
自适应网格跟踪微分器设计
2018-06-07 08:04徐秋坪常思江王中原
系统工程与电子技术 2018年6期
徐秋坪, 常思江, 王中原
(南京理工大学能源与动力工程学院, 江苏 南京 210094)
0 引 言
跟踪微分器(tracking differentiator, TD)[1]是由韩京清等人提出的对连续信号进行跟踪并对其微分信号进行估计的数值算法。它具备良好的跟踪性能和抗干扰能力, 已成功应用于控制器设计和信号处理。TD具有多种形式。文献[2]中提出一种全程快速非线性TD,但跟踪结果存在一定的颤振现象。为此,文献[3]综合线性TD和非线性TD的优点,提出了一种改进的非线性TD。文献[4]详细推导了离散系统真正的最速控制综合函数,并指出fhan函数只是离散系统最速控制综合函数的一种简化。文献[5-8]分别基于sigmoid函数、反正切函数、反双曲正弦函数、双曲正弦函数等设计了非线性TD。文献[9]则利用双曲正切函数和反双曲正弦函数共同构造了二阶非线性TD的加速度函数。文献[10-11]对分数阶TD进行了深入研究。文献[12]对4种先进的TD设计技术:全局鲁棒精确微分器[13]、混合连续非线性微分器[14]、鲁棒精确一致收敛的任意阶微分器[15]和基于泰勒级数展开的微分器[16]进行了对比分析。不同类型的TD的结构和参数调控的复杂性不同。考虑处理输入信号的系统结构复杂性,本文则以二阶离散形式TD[17]为研究基础。对于此TD,针对不同的研究问题,不少学者也取得了一些成果。
针对TD滤波产生相位损失的情况,文献[18]通过引入相位调节基因,提出了一种新的最优控制综合函数,而传统的离散最优TD是新的TD(当基因等于零时)的特例。文献[19]研究了信号相位损失与TD各参数及输入信号频率之间的关系,并基于Lagrange插值理论,给出了近似的函数方程。考虑参数固定的TD在被跟踪信号发生大幅度变化时跟踪品质会产生退化的情况,文献[20]提出了依据跟踪信号与输入信号的间距去控制速度因子的线性自适应函数,一定程度上提高了TD的跟踪性能。但是当输入被噪声干扰时,输出很容易引起大的振荡。因此,文献[21]利用sigmoid函数作为速率开关函数控制速度因子对上述TD进行了改进。该算法能抑制输入信号低速变化时的振荡,但仍存在一定程度的相位滞后。文献[22]则同时考虑速度因子和滤波因子,提出了控制速度因子和滤波因子变化的概率函数。但是概率函数由跟踪信号的微分来控制,一旦混杂噪声则会影响其跟踪性能。因此,文献[23]做了进一步的研究,提出了将跟踪间距的滑动窗口标准差估计作为输入的自适应函数来调整滤波因子和速度因子的改进自适应TD。这些文献都是围绕输入信号存在噪声的情况下对TD的改进研究。
在工程实践应用时,通常需要对离散输入信号进行处理(比如轨迹优化时生成的离散舵机偏转指令、飞行器规避飞行的离散障碍点信号等),以安排合理的过渡过程。若直接采用传统的离散TD(尤其当离散输入信号存在大幅度变化时),会产生较大的跟踪误差。对于传统的离散TD,其控制参数为滤波因子和速度因子,在处理大幅度变化的离散输入信号时,如何设置这两个参数既能够实现精确跟踪又能保证无相位损失是一个值得研究的课题。针对上述问题,本文保持传统的离散TD结构不变(避免引入较多的控制参数同时保障算法结构简单),提出了一种基于自适应网格调节控制参数的TD。其思想为:首先根据任务要求的过渡过程时间将整个跟踪过程分为两个阶段,上升段和稳定段;将滤波因子和速度因子扩张成二维网格,并引入预设步长和速度修正因子两个变量来细化网格;根据跟踪误差是否满足精度要求来判断是否需要重新划分网格。通过若干案例仿真表明,提出的自适应网格TD可有效地处理大幅度变化的离散输入信号,既能够满足精度要求又能保障无相位损失,且对于连续信号的处理同样具备此优点,可为TD的实际应用提供一定的参考价值。
1 问题描述
由韩京清教授提出的离散形式最速TD[2]为
(1)
式中,h为步长;v0为输入信号;r,h0分别为速度因子和滤波因子,均为TD控制参数;输入信号不需要滤波时则有h0=h;v1,v2为TD的两个状态,v1表征TD为v0安排的过渡过程,当v1近似于v0时,v2可视为输入信号的微分。函数fhan(x1,x2,r0,h0)的具体形式如下:
(2)
式中,sign(x)为符号函数。
TD的性能主要通过调整速度因子r和滤波因子h0来调节。速度因子越大则系统的跟踪速度越快,滤波因子越大则会增加相位损失。

(3)

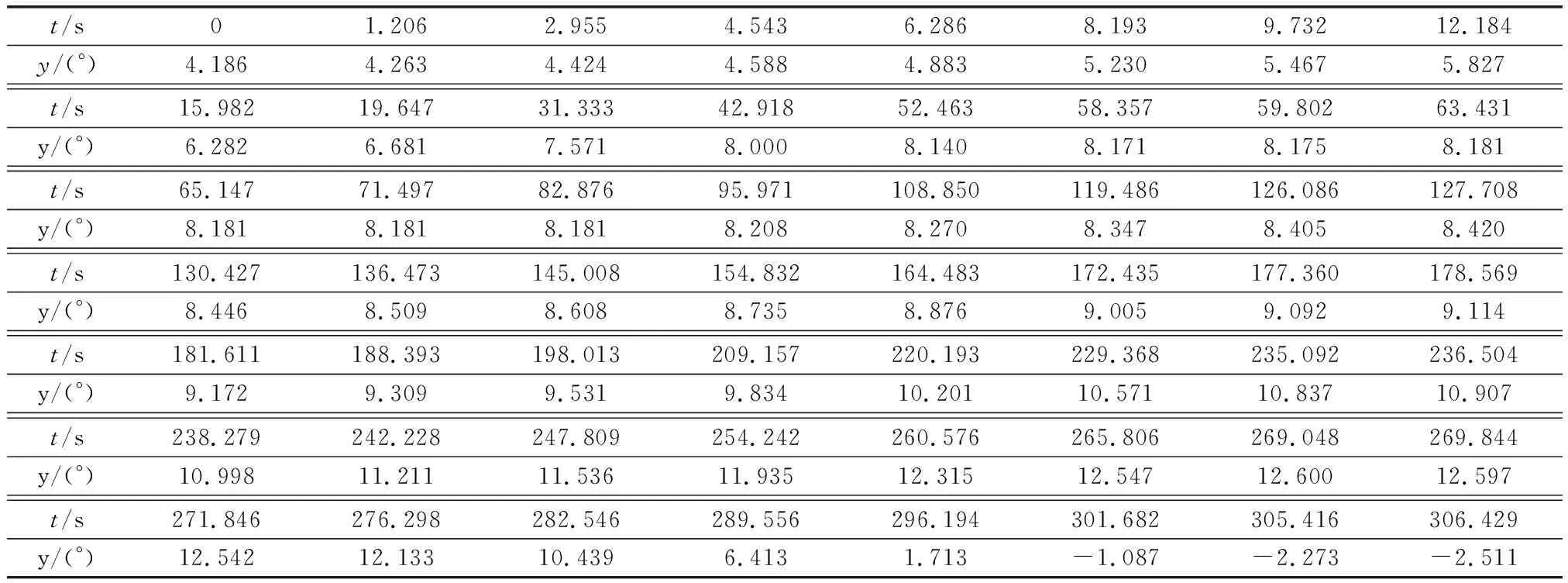
表1 离散输入信号

图1 TD和ATD的跟踪效果Fig.1 Tracking effects of TD and ATD
2 自适应网格跟踪微分器
针对上述问题,本文在传统的离散TD的基础上,采用自适应网格方法调节参数h0和r,设计自适应网格跟踪微分器(adaptive mesh tracking differentiator, AMTD)。其结构与TD相同,其输出状态仍用v1和v2表示。AMTD的主要思想为:将离散输入信号划分两段(见图2),前段使得输出状态v1在预设过渡过程时间Td附近无超调精确地跟踪上输入信号v0,后段则是在前段达到跟踪精度要求之后才激活的,它使得TD的输出能够对输入信号v0保持精确的稳态跟踪,这样有利于减小计算量。

图2 离散点输入的分段图Fig.2 Subsection diagram of discrete inputs
在相邻离散输入信号之间划分网格,设计TD参数。采用拉格朗日插值法求取所划分的各网格点处的虚拟输入信号,并代入TD计算各离散输入信号点对应的跟踪值并判断其是否满足设定的计算精度。若不满足精度要求,则需进一步细化网格,调节参数,直到跟踪精度满足设计要求为止。具体的设计过程描述如下:
(1) 根据任务需求,预设过渡过程时间Td,将输入信号分成了两部分。第一部分为从初始时刻T0到Td后第一个离散输入信号对应的时刻T1;第二部分为T1时刻到最后一个离散信号对应的时刻T2。
对于阶跃信号,r与设定值的幅值v0,达到设定值的过渡过程时间Td之间的关系为
(4)
式中,v10为TD的状态变量v1的初始值,一般为0。当输入不是阶跃信号时,若按照式(4)设定参数r,则实际的过渡过程时间和设定的Td值相差不大。因此,可利用式(4)描述的关系来设置参数r。引入速度修正因子k,则根据T1时刻的输入信号yT1和预设Td可设计第一段的参数r1:
(5)
k的初始值为1。k=1表示对过渡过程时间无修正,k>1时说明增加了过渡过程时间,减小了r1;k<1时说明减小了过渡过程时间,增大了r1。
(2) 初划网格。预设步长hp。若区间[ti,ti+1]的长度是hp的整数倍,则该区间被划分成了(ti+1-ti)/hp个子区间;若区间[ti,ti+1]的长度不是hp的整数倍,那么该区间被划分成了fix((ti+1-ti)/hp)个长度为hp的等距子区间和1个长度为hpl=ti+1-ti-hpni的子区间,其中fix(x) 为取整函数,如图3所示。此种情况下,需将长度为hpl的子区间扩展成长度为hp的虚拟子区间,将增设的虚拟网格点的跟踪值和区间[ti,ti+1]内最后一个网格点的跟踪值进行插值,以求得ti+1时刻的离散输入信号的跟踪值。

图3 网格划分示意图Fig.3 Division diagram of mesh points
(3) 采用拉格朗日插值算法求取区间[ti,ti+1]各网格点tii对应的虚拟输入信号yii:
(6)
式中,yi,yi+1,yi+2分别为ti,ti+1,ti+2对应的输入信号。若计算到最后一个离散区间时,则采用最后3个离散点信号进行插值计算。
(4) 判断上升段跟踪精度。将各网格点处的虚拟输入信号和上述设置的参数代入式(1)计算。T1时刻的跟踪误差为
(7)
式中,vT1对应T1时刻TD的输出状态v1。
预设过渡过程精度ε1。若ΔT1≤ε1,则满足计算精度;若ΔT1>ε1,则不满足精度要求,需要进一步细化网格。
(5) 网格细化策略。为保证跟踪的精度和快速性,将滤波因子和速度因子扩张成二维网格,通过预设步长hp和速度修正因子k来细化网格,进而调节h0和r。
预设步长细化度mp,它表征预设步长细化程度。当ΔT1>ε1,按如下规则细化预设步长:
hp,j+1=hp,j/mp
(8)
j表示细化次数,j=1时为初始设置的预设步长。mp值越大,预设步长越小,滤波因子网格越密。
预设速度因子修正度mk,表征k的修正程度,按如下规则细化速度修正因子:
kj+1=kj·(1+mk)
(9)
j=1时为初始设置的速度修正因子。取mk<0,则k呈指数减小,r的值呈指数增加。hp和k随网格细化次数的变化如图4所示。
网格细化策略如图5所示。当ΔT1>ε1时,若此时的控制参数为hp,1,k1。首先细化一次滤波因子网格,同时保持k不变,则控制参数变为hp,2,k1,第一次计算ΔT1,若ΔT1≤ε1则满足精度要求,进入下一步计算。若仍存在ΔT1>ε1,那么需细化一次速度因子网格,同时保持滤波因子网格细化前的预设步长hp不变,则控制参数变为hp,1,k2,再次计算ΔT1,若ΔT1≤ε1,则满足精度要求,进入下一步计算。若仍存在ΔT1>ε1,那么需同时细化一次滤波因子网格和速度因子网格,即采用第一步单独细化一次滤波因子网格得到的预设步长hp,2和第二步单独细化一次速度因子网格得到的k2进行第三次计算ΔT1,若ΔT1≤ε1,则满足精度要求,进入下一步计算。若仍存在ΔT1>ε1,那么以当前的参数hp,2,k2为基础,按照上述步骤依次交替地细化网格,直到ΔT1满足精度要求为止。
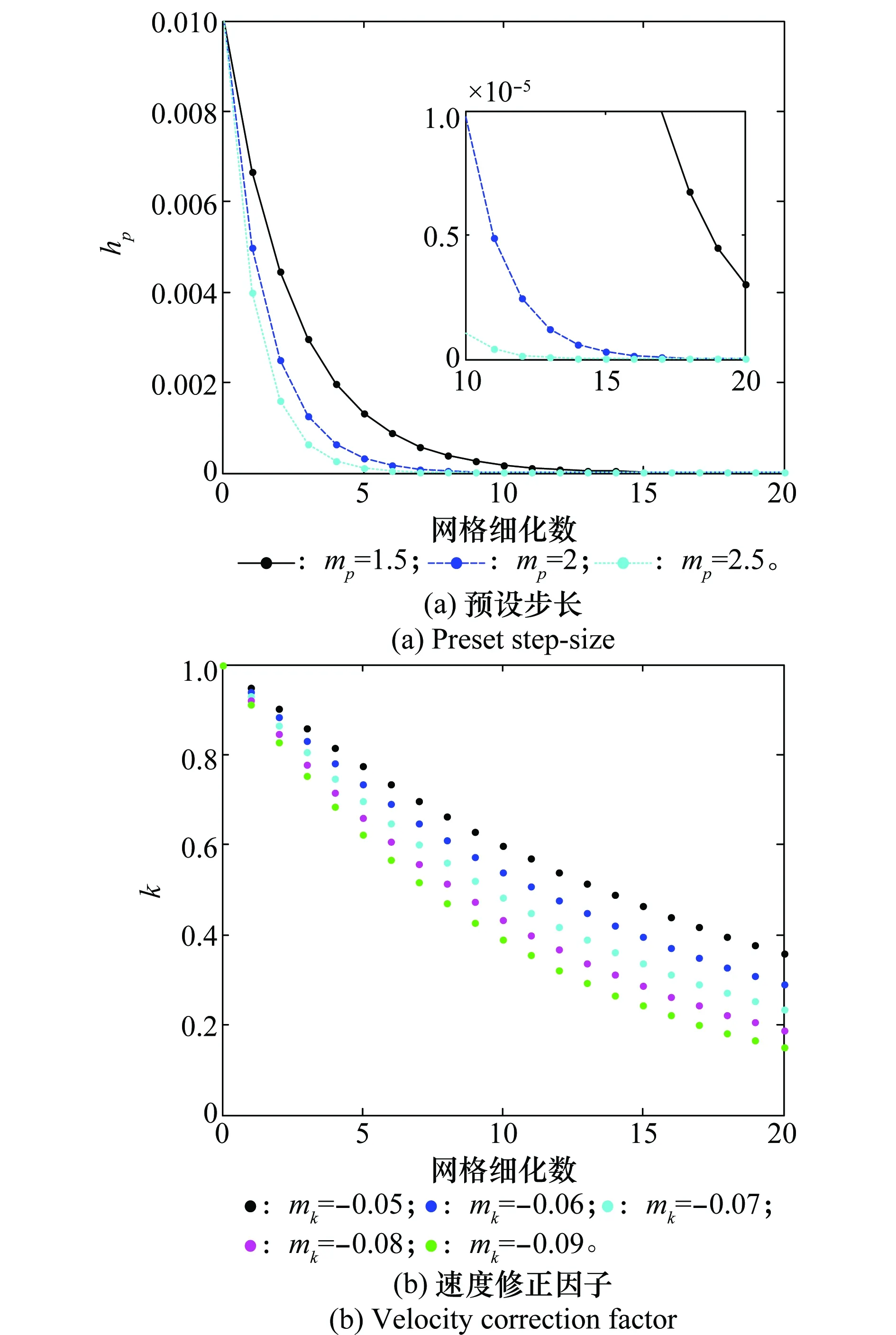
图4 hp和k随网格细化次数的变化规律Fig.4 Profiles of hp and k with the number of mesh refinement

图5 网格细化策略Fig.5 Scheme of mesh refinement
(6) 若T1时刻vT1满足预设的跟踪精度(ΔT1≤ε1),则进入[T1,T2]段的稳态跟踪。
为保障TD的一条很重要的性质:当v1很接近输入信号v0时,v2可视为其微分,以及保障后续离散信号的跟踪精度(尤其是在区间较短的相邻离散点处输入指令变化较大的时候),那么用设计的自适应网格TD计算[T1,T2]段的跟踪值时,将采用各离散子区间[ti,ti+1]内自适应划分网格的设计方式,这样输入信号各离散子区间的网格数可能是不同的。
预设Tdi表征[T1,T2]段的子区间[ti,ti+1]的过渡过程时间,则
(10)
ml可根据输入信号特征进行设定,ml越大,则Tdi越小,即跟踪速度越快。
v1i为ti时刻的输出跟踪值,yi+1为ti+1时刻的输入信号,参照式(5)计算该区间的参数ri
(11)
ki初始值为1。设定参数h0等于预设步长hp。
(7) 判别[T1,T2]段内各离散点的精度。[T1,T2]段与[T0,T1]段的计算过程相似,网格细化策略相同。区别在于:[T1,T2]段需要对每一个离散信号的跟踪误差进行判定,只有当上一个离散点满足跟踪精度要求后才能进入下一个离散信号的计算。
预设[T1,T2]段内各离散点处的跟踪误差为Δi,则
(12)
预设预设跟踪精度ε2。若ti+1时刻的跟踪精度Δi+1>ε2,则对区间[ti,ti+1]将按照描述(5)的网格细化策略进一步交替地调节hpi和ki,重新计算Δi+1,直到满足Δi+1≤ε2后才进入下一个离散区间[ti+1,ti+2]计算。
这种策略就不需要当某个离散点处的跟踪精度不满足要求时从头开始重新计算,只需在对应的离散区间内进一步细化网格,可有效地减少计算量。
(8) 按照上述步骤,计算[T1,T2]段每个离散信号的跟踪值,直到它们均满足预设跟踪精度为止。
上述自适应网格TD计算流程如图6所示。
3 仿真分析
此小节通过若干案例来分析验证所提出的AMTD的可行性和有效性,并通过与第1节提到的ATD进行对比分析来展示它的优越性。
3.1 离散点输入信号的跟踪效果
根据表1中离散输入信号的特征,设置AMTD参数:hp=0.01 s,Td=14 s,ε1=0.003,ε2=0.001,mp=2,ml=10,mk=-0.08。仿真结果如图7所示。显然,与直接采用TD和ATD的仿真结果相比,采用本文设计的AMTD可以使得v1在规定的时间内快速、无超调、精确地跟踪离散输入信号yc。尤其是当输入信号在末段存在短时间较大突变时,采用AMTD仍能够使得各离散点处的v1在满足设定的精度要求下跟上输入信号。当v1精确跟踪上输入信号后,v2可视为输入信号的微分。从图7(c)和图7(d)可以看出,第一段因初始跟踪信号值较大,其网格细化程度较大,滤波因子网格细化了6次,速度因子网格细化了7次。中间部分可按照初始设定的hp和k实现精确跟踪。当最后部分因输入信号的突变,滤波因子和速度因子网格均需细化,突变的程度不同,网格细化次数也不同。

图6 自适应网格TD计算流程图Fig.6 Flowchart of adaptive mesh tracking differentiator
为进一步验证本文AMTD的性能,下面将增补两种离散点信号进行仿真。


图7 离散信号的AMTD跟踪效果Fig.7 Tracking effects of AMTD for discrete inputs

图8 离散信号A的AMTD跟踪效果Fig.8 AMTD tracking results for discrete signal A

图9 离散信号B的AMTD跟踪效果Fig.9 AMTD tracking results for discrete signal B
仿真结果表明:AMTD的跟踪效果更好,满足设定的精度要求。TD和ATD不仅跟踪精度相对较差,且存在一定程度的相位延迟,而AMTD不存在相位延迟问题。此外,AMTD对离散输入信号的微分估计最准确,从图中可以看出,其v2几乎和输入信号的真实微分值相重合。因此,本文设计的AMTD不仅展现出了更为精确的跟踪效果,能准确地提取输入信号的微分,而且v1和v2均不存在相位延迟问题。
3.2 AMTD处理连续信号的性能


图10 连续信号x1(t)的跟踪效果对比Fig.10 Comparison of tracking effects of continuous signals x1(t)

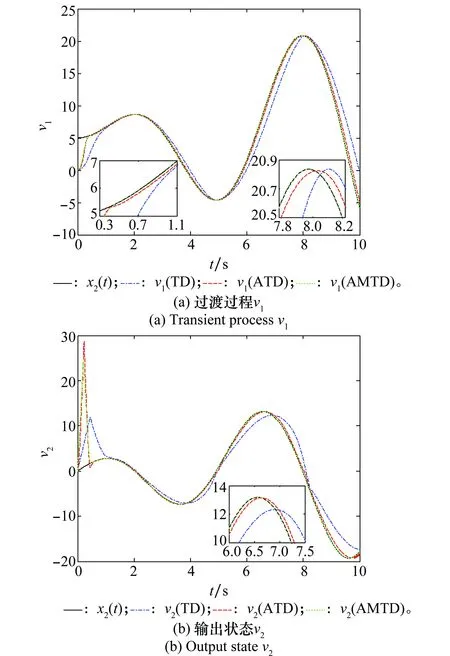
图11 连续信号x2(t)的跟踪效果对比(h=0.002 s)Fig.11 Comparison of tracking effects of continuous signals x1(t), h=0.002 s


图12 连续信号x2(t)的跟踪效果对比(h=0.01 s)Fig.12 Comparison of tracking effects of continuous signals x1(t), h=0.01 s
4 结 论
考虑到采用传统TD给存在大幅度变化的离散输入信号安排过渡过程时,存在较大跟踪误差的问题,本文提出了一种AMTD。通过对离散输入信号分段,并按照设定的网格细化策略依次对由滤波因子和速度因子扩张成的二维网格进行细化,直到跟踪误差满足设定的精度要求为止。通过若干案例仿真验证了本文提出的AMTD的可行性和有效性。该TD具备快速、准确、无超调的跟踪性能,可有效地对大幅度变化的离散输入信号安排合理的过渡过程,而且安排的过渡过程和提取的微分信号均不存在相位滞后。此外,该AMTD在处理连续信号时同样具备这些优越的跟踪性能,而且不受采样步长的影响,具备更好的适应性。
参考文献:
[1] 韩京清, 王伟. 非线性跟踪-微分器[J]. 系统科学与数学, 1994, 14(2): 177-183.
HAN J Q, WANG W. Nonlinear tracking differentiator[J].Systems Science and Mathematical Science, 1994, 14(2): 177-183.
[2] 王新华, 陈增强, 袁著祉,等. 全程快速非线性跟踪-微分器[J]. 控制理论与应用, 2003, 20(6): 875-878.
WANG X H, CHEN Z Q, YUAN Z Z, et al. Nonlinear tracking-differentiator with high speed in whole course[J].Control Theory & Applications, 2003, 20(6): 875-878.
[3] 史永丽, 侯朝桢. 改进的非线性跟踪微分器设计[J]. 控制与决策, 2008, 23(6): 647-650, 659.
SHI Y L, HOU C Z. Design of improved nonlinear tracking differentiator[J].Control Theory & Applications,2008,23(6): 647-650, 659.
[4] 孙彪, 孙秀霞. 离散系统最速控制综合函数[J]. 控制与决策, 2010, 25(3): 473-477.
SUN B, SUN X X. Optimal control synthesis function of discrete-time system[J].Control and Decision,2010,25(3):473-477.
[5] 邵星灵,王宏伦.基于改进sigmoid函数的非线性跟踪微分器[J].控制理论与应用,2014,31(8): 1116-1122.
SHAO X L, WANG H L. Nonlinear tracking differentiator based on improved sigmoid function[J]. Control Theory & Applications, 2014, 31(8): 1116-1122.
[6] 卜祥伟, 吴晓燕, 马震,等. 改进的反正切跟踪微分器设计[J]. 上海交通大学学报, 2015, 49(2): 164-168.
BU X W, WU X Y, MA Z, et al. Design of a modified arctangent-based tracking differentiator[J]. Journal of Shanghai Jiaotong University, 2015, 49(2): 164-168.
[7] 周涛. 基于反双曲正弦函数的跟踪微分器[J]. 控制与决策, 2014,29(6): 1139-1142.
ZHOU T. Tracking differentiator based on inverse hyperbolic sine function[J].Control and Decision,2014,29(6):1139-1142.
[8] 卜祥伟,吴晓燕,张蕊,等.双曲正弦非线性跟踪微分器设计[J].西安交通大学学报,2015, 49(1): 107-111, 138.
BU X W, WU X Y, ZHANG R, et al. Design of a hyperbolic-sine-based nonlinear tracking differentiator[J]. Journal of Xi’an Jiaotong University, 2015, 49(1): 107-111, 138.
[9] 王艳, 刘斌. 基于双曲函数的非线性跟踪微分器[J].系统科学与数学, 2017, 37(2): 321-327.
WANG Y, LIU B. Nonlinear tracking differentiator based on the hyperbolic function[J]. Journal of Systems Science and Mathematical Sciences, 2017, 37(2): 321-327.
[10] WEI Y H, HU Y S, SONG L, et al. Tracking differentiator based fractional order model reference adaptive control: the 1<α<2 case[C]∥Proc.of the 53rd IEEE Annual Conference on Decision and Control, 2014: 6902-6907.
[11] WEI J X, GAO Z. Design and analysis on fractional-order tracking differentiator[C]∥Proc.of the 27th IEEE Chinese Control and Decision Conference, 2015: 6128-6132.
[12] WANG H W, WANG H P. A comparison study of advanced tracking differentiator design techniques[J]. Procedia Engineering, 2015, 99(5): 1005-1013.
[13] NUNES E V L, HSU L, LIZARRALDE F. Global exact tracking for uncertain systems using output-feedback sliding mode control[J].IEEE Trans.on Automatic Control,2009,54(5): 1141-1147.
[14] WANG X H, LIN H. Design and analysis of continuous hybrid differentiator[J]. IET Control Theory and Application, 2011, 5(11): 1321-1334.
[15] ANGULO M T, MORENO J A, FRIDMAN L. Robust exact uniformly convergent arbitrary order differentiator[J]. Automatica, 2013, 49 (8) :2489-2495.
[16] FENG H Y P, LI S J. A tracking differentiator based on Taylor expansion[J].Applied Mathematics Letters,2013,26(7):735-740.
[17] 韩京清, 袁露林. 跟踪-微分器的离散形式[J]. 系统科学与数学, 1999, 19(3): 263-273.
HAN J Q, YUAN L L. The discrete form of tracking-differentiator[J].Systems Science and Mathematical Science,1999,19(3): 263-273.
[18] PENG J L, LIU X, LI J. General form of discrete optimal tracking differentiator[C]∥Proc.of the 27th IEEE Chinese Control and Decision Conference, 2015: 629-633.
[19] 万慧,齐晓慧.跟踪-微分器输出信号相位损失影响因素分析[J].系统科学与数学,2017,37(3): 665-673.
WAN H, QI X H. Analysis on affected factors on phase loss of output signals based on tracking-differentiator[J]. Systems Science and Mathematical Science, 2017, 37(3): 665-673.
[20] 景奉水, 梁自泽, 侯增广, 等.自适应跟踪微分器的研究[C]∥第二十一届中国控制会议论文集,2002: 319-322.
JING F S, LIANG Z Z, HOU Z G, et al. Study on adaptive tracking differentiator[C]∥Proc.of the 21st Chinese Control Conference, 2002: 319-322.
[21] QIAO G H, SUN M L, ZHANG R, et al. An improved self-adaptive tracking differentiator[C]∥Proc.of the IEEE International Conference on Information and Automation, 2009: 980-984.
[22] 范宏伟, 王洪福, 张伟明. 基于跟踪-微分器的宽动态测速系统设计[J]. 电光与控制, 2012, 19(8): 59-62.
FAN H W, WANG H F, ZHANG W M. Wide range velocity measurement system based on tracking-differentiator[J]. Electronics Optics & Control, 2012, 19(8): 59-62.
[23] 张帆, 徐华中, 向云, 等. 针对含噪信号的自适应跟踪微分器改进研究[J]. 电光与控制, 2017, 24(3): 60-63.
ZHANG F, XU H Z, XIANG Y, et al. Improvement on adaptive tracking differentiator for noisy signal[J]. Electronics Optics & Control, 2017, 24(3): 60-63.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
数学年刊A辑(中文版)(2021年4期)2021-02-12
中国惯性技术学报(2020年2期)2020-07-24
成都信息工程大学学报(2019年2期)2019-08-28
劳动保护(2018年5期)2018-06-05
华人时刊(2018年23期)2018-03-21
中华建设(2017年3期)2017-06-08
