诚,穆让修,等.基于压电偏转镜的激光扫描系统设计[J].电子设计工程,2015,23(9):138-141.
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
汽车维修与保养(2020年11期)2020-06-09
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
中国医疗美容(2015年1期)2015-07-12
空间控制技术与应用(2015年1期)2015-06-05