基于单目测距和逆向路径规划的自动平行泊车
2018-06-01 06:45刘迎节孙铭举戚健
汽车实用技术 2018年10期
刘迎节,孙铭举,戚健
(华北水利水电大学机械学院,河南 郑州 450045)
引言
随着我国汽车行业的飞速发展和人民生活水平的提高,人均汽车拥有量逐年上升。在乘用汽车逐渐增多的同时,泊车位变得供不应求,泊车空间的狭窄和复杂对驾驶者的泊车技术要求更高。一些刚上路的新手菜鸟甚至是经验丰富的司机在面对泊车位时也会倍感头痛。这就产生了对自动泊车的需求,而简单易操作的自动泊车系统更易受到消费者的青睐。在现阶段,我国对于自动泊车的研究仍处于实验室阶段,外国一些汽车生产厂家已经将自动泊车系统安装应用到乘用汽车中,所以我国针对于自动泊车的研究需要更加迫切。
国内外的专家学者针对自动泊车,主要是基于两种方法,一种是路径规划,一种是通过泊车驾驶经验利用模糊逻辑控制的方法[1-6]。
本文针对于日常生活中较为常见的平行式驻车提出一种简单的自动泊车原理,依照我国汽车靠右行驶的交通规则,在汽车右侧车身安装摄像头,以车身为参考系,则摄像头是固定的。依据单目测距几何原理,按照实际泊车中泊车目标位置坐标,确定其在摄像画面中基于像素单位的位置坐标,在图像中生成汽车车身轮廓线框,便于与泊车空间匹配,依据匹配过后的准确位置,逆向规划出泊车路径,执行自动泊车。
1 基于单目测距原理生成车身线框
1.1 视频图像中目标参数计算
在汽车右侧安装的摄像头,当汽车停止时,相对于车体、地面是固定的。其所拍摄画面的前后景深所对应的场景位置距离摄像头的距离不会发生变动,所以将摄像头安装到车上之后,可以在实际场景中测得摄像机安装高度 a,画面的前景深和后景深距离摄像头垂平面的距离l1和l2,如图1所示。由于画面都是一个个的像素组成,所以如果只通过单幅的画面计算目标距离,那么计算精度就不会超过目标在图像中单个像素所代表的尺寸,应用到汽车自动泊车系统中这个识别精度足够[7]。

图1 单目测距原理几何图
接下来通过几何计算得到目标点在真实场景中的位置与在图像中的位置之间的关系。目标点到摄像头的实际距离h02=a2+(b+l1)2,只有 b是未知量,下面根据相关计算得到 b和已知量的相关性,b是图像画面的前景深所显示的地面点到目标点所在地面的距离:

θ1、θ2分别为摄像头与地面的垂线和摄像前、后视野线的夹角:

β为前后景深视野线的夹角,由公式(1)和(2)可以得到公式(3)

根据文献[7]得到简化算法后的公式(4),M为图像Y轴上像素的总个数:

根据余切定理得到公式(5)

由公式(5)可以求出b得到公式(6)
由勾股定理得:

令h0为实际泊车时汽车距理想泊车位的距离,联立公式(3)(4)(6)求出y,得到公式(8),即可获得目标点在图像中的位置:

1.2 车身线框参数的构建
在我们现实生活中进行平行泊车时,初始阶段车身距离处在泊车位中的的汽车一般为0.5—1.5m,即图2中X的距离(也就是汽车距泊车位的距离),在本文的研究中 X取1.5m。根据上述的单目测距原理,在视频图像中生成车身线框,车身线框反应的就是汽车的外轮廓大小。那么在实际泊车场景中,这个车身轮廓线框所代表的汽车位置与车身的距离为1m。
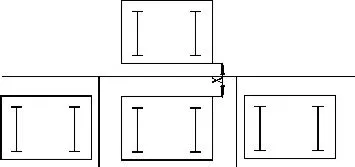
图2 车身线框示意图
2 平行泊车的轨迹规划
2.1 自动泊车工作流程
整个平行式自动泊车过程如图3所示。首先,驾驶员需要在汽车中,根据右侧摄像头所拍摄的画面结合肉眼的观察寻找泊车位,找到合适的泊车位后,按照车载屏幕所显示的画面,慢慢调整车的位置,使画面中的车身轮廓线框处于泊车位的中央位置,这就确定了目标泊车位置的坐标。由此逆向规划出平行泊车路径轨迹,限制起始位置与出发位置处于同一条水平线上,得到起始位置的坐标,最后驶员向前将车停放在规划好的起始点,即可开始自动泊车。
1)实验设备明显老化。所用的自动控制原理实验箱购置于2007年,老化严重,实验内容和设备已经远远跟不上社会发展。
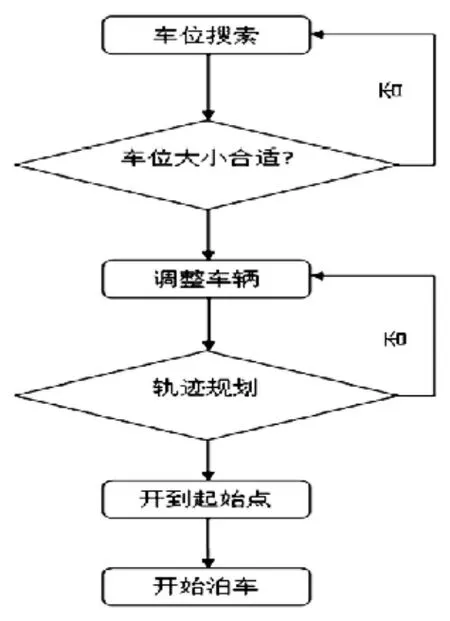
图3 自动泊车系统流程图
2.2 平行泊车轨迹模型
本文采用国家标准小车平行车位大小,长5.5公尺、宽2.5公尺。如图4所示,已知汽车的起始位置与出发位置位于同一条水平线上,出发位置和终点位置位于同一条竖直线上。现根据汽车的终点位置来逆向规划汽车的起始位置。
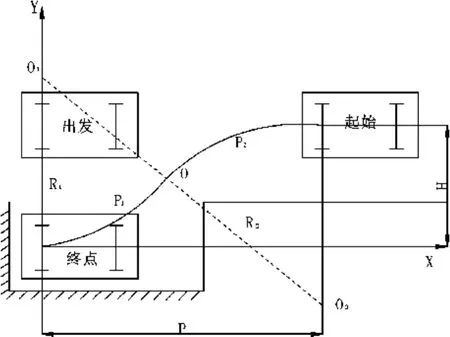
图4 汽车泊车过程
假设汽车在行驶过程中车身的瞬时航向角θ可由车载电脑测出。R1、R2为在汽车行驶过程中向左转弯和向右转弯的半径。H为处于出发位置的汽车中心轴线到终点停放位置汽车中心轴线的距离,P1为汽车前半段向左转弯时的路径,P2为汽车后半段向右转弯的路径,P为汽车的起始位置到终止位置的横向距离,也就是所求距离。根据图4可得:

由(8)(9)联立得:

其中d为车身的宽度,X和θ均已给出,即P可求。所以汽车的初始位置就可以确定。若要规划汽车路径,除了确定汽车的初始位置,还要具体研究汽车的泊车路径P1和P2,这就需要用到R1、R2。
由公式(8)(9)可得:

在汽车的终点位置确定后,P和 H都为固定值,所以R1+R2为定值。在泊车过程中汽车不是一直以最小转弯半径Rmin进行泊车。此时只需要再联立汽车转角和汽车路径弧长P′=P1+P2便可以通过公式 P′=Rθ来规划路径。但是 R1+R2的组合种类太多,没有办法确定精确的路径轨迹,这时就需要通过汽车的碰撞点来进行约束[8],从而确定 R1、R2的范围来规划路径。
本文采用逆向路径规划,如果汽车从泊车终点位置开出,考虑到车的右后方和右前方会发生碰撞。

图5 逆向碰撞约束

其中,R为后轴外侧轮的转弯半径;a、b分别为车辆的前悬、后悬;l为轴距;L为泊车位的长度。
令L为本文所研究的泊车位大小,R1=R+d,由此R1的大小受到 L的限制,进而 R2的范围也受到了限制,这有助于泊车轨迹的规划设计。
3 实验分析仿真
综上所述,当驾驶员通过视频图像中的车身线框对车位进行匹配之后,泊车的终点位置就唯一确定下来计算得出起始位置的坐标,两段转弯的圆弧半径R1和R2之和也能够被确定,通过碰撞点的约束条件,求出R1和R2的范围。汽车的泊车轨迹近似于反正切函数曲线,因此将两段相切的圆弧用反正切函数表示,实验采用车辆的基本参数如下图所示,另外为了保证安全性,增加 0.1m的安全余量,经过反复仿真实验计算得到平行泊车的轨迹路线,并使用Origin进行优化拟合。

表1 汽车基本参数

图6 泊车轨迹
根据规划出的平行泊车轨迹与实际泊车轨迹对比,可以看出经过优化拟合后的的轨迹曲线基本与实际情况曲线相吻合,曲线较平滑。两段圆弧的曲率变化范围在[-0.17 0.17],符合泊车时的最小转弯半径要求。

图7 泊车仿真
通过以上数据在搭建好模型的matlab simulink中进行仿真实验,从车辆泊车仿真实验图(图 7)中可以看出,在进行平行泊车的过程中,车辆车体的外轮廓线与左右两边的障碍物没有任何接触,车辆从水平的起始位置经过两段圆弧轨迹,车头能以水平的方向停放到泊车位中,符合泊车的规范性。
4 结语
(1)本文提出一种简单的自动泊车原理,基于单目测距在车载屏幕影像中预先生成车体的外轮廓线,驾驶者通过观看影像自主进行泊车位的匹配,根据泊车的目标位置完成轨迹的规划,驾驶员只需要将汽车行驶到起始点即可开始自动泊车。通过大量的仿真实验,验证了此方法的可行性。
(2)本文所研究的自动泊车系统,解决了于传统自动泊车时超声波实时测距需要泊车位两边有障碍物的弊端,去除了一些测距仪器,降低了成本,采用逆向碰撞约束分析,简化了约束条件,缩短了泊车的轨迹路线。
(3)针对生活中经常遇到的平行式泊车问题,以一种简单易操作的方法完成泊车,能在满足泊车规范性的前提下,不接触任何障碍物,使得汽车平稳安全的停放到驾驶员想要的位置上。但本文是在理想简单的条件下进行仿真实验的,对自动泊车系统的开发起到启示作用,如果想要将设计应用到实际的自动泊车中,还需要精确地计算和大量的仿真实验。
[1] 张仁永,曹凯,于善义,等.基于样条理论的泊车轨迹生成与仿真研究[J].农业装备与车辆工程,2014,52(2):27-31.
[2]任坤,徐艺,丁福文,等.基于机器视觉和模糊控制的自动泊车[J].华中科技大学学报,自然科学版2015,43:88-92.
[3] 李红,郭孔辉,宋晓琳,等.基于 Matlab的多约束自动平行泊车轨迹规划[J].中南大学学报,自然科学版,2013 (1):101-107.
[4] 宋金泽,戴斌,单恩忠,等.融合动力学约束的自主平行泊车轨迹生成方法[J].中南大学学报,2009,40:135-141.
[5] 郭孔辉,姜辉,张建伟,等.基于模糊逻辑的自动泊车转向控制 [J].吉林大学学报,工学版,2009,39(2):236-240.
[6] 刘钰,马艳丽,李涛.基于 Bezier曲线拟合的自主平行泊车轨迹模型仿真[J].科技报,2011,29(11),59-61.
[7] 陈大海,莫林,易向阳.固定摄像头图像中计算目标距离和尺寸的算法[J].大众科技,2011.
[8] 穆加彩,张振东,管登诗,等.自动泊车系统路径规划与控制研究[J].软件导刊,2017,16(5),113-117.
[9] 吴冰,钱立军,虞明,等.基于RBF神经网络的自动泊车路径规划[J].合肥工业大学学报,自然科学版,2012,35(4),459-540.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
中学生数理化·高一版(2022年4期)2022-05-09
新高考·高一数学(2022年3期)2022-04-28
汽车实用技术(2022年7期)2022-04-20
思维与智慧·上半月(2022年4期)2022-04-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
新高考·高一物理(2017年7期)2018-03-06
科技资讯(2012年28期)2012-07-09