软体机械手爪在果蔬采摘中的应用研究进展
2018-06-01 08:45刘勇敢
农业工程学报 2018年9期
彭 艳,刘勇敢,杨 扬,杨 毅,刘 娜,孙 翊
(上海大学机电工程与自动化学院,上海 200072)
0 引 言
果蔬具有丰富的营养物质,是人类生活中必不可少的食物[1]。中国是一个农业大国,从1994年起仅水果产量就已跃居世界首位[2]。根据2003年联合国粮农组织的统计,中国的果蔬年产量约为3.58亿t,约占全世界果蔬年产量的28%[3],截止2013年果蔬种植面积仍呈波动增长趋势[4]。果蔬采摘是果蔬生产链中最耗时、最费力的一个环节[5],但目前果蔬采摘作业主要依靠人工完成,存在效率低、成本高、劳动量大等问题。近年来,由于人口老龄化问题导致人力资源严重匮乏,已成为许多发达国家和发展中国家共同面临的问题[2]。人工采摘作业的成本在整个生产成本中所占比例高达33%~50%,因此实现果蔬采摘的自动化作业变得越来越迫切[6-7]。然而,果蔬的生长环境比较复杂,外皮大多较为脆弱,形状也复杂多变[8],在采摘过程中极易造成损伤,这将直接影响果蔬的储存、加工和销售,从而最终影响市场价格和经济效益[9]。因此,研究和开发能够减小果蔬损伤率的机械手对于解放劳动力、提高生产效率以及保证果蔬品质等具有重要意义。在保证稳定抓取的前提下,有效避免机械手对果蔬的损伤、实现柔顺作业,是果蔬采摘机器人技术的研究重点[1,6,8-10]。
近年来,传统的工业机械手相关技术已经趋于成熟,其使用不再严格局限于工业环境[11],很多农业采摘机器人的末端执行器直接使用工业用机械手,但存在体积大、灵活性差、成本高、采摘效率低[12-13]、通用性较差、与环境的相容性较低等问题,且构造和控制较复杂、柔性差,难以实现无损采摘。果蔬采摘机械手的应用需要具有以下特点:1)作业对象处于高度的非结构化与不确定的未知可变环境中[14]。因此,果蔬采摘机械手要具有高度的操作对象适应性,并且尽可能避免对周围环境及果蔬造成破坏伤害。2)能够应对采摘对象的质地脆弱易伤性及个体形状差异性。3)结构简单、可控性好、普及性好、可靠性高、价格合理[15]。4)包裹性强。传统机械手与果蔬的接触面积通常较小甚至是点接触,这种机械手一般难以改变他们的形状以适应多变的抓握对象[14,16-17],难以与果蔬的形状紧密匹配。针对果蔬采摘的特点,国内外学者对果蔬采摘机械手进行了大量的研究工作,研制出了自由度较多的末端执行器,如Arima等[18]研制了6自由度黄瓜采摘手;以及灵活性与柔韧性较高的欠驱动末端执行器和硬质连续体执行器,如美国俄亥俄大学的研究人员研制出了一种西红柿采摘机械手[19]、国内浙江大学金波等[20]研制了欠驱动结构的机械手等。总体来看,这些机械手大多由刚性铰链或者杆件构成,能够实现对目标物体精确的抓取操作,但是变形范围小、自由度受限、刚性强、缺乏必要的感知能力以及柔顺控制[21],即使在刚性材料表面镶嵌一层软体材料,也难以针对被采摘果蔬的特点实现包裹性抓取和采摘。
软体手出现后,因其优越的性能引起了国内外学者的广泛关注[22-26],迅速成为机器人领域的研究热点。软体手的设计灵感来源于自然界中的软体动物触角,如水母、章鱼和海星等[27-29],通常由柔软材料制成,具有较大的变形能力和无限的自由度,可在较大范围内根据目标物体的形状改变自身的形状和尺寸[30]。因此软体手可通过变形实现与被抓取物体的形态匹配并最终实现稳定的抓取动作。
1 软体手的概念及发展现状
新型软体手的出现为解决刚性果蔬采摘机械手灵活度差、柔顺性差、自由度受限、复杂环境适应性差等问题提供了新的思路和方法。以气压和线缆作为驱动,德国Festo和北京航空航天大学合作研制了象鼻+章鱼触手[31](图1a)和气动肌肉[32-33]等。美国哈佛大学Whiteside课题组以弹性硅胶为材料,结合3D打印技术,设计制造了以气动网络为执行器的软体手[34-36](图1b),具有承压小、变形大[37]、运动灵活,能够与环境实现互容等特点;Ge等[38]提出了一种新的 4D打印技术可使软体手具有可控的形状记忆行为;日本东芝公司设计的Toshiba灵巧手[39](图1c),能够实现抓取、移动物体和拧螺钉等动作,具有较好的柔顺性[40];北航文力研究组研制的软体手爪可以根据被抓取物体的大小形状调整其有效长度[41](图1d);Galloway等[42]设计了基于多气腔结构和纤维增强结构的两款海底生物采样软体手(图 1e和 1f),可以灵活地实现对海底多种形状生物体的采样。智能材料的运用,可以直接将物理刺激转化为位移,如介电弹性体(dielectric elastomer)[43-44](图 1g)、导电聚合物(electro active polymer,EAP)[45-46]、形状记忆合金(shape memory alloy,SMA)[47](图1h)、形状记忆聚合物(shape memory polymer,SMP)[48]等在软体机器人上的应用,具有广阔的发展前景。因此,将软体手应用于水果采摘作业将有望克服传统刚性机械手的缺陷,减小对果蔬的伤害。表1对比了各种机械手的相关特性[30,49],可以看出软体手更适合于形状多变的果蔬顺应抓取。
由于软体手属于近些年发展起来的新兴技术,因此在果蔬采摘中的应用也处于起步阶段。如意大利研究者Muscato等[50]采用螺旋排列橡胶片开发了柑橘软体采摘手,该软体手通过三个手指将柑橘抓紧后,机械臂后移拉紧以便于果梗进入切割区域(图 2a);由 Cambridge Consultants公司研发的配有视觉系统的六指软体采摘手,能够识别果蔬类别和成熟度,并且软体手能够根据果蔬的形状进行柔顺抓取[51](图2b);Tortga AgTech公司投资设计的草莓采摘机器人,其末端执行器采用柔软的硅胶材料并制作成网格形状,可实现草莓的定时柔顺采摘[52](图2c)。由此可见,软体手在形状和大小不同、易碎的果蔬采摘中将会发挥更大的作用。

图1 软体手实例Fig.1 Examples of soft robotic gripper
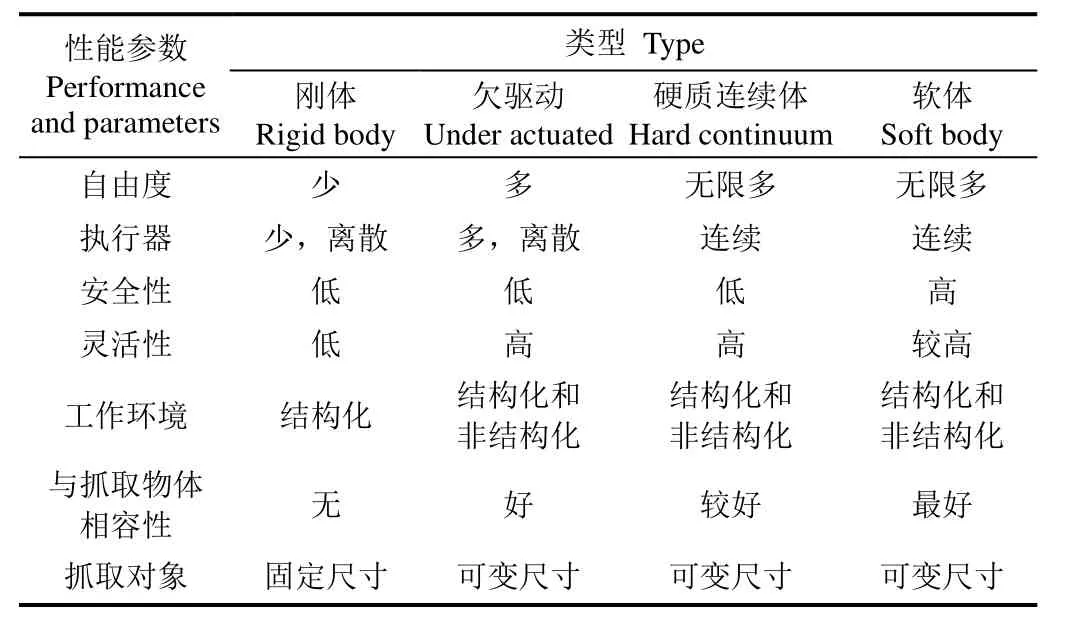
表1 机械手相关特性比较Table 1 Comparison of relative characteristics of manipulators

图2 软体采摘手[50-52]Fig.2 Soft picking grippers[50-52]
2 果蔬采摘软体手的驱动及应用分析
执行器是软体手设计的关键,从根本上决定了软体手的性能。软体手是软体机器人领域的一个分支,其驱动源的类型和结构往往具有相通性[53]。目前较为常用的驱动源主要包括化学反应、电荷刺激、加压流体、弹性材料、形状记忆合金等。与刚性机械手相比,软体手的控制和结构比较简单,操作和安装也很方便,而且具有高度的灵活性、适应性和通用性,能够与被抓取的果蔬形成很好的互容效果。软体手的出现克服了传统果蔬采摘机械手僵硬、环境适应性差等缺陷,具有“一手多用”的功能。根据驱动方式的不同,软体手在果蔬采摘作业中展现出了不同的特点。
2.1 气动软体手
气压驱动主要包括气动人工肌肉[54-55]和超弹性气动驱动[56-59]2种方式。气动人工肌肉是目前较为成熟的执行器,由外层编织套和内层橡胶管组成,可通过驱动气压的改变产生伸缩运动[60-61],其驱动结构如图3a所示。加压时,气动肌肉膨胀,从而产生轴向收缩力[62];当编织角θ0达到极限角θ时停止变形,因此可通过调节气压实现气动人工肌肉的收缩运动。
利用超弹性材料制成的气动执行器是一种简单有效的执行器,在加压或者受力时可以产生大变形,主要有加压流体弹性硅胶执行器[63-64]和纤维增强执行器[65]2大类。其中通过加压流体驱动的软体手由于其质量轻、功率高、成本低和制造容易等特点得到了较为广泛的应用,也是目前较为流行的软体手驱动方式之一。这种材料具有非线性特性,其结构主要由内嵌气道的主体气腔和限制层组成。如图 3b所示,可通过调节气室内部气压△P使软体手产生不同程度的弯曲变形[66-68]。另一种是通过纤维约束的思路设计的纤维增强型执行器,由超弹性材料(如硅酮、软玻璃、高密度聚乙烯纤维等)和不可伸展材料(编织物或纤维)[34,65]组合而成。当加压流体激活气腔时,由于纤维约束的不对称性会驱动空气室延伸,实现弯曲变形如图3c所示。通过改变纤维线的绕线方式和数量、增加气室的数量均可以实现多种更为复杂的运动方式[69-70]。
当气压逐渐增大时,气动软体手会产生变形,与要采摘的果蔬逐渐顺应互容,从而实现果蔬的包裹性采摘[70-72],如图 4所示。气动软体手具有制造方便、经济实用、性能稳定等优点,并且适应了果蔬采摘的特点,使果蔬的无损采摘变为可能。此外,气动软体手对操作者的技能要求低,更容易普及,已经有相关成果开始商业化;但缺点在于对装配精度要求较高,且需要额外的气源作为辅助机构。
2.2 拉线软体手
拉线是一种柔软且在长度方向上有较高拉伸强度的组件,因此,能够在软体结构中穿过复杂的路径且承受较大的力而不改变自身的尺寸。拉线驱动的基本原理是在结构上选取一些固定点,然后用线缆将其连接起来,并通过滑轮外连驱动电机,依靠驱动线的收放来驱动软体手的动作[73](图5a)。这类拉线装置具有较为复杂的结构且需要控制系统[74](图5b),因此增大了使用难度。
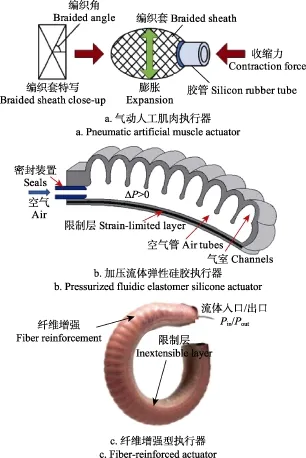
图3 气动执行器[67,70]Fig.3 Pneumatic actuators[67,70]

图4 气动软体手的应用[70-72]Fig.4 Application of pneumatic soft robotic grippers[70-72]
绳缆驱动软体手由软材料和欠驱动结构结合而成,通过对单根线缆张力的控制驱动手指运动,确保了对不同形状物体的适应能力。但是这种作动方式类似于欠驱动,相邻指节间存在较大位移量,故在果蔬采摘时拉线手指只能形成简单的弧面接触,不能对形状不规则的果蔬实现包裹式抓取,其应用如图5c、5d所示[75]。可以看出,拉线软体手的抓取效果不如气动软体手。由于手指要承受线缆的拉力,因此制作拉线软体手时一般选择杨氏模量较大的软材料,这也增加了拉线软体手的抓握能力[76],可以采摘和抓取相对大或重的果蔬。拉线软体手制作容易、成本也较低,但是受限于庞大的驱动系统很难实现小型化和集成化[37]。
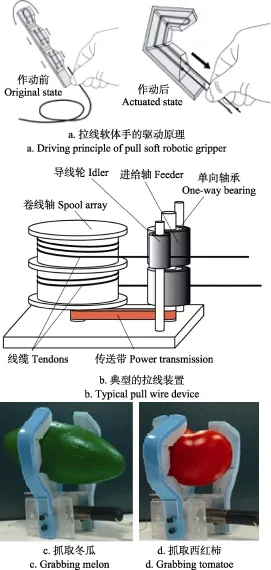
图5 拉线软体手[73-75]Fig.5 Pull soft robotic grippers[73-75]
2.3 SMA软体手
形状记忆合金 (shape memory alloy,SMA)是一种智能材料,受力易变形,表现出一定的被动柔性,且温度变化时形状也会发生变化(如图6a),当材料冷却时可回复至原来的长度[77-78],属于一种线性驱动,有弯曲和扭转 2种作动方式[79],具有较高的质量应力比,被广泛应用于软体手的驱动。
这种材料的变化特性源于材料本身的相变,可根据操作对象的形状做出自适应调整,而且SMA控制方便,无需外加辅助装置(包括压缩机、泵、阀门等)[80],通过改变电流脉冲信号的形式可以控制SMA材料的变形。在果蔬采摘应用中该作动方式可以实现柔顺采摘果蔬作业并且能够对果蔬形成包络保护。由于执行器的刚度低、柔性好,不仅对于外皮精致的小型果蔬会有较好的采摘效果,而且可在狭小空间内对抓取目标进行操作。不仅如此,智能材料本身作为执行器可实现对软体手的精确控制且具备感知能力,因此可根据外果皮的要求调整抓取力。但是该材料的响应频率有限,驱动速率比较低[81],会对果蔬采摘的效率造成影响。此外这种软体执行器较为柔软、承载能力较小,采摘果蔬时容易受到周围障碍物的干扰,且抓取不稳定。由于该执行器的制造成本高、技术还不够成熟,因此目前在果蔬采摘中的应用率相对较低。图6b、6c为其夹持作动图[78]。
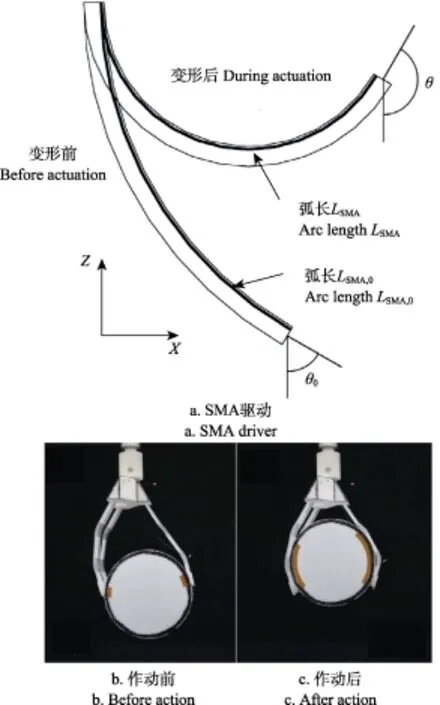
图6 SMA软体手[78-79]Fig.6 SMA soft robotic grippers[78-79]
2.4 EAP软体手
电活性聚合物执行器(electro active polymer,EAP)是一类易受电场影响而发生伸缩、弯曲、束紧或膨胀等形变的柔性智能材料[82-83]。根据电活性聚合物致动机理可以分为离子型(Ionic)和电子型(Dielectric)2大类[84]。在EAP薄膜两侧覆盖柔顺的电极,当对其施加外在电场或电压刺激时,EAP薄膜在电场的作用下会产生变形运动。由于其响应速度快且变形量大,得到了广泛的关注[85],其电子型介电弹性执行器的原理如图7a所示[86]。
这种执行器可以承受很大的变形,同时维持较大的输出力[87],而且完全电控,执行作动时不需要额外的辅助机构。在果蔬采摘中,可根据果蔬的形状做出自适应调整,对果蔬形成包裹抓取,并且采摘抓取比较稳定,响应速率快,如图7b、7c所示[88-90]。但是离子型EAP软体手机械强度较低,容易受到果蔬周围障碍物的阻挡,而电子型EAP软体手需要较大的电压支撑。有研究表明,对于60 μm厚的硅胶膜的驱动电压为3.5 kV[44],因此,使用成本会比较高,而且EAP存在较多的失效形式,如应力松弛、电击穿、褶皱等[88],从而将会对果蔬采摘造成一定的不利影响。因此目前在果蔬采摘中该执行器应用率也比较低,其主要原因与SMA执行器类似,都属于智能材料,具有很高的柔顺性,但由于该技术也处于起步阶段,不适合采摘质量和形状较大的果蔬。不同的是EAP执行器驱动的软体手能够在 100 ms实现打开和关闭[89],反应速度快、效率非常高,因此在果蔬采摘中的应用要强于SMA软体手。
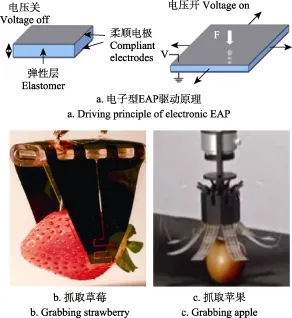
图7 EAP软体手[86,89-90]Fig.7 EAP soft robotic grippers[86,89-90]
3 果蔬采摘装置的建模与控制
3.1 果蔬采摘装置的建模
建模分析是机械手运动控制的基础。通过分析末端执行器、机械手各运动构件的位置姿态与果蔬之间的关系,构建果蔬采摘的运动学模型,是路径规划、实现稳定抓取控制的基础。运动学模型包括正运动学模型、逆运动学模型和微分运动学模型[91-92],而对果蔬采摘机械手的运动学建模研究主要是正运动学建模。文献[42]表明这种方法相对比较简单,即在给定关节角度和速度的情况下可实现末端执行器的有效抓取。
但对于软体手物理模型的建立是一项极具有挑战的工作。由于自身材料特性和连续的形变,无法像刚体运动学那样利用杆件长度和夹角进行求解[93],即使最简单的正运动学也无法直接套用公式进行求解。根据软体手以恒定曲率变形的特点,Jones等在常曲率假设的基础上,运用改进的D-H模型和几何分析研究出一套分段常曲率(piecewise constant curvature,PPC)理论模型[94-95],这种方法比较适合连续体机械臂和软体手指等细长结构,虽然大多数柔性细长体结构弯曲时并不是完全由圆弧组成,但可作近似圆弧处理。Duriez等[96]提出了基于有限元分析的可变固体力学的实时建模方法,该方法既可以对软体机器人的工作环境进行仿真,也可对机器人进行逆运动学控制。Polygerinos[16]提出了针对线性增强型气压执行器的分析模型,该模型可用于基于超弹性材料的加压流体执行器,为软体执行器的设计提供了理论支持。拉线软体执行器有较多的建模方法[97],这些方法允许曲率产生变化,如雅克比法和神经网络法[53,98]等。
此外,根据软体手具体的工作环境和操作对象的不同,也可利用材料本身的性质与试验数值分析方法建立执行器的作动输出与输入的函数关系。由于软体材料的变形具有非线性、涉及多学科交叉等问题,因此对其进行精确的建模还需要进一步的尝试。
3.2 果蔬采摘装置的控制
装置的灵活性对于果蔬采摘工作至关重要,而果蔬采摘机械手能够像人手一样灵活的抓取和采摘离不开控制系统[99]。果蔬采摘机械手的控制通常可以分3层:单手指控制层、多手指协调运动控制层和目标轨迹跟踪层[100]。
机械手对目标果蔬进行抓取时,其指尖的位置信息和力信息是控制系统必要的反馈信息。因此,基于刚性元件的控制系统,对于反馈信息的实时性和精确度有较高的要求,这就增加了控制系统的难度。近年来,国内外学者在软体手的闭环控制相关研究方面进行了很多探索,如Fei等[101]首次提出了由4个柔性传感器组成的闭环反馈控制系统,并在滚动软体机器人中得到了应用;Kang等[102]设计了利用惯导 IMU(inertial measurement unit)监控气动肌肉动作的闭环控制系统。因此,对于软体手的运动控制,可利用微型或柔性传感器反馈关节角度,结合自适应控制率,实现软体手适应采摘果蔬大小和形状的抓取作业。软体手的柔顺性允许其通过形变适应形状不同或不确定的采摘对象,降低了对末端执行器输出力控制的要求,简化了软体手的控制[103]。根据果蔬果皮特点的差异,所选择的控制方式也不相同。开环控制方式可充分利用材料的柔顺性降低输出力的控制精度,适合操作像白菜、苹果和梨等外皮有一定耐压能力的果蔬;而像草莓、葡萄等外皮较为脆软的果蔬选择闭环控制更为安全。
软体手的控制系统具有一定的开放性,可在不同的机器人本体上得到应用和扩展[104]。然而,软体手具有无限的自由度与有限的执行器,使得控制计算量比较大,无法实现精确和实时控制,因而还没有适用于软体机器人的通用控制理论[82],因此还需对果蔬采摘中的控制算法进行深入研究。
4 果蔬采摘装置的发展趋势
近年来国内外学者围绕果蔬采摘技术做了很多研究,研制出了多种果蔬采摘机械手,但大多数由于采摘专一性高、效率低、损坏率高、装置复杂和造价昂贵等因素未能实现真正的商业化,缺少实用价值。因此,针对果蔬生长的特点,果蔬采摘装置需要具备采摘效率高、损坏率低、结构简单和成本低等特性。采用软体手作为果蔬采摘机器人的末端执行器可较理想地满足果蔬采摘的需求。但软体手也需要刚性材料作为支撑完成采摘作动。因此,随着研究的快速发展,基于单一材料的采摘装置将会逐步受限,取而代之的将是结合智能材料、生物材料等多种材料的复合体[105]。同时要考虑到如果采摘手的柔顺性过高,在遇到枝叶等稠密障碍物时,执行器易发生弯曲从而造成抓取失败,这意味着果蔬采摘装置须具备良好的柔顺性、较高的通用性和感知能力。因此,通过刚性和柔性材料融合的“共融技术”,利用信息融合理论建立果蔬采摘控制策略,实现柔顺性采摘,是未来果蔬采摘装置的主要发展趋势。随着微型传感器和电子皮肤[106-107]等技术的发展,多技术融合的智能化果蔬采摘软体手将是未来果蔬采摘机械手的发展方向。
此外,由于果实的随机性和所处的非结构环境,自然生长的果实并不利于末端执行器进行采摘作业。因此,为了提高生产效率,可通过改进果实的栽植方式、对采摘的果树进行适当的修剪[6]以及搭建支架等方式以便于末端执行器高效、准确的对果实进行采摘。
5 结论与展望
目前,大部分果蔬采摘机械手依然采用传统的刚性机械手或欠驱动机械手,控制精度要求高、操作难度大、通用性差,不能有效地实现对多种果蔬的无损采摘。新一代软体操作手具有较高的灵活性和环境适应性,在农产品的抓取和采摘作业中具有广泛的应用前景。利用软体手作为果蔬采摘机器人的末端执行器,为果蔬的无损采摘提供了新的解决方案,同时也有利于软体机器人的发展。尽管在软体手的建模、控制和应用方面还有很多问题需要解决,但它已经带来了现代果蔬采摘机械手发展的新契机。
本文通过对几种常见软体手的结构特点和作动方式的对比分析,发现气动软体手和介电弹性软体手能够更好地克服果蔬采摘的难点。气动软体手的作动特点较好地符合了理想果蔬采摘机械手的要求,能够实现对果蔬的包络和无损采摘,并且具有控制简单、操作容易、安全性高等特点。不仅如此,气动软体手简单的结构更容易让果农接受和使用,因此气动软体手有望更好地应用于果蔬采摘作业中。
软体手涉及材料、化学、机械等多学科交叉,对它的研究刚刚起步,尚需要对设计、控制和制造方法进行进一步研究。首先,软体手的驱动方式还不够完善,如气动驱动和拉线驱动均要外接笨重的驱动源、SMA和EAP受自身材料特性的限制存在驱动力不足等问题。可利用新型的智能材料、生物材料研制出可适应被抓取果蔬的变刚度软体手。其次,对软体手的设计方法并未实现统一,缺乏相关理论的指导。而且软体结构不同于传统刚性机械结构,虽然可通过三维计算机软件辅助建模,然而对于复杂的软体结构需要进行分段或分层设计,或是提出新的设计方法。最后,研究适合软体手的建模和控制方法是十分重要的一个环节。对于软体结构有限驱动器对应无限自由度的特点,要实现精确的建模和控制是十分复杂的。现有的建模技术在实际中难以应用,特别是软体手的柔顺性使得动力学建模很难满足控制的要求。
面向果蔬采摘的软体手是农业装备技术与软体机器人的交叉融合,说明农业装备技术正朝着人-机器-环境共融的方向发展,因此软体手在果蔬采摘中的应用将使果蔬的无损采摘成为可能。
[参 考 文 献]
[1] 徐丽明,张铁中. 果蔬果实收获机器人的研究现状及关键问题和对策[J]. 农业工程学报,2004,20(5):38-42.Xu Liming, Zhang Tiezhong. Present situation of fruit and vegetable harvesting robot and its key problems and measures in application[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(5): 38-42. (in Chinese with English abstract)
[2] 彭磊. 欠驱动苹果采摘末端执行器研究和设计[D]. 南京:南京农业大学,2010.Peng Lei. Development of Under-actuated Manipulator for Apple Picking[D]. Nanjing: Nanjing Agricultural University,2010. (in Chinese with English abstract)
[3] 孔万德. 中国水果和蔬菜产业遵循食品安全要求的研究[M]. 北京:中国农业出版社,2006.
[4] 由海霞. 近十一年我国蔬菜播种面积的变化规律分析[J].北方园艺,2016,6(43):168-170.
[5] 王丽丽,郭艳玲,王迪,等. 果蔬采摘机器人研究综述[J]. 林业机械与木工设备,2009,37(1):10-14.Wang Lili, Guo Yanling, Wang Di, et al. Overview of study on fruit and vegetable picking robots[J]. Forestry Machinery and Woodworking Equipment, 2009, 37(1): 10-14. (in Chinese with English abstract)
[6] 汤修映,张铁中. 果蔬收获机器人研究综述[J]. 机器人,2005,27(1):90-96.Tang Xiuying, Zhang Tiezhong. Fruit and vegetable harvesting robot research review[J]. Robot, 2005, 27(1):90-96. (in Chinese with English abstract)
[7] Kataoka T, Murakami A, Duke M, et al. Estimating apple fruit locations for manipulation by apple harvesting robot[C]//IFAC Bio-Robotics,Information Technology and Intelligent Control for Bio-Production Systems, 2000,33(29): 67-72.
[8] 李秦川,胡挺,武传宇,等. 果蔬采摘机器人末端执行器研究综述[J]. 农业机械学报,2008,39(3):175-179.Li Qinchuan, Hu Ting, Wu Chuanyu, et al. Review of end-effector in fruit and vegetable haresting robot[J].Transactions of the Chinese Society for Agricultural Machinery, 2008, 39 (3): 175-179. (in Chinese with English abstract)
[9] 宋健,张铁中,徐丽明,等. 果蔬采摘机器人研究进展与展望[J]. 农业机械学报,2006,37(5):158-162.Song Jian, Zhang Tiezhong, Xu Liming, et al. Research actuality and prospect of picking robot for fruits and vegetables[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5): 158-162. (in Chinese with English abstract)
[10] 方建军. 移动式采摘机器人研究现状与进展[J]. 农业工程学报,2004,20(2):273-278.Fang Jianjun. Present situation and development of mobile harvesting robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004,20(2): 273-278. (in Chinese with English abstract)
[11] Baeten J, Donné K, Boedrij S, et al. Autonomous fruit picking machine: A robotic apple harvester[J]. Springer Tracts in Advanced Robotics, 2008, 42: 531-539.
[12] 汤修映. 果蔬收获机器人系统的研究[D]. 北京:中国农业大学,2006.Tang Xiuying. The Study of Harvesting Robot System for Fruit and Vegetable[D]. Beijing: China Agricultural University,2006. (in Chinese with English abstract)
[13] 谢春. 欠驱动三指手采摘装置的设计与抓取研究[D]. 镇江:江苏大学,2013.Xie Chun. Design and Grab Research on Picking-device Based on Underactuated Three-fingered Hand[D]. Zhenjiang:Jiangsu University, 2013. (in Chinese with English abstract)
[14] 胡挺. 果蔬采摘机器人机械系统设计与关键技术研究[D]. 杭州:浙江理工大学,2009.Hu Ting. Research on Mechanical System Design and Key Technology of a Fruit-vegetable Harvesting Robot[D].Hangzhou:Zhejiang Sci-Tech University, 2009. (in Chinese with English abstract)
[15] 王燕,,杨庆华,鲍官军. 关节型果蔬采摘机械臂优化设计与试验水[J]. 农业机械学报,2011,42(7):191-195.Wang Yan, Yang Qinghua, Bao Guanjun. Optimization design and experiment of fruit and vegetable picking manipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(7): 191-195. (in Chinese with English abstract)
[16] Polygerinos P, Wang Z, Overvelde J T B, et al.Modeling of soft fiber-reinforced bending actuators[J].IEEE Transactions on Robotics, 2015, 31(3): 778-789.
[17] Festo. Freshly picked-harvesting with robots[EB/OL].[2014-09-26].https://www.festo.com/group/en/cms/10382.html.
[18] Arima M, Kondo T, Shibano Y, et al. Studies on cucumber harvesting robot:(Part 2) Manufacture of hand based on physical properties of cucumber plant and basic experiment to harvest[J]. Journal of the Japanese Society of Agricultural Machinery, 1994, 56: 69-76.
[19] Ling P P, Ehsani R, Ting K C, et al. Sensing and end-effector for a robotic tomato harvester[J]. ASAE Annual International Meeting, 2004: 1-12.
[20] 金波,林龙贤. 果蔬采摘欠驱动机械手爪设计及其力控制[J]. 机械工程学报,2014,50(19):1-7.Jin Bo, Lin Longxian. Design and force control of underactuated manipulator of fruit and vegetable picking[J]. Journal of Mechanical Engineering, 2014, 50 (19): 1-7. (in Chinese with English abstract)
[21] 张立彬,杨庆华,胥芳,等. 机器人多指灵巧手及其驱动系统研究的现状[J]. 农业工程学报,2004,20(3):271-275.Zhang Libin, Yang Qinghua, Xu Fang, et al. Review of research on multi-fingered robot hand and its driving system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004,20(3): 271-275. (in Chinese with English abstract)
[22] Hughes J, Culha U, Giardina F, et al. Soft manipulators and grippers: A review[J]. In Robotics and AI, 2016, 3(69):1-12.
[23] Rus D, Tolley M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475.
[24] Bogue R. Flexible and soft robotic grippers: The key to new markets?[J]. Industrial Robot, 2016, 43(3): 258-263.
[25] Wang L, Iida F. Deformation in soft-matter robotics: A categorization and quantitative characterization[J]. Robotics& Automation Magazine IEEE, 2015, 22(3): 125-139.
[26] Elango N, Faudzi A A M. A review article: Investigations on soft materials for soft robot manipulations[J].International Journal of Advanced Manufacturing Technology,2015, 80(5-8): 1027-1037.
[27] Marvi H, Gong C, Gravish N, et al. Sidewinding with minimal slip: Snake and robot ascent of sandy slopes[J].Science (New York, N.Y.), 2014, 346(6206): 224.
[28] Baisch A T, Sreetharan P S, Wood R J. Biologicallyinspired locomotion of a 2g hexapod robot[C]// IEEE/rsj International Conference on Intelligent Robots and Systems.IEEE,2010: 5360-5365.
[29] Elphick M R, Melarange R. Neural control of muscle relaxation in echinoderms[J]. Journal of Experimental Biology, 2001, 204(5): 875-885.
[30] 曹玉君,尚建忠,梁科山,等. 软体机器人研究现状综述[J]. 机械工程学报,2012,48(3):25-33.Cao Yujun, Shang Jianzhong, Liang Keshan, et al. Review of soft-bodied robots[J]. Journal of Mechanical Engineering,2012, 48 (3): 25-33. (in Chinese with English abstract)
[31] Rolf M, Steil J J. Constant curvature continuum kinematics as fast approximate model for the bionic handling assistant[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2012: 3440-3446.
[32] Andrikopoulos G, Nikolakopoulos G, Manesis S. A survey on applications of pneumatic artificial muscles[C]// Control& Automation. IEEE,2011: 1439-1446.
[33] Lei J, Huangying Y U, Wang T. Dynamic bending of bionic flexible body driven by pneumatic artificial muscles(PAMs) for spinning gait of quadruped robot[J].Chinese Journal of Mechanical Engineering, 2016, 29(1):11-20.
[34] Polygerinos P, Lyne S, Wang Z, et al. Towards a soft pneumatic glove for hand rehabilitation[C]// IEEE/rsj International Conference on Intelligent Robots and Systems.IEEE, 2014: 1512-1517.
[35] Wehner M, Truby R L, Fitzgerald D J, et al. An integrated design and fabrication strategy for entirely soft,autonomous robots[J]. Nature, 2016, 536(7617): 451-455.
[36] Bartlett N W, Tolley M T, Overvelde J T, et al. Soft robotics: A 3D-printed, functionally graded soft robot powered by combustion[J]. Science (New York, N.Y.),2015, 349 (6244): 161-l65.
[37] 王田苗,郝雨飞,杨兴帮. 软体机器人:结构、驱动、传感与控制[J]. 机械工程学报,2017,53(13): 1-12.Wang Tianmiao, Hao Yufei, Yang Xingbang. Soft robotics:structure, actuation, sensing and control[J]. Journal of Mechanical Engineering, 2017, 53(13): 1-12. (in Chinese with English abstract)
[38] Ge Q, Sakhaei A H, Lee H, et al. Multimaterial 4D printing with tailorable shape memory polymers[J]. Scientific Reports, 2016, 6: 1-11.
[39] Suzumori K, Iikura S, Tanaka H. Applying a flexible microactuator to robotic mechanisms[J]. IEEE Control Systems, 1992, 21(1): 21-27.
[40] 王志恒. 基于 FPA的新型气动机器人多指灵巧手研究[D]. 杭州:浙江工业大学,2011.Wang Zhiheng. New Robot Multi-fingered Dexterous Hand Based on the Flexible Pneumtatic Actuator[D]. Hangzhou:Zhejiang University of Technology, 2011. (in Chinese with English abstract)
[41] Hao Y, Gong Z, Xie Z, et al. Universal soft pneumatic robotic gripper with variable effective length[C]// Control Conference. IEEE,2016: 6109-6114.
[42] Galloway K C, Becker K P, Phillips B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3(1): 23-33.
[43] Wang H, Zhu Y, Zhao D, et al. Performance investigation of cone dielectric elastomer actuator using taguchi method[J]. Chinese Journal of Mechanical Engineering, 2011,24(4): 685-692.
[44] Shintake J, Rosset S, Schubert B, et al. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators[J]. Advanced Materials,2016, 28(2): 1-28.
[45] Shen Q, Trabia S, Stalbaum T, et al. A multiple-shape memory polymer-metal composite actuator capable of programmable control, creating complex 3D motion of bending, twisting, and oscillation[J]. Scientific Reports,2016, 6: 1-11.
[46] 郭闯强,吴春亚,刘宏. 离子聚合物金属复合材料驱动器在机器人中的应用进展[J]. 机械工程学报,2017,53(9):1-13.Guo Chuangqiang, Wu Chunya, Liu Hong. Application progress of ionic polymer-metal composite actuators in robots[J]. Journal of Mechanical Engineering, 2017, 53(9):1-13. (in Chinese with English abstract)
[47] Cecilia L, Matteo C, Barbara M, et al. Soft robot arm inspired by the octopus[J]. Advanced Robotics, 2012, 26(7):709-727.
[48] Firouzeh A, Salerno M, Paik J. Soft pneumatic actuator with adjustable stiffness layers for multi-DoF actuation[C]//IEEE/rsj International Conference on Intelligent Robots and Systems. IEEE, 2015: 1117-1124.
[49] Trivedi D, Rahn C D, Kier W M, et al. Soft robotics:Biological inspiration, state of the art, and future research[J]. Applied Bionics & Biomechanics, 2008, 5(3):99-117.
[50] Muscato G, Prestifilippo M, Abbate N, et al. A prototype of an orange picking robot: Past history, the new robot and experimental results[J]. Industrial Robot an International Journal, 2005, 32(2):128-138.
[51] Excell J. Fruit-picking robot solves automation challenge[EB/OL]. [2015-10-16].https://www.theengineer.co.uk/fruitpicking-robot-solves-automation-challenge/.
[52] Pothering J. TortgaAgTech raises $2.4 million for strawberry-picking robots[EB/OL]. [2017-12-13]. https://news.impactalpha.com/tortgaagtech-raises-2-4-million-forstrawberry-picking-robots-d211028ac06f.
[53] 张进华,王韬,洪军,等. 软体机械手研究综述[J]. 机械工程学报,2017,53(13): 19-28.Zhang Jinhua, Wang Tao, Hong Jun, et al. Review of soft-bodied manipulator[J]. Journal of Mechanical Engineering,2017, 53(13): 19-28. (in Chinese with English abstract)
[54] Chou C P, Hannaford B. Measurement and modeling of McKibben pneumatic artificial muscles[J]. IEEE Transactions on Robotics and Automation,1996,12(1): 90-102.
[55] Daerden F, Lefeber D. Pneumatic artificial muscles:Actuators for robotics and automation[J]. European Journal of Mechanical & Environmental Engineering, 2000, 47(1):10-21.
[56] Polygerinos P, Wang Z, Galloway K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J].Robotics & Autonomous Systems, 2014, 73: 135-143.
[57] Yap H, Kamaldin N, Lim J, et al. A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging[J]. IEEE Transactions on Neural Systems& Rehabilitation Engineering A Publication of the IEEE Engineering in Medicine & Biology Society, 2016, 25(6):782-793.
[58] 徐淼鑫. 气压驱动软体夹持装置研究[D]. 南京:南京理工大学,2015.Xu Miaoxin. Research on Pneumatic Drive Soft Gripper Device[D]. Nanjing:Nanjing University of Science and Technology, 2015. (in Chinese with English abstract)
[59] Marchese A D, Katzschmann R K, Rus D. A recipe for soft fluidic elastomer robots[J]. Soft Robotics, 2015, 2(1): 7-25.
[60] Faudzi A A M, Razif M R M, Nordin I N A M, et al.Development of bending soft actuator with different braided angles[C]// IEEE/ASME International Conference on Advanced Intelligent Mechatronics. IEEE, 2012, 43(12):1093-1098.
[61] Davis S, Caldwell D G. Braid effects on contractile range and friction modeling in pneumatic muscle actuators[M].California: SagePublications, 2006.
[62] Scaff W, Hirakawa A R, Horikawa O. Non-conducting manipulator for live-line maintenance: Use of pneumatic artificial muscles[C]// International Conference on Applied Robotics for the Power Industry. IEEE, 2015: 1-6.
[63] Hiller J, Lipson H. Automatic design and manufacture of soft robots[J]. IEEE Transactions on Robotics, 2012, 28(2):457-466.
[64] Shepherd R F, Ilievski F, Choi W, et al. Multigait soft robot[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51): 20400-20403.
[65] Galloway K C, Polygerinos P, Walsh C J, et al.Mechanically programmable bend radius for fiberreinforced soft actuators[C]// International Conference on Advanced Robotics. IEEE, 2013: 1-6.
[66] 费燕琼,庞武,于文博. 气压驱动软体机器人运动研究[J]. 机械工程学报,2017,53(13):14-18.Fei Yanqiong, Pang Wu, Yu Wenbo. Movement of air-driven soft robot[J]. Journal of Mechanical Engineering,2017, 53 (13): 14-18. (in Chinese with English abstract)
[67] Li Y, Chen Y, Yang Y, et al. Passive particle jamming and its stiffening of soft robotic grippers[J]. IEEE Transactions on Robotics, 2017, 33(2): 446-455.
[68] Marchese A D, Onal C D, Rus D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1(1): 75-87.
[69] Wang Z, Polygerinos P, Overvelde J, et al. Interaction forces of soft fiber reinforced bending actuators[J]. IEEE/ASME Transactions on Mechatronics, 2016, 22(2): 717-727.
[70] Harvard Biodesign Lab. Soft robotics toolkit[EB/OL].[2017-09-07]. https://softroboticstoolkit.com/book/pneunetsdesign.
[71] Charluet C. Soft robotics will pick fruit with finesse and save your life too[EB/OL]. [2017-10-19]. https://thenextweb.com/artificial-intelligence/2017/10/19/soft-robo tics-a-new-breed-of-robots-with-a-softer-touch/.
[72] Soft Robotics Inc. Receives 2015 game changer award[EB/OL]. [2015-09-28]. https://www.prlog.org/1249 6904-soft-robotics-inc-receives-2015-game-changer-award.html.
[73] 王超. 线驱动硅胶软体机械臂建模与控制[J]. 上海:上海交通大学,2015.Wang Chao. Dynamics and Control of Cable-Driven Silicone Soft Manipulator[D]. Shanghai: Shanghai Jiaotong University, 2015. (in Chinese with English abstract)
[74] In H, Lee H, Jeong U, et al. Feasibility study of a slack enabling actuator for actuating tendon-driven soft wearable robot without pretension[C]//IEEE International Conference on Robotics and Automation, 2015: 1229-l234.
[75] Manti M, Hassan T, Passetti G, et al. A bioinspired soft robotic gripper for adaptable and effective grasping[J].Soft Robotics, 2015, 2(3): 107-116.
[76] Mishra A K, Dottore E D, Sadeghi A, et al. Simba:Tendon-driven modular continuum arm with soft reconfigurable gripper[J]. Frontiers in Robotics and AI,2017, 4(4): 1-10.
[77] Shu S G, Lagoudas D C, Hughes D, et al. Modeling of a flexible beam actuated by shape memory alloy wires[J].Smart Materials & Structures, 1997, 6(3):265-277.
[78] Xiang C, Yang H, Sun Z, et al. The design, hysteresis modeling and control of a novel SMA-fishing-line actuator[J]. Smart Material Structures, 2017, 26(3): 1-14.
[79] Kim H I, Han M W, Song S H, et al. Soft morphing hand driven by SMA tendon wire[J]. Composites Part B Engineering, 2016, 105:138-148.
[80] Yamano M, Goto D, Ujiie K, et al. Experiments of a variable stiffness robot using shape memory gel[C]// IEEE/sice International Symposium on System Integration. IEEE,2013: 647-652.
[81] 史震云,朱前成. 基于智能驱动器的软体机器人系统[J].北京航空航天大学学报,2016,42(12): 2596-2602.Shi Zhenyun, Zhu Qiancheng. Soft robot system based on Intelligent driver[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(12): 2596-2602.(in Chinese with English abstract)
[82] O’Halloran A, O’Malley F, Mchugh P. A review on dielectric elastomer actuators, technology, applications, and challenges[J]. Journal of Applied Physics, 2008, 104(7):1-10.
[83] 何斌,王志鹏,唐海峰. 软体机器人研究综述[J]. 同济大学学报,2014,42(10): 1596-1603.He Bin, Wang Zhipeng, Tang Haifeng. Review of soft robot[J]. Journal of Tongji University 2014, 42(10): 1596-1603. (in Chinese with English abstract)
[84] Pelrine R, Kornbluh R, Pei Q, et al. High-speed electrically actuated elastomers with strain greater than 100%[J].Science, 2000, 287(5454): 836-839.
[85] Ahmed S, Ounaies Z, Lanagan M T. On the impact of self-clearing on electroactive polymer (EAP) actuators[J].Smart Materials & Structures, 2017, 26(10): 1-13.
[86] Gonzalez M A. An investigation of electrochemomechanical actuation of conductive Polyacrylonitrile (PAN) nanofiber composites[C]// Electroactive Polymer Actuators and Devices. International Society for Optics and Photonics,2014, 9056(4): 1-11.
[87] Mirfakhrai T, Madden J D W, Baughman R H. Polymer artificial muscles[J]. Materials Today, 2007, 10(4):30-38.
[88] Suo Zhigang. Theory of dielectric elastomers[J]. Chinese Journal of Solid Mechanics, 2010, 23(6): 549-578.
[89] Shea P, Floreano P. Intrinsic electro-adhesion for soft DEA-based grippers[EB/OL]. [2017-08-03]. https://lmts.e pfl.ch/electroadhesion.
[90] Kornbluh R. Soft robots are reshaping the future of robotics[EB/OL]. [2015-03-24]. https://www.sri.com/blog/soft-robots-are-reshaping-future-robotics.
[91] 邓韬. 面向心脏微创手术的软体机器人系统研究[D]. 上海:上海交通大学,2014.Deng Tao. Development of a Soft Robotic System for Minimally Invasive Cardiac Surgery[D]. Shanghai:Shanghai Jiaotong University, 2014. (in Chinese with English abstract)
[92] 王新忠. 温室番茄收获机器人选择性收获作业信息获取与路径规划研究[D]. 镇江:江苏大学,2012.Wang Xinzhong. Studies on Information Acquisition and Path Planning of Greenhouse Tomato Harvesting Robot with Selective Harvesting Operation[D]. Zhenjiang:Jiangsu University, 2012. (in Chinese with English abstract)
[93] 李铁风,李国瑞,梁艺鸣,等. 软体机器人结构机理与驱动材料研究综述[J]. 力学学报,2016,48(4):756-766.Li Tiefeng, Li Guorui, Liang Yiming, et al. Review of materials and structures in soft robotics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2016, 48 (4): 756-766. (in Chinese with English abstract)
[94] Jones B A, Walker I D. Kinematics for multisection continuum robots[J]. IEEE Transactions on Robotics, 2006,22(1): 43-55.
[95] Webster Iii R J, Jones B A. Design and kinematic kodeling of constant curvature continuum robots: A review[J].International Journal of Robotics Research, 2010, 29(13):1661-1683.
[96] Duriez C, Bieze T. Soft Robot Modeling, Simulation and Control in Real-Time[M]. Paris: Springer International Publishing, 2017.
[97] Camarillo D B, Milne C F, Carlson C R, et al. Mechanics modeling of tendon-driven continuum manipulators[J].IEEE Transactions on Robotics, 2008, 24(6): 1262-1273.
[98] Giorelli M, Renda F, Ferri G, et al. A feed-forward neural network learning the inverse kinetics of a soft cable-driven manipulator moving in three-dimensional space[C]//IEEE/rsj International Conference on Intelligent Robots and Systems. IEEE,2013: 5033-5039.
[99] Marry P M. Control primitive for robot systems[J]. IEEE Transactions on System, Man and Cybernetics, 2002, 22(1):183-193.
[100] 陈利兵. 草莓收获机器人采摘系统研究[D]. 北京:中国农业大学,2005.Chen Libing. The Study of Picking System of Strawberry-Harvesting Robots[D]. Beijing: China Agricultural University,2005. (in Chinese with English abstract)
[101] Fei Y, Xu H. Modeling and motion control of a soft robot[J]. IEEE Transactions on Industrial Electronics, 2017,64(2): 1737-1742.
[102] Kang B S, Park E J. Modeling and control of an intrinsic continuum robot actuated by pneumatic artificial muscles[C]// IEEE International Conference on Advanced Intelligent Mechatronics. IEEE, 2016: 1157-1162.
[103] Laschi C, Cianchetti M. Soft robotics: New perspectives for robot bodyware and control[J]. Frontiers in Bioengineering& Biotechnology, 2014, 2(7): 1-5.
[104] 陈磊,陈帝伊,马孝义. 果蔬采摘机器人的研究[J]. 农机化研究,2011,33(1):224-227.Chen Lei, Chen Diyi, Ma Xiaoyi. Researching on the fruit and vegetable haresting robot[J]. Journal of Agricultural Mechanization Research, 2011, 33(1): 224-227. (in Chinese with English abstract)
[105] 文力. 软体机器人的研究[EB/OL]. (2017-09-28)[2017-11-02]. https://zhuanlan.zhihu.com/p/30700859.
[106] Silvera-Tawil D, Rye D, Velonaki M. Artificial skin and tactile sensing for socially interactive robots: A review[J].Robotics & Autonomous Systems, 2015, 63(3): 230-243.
[107] Park Y L, Chen B R, Wood R J. Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors[J]. IEEE Sensors Journal, 2012, 12 (8):2711-2718.
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
水道港口(2022年2期)2022-07-04
上海交通大学学报(2021年2期)2021-03-02
哈尔滨轴承(2020年3期)2021-01-26
装备制造技术(2020年4期)2020-12-25
军事文摘(2020年24期)2020-11-29
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2019年8期)2019-09-03
汽车维修技师(2019年2期)2019-08-23