火箭橇轨道系统有限元建模及振动特性研究
2018-07-31 04:24张雨诗余元元赵良玉
兵器装备工程学报 2018年7期
张雨诗,余元元,赵良玉
(1.北京理工大学宇航学院, 北京 100081;2 中航工业集团公司航宇救生装备有限公司, 湖北 襄阳 441003)
火箭橇是一种沿地面固定轨道高速滑行,能模拟武器系统部件高速飞行、航天器发射与在轨动态飞行的一种地面试验设备。在试验过程中,将被试对象固定在火箭橇体上,在火箭发动机的推动下,载有被考核产品的火箭橇体沿专门建造的高精度轨道高速滑行,完成产品性能考核[1]。
国内外诸多火箭橇试验表明,由于滑橇与滑轨之间的动力学耦合作用,在一定的运行速度下,火箭橇能够直接激励产生滑轨的共振波,诱导滑轨共振,导致滑轨断裂和测试试验失败。在美国霍洛曼空军基地的高精度滑橇测试轨道(HHSTT)试验中,就发生过两次滑轨断裂事故,不仅造成了巨大的经济损失,还使后续一系列的PAC-3高速火箭橇试验被取消[2]。
在火箭橇轨道动力学方面的研究始于美国。Laird等[3-4]利用hydrocode CTH软件,针对超音速下的火箭橇滑靴-滑轨撞击过程进行仿真,建立了二维平面下的滑靴-滑轨交互耦合模型,获得了与试验测试结果相匹配的计算结果。Hale[5]通过对滑轨和滑靴材料的属性分析,指出在火箭橇高速运行的过程中,滑靴与滑轨之间发生磨损现象。Lamb[6]针对HHSTT两次滑轨断裂的试验,通过对滑轨建模,分析了弹性波的传播特性,认为火箭橇滑轨共振是导致滑轨断裂的一个重要因素,得到了滑轨速度-频率共振通频带,指出火箭橇在特定运行速度下会引起滑轨共振,导致滑轨断裂。
上述成果都以简化的Euler-Bernoulli梁或Timoshenko梁模型进行研究,未充分考虑具体轨道截面对振动特性的影响,不能准确地反映滑轨的振动特性。为了深入研究导致滑轨断裂的一种因素——滑轨共振,本文根据具体的轨道截面利用有限元方法对火箭橇轨道系统的振动特性进行分析,找出0~2 000 Hz下的危险速度,为后期研究提供可靠的理论依据,降低危害发生的风险。
1 火箭橇轨道系统的有限元建模
本文选取HHSTT为研究对象[7],火箭橇轨道结构如图 1所示,地基由混凝土浇筑“H”型梁,横向和垂向扣件由螺栓与地基中的预留钢板连接,通过横向和垂向扣件实现对滑轨的约束。其主要部件的材料参数如表1所示。
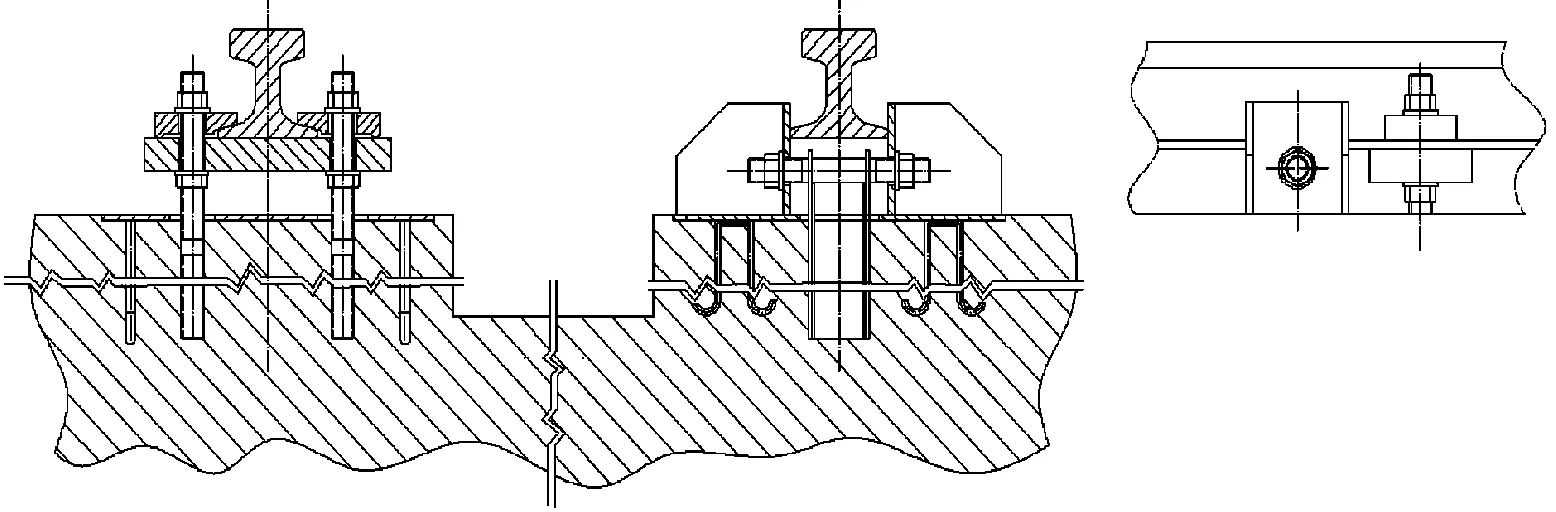
图1 火箭橇轨道结构示意图

组成部分单元类型密度/(kg·m-3弹性模量/Pa泊松比刚度/(N·m-1)阻尼/(N.s·m-1))滑轨Timoshenko梁 Beam1887.85×1032×10110.3扣件弹簧Combin145×1081×102
利用ANSYS18.0软件建立火箭橇轨道系统有限元模型。根据已知的轨道几何形状及几何参数建立梁模型的轨道截面。滑轨由周期性的扣件支承,且梁的高度较大,必须考虑剪切变形对于梁的影响,因此将滑轨取为周期性Timoshenko梁模型,采用Beam188单元表示。
为研究滑轨的振动特性,仅考虑滑轨水平和竖直扣件对滑轨的固定和提供的弹性作用。将扣件离散为弹簧单元,采用弹簧阻尼单元Combine14进行模拟。如图2所示,在轨道两侧施加固定约束,在模型中部施加垂向或水平载荷,考虑垂向扣件和水平扣件约束。简化的弹簧组跨度为1.25 m,弹簧单元一端施加固定约束,另一端与轨道的节点相连。

图2 火箭橇滑轨有限元模型
2 谐响应分析
滑轨振动属于宽频振动,为了研究滑轨在不同频率下的振动特性,对滑轨模型中部施加垂向和横向简谐荷载。由参考文献[7]可知,火箭橇滑轨的冲击频率随着试验速度的增大而增大,美国HHSTT最大试验速度为5马赫时,冲击频率不超过2 000 Hz。目前国内外火箭橇滑轨试验速度多集中在5马赫以下,故本文主要分析滑轨0~2 000 Hz范围内的振动特性。并引用位移导纳参数分析滑轨振动特性,其中定义位移导纳Y是滑轨截面上某一点位移与作用力的比值,数值上为位移阻抗Z的倒数,如下式所示。
(1)
2.1 谐响应分析基本理论
谐响应分析通常选择简谐荷载作为激励,它是一种形式较为简单的反复荷载,主要用于研究荷载频率变化对结构动力特性响应。在周期变化荷载作用下,结构以荷载频率做周期振动。周期荷载作用下的运动方程为[8]:
(2)
力和位移均为简谐的,频率为ω,则:
{U}={Umax}eiφeiωt
{F}={Fmax}eiψeiωt
(3)
式(3)中,Umax为位移幅值,Fmax为力幅值,φ为位移相角(弧度),ψ为力相角(弧度)。可写成:
{U}=({U1}+i{U2})eiωt
{F}=({F1}+i{F2})eiωt
(4)
则谐响应分析运动方程为:
[K]-ω2[M]+iω[C]({U1}+i{U2})={F1}+i{F2}
(5)
以有限元模型为基础,以有限元方法为手段,通过数值求解式(5),就可以得到火箭橇滑轨在激励频率下的响应和频率响应曲线,通过曲线可以提取响应峰值的相关数据,即滑轨的共振频率。
2.2 轨道周期梁模型的长度无关性分析
在建立轨道周期梁模型时,模型长度直接影响运算速度以及计算结果的精度,如果滑轨模型较长则计算量过大,计算速度慢;如果滑轨模型太短,则与实际轨道条件相差太远,还会受到滑轨端部反射波干扰,影响计算精度。国内外的高速火箭橇滑轨均为多根滑轨首尾焊接而成的一整根滑轨,为了选取最合适简化长度,本文分别计算125 m,500 m,800 m和1 000 m轨道在0~800 Hz下的谐响应进行长度无关性分析。三种长度滑轨的横向和垂向位移随频率变化的曲线如图3和图4所示。由图3可以看出,在滑轨的横向位移上125 m滑轨误差较大,500 m、800 m和1 000 m滑轨横向响应几乎一致。由图4可以看出,三种长度滑轨在垂向的响应基本一致。基于准确性与计算效率的考虑,选取500 m长滑轨作为最终的简化周期梁模型。
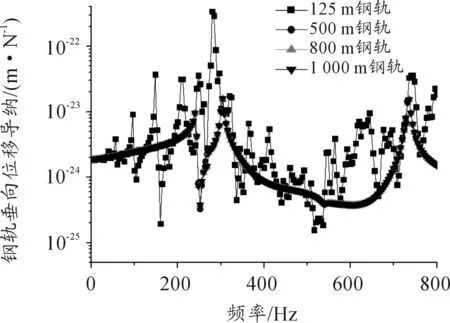
图3 滑轨横向谐响应曲线
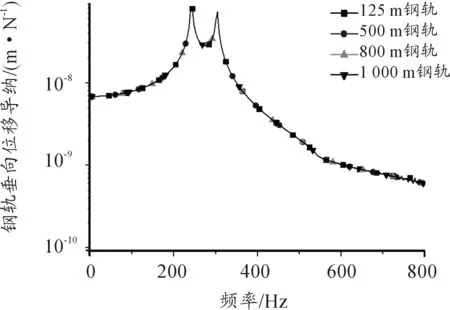
图4 滑轨垂向谐响应曲线
2.3 仿真结果分析
滑轨在除静力外的任何频率激扰下都产生振动。在不同频率滑轨的振动中,有两种典型频率振动:滑轨共振和滑轨pinned-pinned振动[9]。共振频率也被称为起跳频率,根据轨下支承刚度的不同,滑轨共振出现的频率不同[10]。滑轨pinned-pinned振动与滑轨截面类型、滑轨重量以及滑轨的支承间距有关[11]。
2.3.1 垂向激励下的垂向响应
对500 m的周期梁模型进行垂向加载谐响应分析,主要位移在垂向方向上。其0~2 000 Hz的响应曲线如图5所示,分别提取响应峰值244 Hz、300 Hz、1 008 Hz和1 688 Hz的轨道振型进行分析,并通过提取相应频率下各节点的位移确定激励点所在节点处的振动波长。
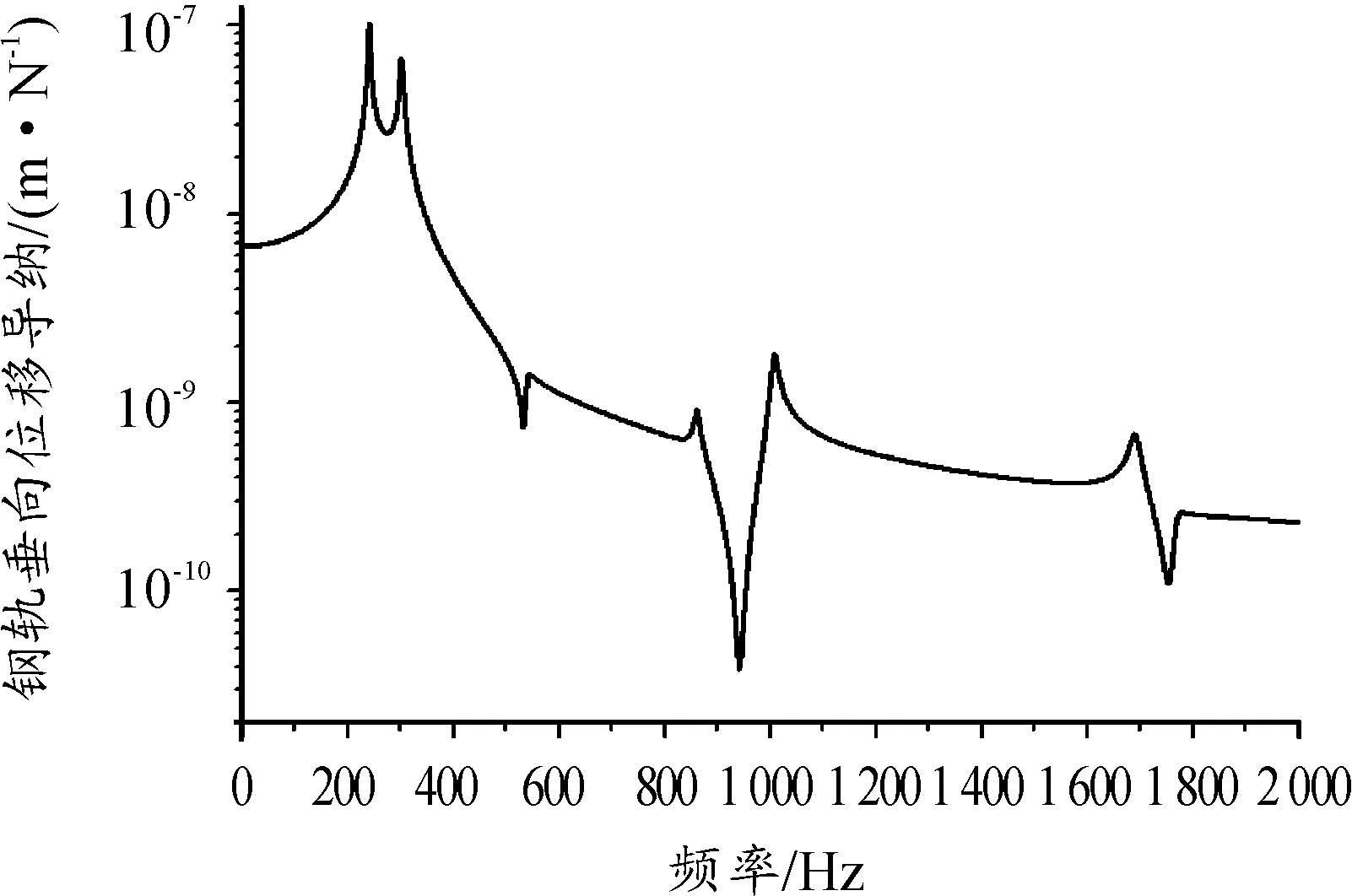
图5 垂向激励下的0~2 000 Hz垂向响应
图6~图9是提取以激励点为中心的三个支承间距的振型图,可从滑轨侧面观察垂向的变形。
如图6所示,在频率244 Hz时滑轨出现一阶pinned-pinned振动,垂向振动波长为2.525 m,约为两个支承间距(本文支承间距为1.25 m)。
如图7所示,在频率300 Hz处,滑轨出现共振。滑轨从激励点两侧开始上翘、起跳,此时振动波长为2.300 m。
如图8所示,在1 008 Hz时,滑轨出现二阶pinned-pinned振动,该频率波长为1.025 m。
如图9所示,在1 688 Hz时,滑轨出现pinned-pinned三阶振动,一个支承间距大约出现一个半波形,波长为0.850 m。
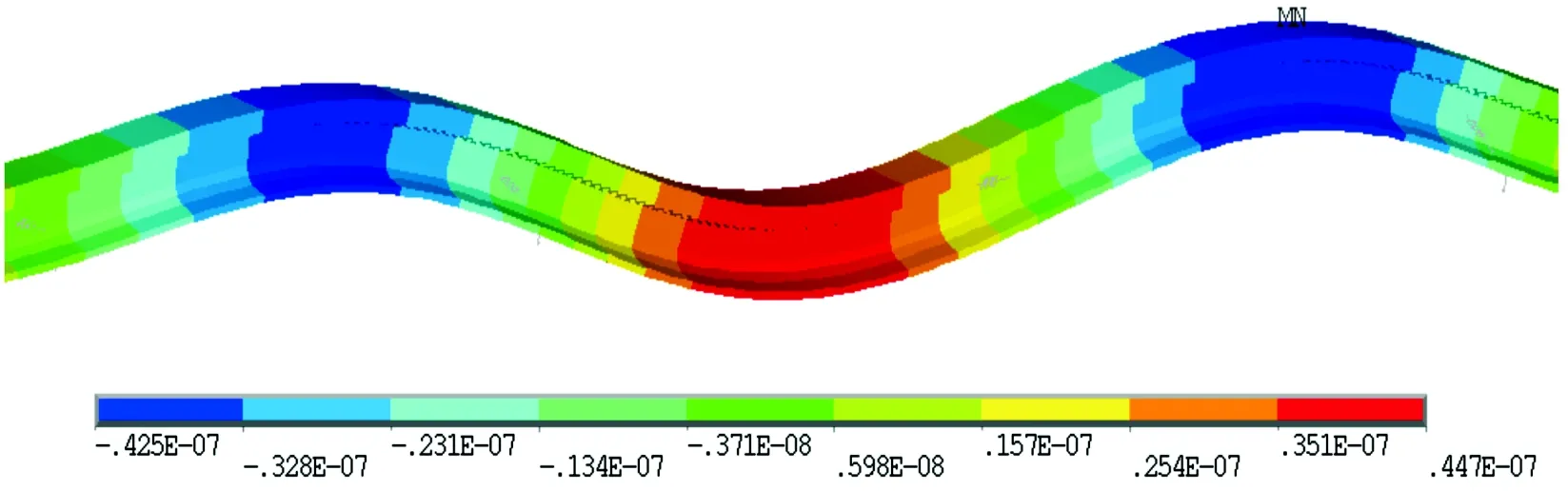
图6 244 Hz垂向响应振型(1阶pinned-pinned振动)

图7 300 Hz垂向响应振型(起跳频率)
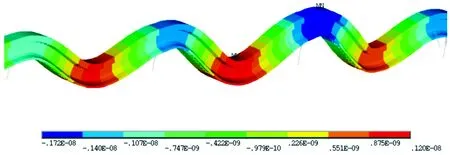
图8 1 008 Hz垂向响应振型(2阶pinned-pinned振动)

图9 1 688 Hz垂向响应振型(3阶pinned-pinned振动)
2.3.2 横向激励下的横向响应
对500 m长周期梁模型进行横向加载的谐响应分析,主要位移在水平方向上。其0~2 000 Hz的响应曲线如图10所示,分别提取响应峰值132 Hz、236 Hz、468 Hz、516 Hz、748 Hz、1 096 Hz和1 760 Hz的轨道振型进行分析,同样通过提取相应频率下各节点的位移确定激励点所在节点处的振动波长。
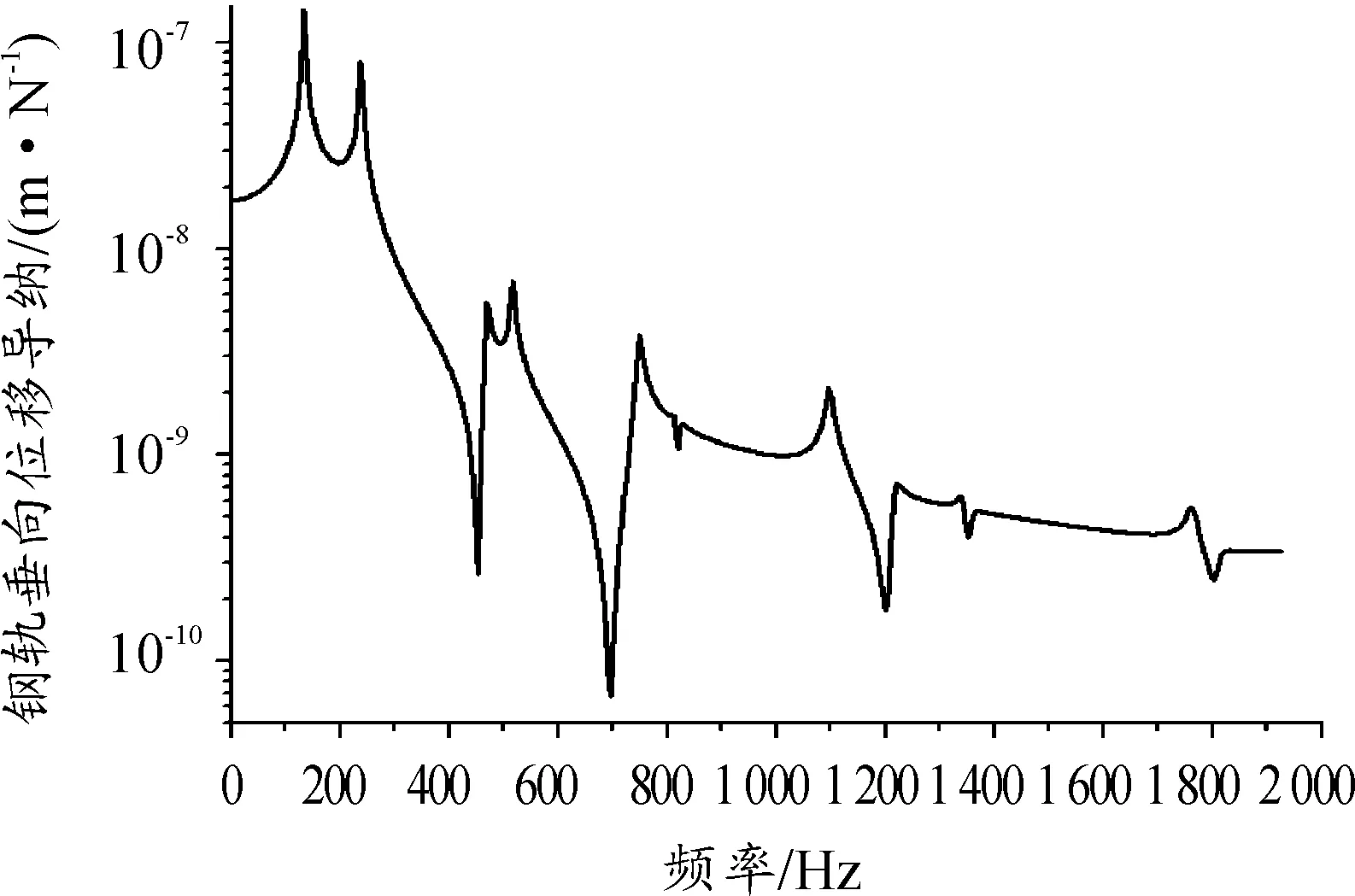
图10 横向激励下的0~2 000 Hz横向响应
图11~图17是提取以激励点为中心的三个支承间距振型图,可从滑轨上方观察水平方向变形。
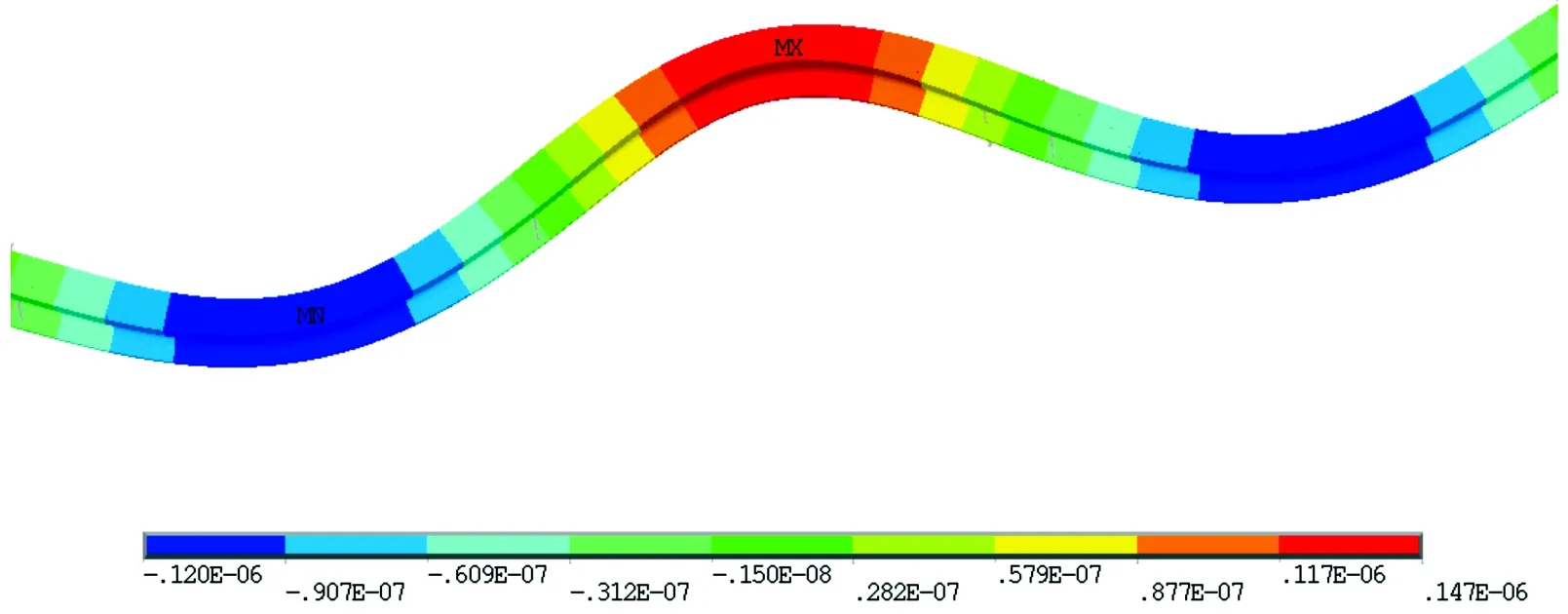
图11 132 Hz横向响应振型(1阶pinned-pinned振动)
如图11所示,在频率132 Hz时滑轨出现一阶pinned-pinned振动,垂向振动波长为2.525 m,大约为两个支承间距。
如图12所示,在频率236 Hz处,滑轨出现共振,滑轨从激励点两侧开始向水平方向上翘、起跳,波长为2.000 m。
如图13所示,在468 Hz时,滑轨出现二阶pinned-pinned振动,该频率对应波长为1.950 m。
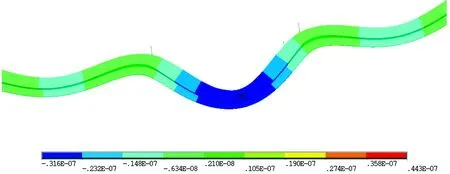
图12 236 Hz横向响应振型(起跳频率)
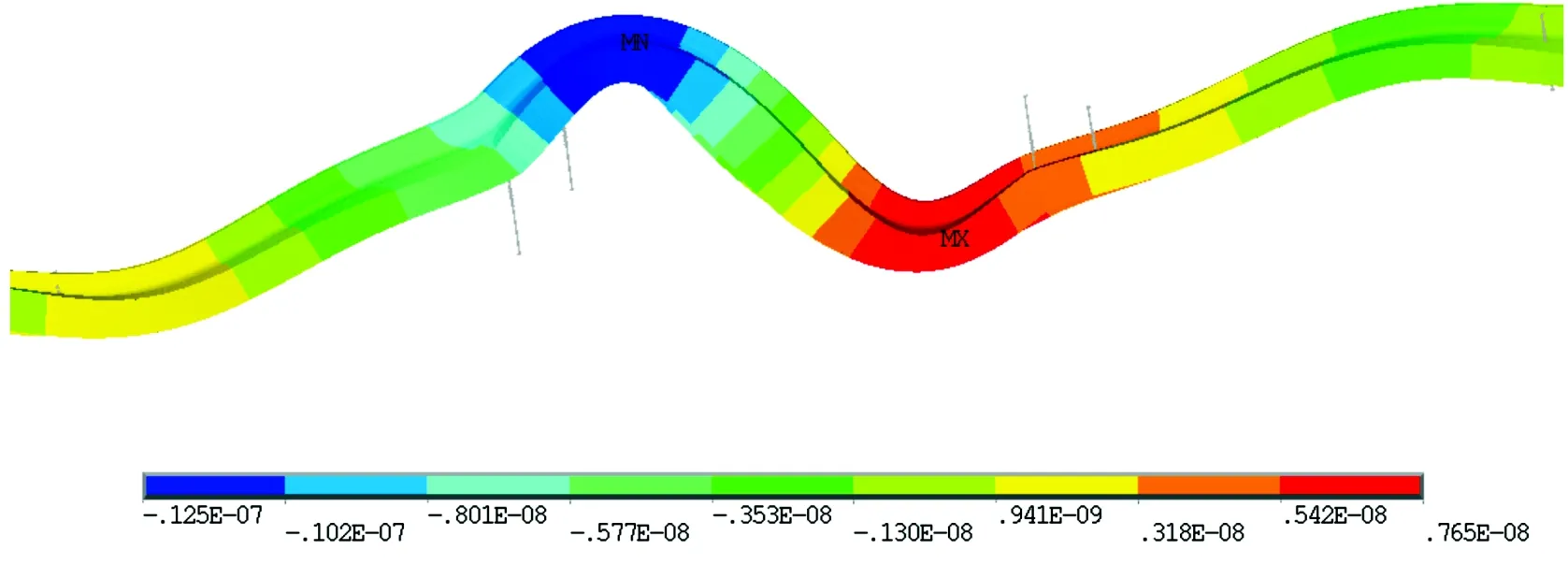
图13 468 Hz横向响应振型(2阶pinned-pinned振动)

图14 516 Hz横向响应振型(3阶pinned-pinned振动)
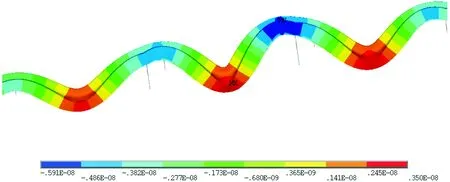
图15 748 Hz横向响应振型(4阶pinned-pinned振动)
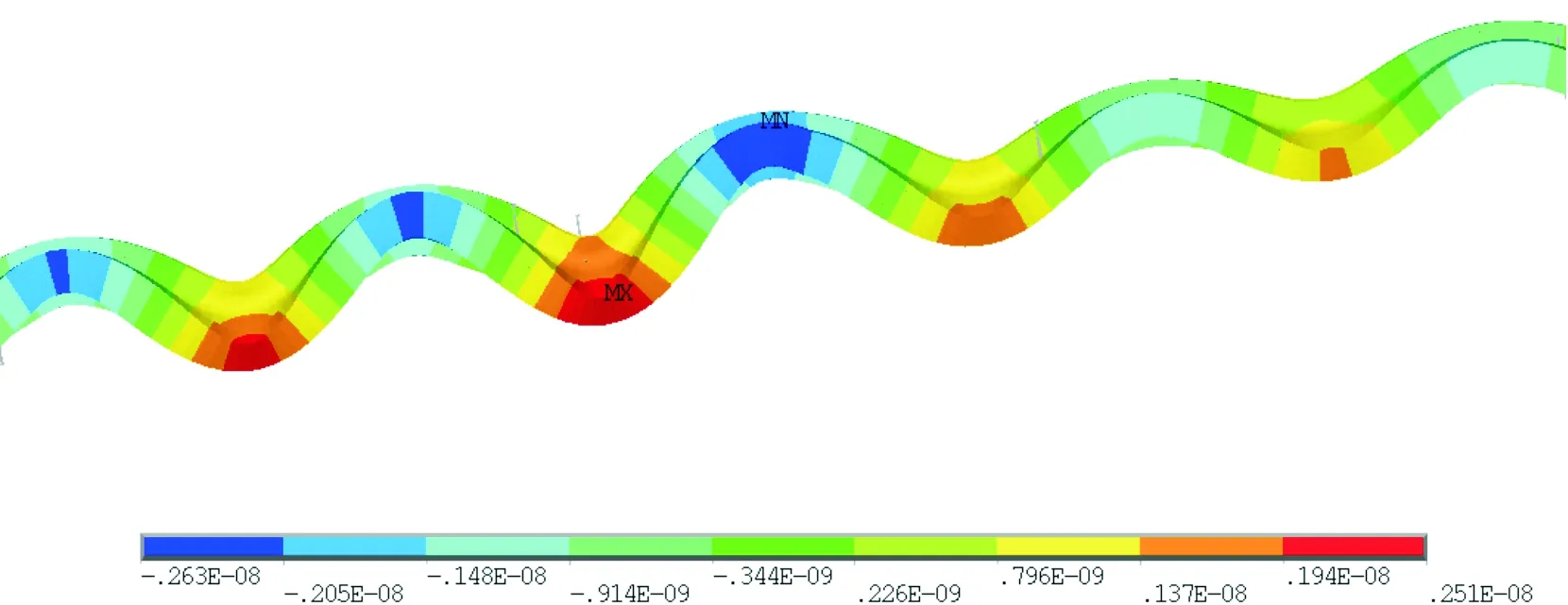
图16 1 096 Hz横向响应振型(5阶pinned-pinned振动)
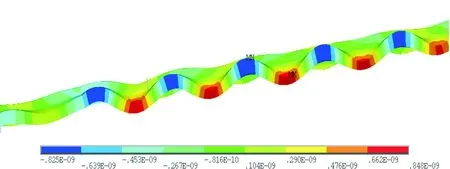
图17 1 760 Hz横向响应振型(6阶pinned-pinned振动)
如图14~图17所示,在516 Hz、748 Hz、1 096 Hz和1 760 Hz下,分别出现三到六阶pinned-pinned振动,其波长分别为1.325 m、1.025 m、0.925 m和0.850 m。
从图6~图9可以看出,在垂向激励下随着振动频率的增大,滑轨垂向振动波长呈减小的趋势;从图11~图17可以看出,在横向激励下随着振动频率的增大,滑轨横向振动波长同样呈减小的趋势。
2.4 共振速度分析
由于滑车与滑轨之间的交互作用,滑车在滑轨上运动时会激发多种频率的弹性波,若弹性波的振动频率与共振频率和pinned-pinned振动频率一致,则会在滑轨中激发共振。为了避免危险的发生,得到共振频率和pinned-pinned振动频率对应的滑车运行速度显得尤为重要。
每个弹性波可以由它的运行速度v,波长λ和冲击频率f来描述,三者之间的数学关系为:
(6)
根据前述振动特性分析,得出垂向和横向激励下的共振频率和pinned-pinned振动频率以及对应波长,代入公式(6)求得对应的滑车运行速度如表2所示。
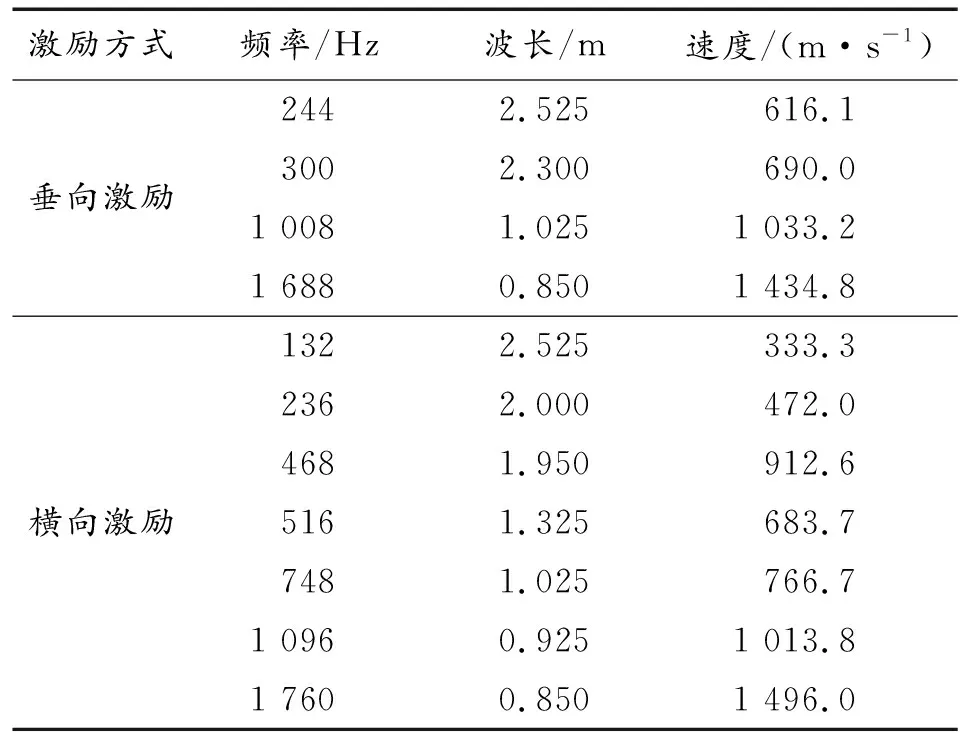
表2 滑车引起的共振波
如果滑车以表2的速度滑行,撞击频率恰好与共振或pinned-pinned振动频率一致,则会激励出与滑轨固有频率一致的弹性波,引起滑轨共振,使振动幅度显著增大。在这种情况下,若滑轨局部应力过高以至超出材料的屈服极限,将会导致滑轨断裂这类事故的发生。所以,在火箭橇试验中应尽量避免系统振动频率与共振波一致,减少危险发生的可能性。
3 结论
本文通过对火箭橇滑轨周期梁模型施加纵向和横向激励进行有限元仿真研究,分析滑轨的振动特性,得出如下结论:
1) 如果滑车的撞击频率与滑轨共振或pinned-pinned振动频率一致,则会激励出共振波,引起滑轨共振,因此应尽量避免滑车的运行速度长时间工作于共振速度附近。
2) 在0~2 000 Hz频率范围施加垂向激励时,出现三个pinned-pinned振动频率和一个共振频率;施加横向激励时,出现六个pinned-pinned振动频率和一个共振频率,横向激励出现的共振频率及共振速度多于垂向,横向激励更为危险,故在火箭橇试验中应更加注意防范横向激励造成的危害。
3) 本文在有限元建模过程中对约束条件、材料参数及滑轨截面形状进行了合理简化,计算结果与真实情况相比具有一定偏差。
4) 建模过程中仅考虑扣件对于滑轨的约束,未考虑滑轨下地基“H”型梁对于滑轨的影响,在以后的研究中应进一步完善模型。
5) 本文仅进行了0~2 000 Hz下的振动特性研究,随着火箭橇试验速度的增大,冲击频率也会随之增大。有必要进一步增大分析频率的范围,为今后高速甚至超高速试验提供更大范围内的基础数据。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
铁道勘察(2022年2期)2022-04-19
林产工业(2022年3期)2022-03-24
铁道学报(2021年8期)2021-09-09
时代农机(2020年5期)2020-07-31
铁路技术创新(2020年6期)2020-02-25
计算机测量与控制(2019年6期)2019-06-27
空气动力学学报(2018年6期)2018-12-03